| Innovative Design |
|


|
|
|
| Gait planning and obstacle-surmounting performance analysis of wheel-track-leg composite bionic robot |
Hong-bin RUI( ),Lu-lu LI(),Wei CAO,Tian-ci WANG,Kai-wen DUAN,Ying-hui WU ),Lu-lu LI(),Wei CAO,Tian-ci WANG,Kai-wen DUAN,Ying-hui WU |
| School of Mechanical and Precision Instrument Engineering,Xi’an University of Technology,Xi’an 710048,China |
|
|
|
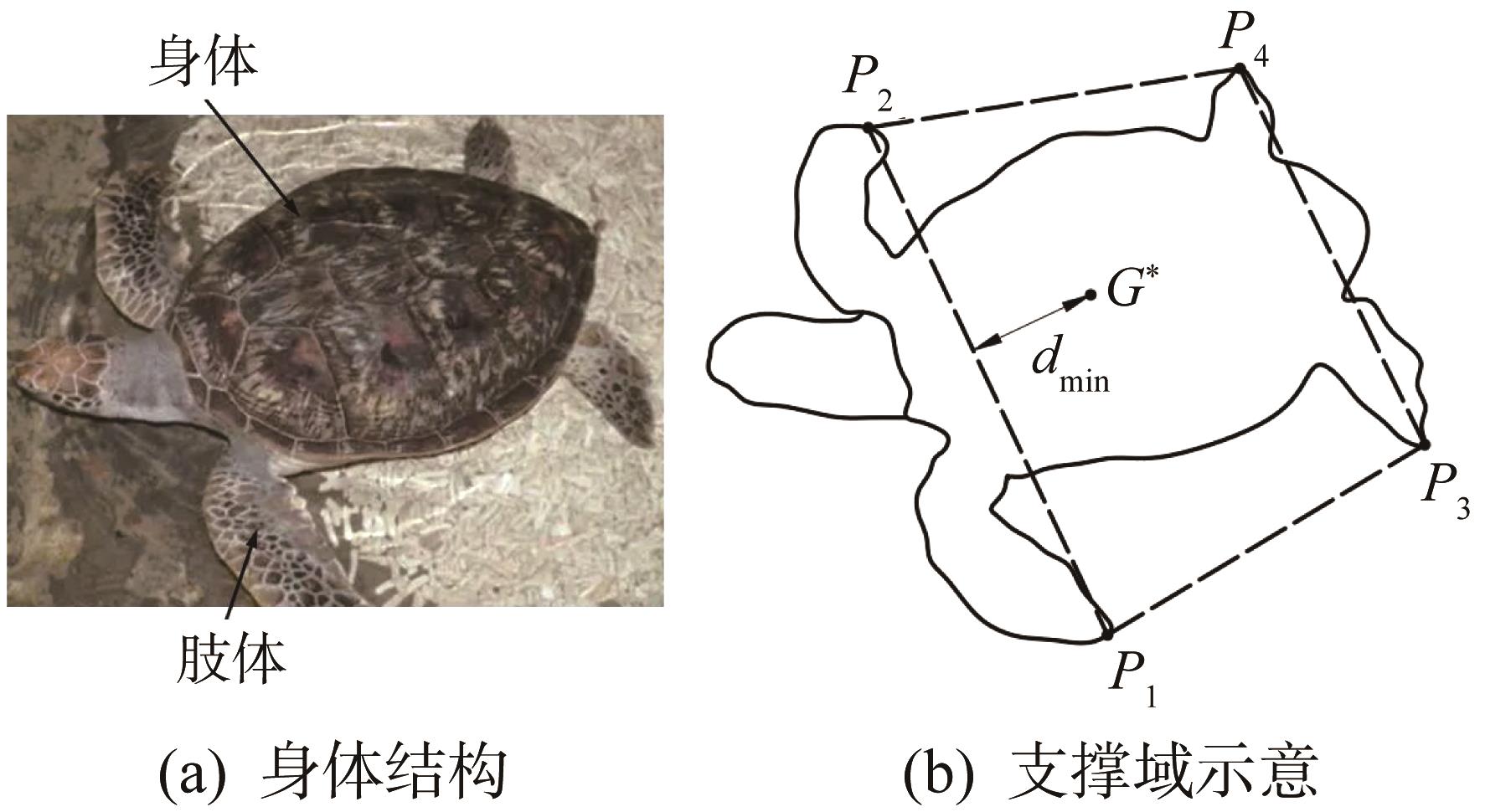
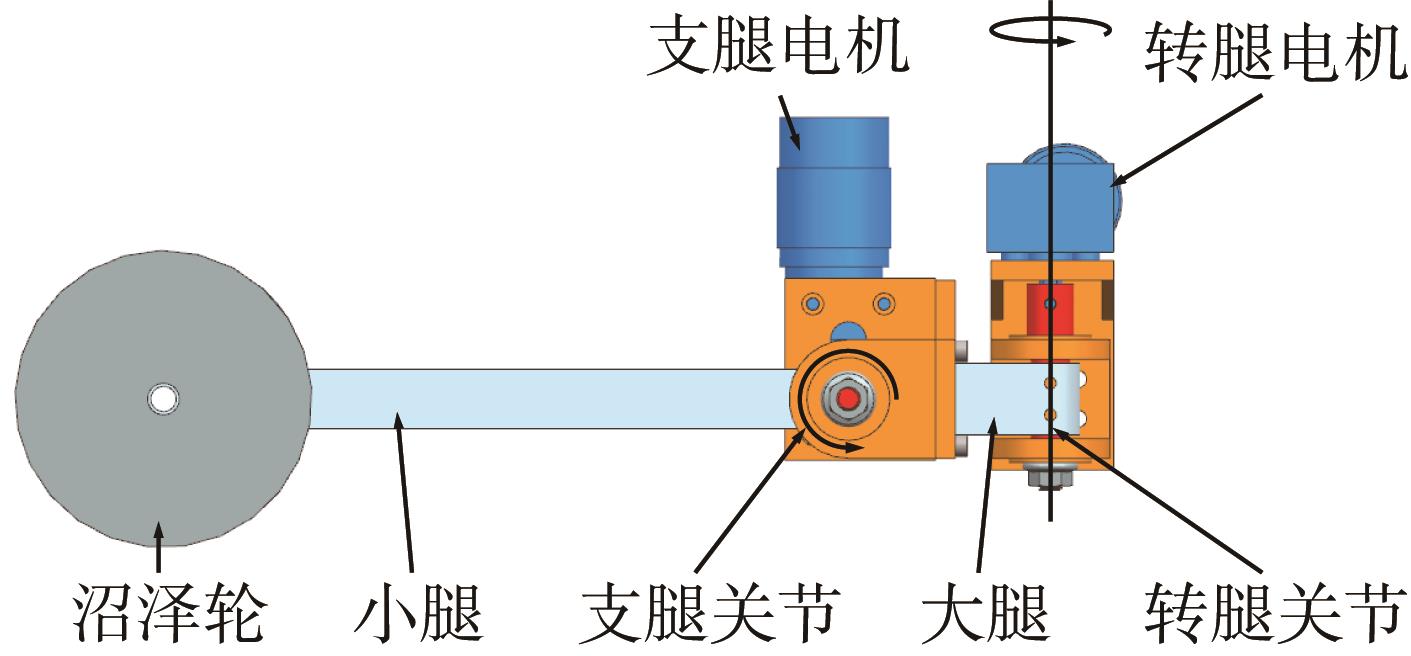
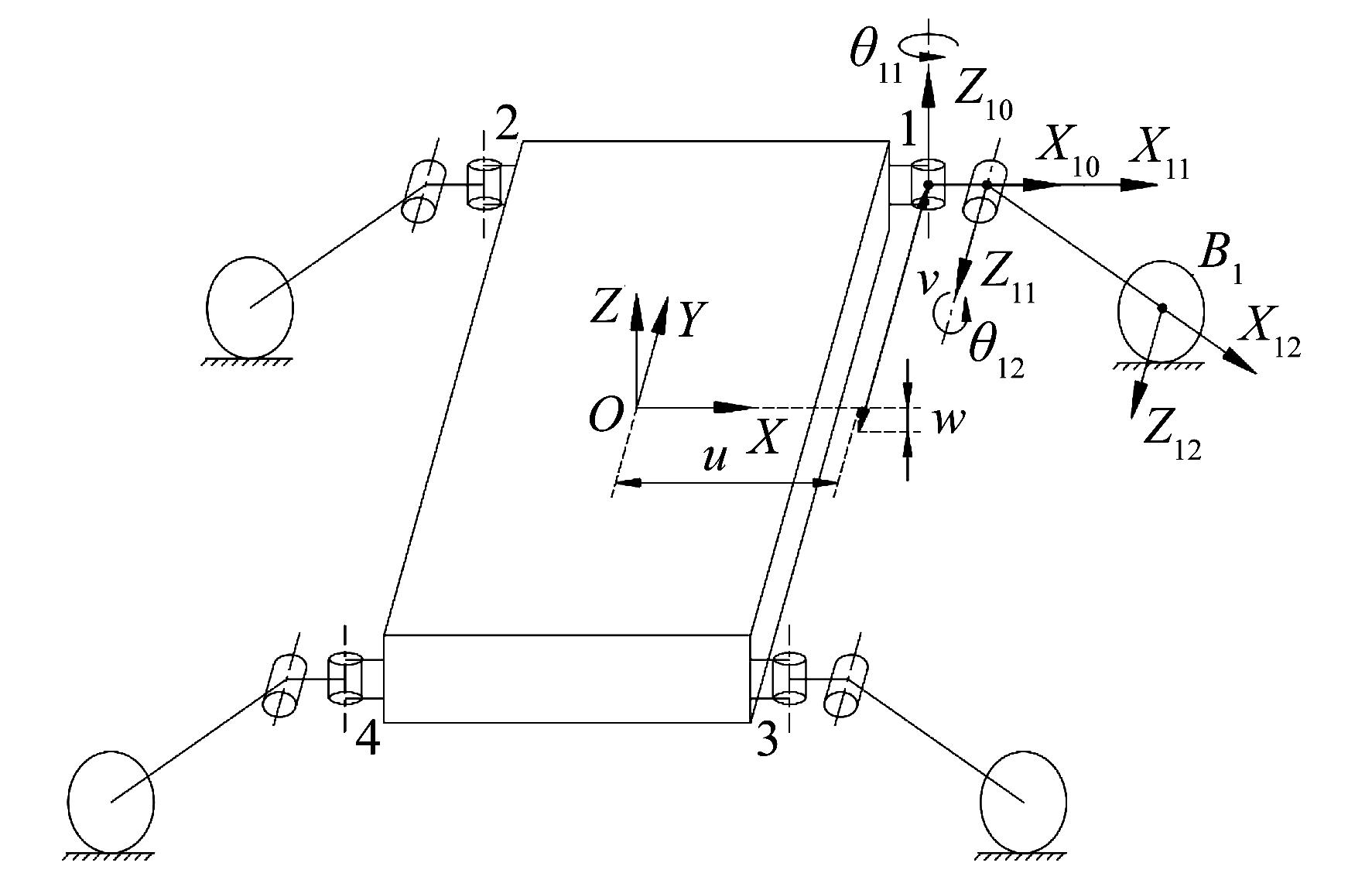
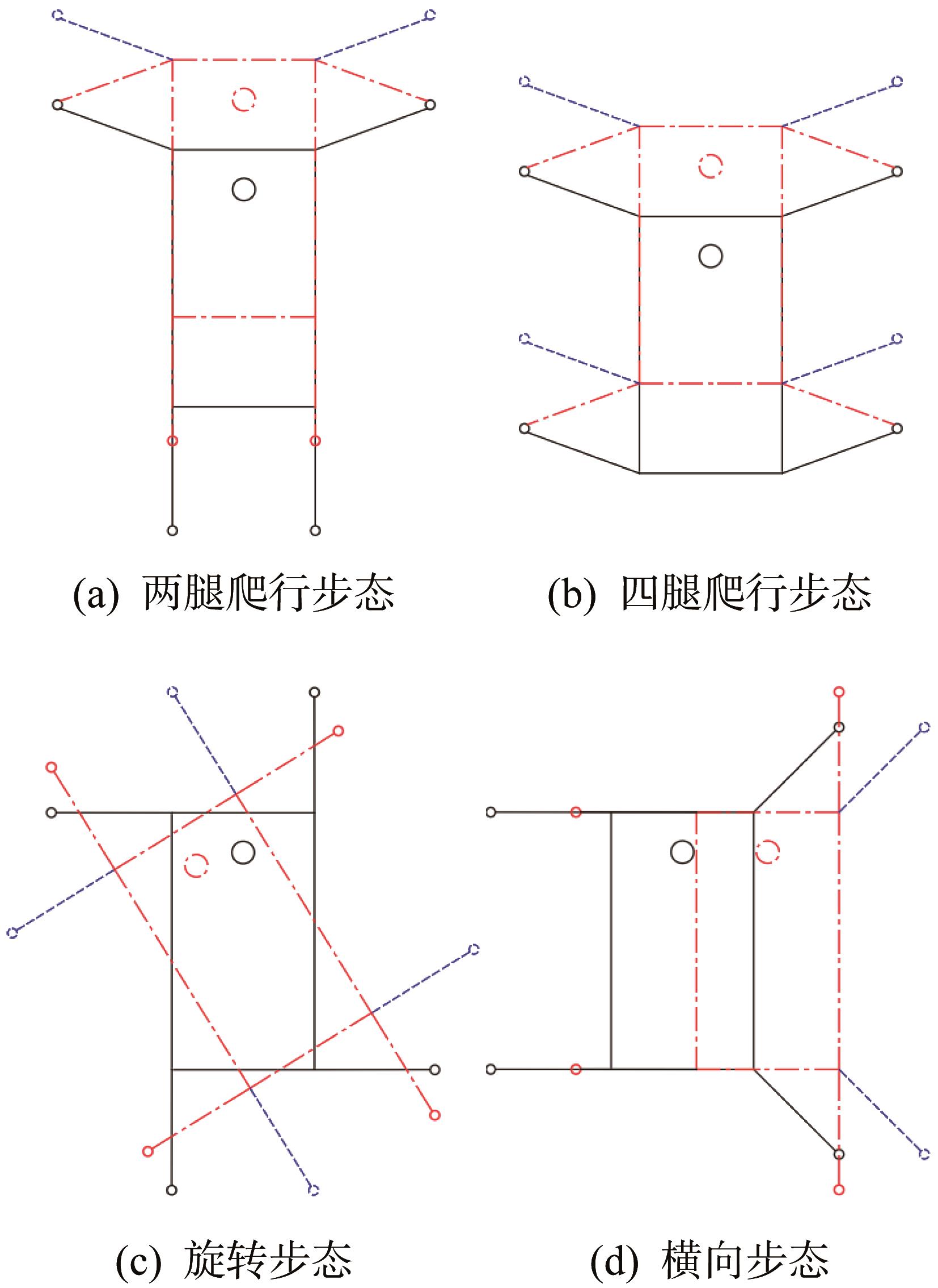
Abstract In order to improve the obstacle-surmounting performance of mobile robots and realize autonomous obstacle-surmounting, a wheel-track-leg composite bionic robot was designed, and its gait planning and obstacle-surmounting performance were analyzed.Firstly, taking the turtle as the bionic object, through analyzing its body structure and stability mechanism, the wheel-track-leg composite mobile mechanism and the two degree of freedom leg structure of the robot were designed; at the same time, based on the structural characteristics of the robot, the coordinate system was established by D-H (Denavit-Hartenberg) method, and the kinematic equation of its leg was solved. Then, by observing the turtles crawling process, the movements in a single crawling gait cycle were decomposed into leg release, crawling, leg lift and leg swing. Combined with the kinematic model, the gait planning for the robot was carried out, and four imitation turtle crawling gaits were proposed. And then, taking the four-legged crawling gait of the robot as an example, the force of its leg joint was analyzed by the statics method. Then, through analyzing the process of the robot crossing trench and climbing step, the obstacle-surmounting performance was evaluated by taking the maximum crossing trench width and climbing step height as the index. Finally, the robot experimental prototype was made to carry out the gait experiment and obstacle-surmounting experiment. The experiment results showed that the robot could use four imitation turtle crawling gaits to realize lateral movement, longitudinal movement and in-situ rotation, and had good obstacle-surmounting performance and stability; the robot could cross the trench with a maximum width of 434 mm and climb the step with a maximum height of 175 mm.The experimental results further verified that the designed imitation turtle mechanical structure was feasible, the planned imitation turtle crawling gait was reasonable, and the established theoretical model of obstacle-surmounting was correct. The research results can provide reference for the structural optimization and obstacle-surmounting performance improvement of mobile robots.
|
|
Received: 08 July 2021
Published: 06 May 2022
|
|
|
|
Corresponding Authors:
Lu-lu LI
E-mail: Hongbin.rui@126.com;1515609245@qq.com
|
轮-履-腿复合仿生机器人步态规划及越障性能分析
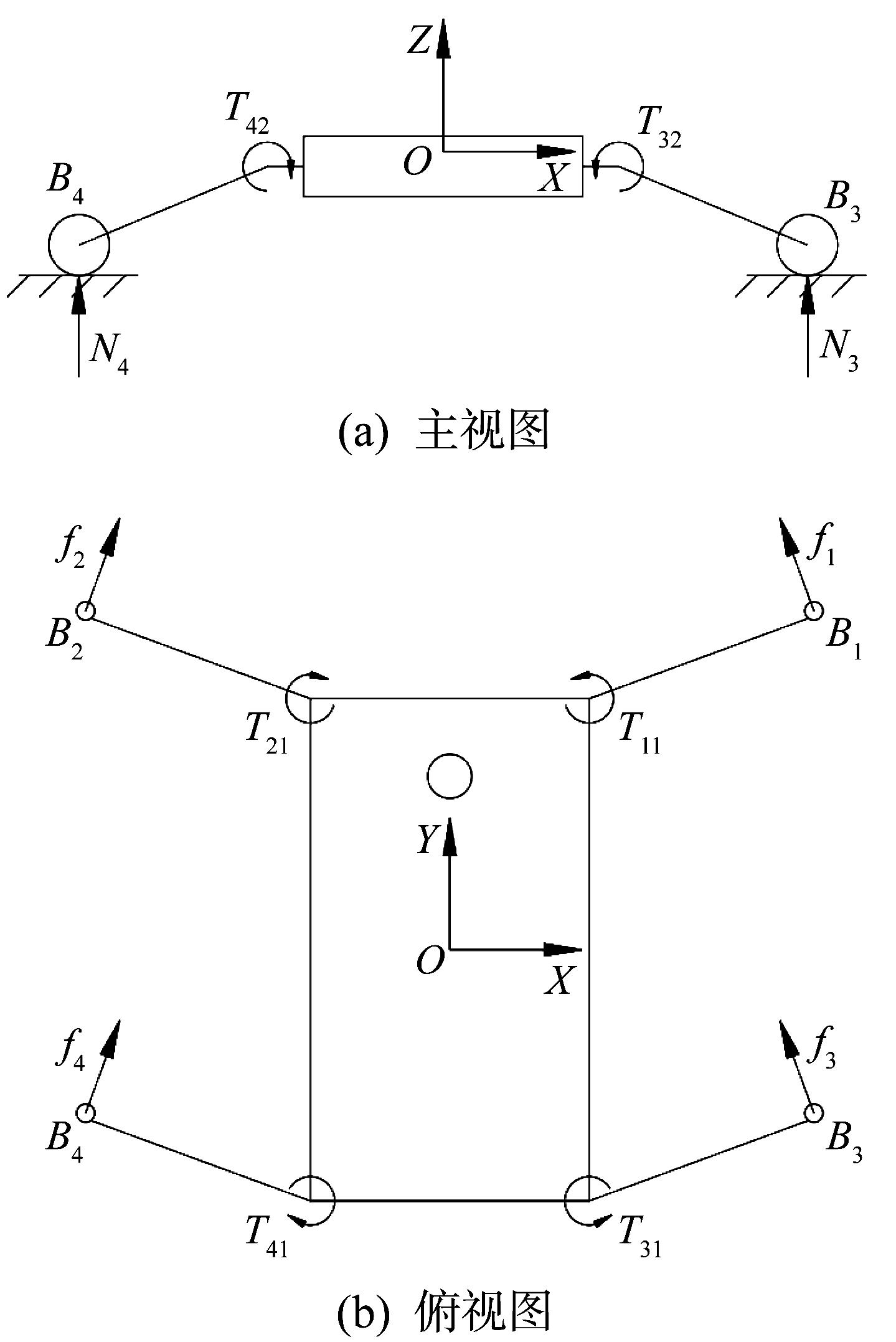
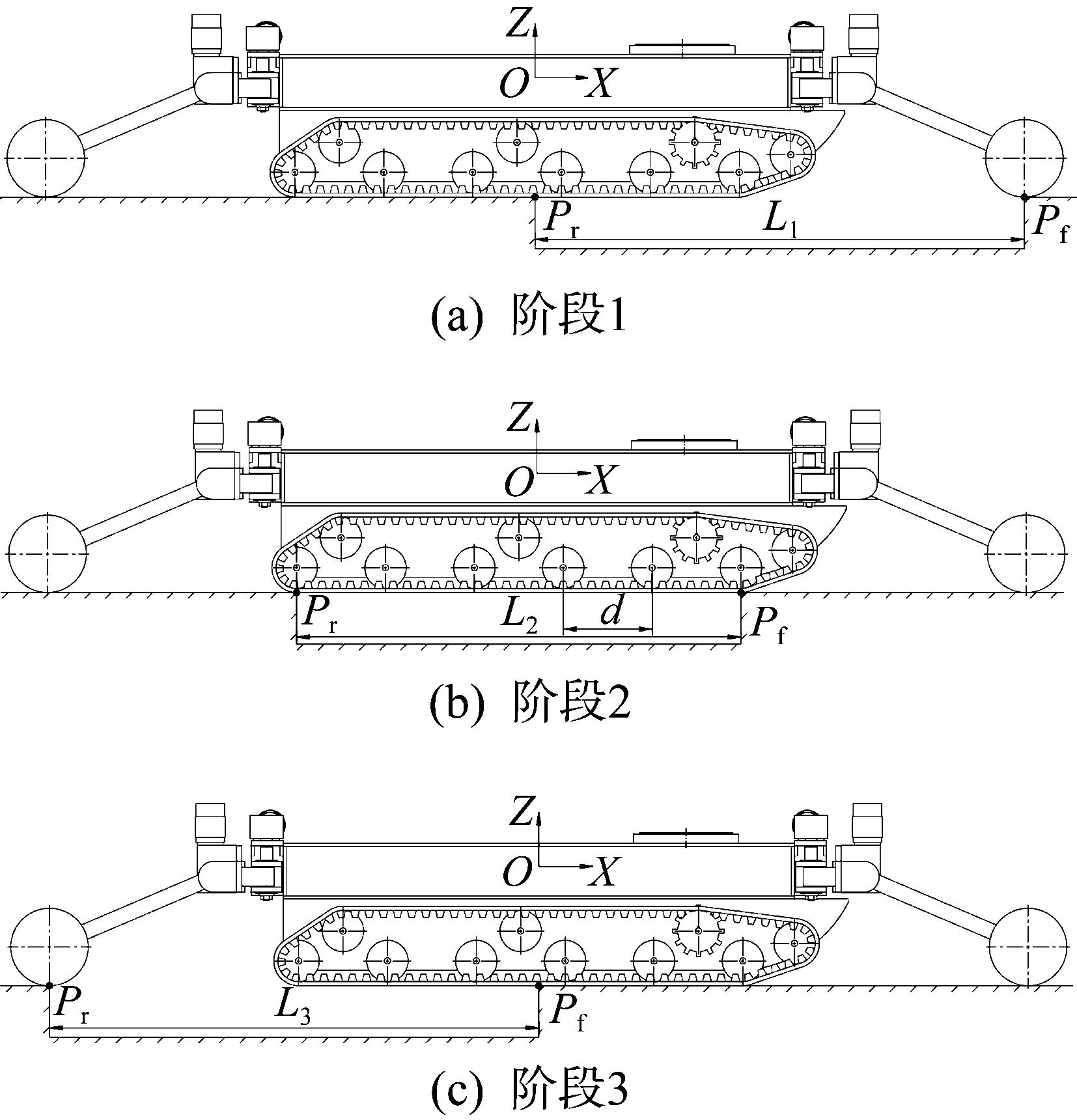
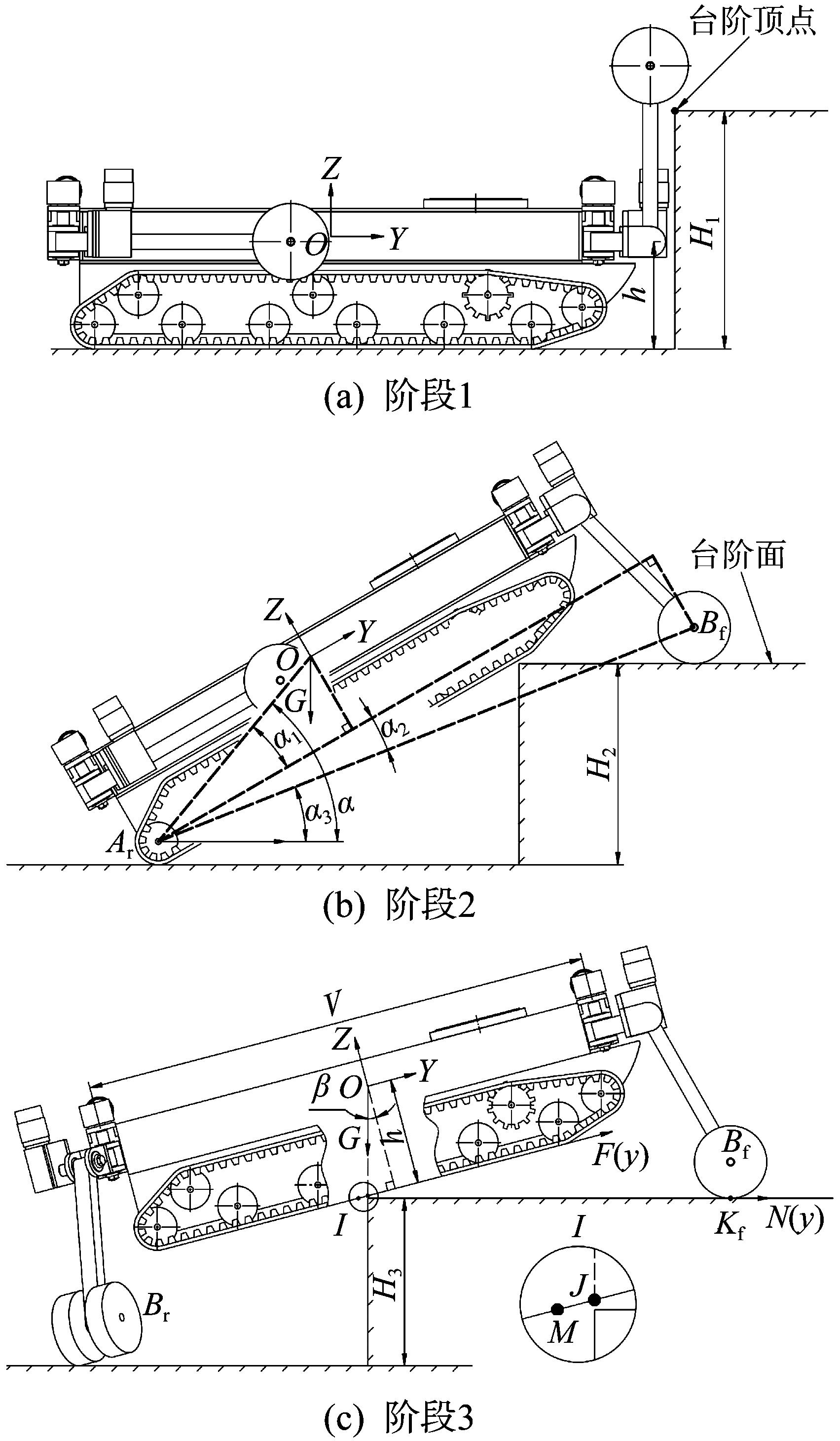
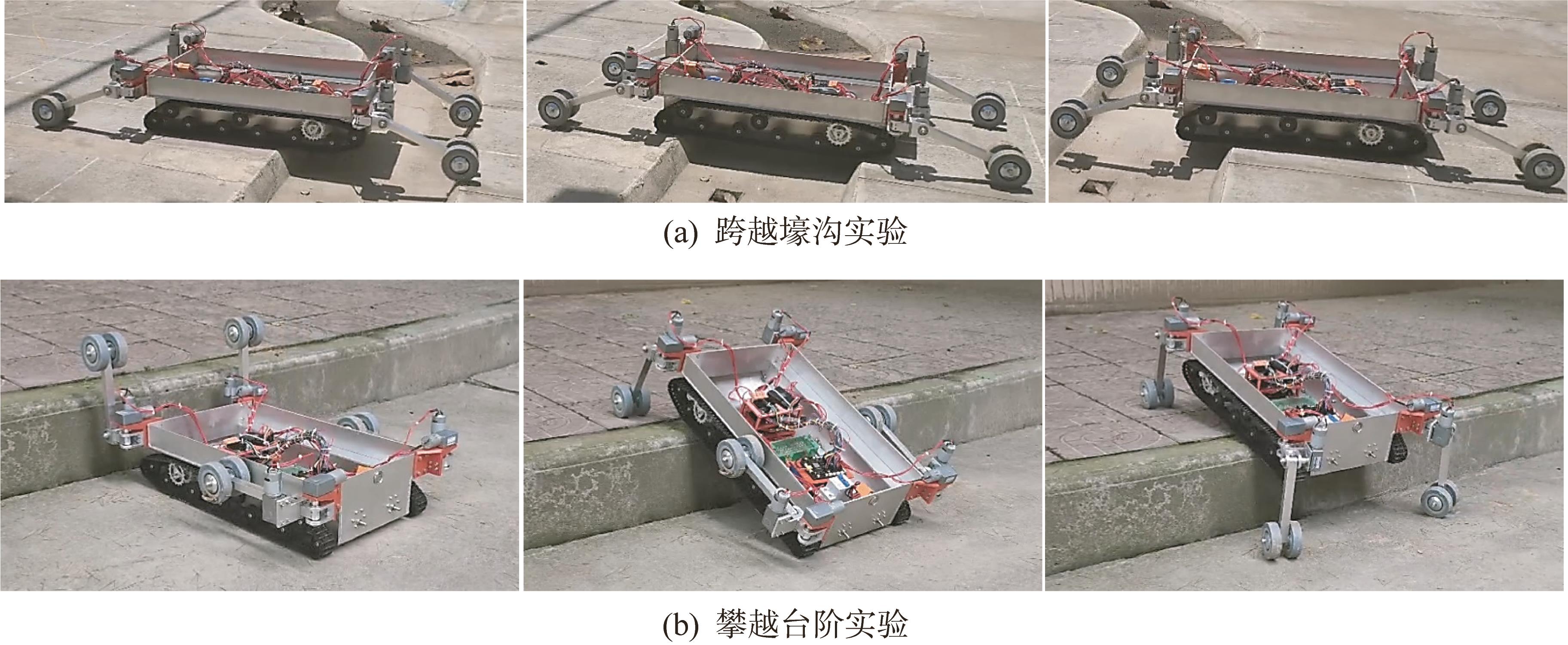
为了提高移动机器人的越障性能,实现其自主越障,设计了一种轮-履-腿复合仿生机器人,并对其进行步态规划和越障性能分析。首先,以海龟为仿生对象,通过分析其身体结构和稳定机理,设计了机器人的轮-履-腿复合式移动机构和二自由度支腿结构;同时,基于该机器人的结构特征,利用D-H(Denavit-Hartenberg)法建立了坐标系并求解了其支腿的运动学方程。然后,通过观察海龟的爬行过程,将其单个爬行步态周期内的动作分解成放腿、爬行、抬腿和摆腿,并结合运动学模型对机器人进行步态规划,提出了4种仿海龟爬行步态。接着,以机器人的四腿爬行步态为例,利用静力学方法分析了其支腿关节的受力情况,而后通过分析机器人跨越壕沟和攀越台阶的过程,以最大跨越壕沟宽度和攀越台阶高度为指标对其越障性能进行了评价。最后,制作了机器人实验样机,开展了步态实验和越障实验。实验结果表明,该机器人可以利用4种仿海龟爬行步态实现横向移动、纵向移动和原地旋转,且具有很好的越障性能和稳定性;机器人能跨越最大宽度为434 mm的壕沟,攀越最大高度为175 mm的台阶。实验结果进一步验证了所设计的仿海龟机械结构可行,所规划的仿海龟爬行步态合理,以及所建立的越障理论模型正确。研究结果可为移动机器人的结构优化和越障性能提升提供借鉴。
关键词:
仿生机器人,
越障性能,
步态规划,
运动学方程,
D-H法
|
|
| [1] |
丁良宏.BigDog四足机器人关键技术分析[J].机械工程学报,2015,51(7):1-23. doi:10.3901/JME.2015.07.001
DING Liang-hong. Key technology analysis of BigDog quadruped robot[J]. Journal of Mechanical Engineering, 2015, 51(7): 1-23.
doi: 10.3901/JME.2015.07.001
|
|
|
| [2] |
CHEN Jiu-peng, Hong-jun SAN, WU Xing, et al. Structural design and gait research of a new bionic quadruped robot[J]. Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture, 2021(5):1-11. doi:10.1177/095440542199 5663
doi: 10.1177/095440542199 5663
|
|
|
| [3] |
秦现生,张雪峰,谭小群,等.类哺乳动物腿式机器人研究综述[J].中国机械工程,2013,24(6):841-851. doi:10.3969/j.issn.1004-1322X.2013.06.027
QIN Xian-sheng, ZHANG Xue-feng, TAN Xiao-qun, et al. Mammalian legged robot: a review[J]. China Mechanical Engineering, 2013, 24(6): 841-851.
doi: 10.3969/j.issn.1004-1322X.2013.06.027
|
|
|
| [4] |
SEMINI C, TSAGARAKIS N G, GUGLIELMINO E, et al. Design of HyQ:a hydraulically and electrically actuated quadruped robot[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2011, 225(6): 831-849. doi:10.1177/0959651811402275
doi: 10.1177/0959651811402275
|
|
|
| [5] |
ZHANG Si, LIU Yi, XU Zhe, et al. Trot pattern generation for quadruped robot based on the ZMP stability margin[C]//2013 ICME International Conference on Complex Medical Engineering, Beijing, May 25-28, 2013. doi:10.1109/ICCME.2013.6548322
doi: 10.1109/ICCME.2013.6548322
|
|
|
| [6] |
朱红生,李露,唐火红,等.可实现自动翻正的仿生四足机器人的设计与分析[J].机械设计,2018,35(1):51-56. doi:10.13841/j.cnki.jxsj.2018.01.009
ZHU Hong-sheng, LI Lu, TANG Huo-hong, et al. Design and analysis of the bionic quadruped robot capable of automatic turning[J]. Journal of Machine Design, 2018, 35(1): 51-56.
doi: 10.13841/j.cnki.jxsj.2018.01.009
|
|
|
| [7] |
SORIN M O, NITULESCU M. Locomotion over common types of obstacles for a legged mobile robot[J]. IFAC Proceedings Volumes, 2012, 45(6): 918-923. doi:10.3182/20120523-3-RO-2023.00333
doi: 10.3182/20120523-3-RO-2023.00333
|
|
|
| [8] |
CHEN Shen-chiang, HUANG Ke-jung, CHEN Wei-hsi, et al. Quattroped: a leg-wheel transformable robot[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(2): 730-742. doi:10.1109/TMECH.2013.2253615
doi: 10.1109/TMECH.2013.2253615
|
|
|
| [9] |
桑董辉,陈原,高军.轮-腿复合移动机器人RUPU-RUPR球面并联腿机构动力学研究[J].农业机械学报,2017,48(8):376-383. doi:10.6041/j.issn.1000-1298.2017.08.045
SANG Dong-hui, CHEN Yuan, GAO Jun. Dynamics investigation of RUPU-RUPR spherical parallel mechanism for wheel-legged mobile robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(8): 376-383.
doi: 10.6041/j.issn.1000-1298.2017.08.045
|
|
|
| [10] |
郑明军,赵晨磊,吴文江,等.全地形移动机器人车身结构分析与优化[J].工程设计学报,2021,28(2):195-202. doi:10.3785/j.issn.1006-754X.2021.00.028
ZHENG Ming-jun, ZHAO Chen-lei, WU Wen-jiang, et al. Analysis and optimization of all-terrain mobile robot body structure[J]. Chinese Journal of Engineering Design, 2021, 28(2): 195-202.
doi: 10.3785/j.issn.1006-754X.2021.00.028
|
|
|
| [11] |
刘妤,谢铌,张拓.小型山地履带底盘设计与仿真分析[J].机械设计,2020,37(6):115-122. doi:10.13841/j.cnki.jxsj.2020.06.018
LIU Shu, XIE Ni, ZHANG Tuo. Design and simulation of small crawler chassis for mountain areas[J]. Journal of Machine Design, 2020, 37(6): 115-122.
doi: 10.13841/j.cnki.jxsj.2020.06.018
|
|
|
| [12] |
杨佳欣.绳传动四足爬行机器人的结构设计与仿真分析[D].南京:南京航空航天大学,2018:8-13.
YANG Jia-xin. Simulation and design of wire-driven quadruped crawling robot[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2018: 8-13.
|
|
|
| [13] |
韩清凯,罗忠.机械系统多体动力学分析、控制与仿真[M].北京:科学出版社,2010:8-28.
HAN Qing-kai, LUO Zhong. Multi-body dynamics analysis, control and simulation of mechanical systems[M]. Beijing: Science Press, 2010: 8-28.
|
|
|
| [14] |
阮鹏,俞志伟,张昊,等.基于ADAMS的仿壁虎机器人步态规划及仿真[J].机器人,2010,32(4):499-504,509. doi:10.3724/SP.J.1218.2010.00499
RUAN Peng, YU Zhi-wei, ZHANG Hao, et al. Gait planning and simulation of gecko inspired robot based on ADAMS[J]. Robot, 2010, 32(4): 499-504, 509.
doi: 10.3724/SP.J.1218.2010.00499
|
|
|
| [15] |
张楠,姜文通,牛宝山,等.轮腿式自动引导小车结构设计与行走步态规划[J].机械科学与技术,2021,40(2):211-217. doi:10.13433/j.cnki.1003-8728.20200047
ZHANG Nan, JIANG Wen-tong, NIU Bao-shan, et al. Structural design and walking gait planning of wheel-legged AGV[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(2): 211-217.
doi: 10.13433/j.cnki.1003-8728.20200047
|
|
|
| [16] |
孟健,李贻斌,李彬.四足机器人对角小跑步态全方位移动控制方法及其实现[J].机器人,2015,37(1):74-84. doi:10.13973/j.cnki.robot.2015.0074
MENG Jian, LI Yi-bin, LI Bin. Control method and its implementation of quadruped robot in omni-directional trotting gait[J]. Robot, 2015, 37(1): 74-84.
doi: 10.13973/j.cnki.robot.2015.0074
|
|
|
| [17] |
李允旺,葛世荣,朱华,等.四履带双摆臂机器人越障机理及越障能力[J].机器人,2010,32(2):157-165. doi:10.13973/j.cnki.robot.2010.02.007
LI Yun-wang, GE Shi-rong, ZHU Hua, et al. Obstacle-surmounting mechanism and capability of four-track robot with two swing arms[J]. Robot, 2010, 32(2): 157-165.
doi: 10.13973/j.cnki.robot.2010.02.007
|
|
|
| [18] |
吕宏宇,钱瑞明.四履带四摆臂机器人越障能力分析[J].机械设计与制造工程,2019,48(5):27-30. doi:10.3969/j. issn.2095-509X.2019.05.007
Hong-yu LÜ, QIAN Rui-ming. Obstacle ability analysis on the four-track robot with four swing arms[J]. Machine Design and Manufacturing Engineering, 2019, 48(5): 27-30.
doi: 10.3969/j. issn.2095-509X.2019.05.007
|
|
|
| [19] |
苏学满,孙丽丽,许德章.六足矿井搜救探测机器人越障动力学建模与分析[J].机械设计,2016,33(2):100-104. doi:10.13841/j.cnki.jxsj.2016.02.020
SU Xue-man, SUN Li-li, XU De-zhang. Dynamic modeling and analysis for obstacle negotiation of mine rescue detection hexapod robot[J]. Journal of Machine Design, 2016, 33(2): 100-104.
doi: 10.13841/j.cnki.jxsj.2016.02.020
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|