| Optimization Design |
|


|
|
|
| Kinematics analysis and optimization of rotary multi-legged bionic robot |
Chun-yan ZHANG1( ),Bing DING1,Zhi-qiang HE2,Jie YANG1 ),Bing DING1,Zhi-qiang HE2,Jie YANG1 |
1.School of Mechanical and Automotive Engineering, Shanghai University of Engineering Science, Shanghai 201600, China
2.Xiamen ABB Switchgear Co. , Ltd. , Xiamen 361000, China |
|
|
|
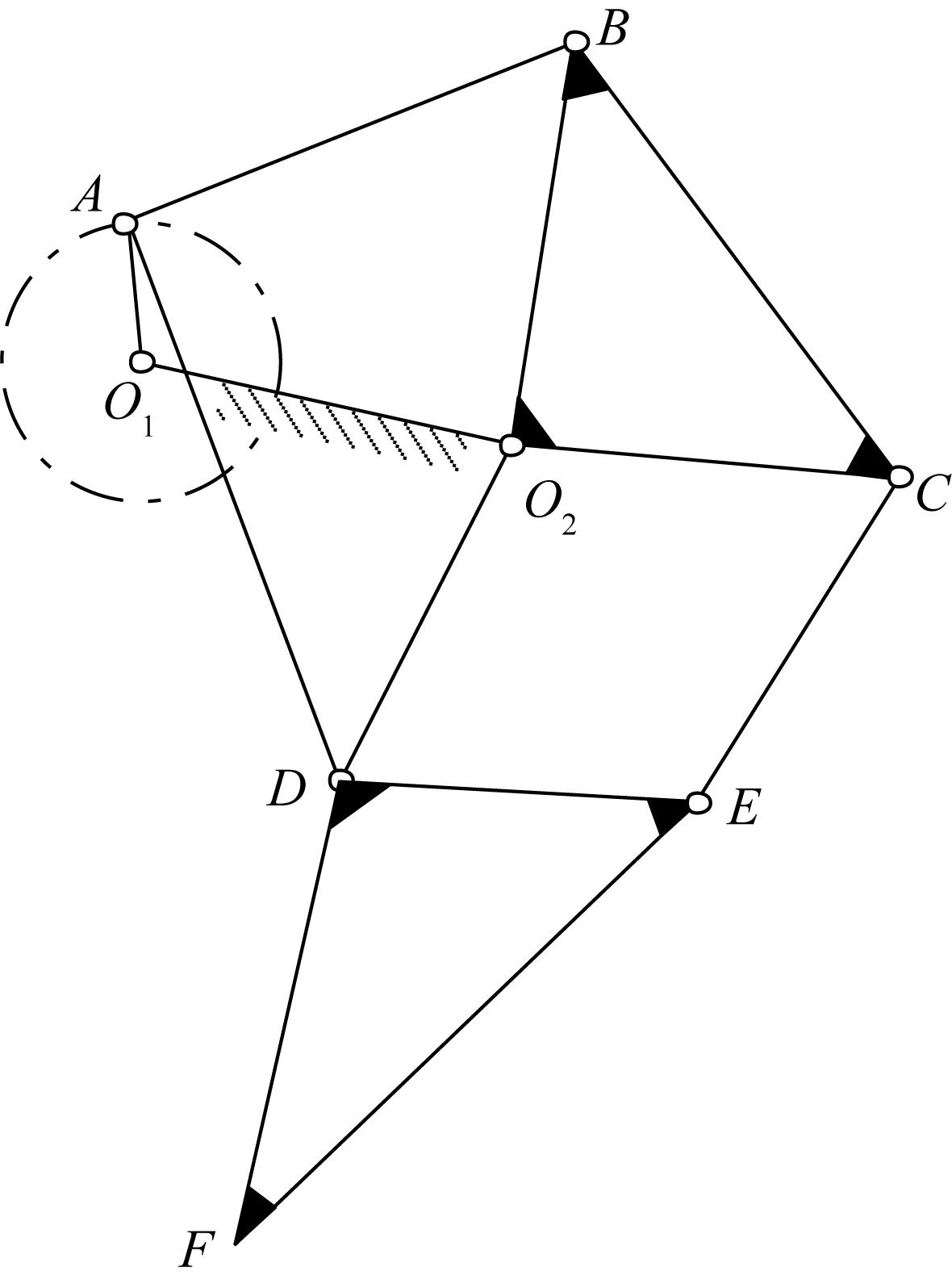
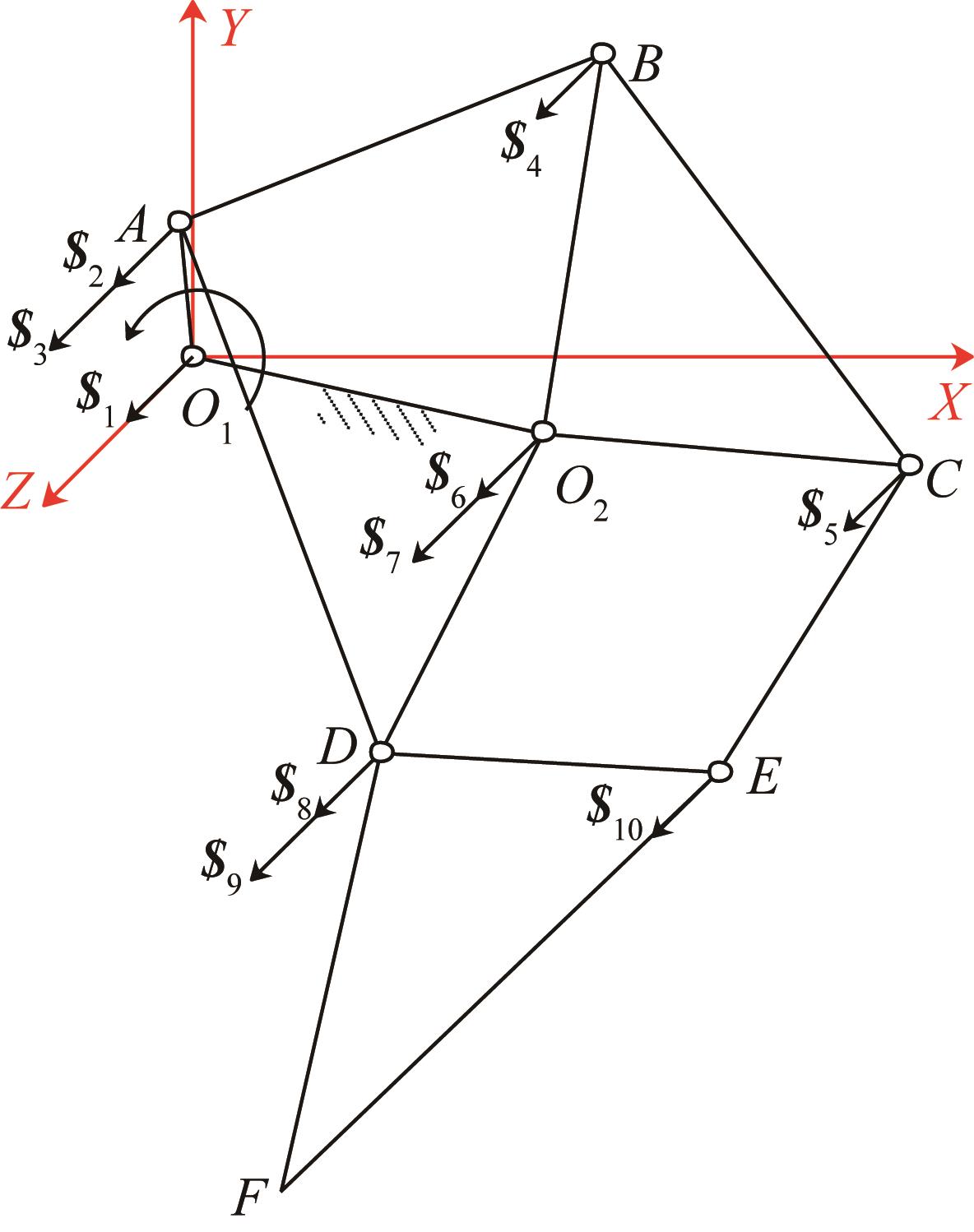
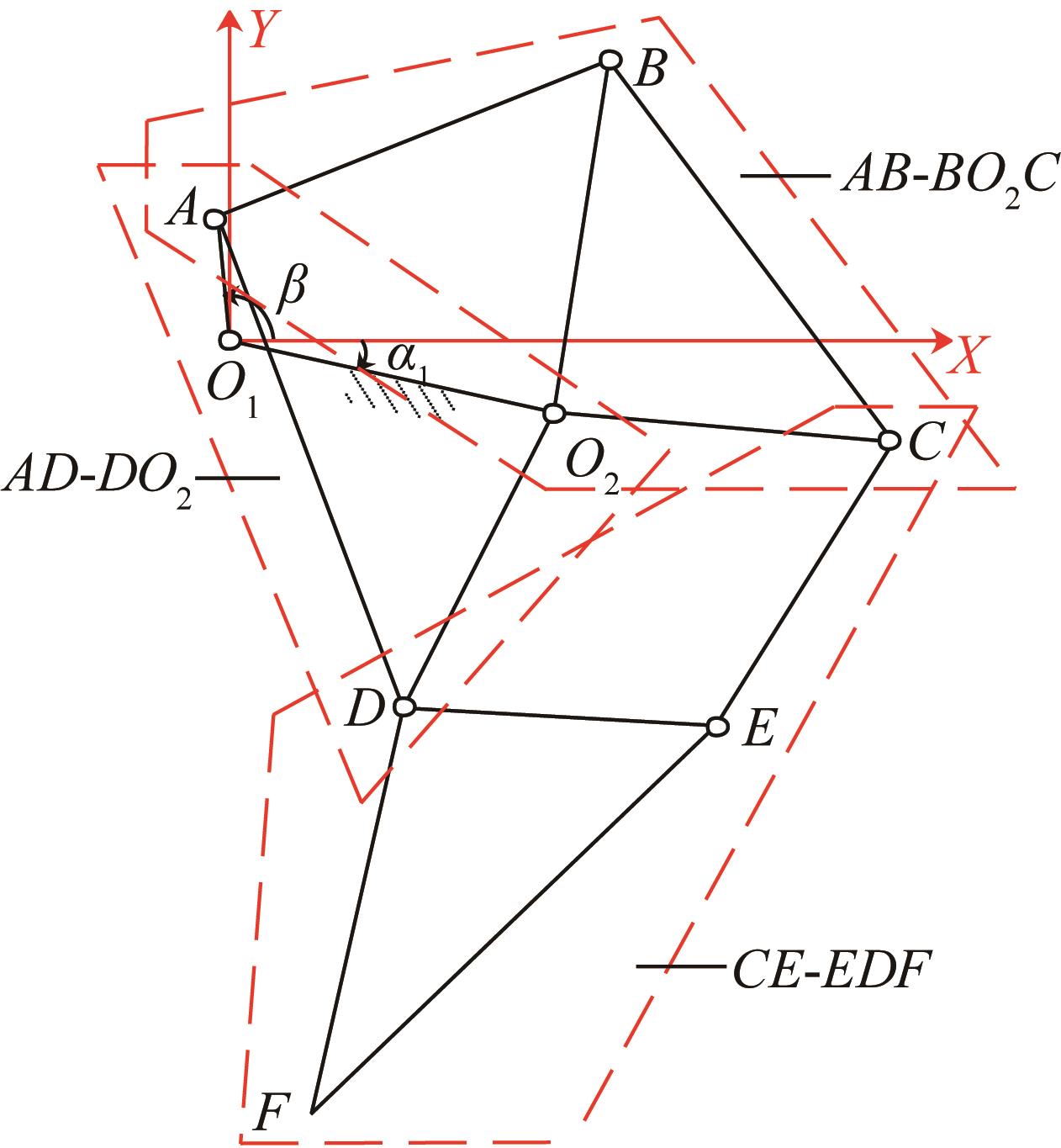
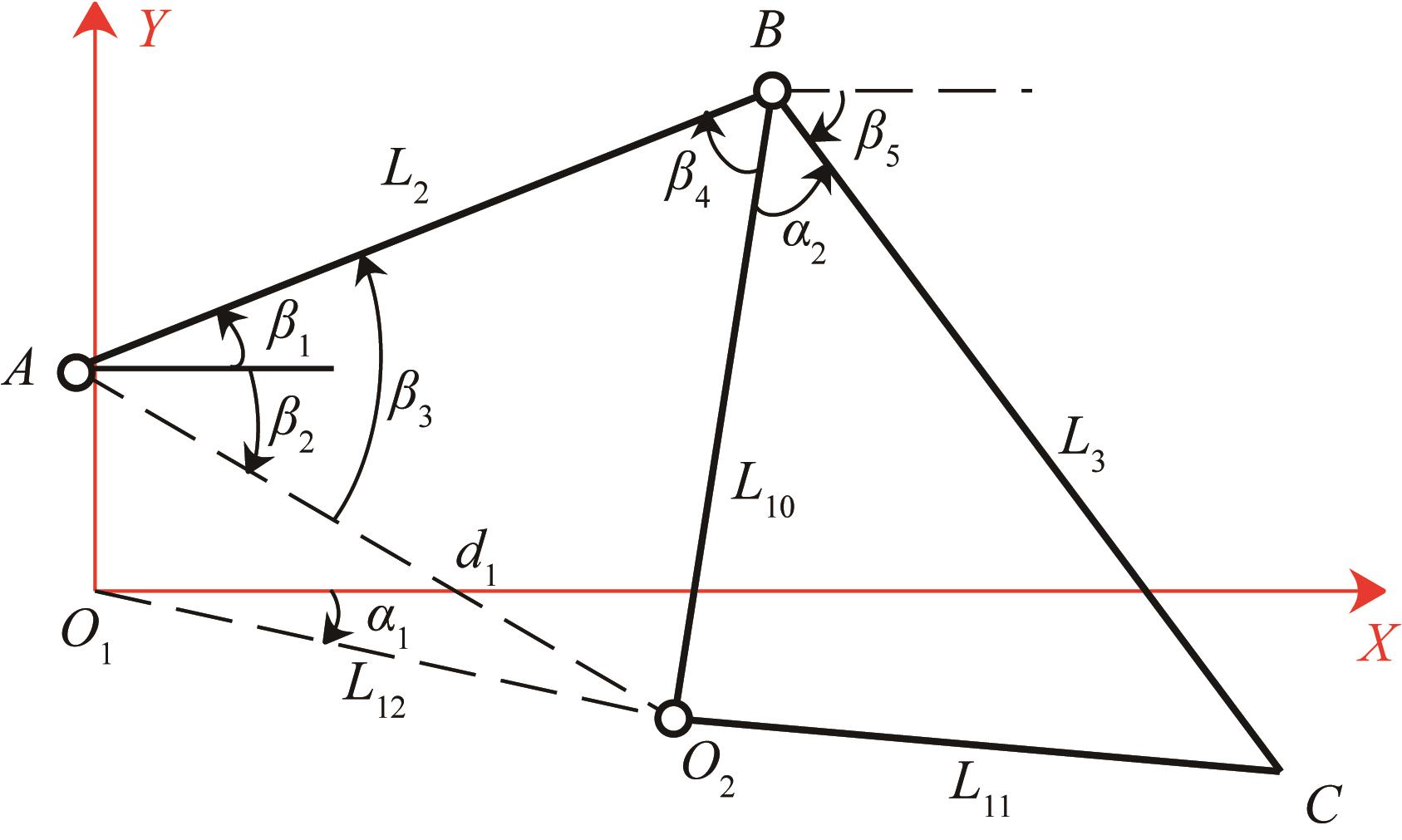
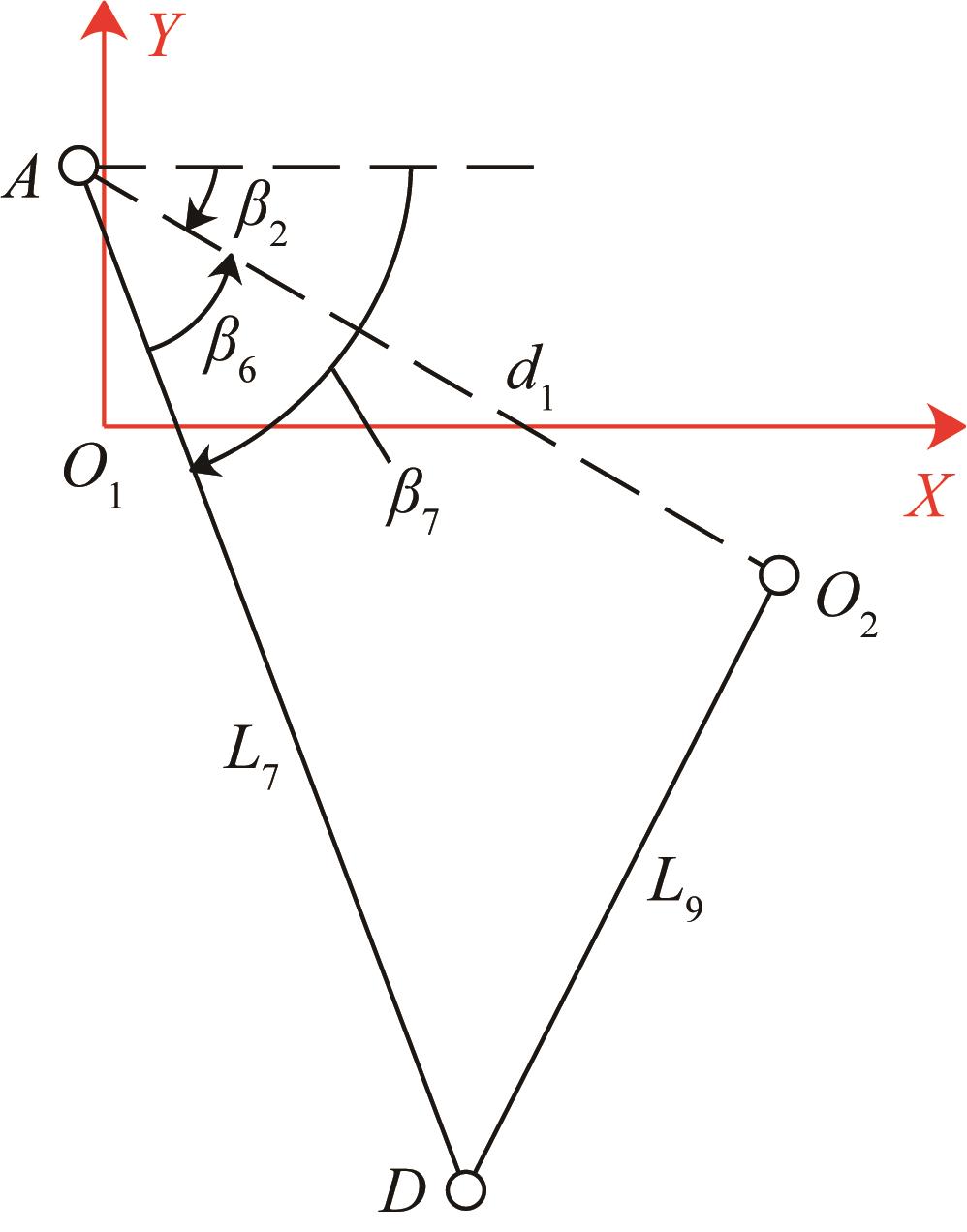
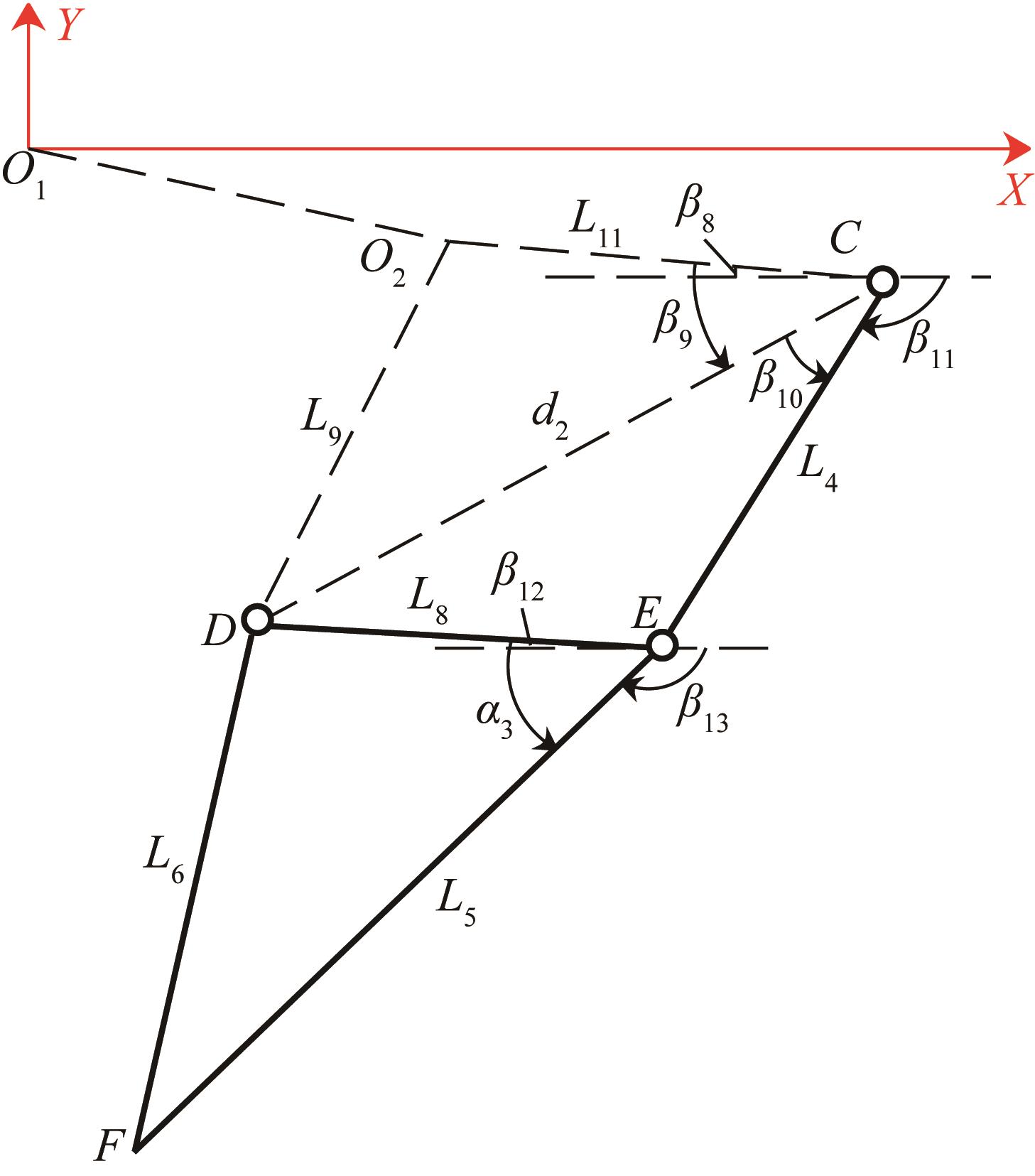
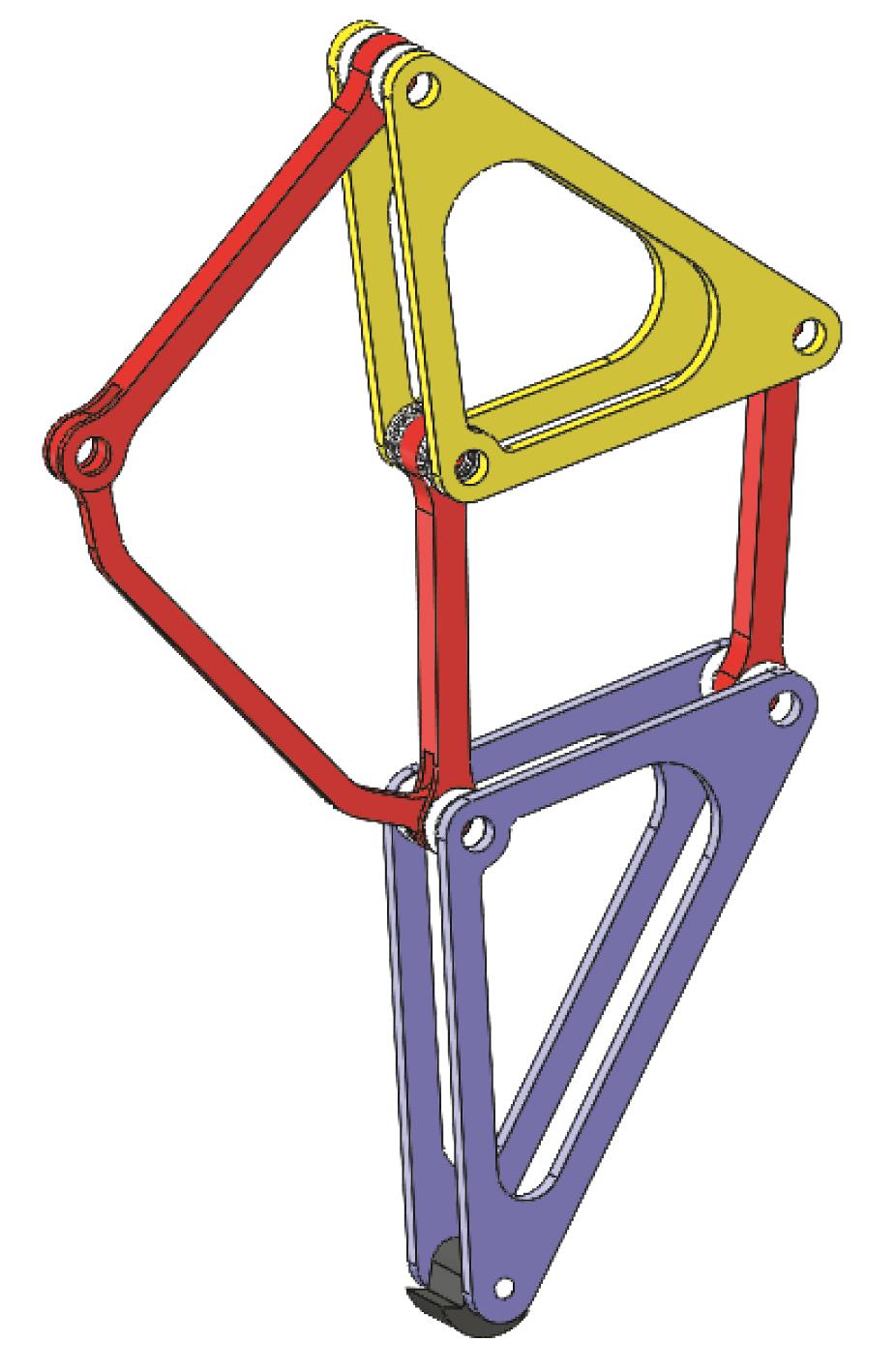
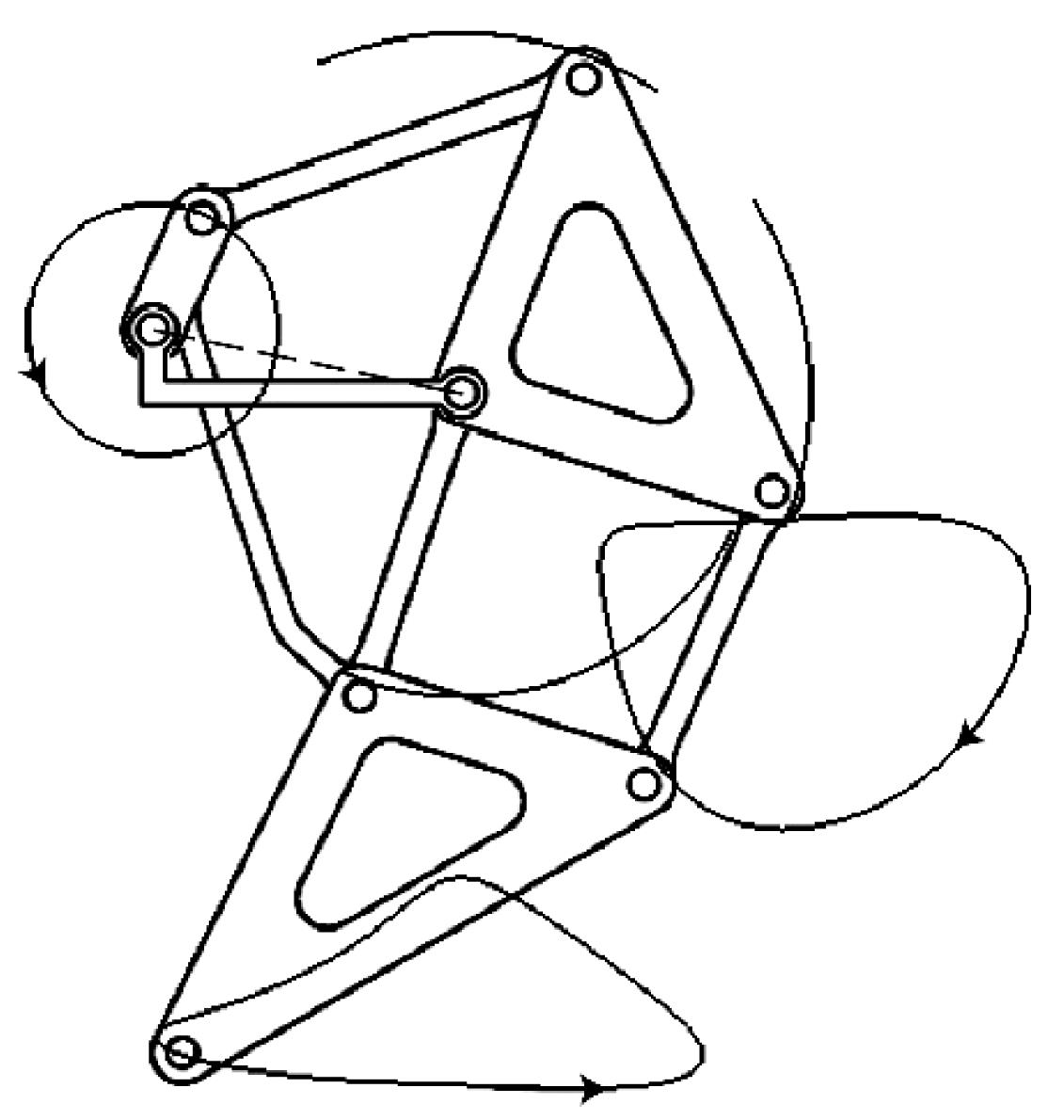
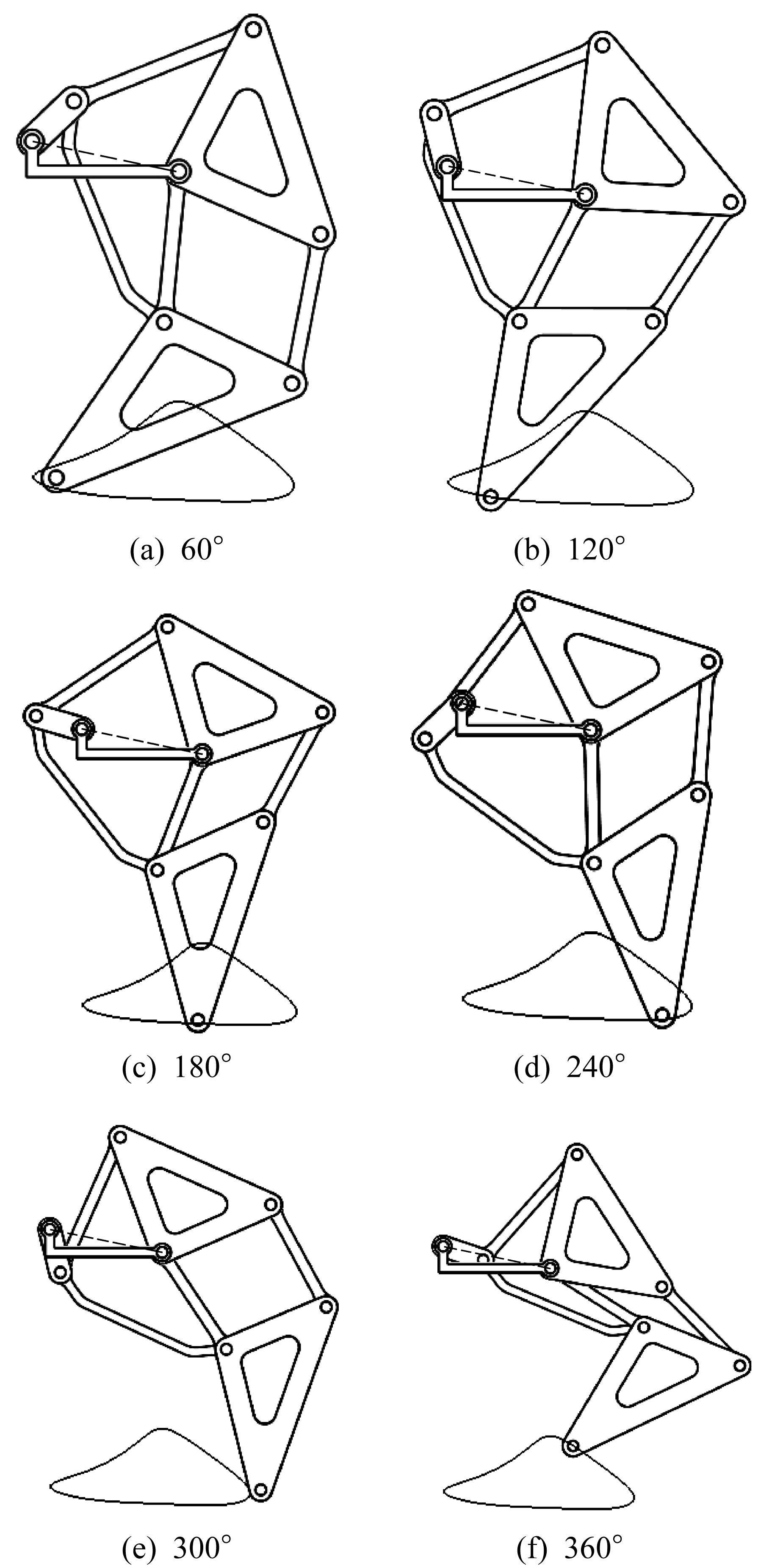
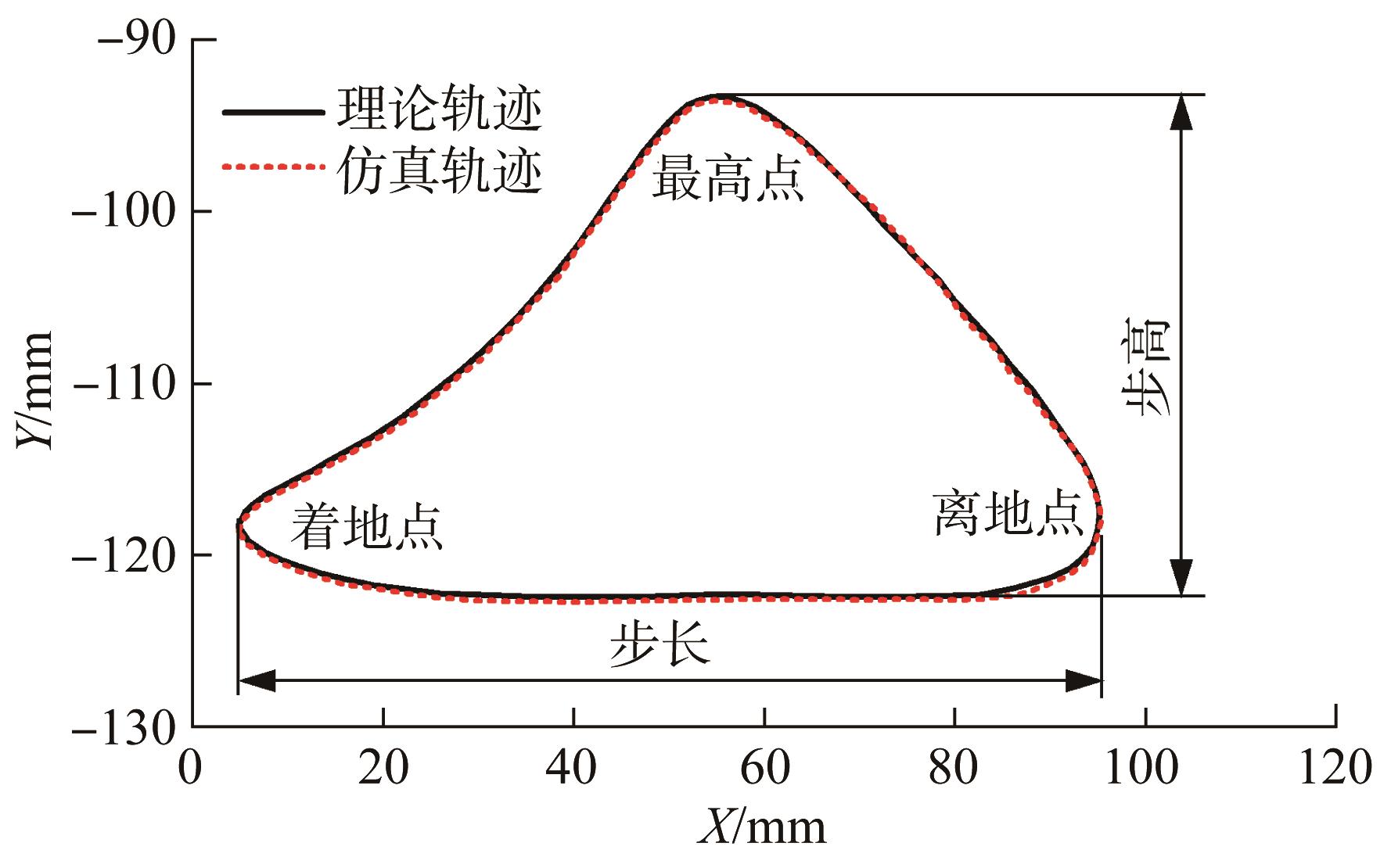
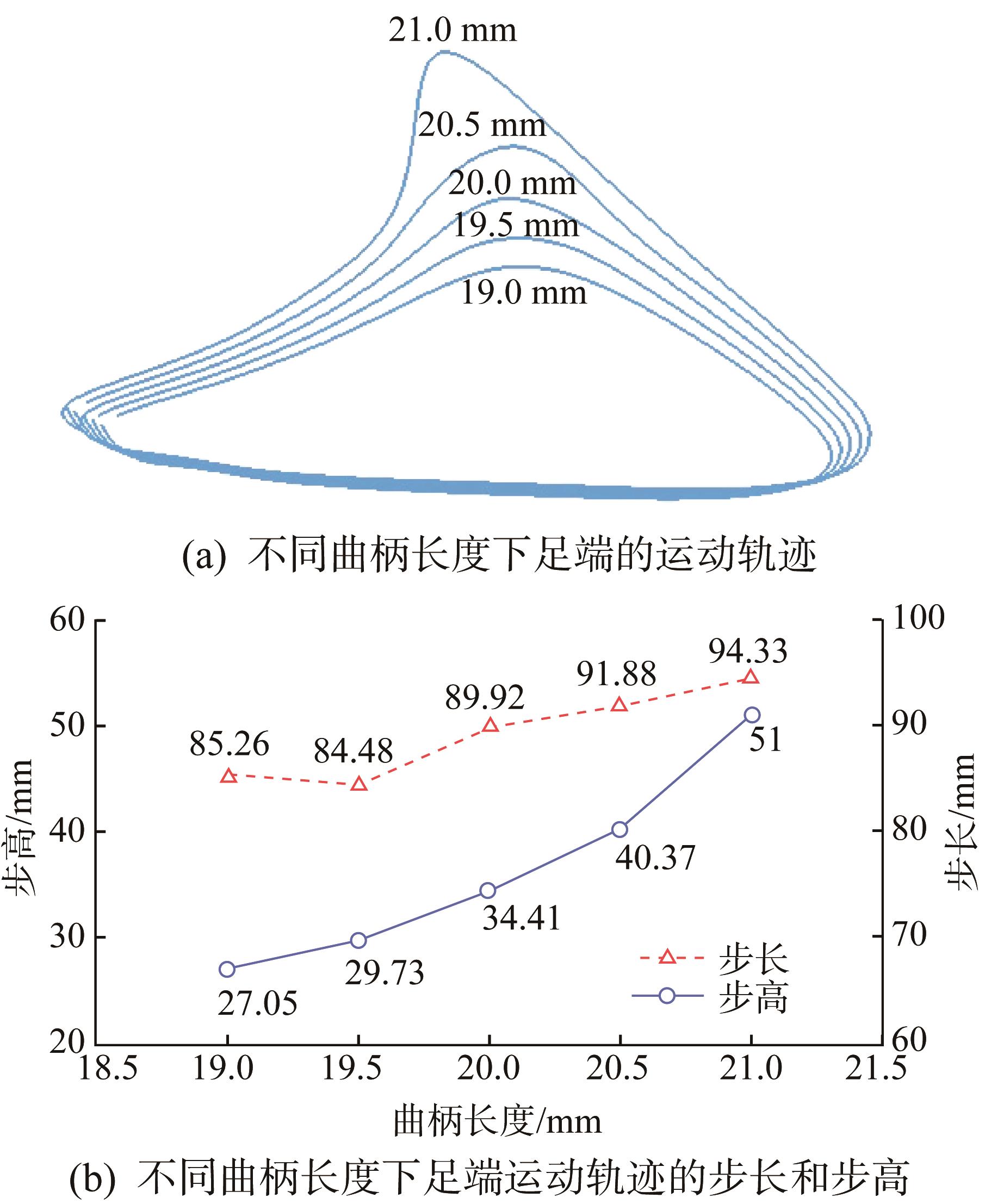
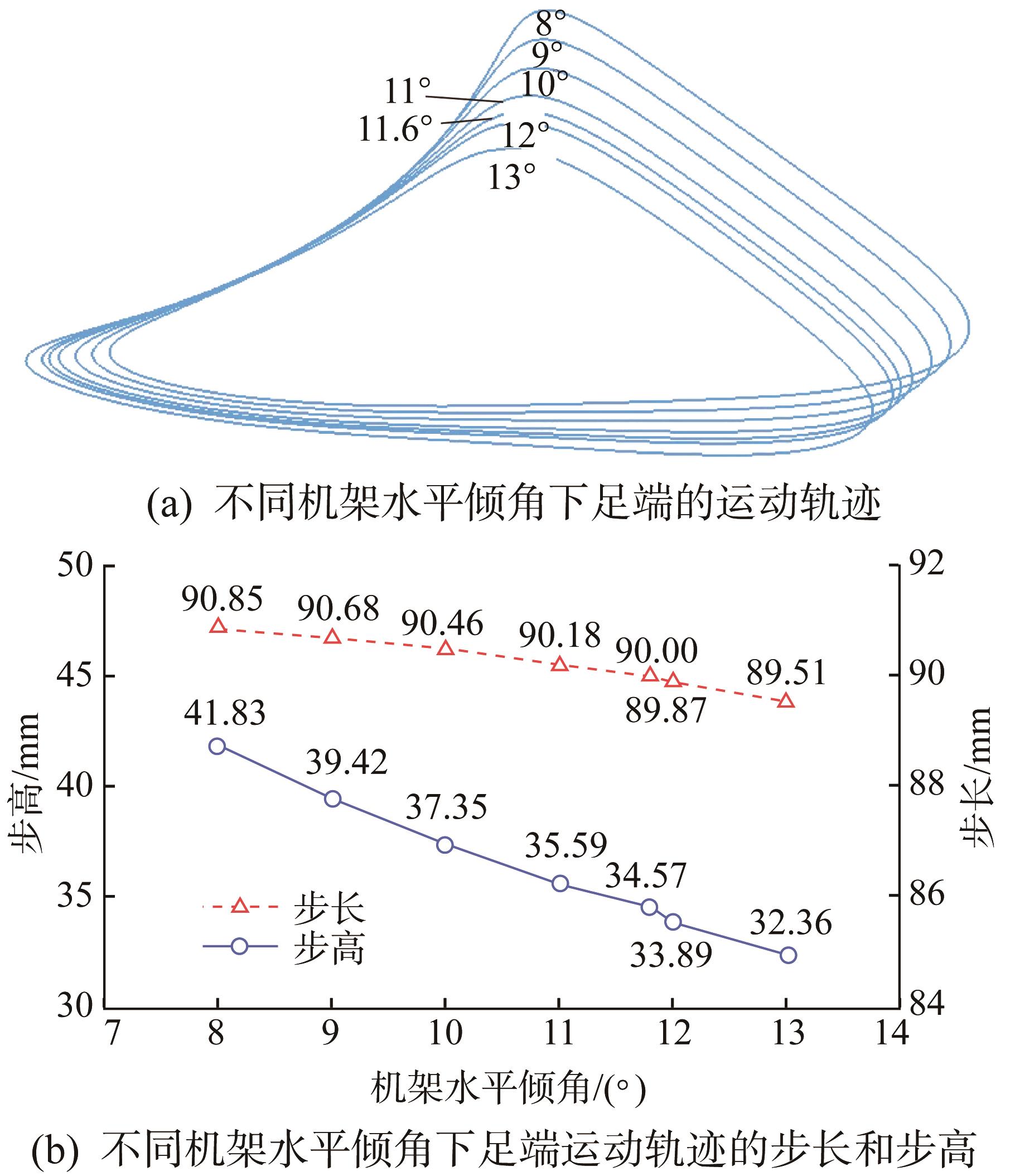
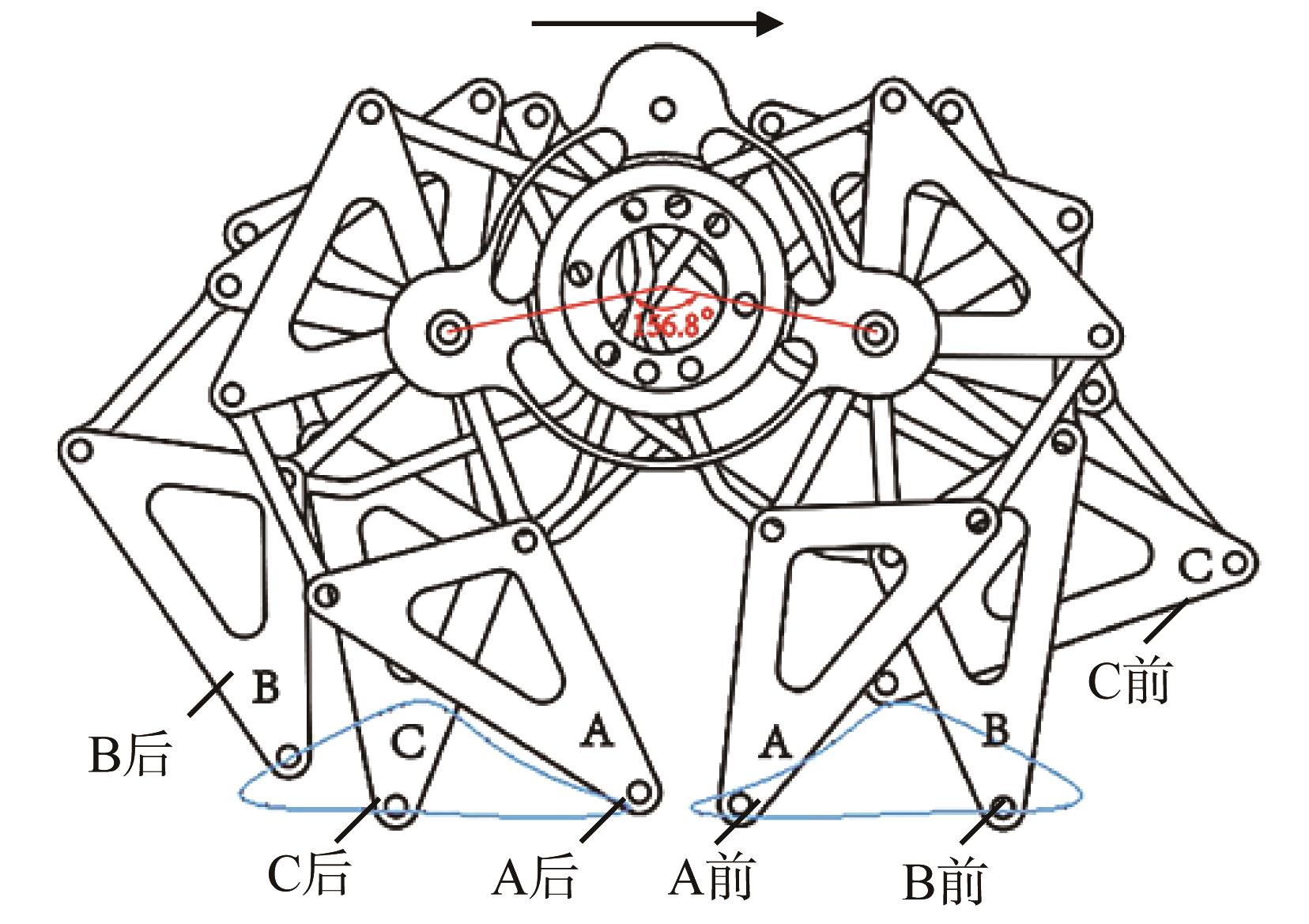
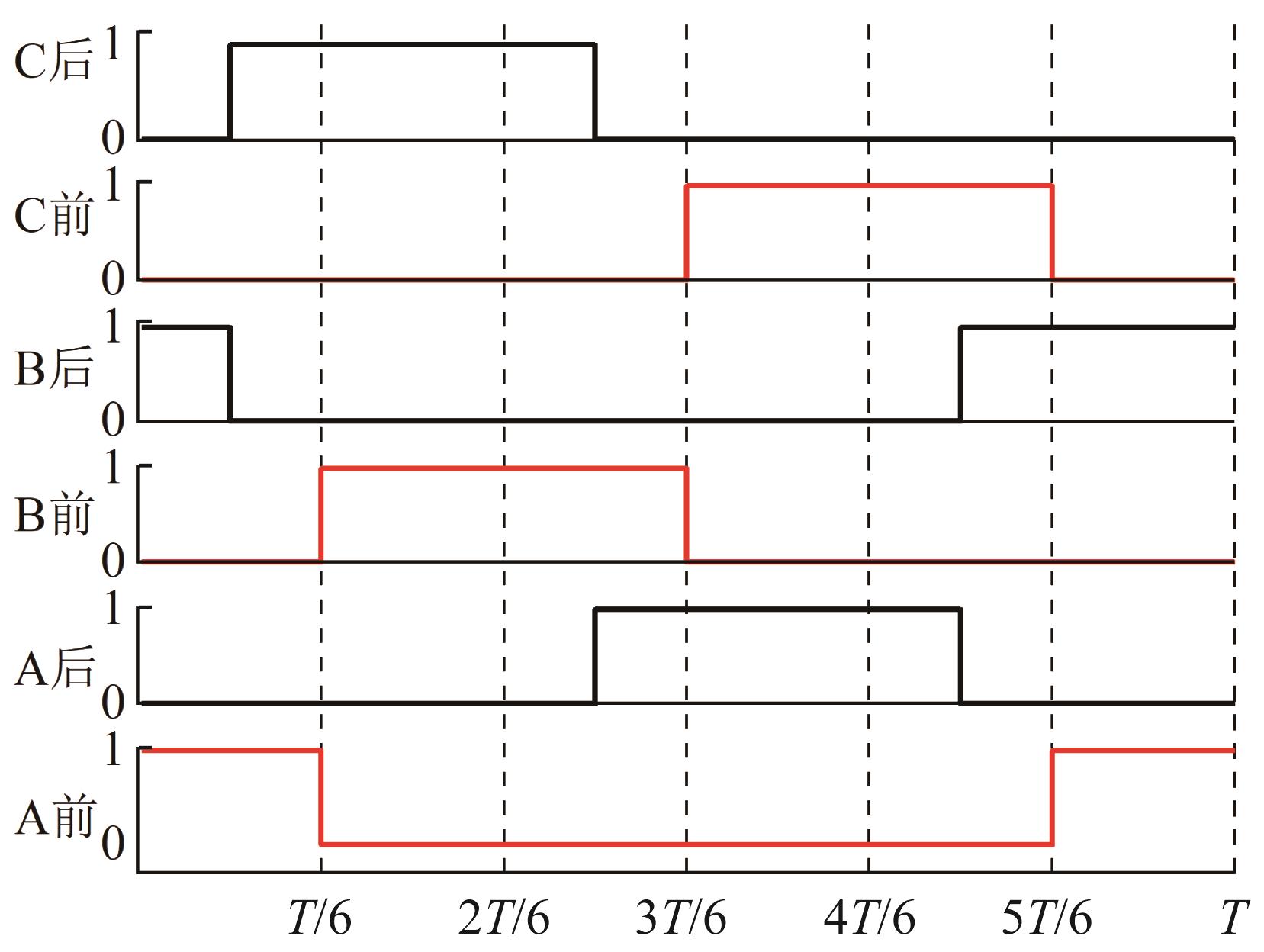
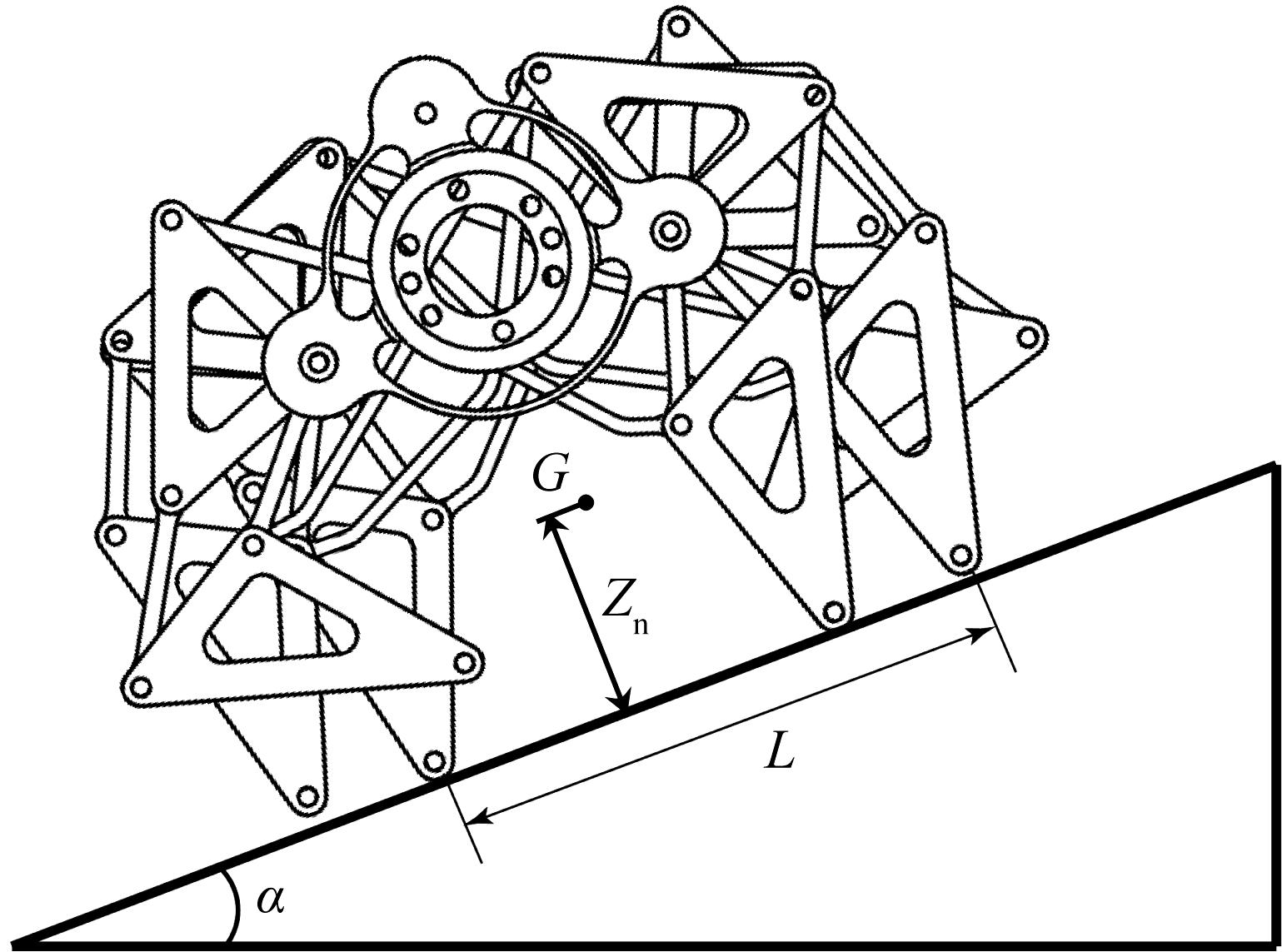
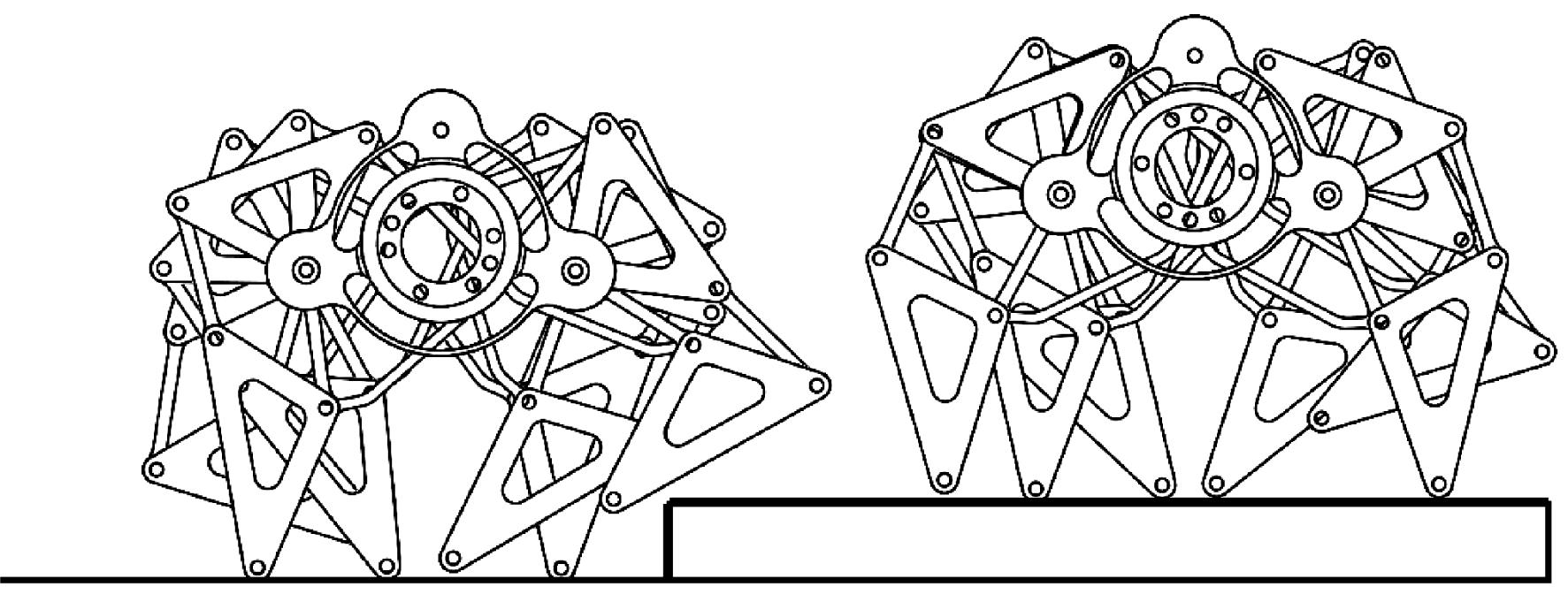
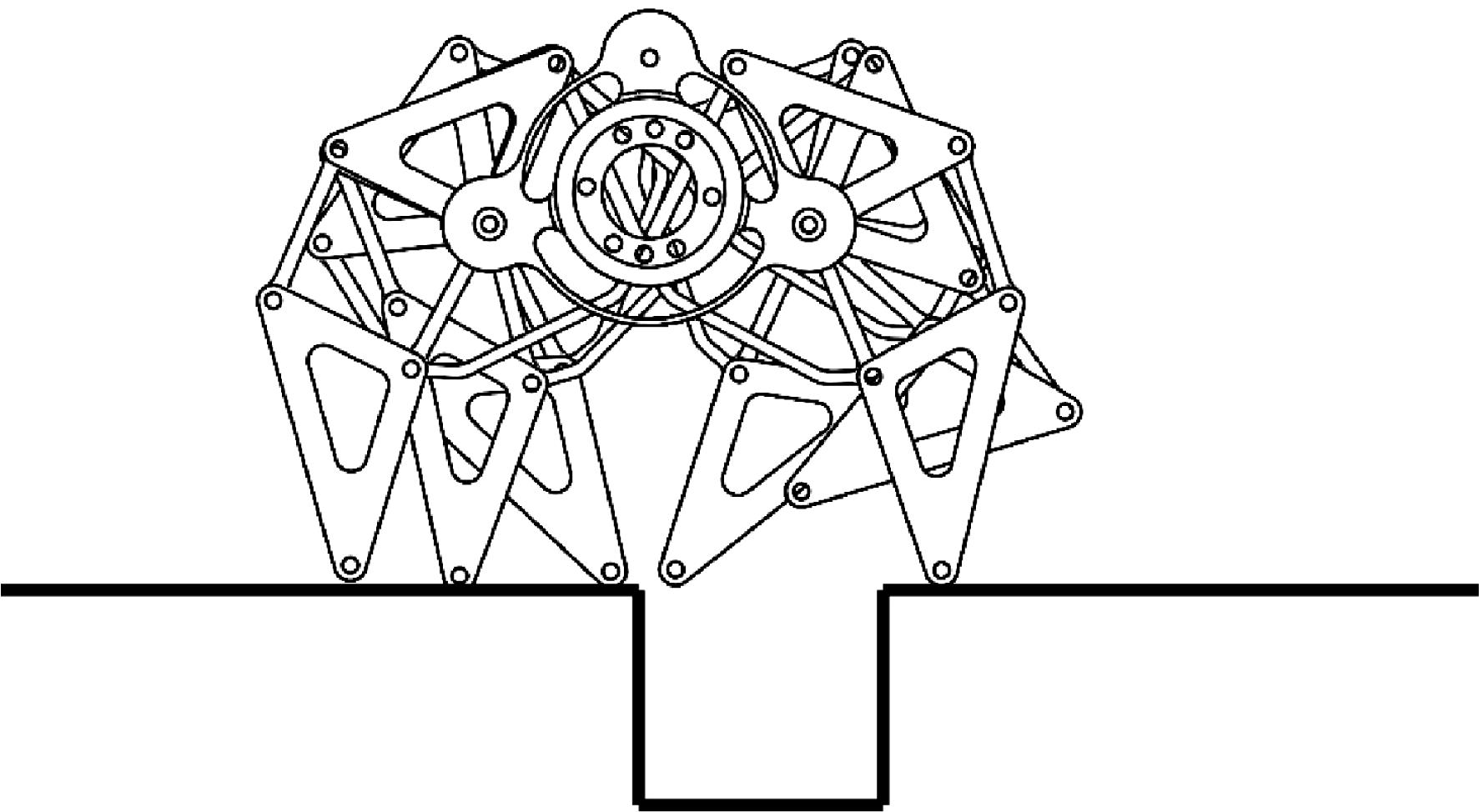
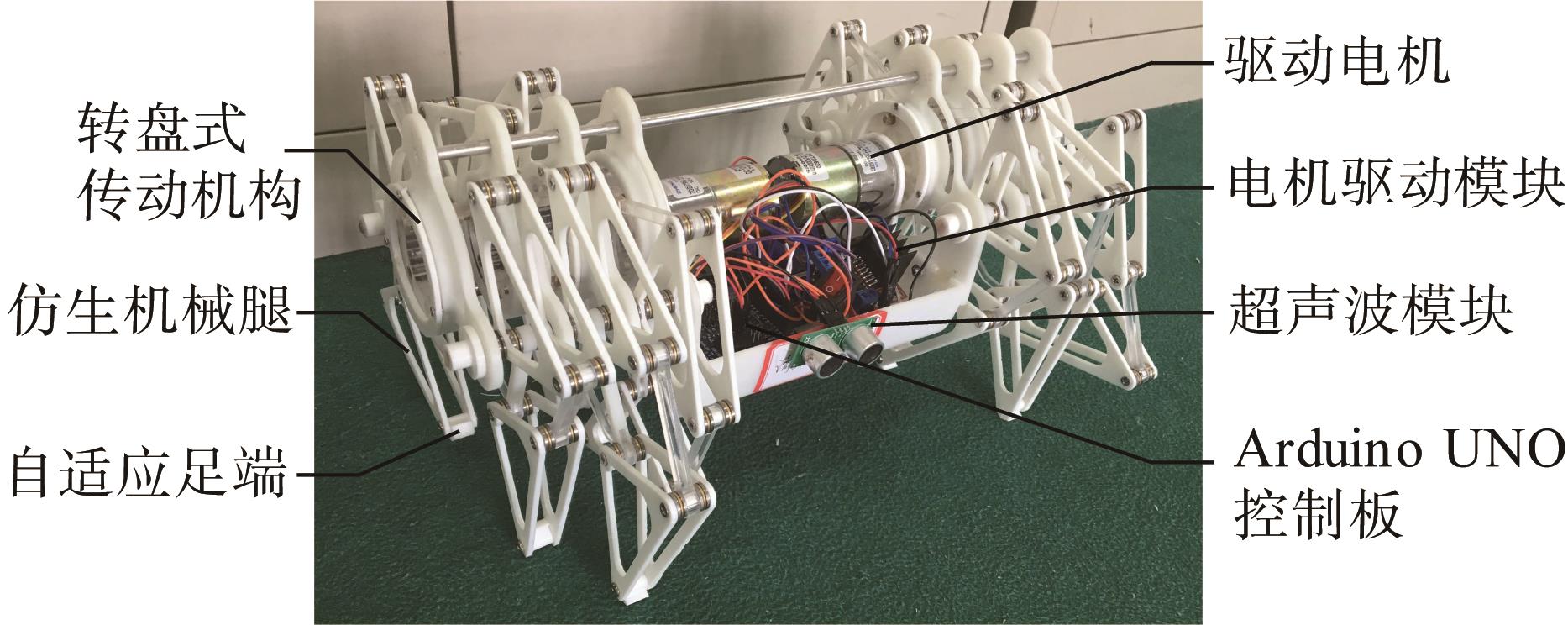
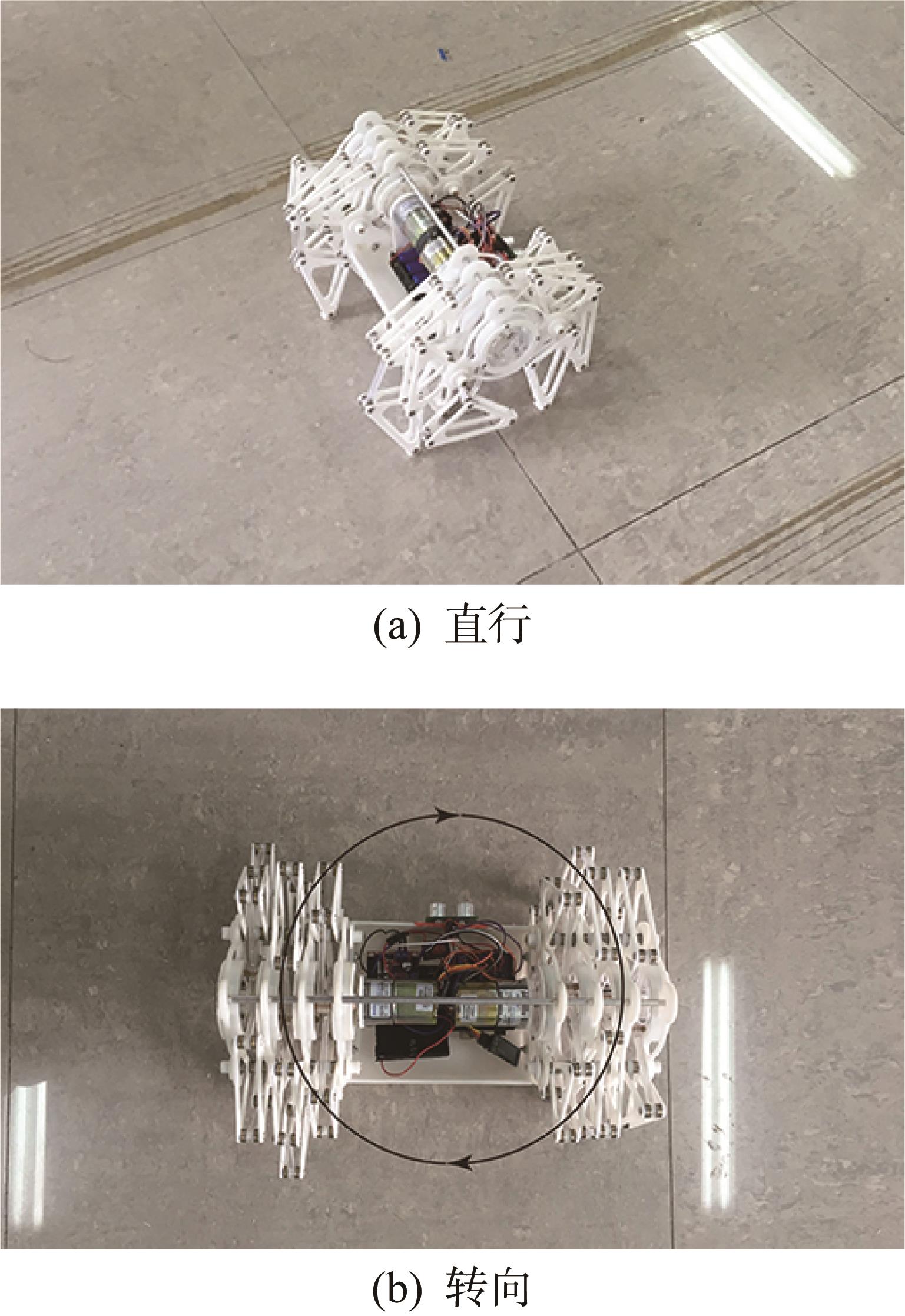
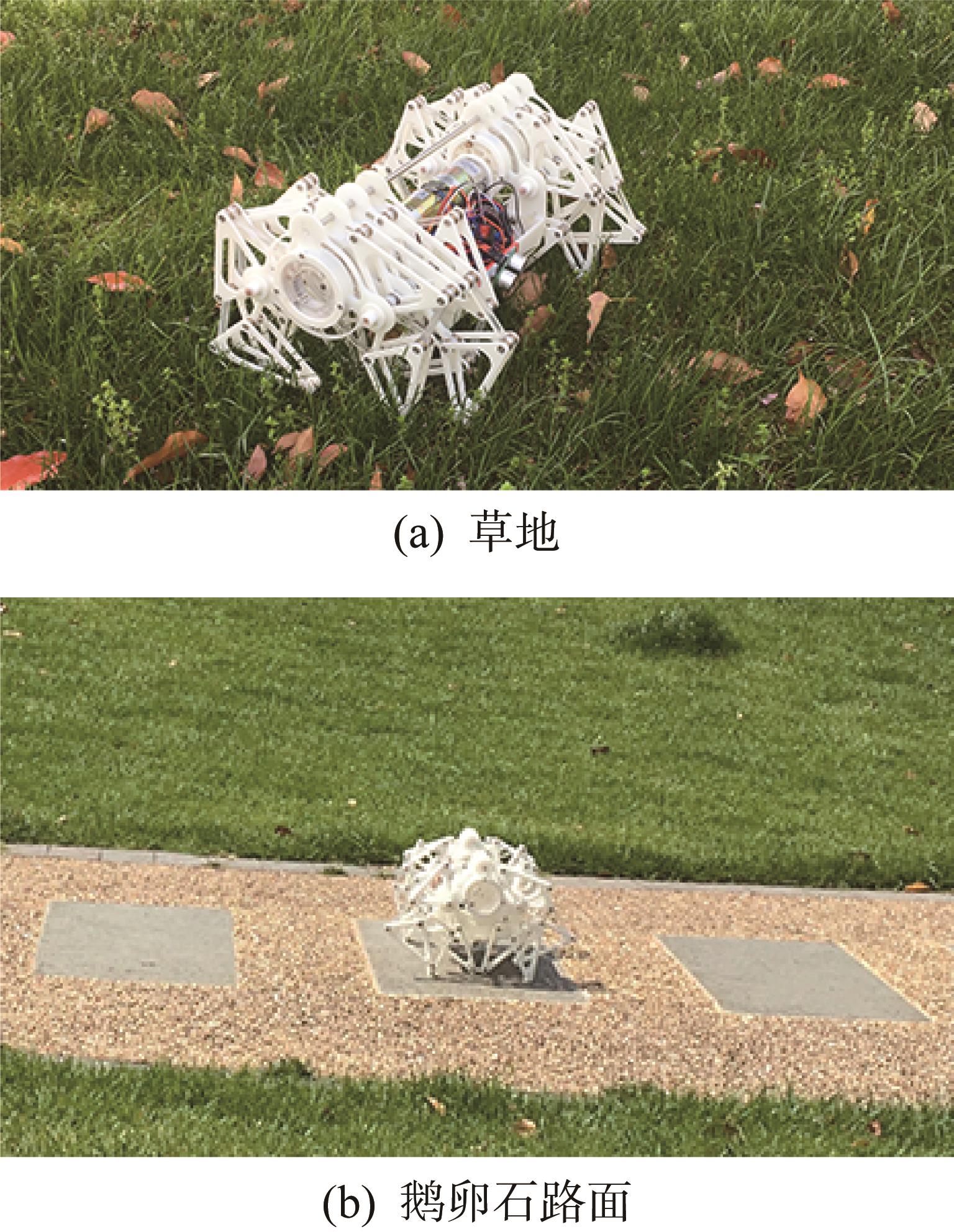
Abstract In order to solve the problems of complex control system and difficult machining and assembly of multi-legged robots, a rotary multi-legged bionic robot based on the single-degree-of-freedom Jansen linkage mechanism was designed, and its kinematics analysis and optimization were carried out. Firstly, the degree of freedom of the single bionic mechanical leg of robot was verified by the screw theory, and the kinematics of the bionic mechanical leg was solved by using the complex vector method, so as to obtain the motion trajectory equation of the foot end and the rotation angle of each joint. Then, based on the motion trajectory of the bionic mechanical leg foot end and its influencing factors, the optimization direction was analyzed. And then, a rotary transmission mechanism was proposed and the rotation joint and foot end of the bionic mechanical leg were optimized, at the same time, the gait of the rotary multi-legged bionic robot was analyzed by using the SolidWorks software. Finally, the rotary multi-legged bionic robot prototype was made and its movement ability under normal road conditions was analyzed to verify its feasibility. The results showed that changing the crank length and the horizontal inclination angle of frame could optimize the motion trajectory of the multi-legged bionic robot, which made it more suitable for practical applications; the superposition of the rotary transmission mechanism and multiple bionic mechanical legs could improve the environmental adaptability of the robot. The research results provide an important theoretical basis for the design and engineering application of the follow-up robot system.
|
|
Received: 18 August 2021
Published: 05 July 2022
|
|
|
转盘式多足仿生机器人的运动学分析及优化
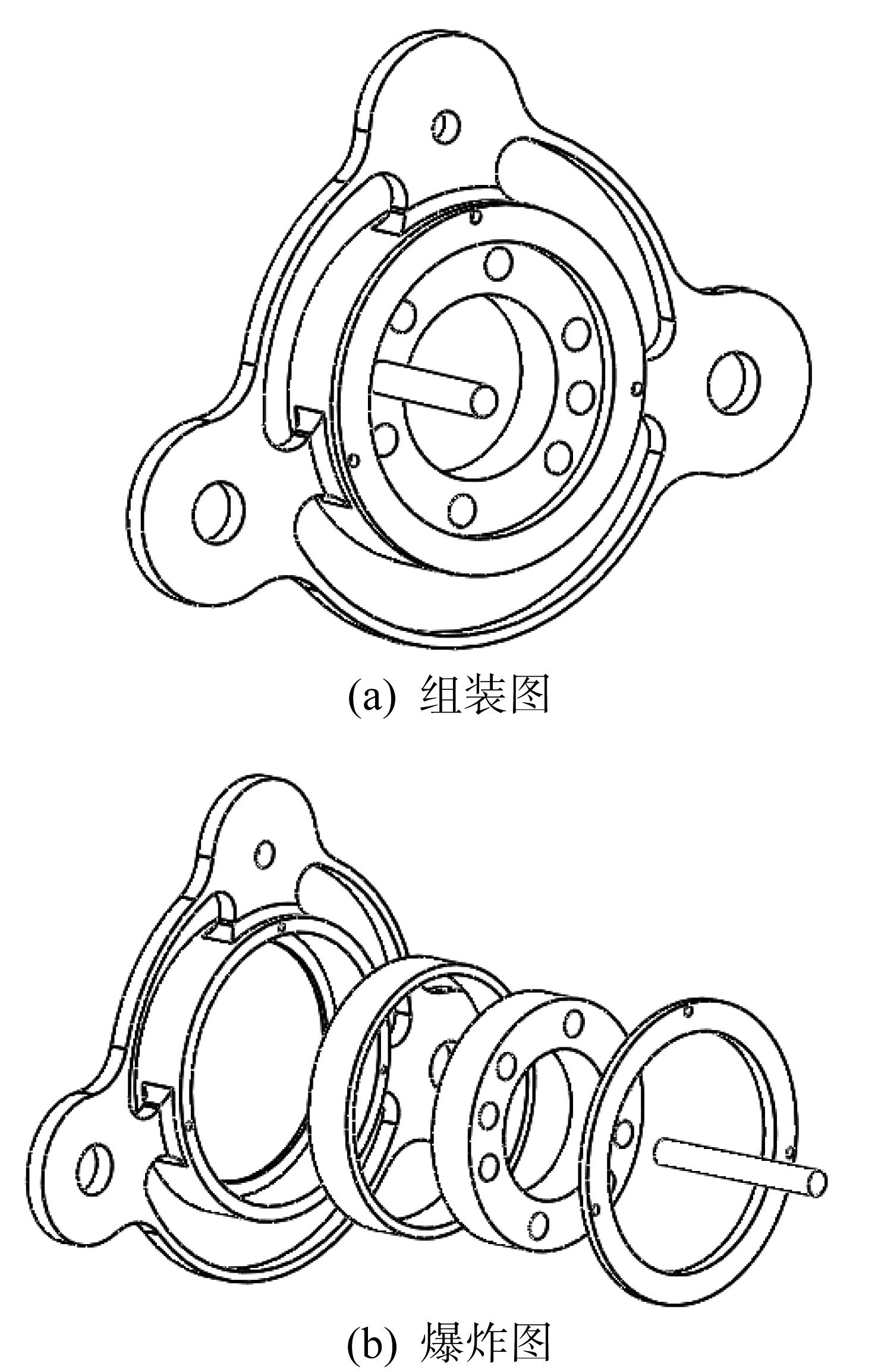
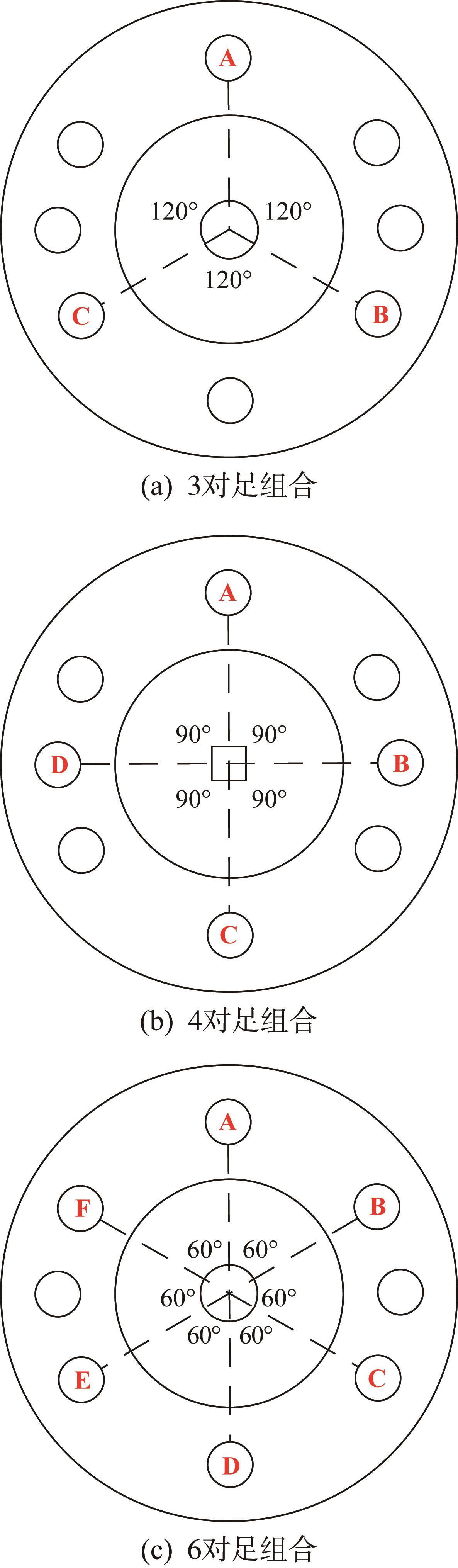
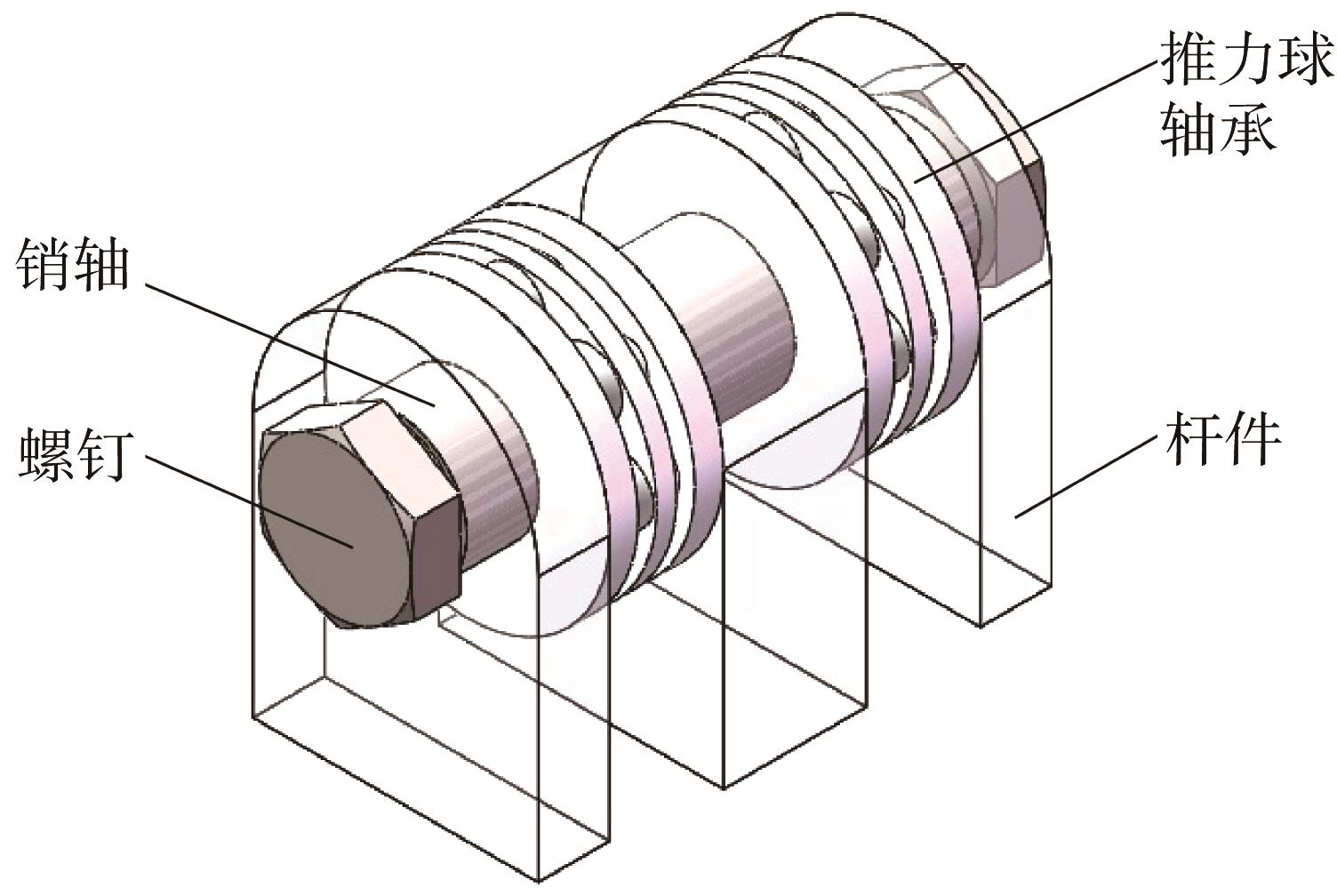
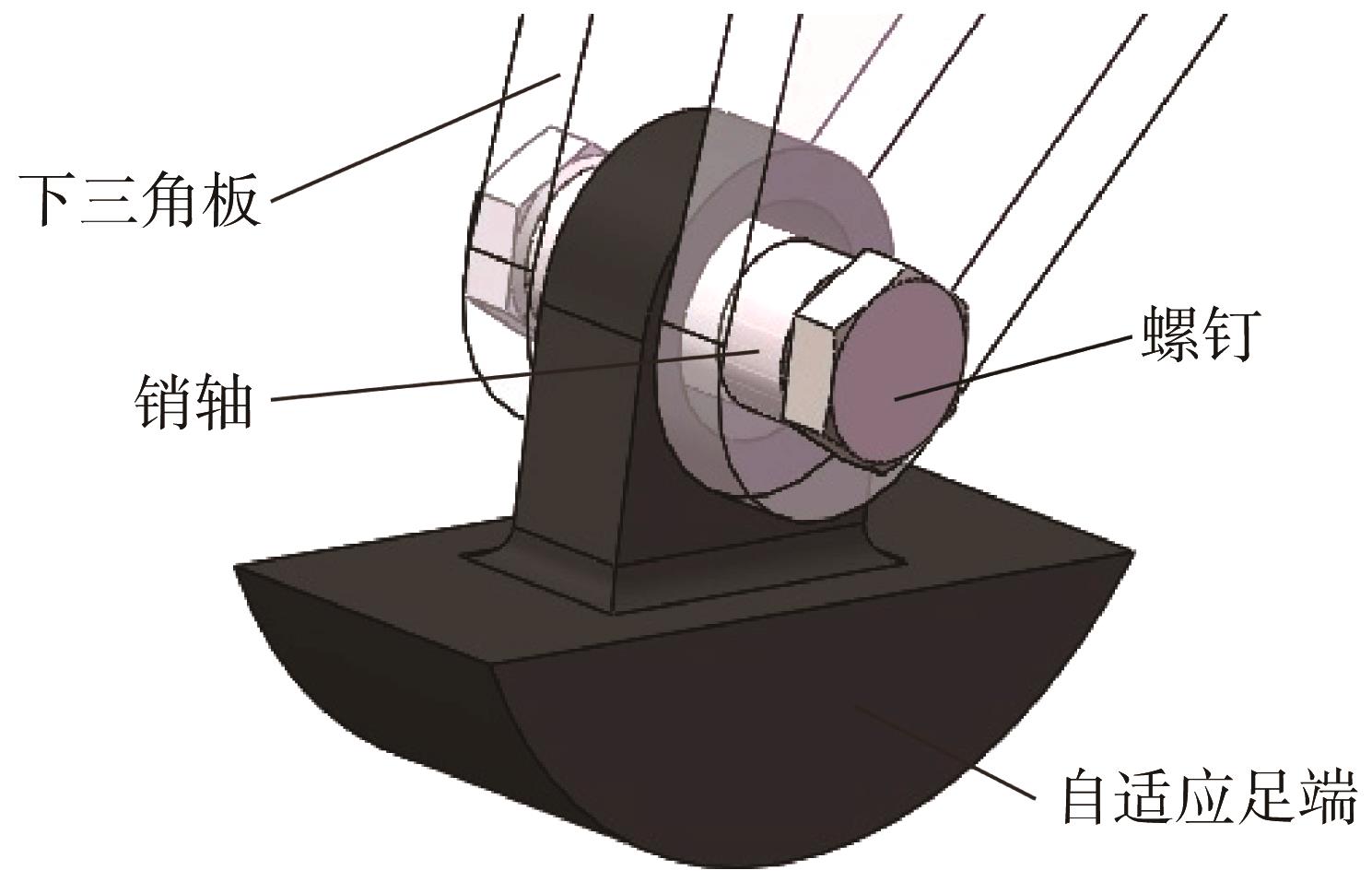
为解决多足机器人控制系统复杂、加工装配困难的问题,设计了一种基于单自由度Jansen连杆机构的转盘式多足仿生机器人,并对其进行运动学分析和优化。首先,运用旋量理论对机器人的单条仿生机械腿进行自由度验证,并运用复数矢量法对仿生机械腿进行运动学求解,得到其足端运动轨迹方程及各关节的转动角度。然后,基于仿生机械腿足端的运动轨迹及其影响因素,分析了其优化方向。接着,提出了转盘式传动机构,并对仿生机械腿的转动关节和足端进行了优化,同时利用SolidWorks软件对转盘式多足仿生机器人的步态进行了时序分析。最后,制作了转盘式多足仿生机器人样机并分析了其在常规路况下的运动能力,验证了其可行性。结果表明,改变曲柄长度和机架水平倾角可优化多足仿生机器人的运动轨迹,使其更符合实际应用所需;转盘式传动机构与多条仿生机械腿的叠加,提升了机器人的环境适应性。研究结果为后续机器人系统的设计及工程应用提供了重要的理论依据。
关键词:
多足仿生机器人,
旋量理论,
运动学分析,
步态优化,
结构优化
|
|
| [1] |
颜云辉,徐靖,陆志国,等.仿人服务机器人发展与研究现状[J].机器人,2017,39(4):551-564. doi:10.13973/j.cnki.robot.2017.0551
YAN Yun-hui, XU Jing, LU Zhi-guo, et al. Development and research status of humanoid service robots[J]. Robot, 2017, 39(4): 551-564.
doi: 10.13973/j.cnki.robot.2017.0551
|
|
|
| [2] |
臧红彬.一种新型的多足仿生机器人的机构设计与研究[J].机械设计与制造,2010(8):103-105. doi:10.3969/j.issn.1001-3997.2010.08.042
ZANG Hong-bin. A new design of bionic multilegged robot mechanical[J]. Machinery Design & Manufacture, 2010(8): 103-105.
doi: 10.3969/j.issn.1001-3997.2010.08.042
|
|
|
| [3] |
KOLTER J Z, NG A Y. The Stanford LittleDog: a learning and rapid replanning approach to quadruped locomotion[J]. International Journal of Robotics Research, 2011, 30(2): 150-174. doi:10.1177/0278364910390537
doi: 10.1177/0278364910390537
|
|
|
| [4] |
徐林森,梅涛,宦娟,等.双足机器人水上行走机理研究及推进机构设计[J].机器人,2013,35(3):257-262. doi:10.3724/SP.J.1218.2013.00257
XU Lin-sen, MEI Tao, HUAN Juan, et al. Research on dynamical mechanism and propulsion system of a biped robot walking on water[J]. Robot, 2013, 35(3): 257-262.
doi: 10.3724/SP.J.1218.2013.00257
|
|
|
| [5] |
RUBIO F, VALERO F, LLOPIS-ALBERT C. A review of mobile robots: concepts, methods, theoretical framework, and applications[J]. International Journal of Advanced Robotic Systems, 2019, 16(2): 172988141983959. doi:10.1177/1729881419839596
doi: 10.1177/1729881419839596
|
|
|
| [6] |
BISWAL P, MOHANTY P K. Development of quadruped walking robots: a review[J]. Ain Shams Engineering Journal, 2021, 12(2): 2017-2031. doi:10.1016/j.asej.2020.11.005
doi: 10.1016/j.asej.2020.11.005
|
|
|
| [7] |
JAMES P M, PRAKASH A, KALBURGI V, et al. Design, analysis, manufacturing of four-legged walking robot with insect type leg[J]. Materials Today: Proceedings, 2021, 46: 4647-4652. doi:10.1016/j.matpr.2020.10.286
doi: 10.1016/j.matpr.2020.10.286
|
|
|
| [8] |
LUNECKAS M, LUNECKAS T, UDRIS D, et al. A hybrid tactile sensor-based obstacle overcoming method for hexapod walking robots[J]. Intelligent Service Robotics, 2021, 14(1): 9-24. doi:10.1007/s11370-020-00340-9
doi: 10.1007/s11370-020-00340-9
|
|
|
| [9] |
倪聪,杨崇倡,刘香玉,等.基于Klann连杆的球腿复合机器人的设计与研究[J].机器人,2020,42(4):436-447. doi:10.13973/j.cnki.robot.190513
NI Cong, YANG Chong-chang, LIU Xiang-yu, et al. Design and research on a ball-legged compound robot based on Klann linkage[J]. Robot, 2020, 42(4): 436-447.
doi: 10.13973/j.cnki.robot.190513
|
|
|
| [10] |
RAIBERT M, BLANKESPOOR K, NELSON G, et al. BigDog, the rough-terrain quadruped robot[J]. IFAC Proceedings Volumes, 2008, 41(2): 10822-10825. doi:10.3182/20080706-5-kr-1001.01833
doi: 10.3182/20080706-5-kr-1001.01833
|
|
|
| [11] |
张秀丽.四足机器人节律运动及环境适应性的生物控制研究[D].北京:清华大学,2004:63-98.
ZHANG Xiu-li. Biological-inspired rhythmic motion & environmental adaptability for quadruped robot[D]. Beijing: Tsinghua University, 2004: 63-98.
|
|
|
| [12] |
黄博,王鹏飞,孙立宁.基于行为模式的复合运动方式四足机器人研究[J].中国机械工程,2007,18(18):2159-2162. doi:10.3321/j.issn:1004-132x.2007.18.005
HUANG Bo, WANG Peng-fei, SUN Li-ning. Research on a hybrid quadruped robot based on behaviour architecture[J]. China Mechanical Engineering, 2007, 18(18): 2159-2162.
doi: 10.3321/j.issn:1004-132x.2007.18.005
|
|
|
| [13] |
陈甫,臧希喆,闫继宏,等.适合航行的六足仿生机器人Spider的研制[J].吉林大学学报(工学版),2011,41(3):765-770.
CHEN Fu, ZANG Xi-zhe, YAN Ji-hong, et al. Development of navigable hexapod biomimetic robot Spider[J]. Journal of Jilin University (Engineering and Technology Edition), 2011, 41(3): 765-770.
|
|
|
| [14] |
PAN Yang, GAO Feng, QI Chen-kun, et al. Human tracking strategies for a six-legged rescue robot based on distance and view[J]. Chinese Journal of Mechanical Engineering, 2016, 29(2): 219-230. doi:10.3901/cjme. 2015.1212.146
doi: 10.3901/cjme. 2015.1212.146
|
|
|
| [15] |
XU Yi-lin, GAO Feng, PAN Yang, et al. Method for six-legged robot stepping on obstacles by indirect force estimation[J]. Chinese Journal of Mechanical Engineering, 2016, 29(4): 669-679. doi:10.3901/cjme.2016.0122.012
doi: 10.3901/cjme.2016.0122.012
|
|
|
| [16] |
KOMODA K, WAGATSUMA H. Energy-efficacy comparisons and multibody dynamics analyses of legged robots with different closed-loop mechanisms[J]. Multibody System Dynamics, 2017, 40(2): 123-153. doi:10.1007/s11044-016-9532-9
doi: 10.1007/s11044-016-9532-9
|
|
|
| [17] |
NANSAI S, ELARA M R, IWASE M. Dynamic analysis and modeling of Jansen mechanism[J]. Procedia Engineering, 2013, 64: 1562-1571. doi:10.1016/j.proeng. 2013.09.238
doi: 10.1016/j.proeng. 2013.09.238
|
|
|
| [18] |
PATNAIK L, UMANAND L. Kinematics and dynamics of Jansen leg mechanism: a bond graph approach[J]. Simulation Modelling Practice and Theory, 2016, 60: 160-169. doi:10.1016/j.simpat.2015.10.003
doi: 10.1016/j.simpat.2015.10.003
|
|
|
| [19] |
黄真,赵永生,赵铁石.高等空间机构学[M].2版.北京:高等教育出版社,2014:28-87.
HUANG Zhen, ZHAO Yong-sheng, ZHAO Tie-shi. Advanced spatial mechanism[M]. 2nd ed. Beijing: Higher Education Press, 2014: 28-87.
|
|
|
| [20] |
韩建友,杨通,尹来容,等.连杆机构现代综合理论与方法[M].北京:高等教育出版社,2013:36-90.
HAN Jian-you, YANG Tong, YIN Lai-rong, et al. Modern comprehensive theory and method of linkage mechanism[M]. Beijing: Higher Education Press, 2013: 36-90.
|
|
|
| [21] |
柏龙,龙樟,陈晓红,等.连续电驱动四足机器人腿部机构设计与分析[J].机器人,2018,40(2):136-145. doi:10.13973/j.cnki.robot.170443
BAI Long, LONG Zhang, CHEN Xiao-hong, et al. Design and analysis of a leg mechanism for a continuous electrically-driven quadruped robot[J]. Robot, 2018, 40(2): 136-145.
doi: 10.13973/j.cnki.robot.170443
|
|
|
| [22] |
陈耀,周建军,胡涛.单自由度腿部机构的四足机器人稳定性研究[J].机械与电子,2015(2):65-69. doi:10.3969/j.issn.1001-2257.2015.02.018
CHEN Yao, ZHOU Jian-jun, HU Tao. Stability analysis of a 1-DOF leg for quadruped robot[J]. Machinery & Electronics, 2015(2): 65-69.
doi: 10.3969/j.issn.1001-2257.2015.02.018
|
|
|
| [23] |
NANSAI S, ROJAS N, ELARA M R, et al. A novel approach to gait synchronization and transition for reconfigurable walking platforms[J]. Digital Communications and Networks, 2015, 1(2): 141-151. doi:10.1016/j.dcan. 2015.04.003
doi: 10.1016/j.dcan. 2015.04.003
|
|
|
| [24] |
ERDEN M S, LEBLEBICIOGLU K. Free gait generation with reinforcement learning for a six-legged robot[J]. Robotics and Autonomous System, 2008, 56(3): 199-212. doi:10.1016/j.robot.2007.08.001
doi: 10.1016/j.robot.2007.08.001
|
|
|
| [25] |
IJSPEERT A J. Biorobotics: using robots to emulate and investigate agile locomotion[J]. Science, 2014, 346(6206): 196-203. doi:10.1126/science.1254486
doi: 10.1126/science.1254486
|
|
|
| [26] |
李奇敏,任灏宇,蒲文东,等.具有弹性连杆机构的四足机器人对角小跑步态控制[J].机器人,2019,41(2):197-205. doi:10.13973/j.cnki.robot.180185
LI Qi-min, REN Hao-yu, PU Wen-dong, et al. Trotting gait control of the quadruped robot with an elastic linkage[J]. Robot, 2019, 41(2): 197-205.
doi: 10.13973/j.cnki.robot.180185
|
|
|
| [27] |
徐蔚青,严惠,张吴晖.基于Klann机构的多足连杆步行机器人的仿真优化[J].机械设计,2018,35(5):25-29. doi:10.13841/j.cnki.jxsj.2018.05.005
XU Wei-qing, YAN Hui, ZHANG Wu-hui. Simulation-based optimization on multi-legged walking robot based on Klann mechanism[J]. Journal of Machine Design, 2018, 35(5): 25-29.
doi: 10.13841/j.cnki.jxsj.2018.05.005
|
|
|
| [28] |
臧红彬,沈连婠.Theo Jansen仿生腿研究及其机构优化设计[J].机械工程学报,2017,53(15):101-109. doi:10.3901/JME.2017.15.101
ZANG Hong-bin, SHEN Lian-wan. Research and optimization design of mechanism for Theo Jansen bionic leg[J]. Journal of Mechanical Engineering, 2017, 53(15): 101-109.
doi: 10.3901/JME.2017.15.101
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|