| Robotic and Mechanism Design |
|


|
|
|
| Design of soft pipeline robot based on Kresling origami structure |
Weitao HAN( ),Tao WEN,Lei LIU,Junfeng HU() ),Tao WEN,Lei LIU,Junfeng HU() |
| School of Mechanical and Electrical Engineering, Jiangxi University of Science and Technology, Ganzhou 341000, China |
|
|
|
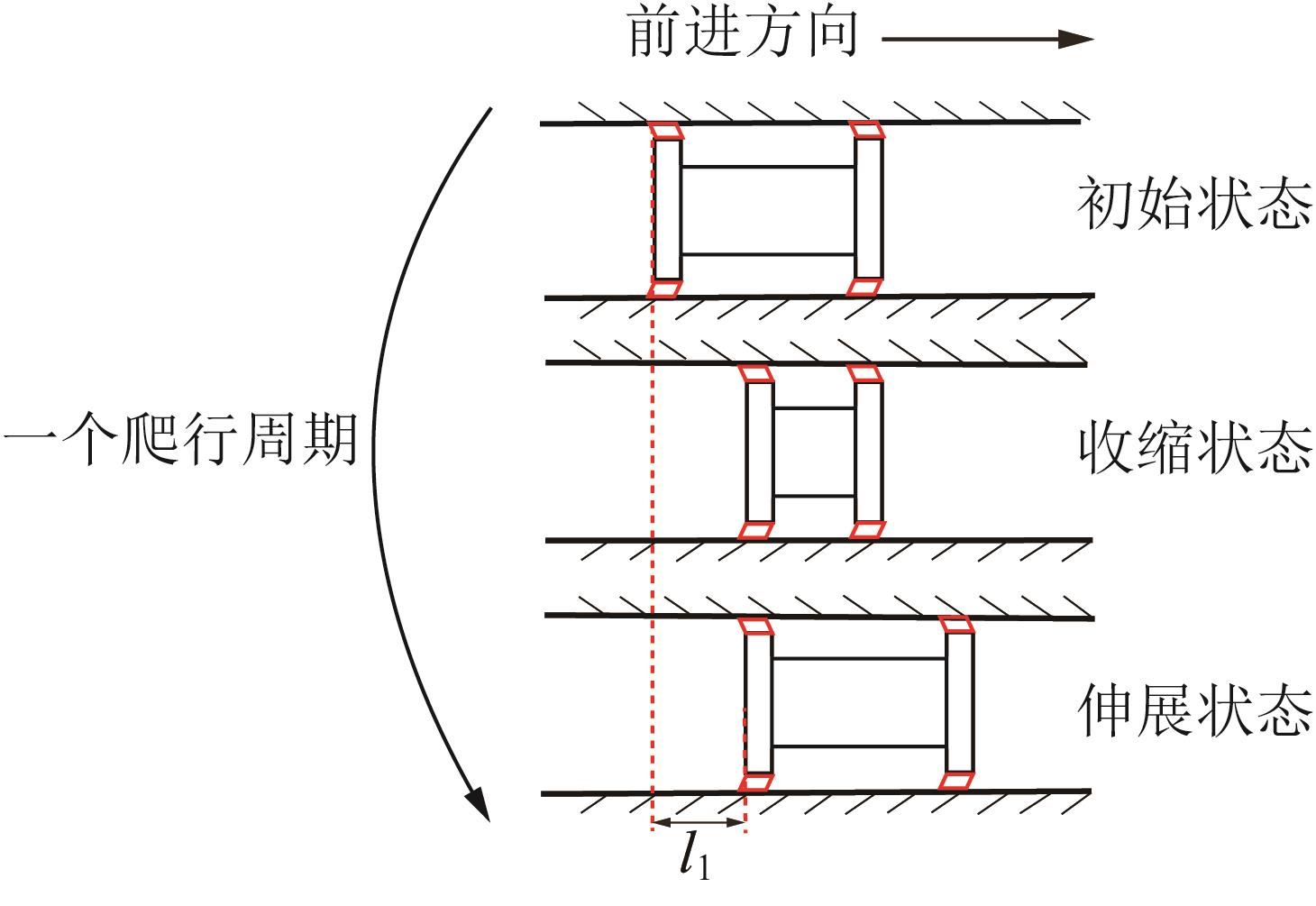
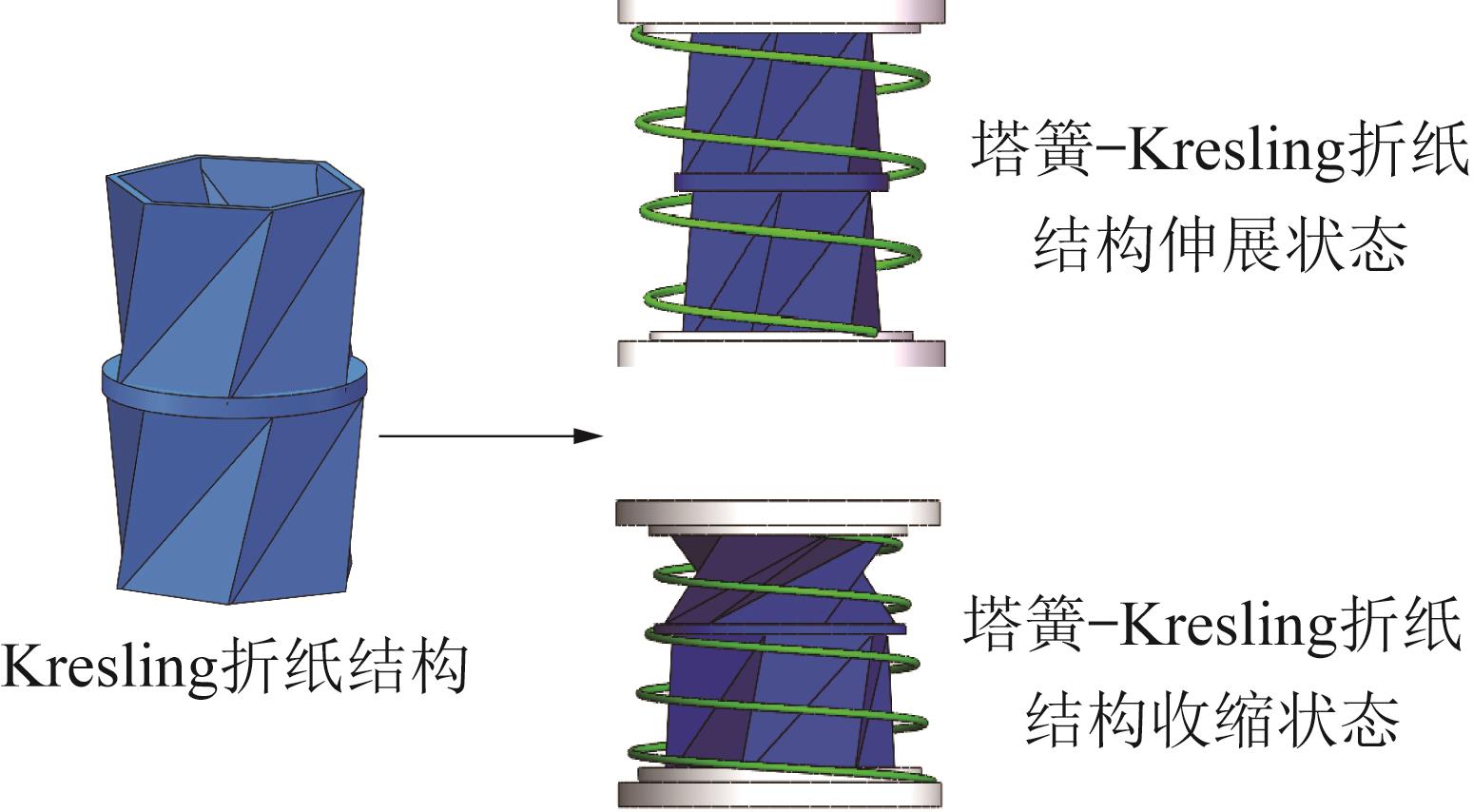
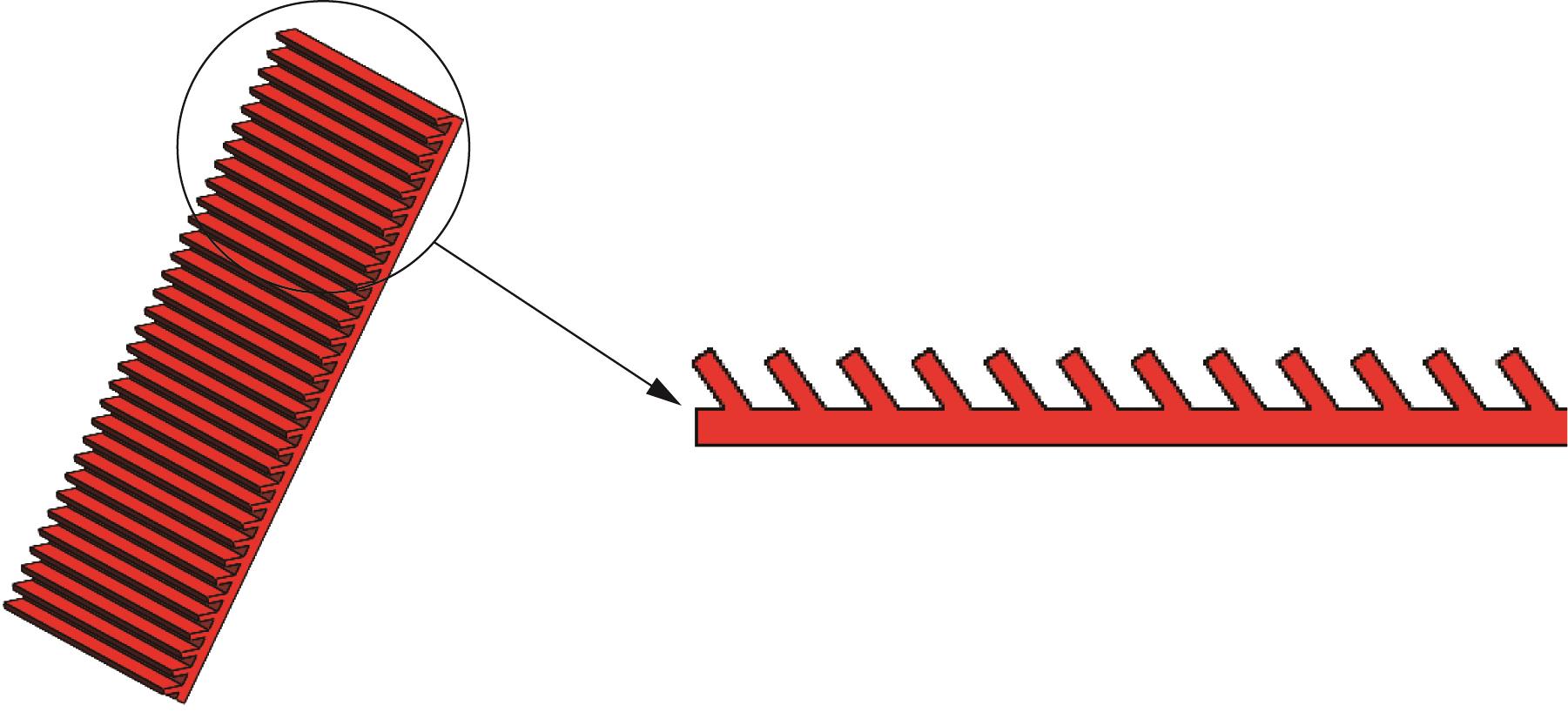
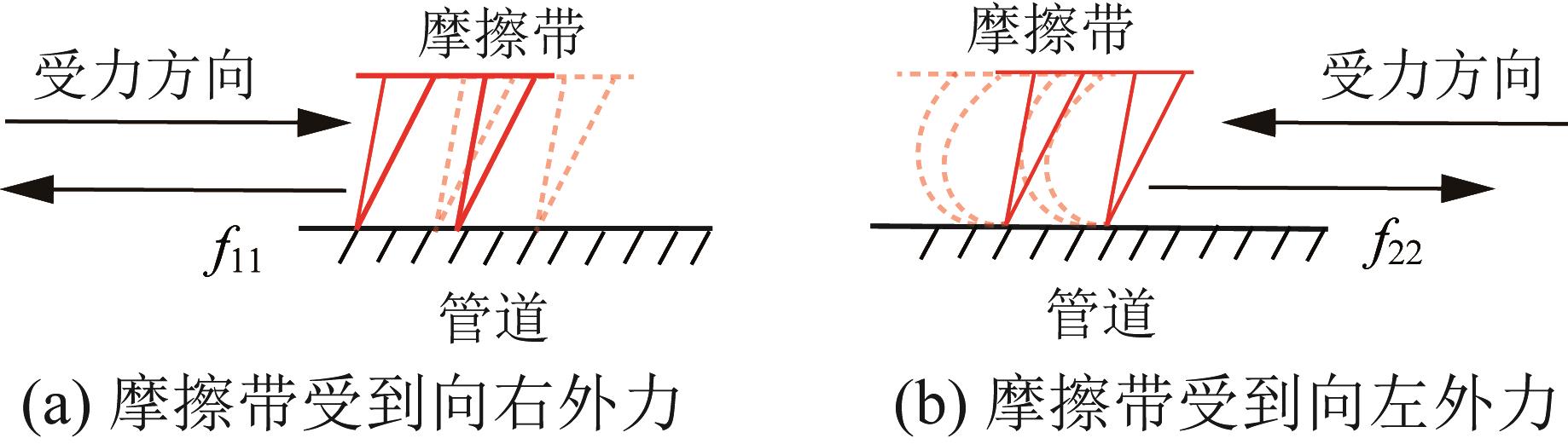
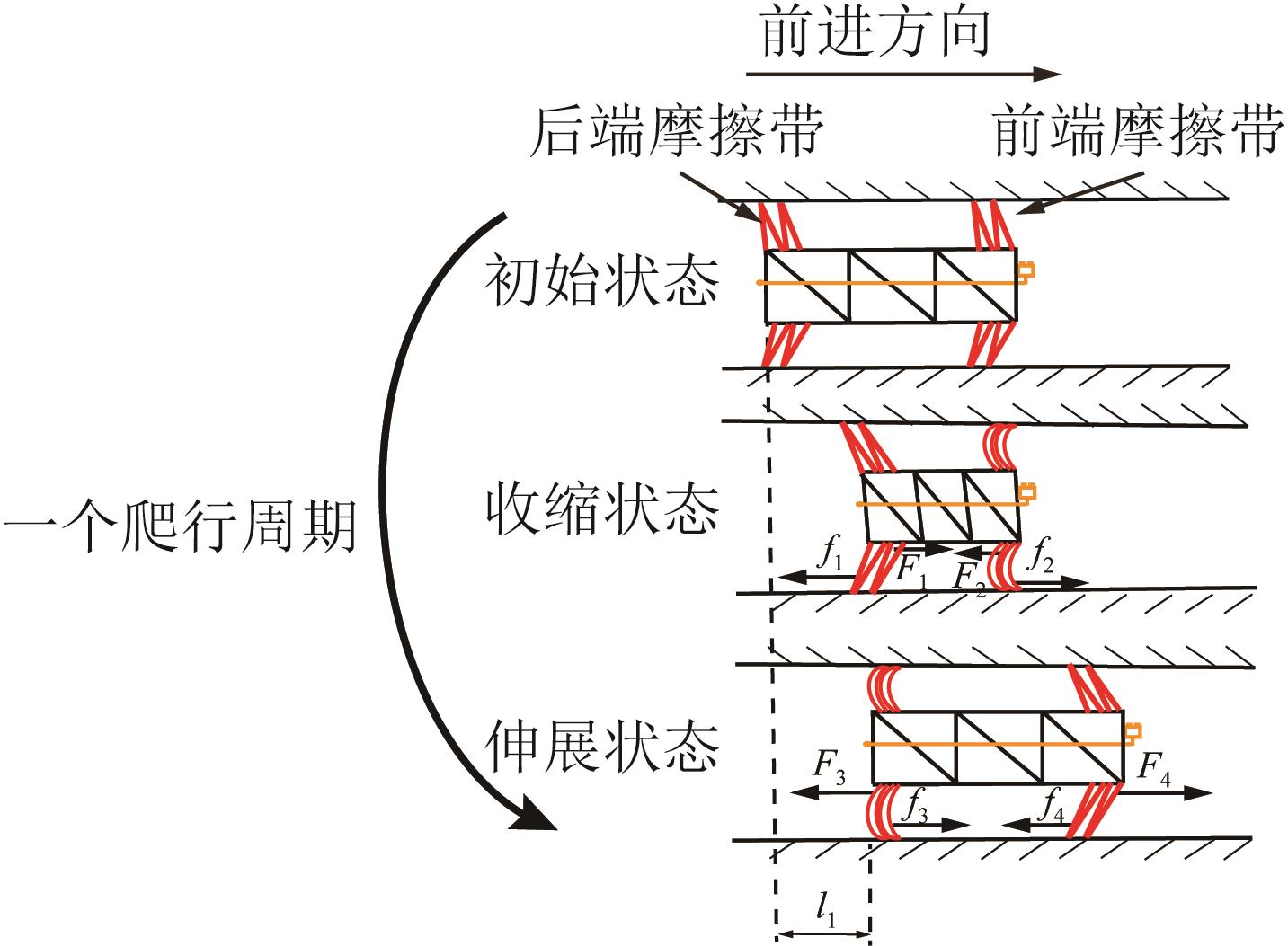
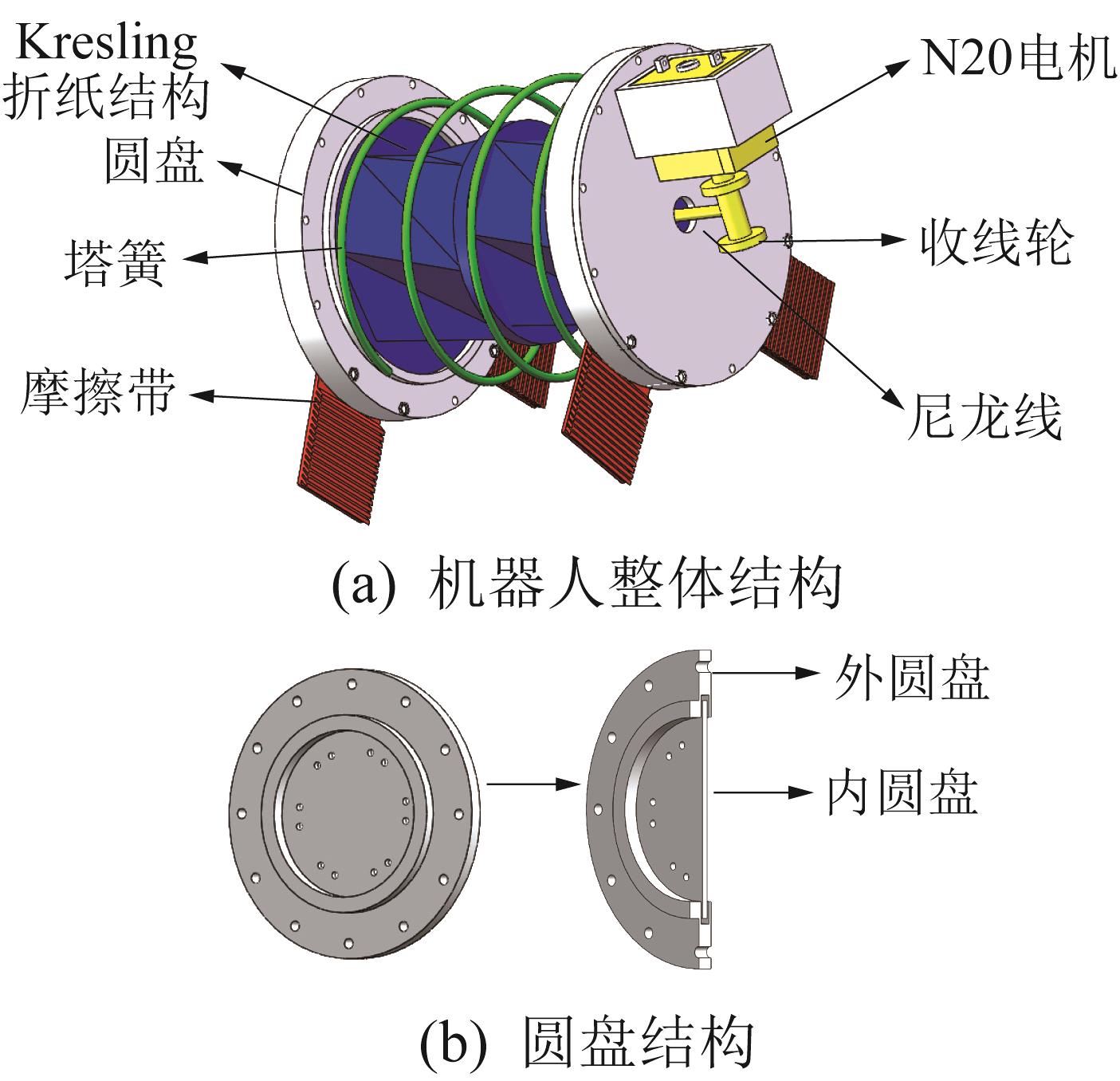
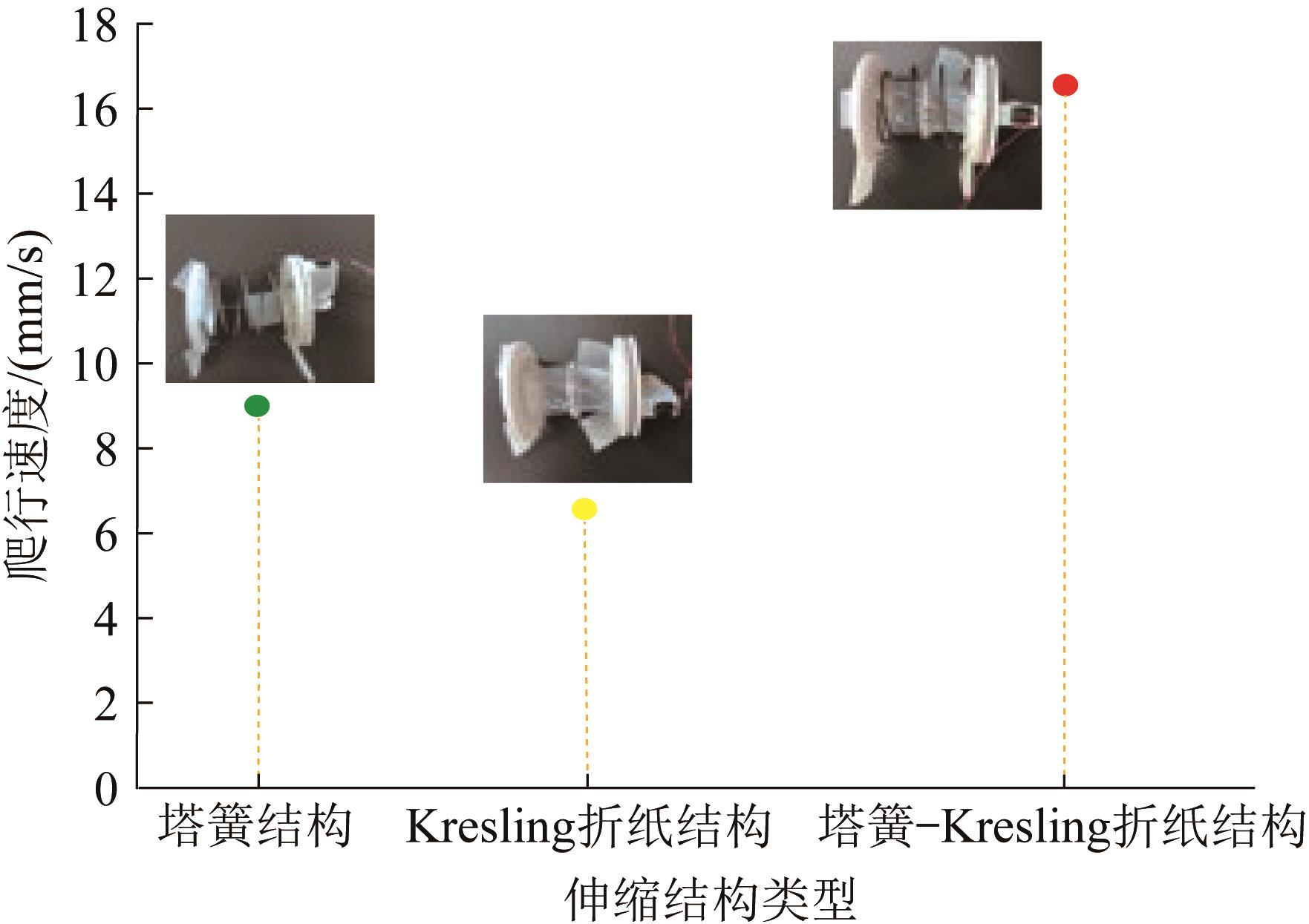
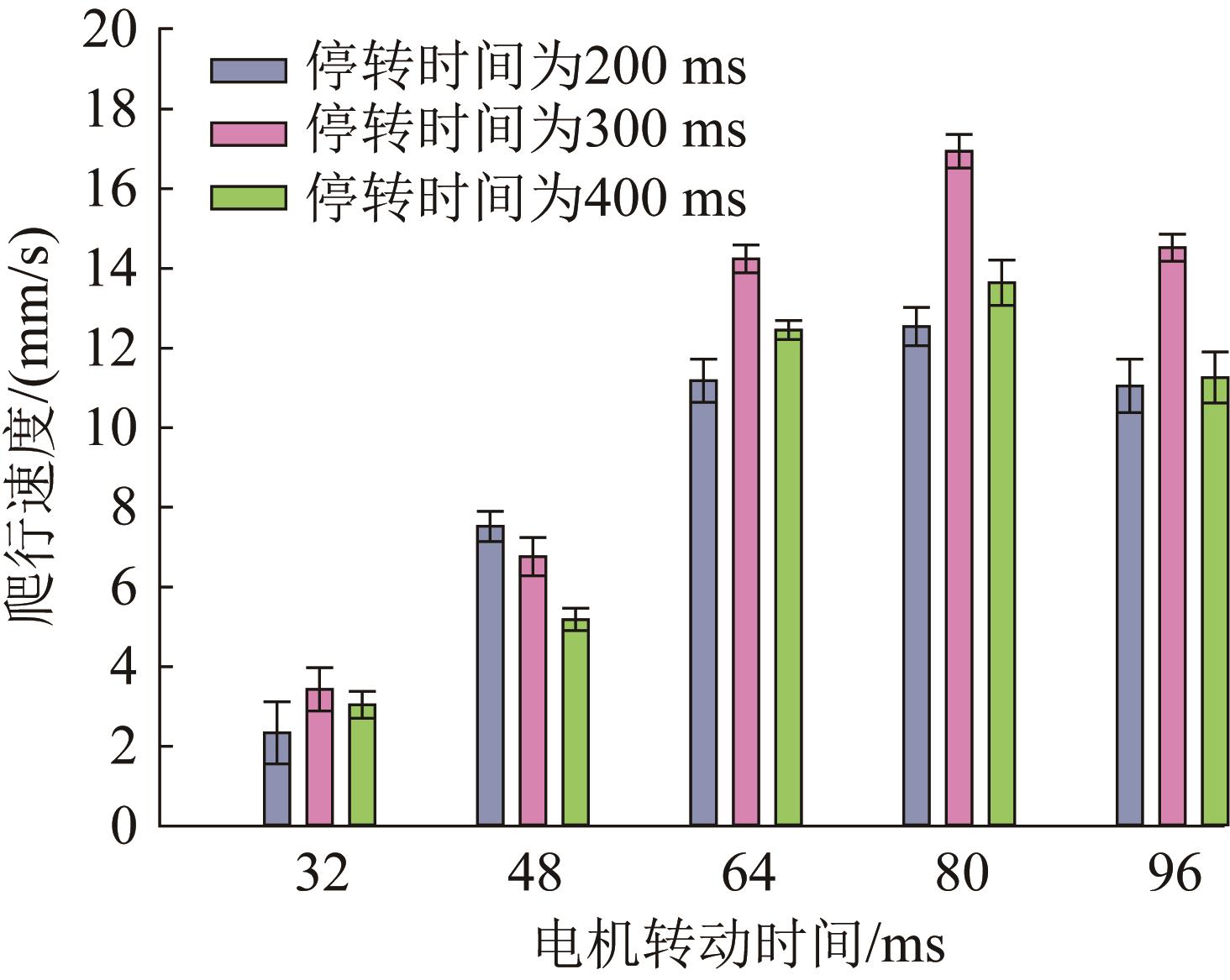
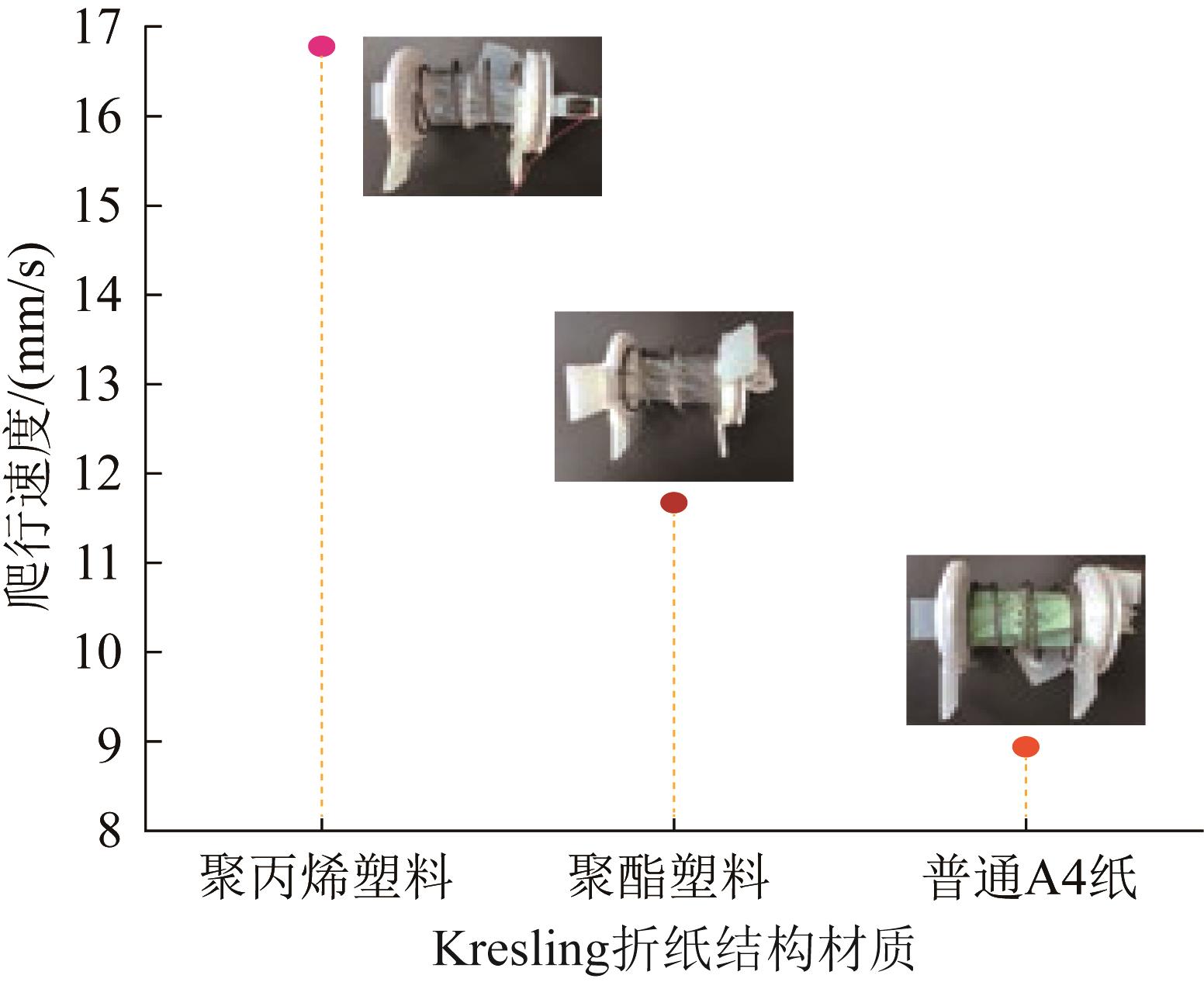
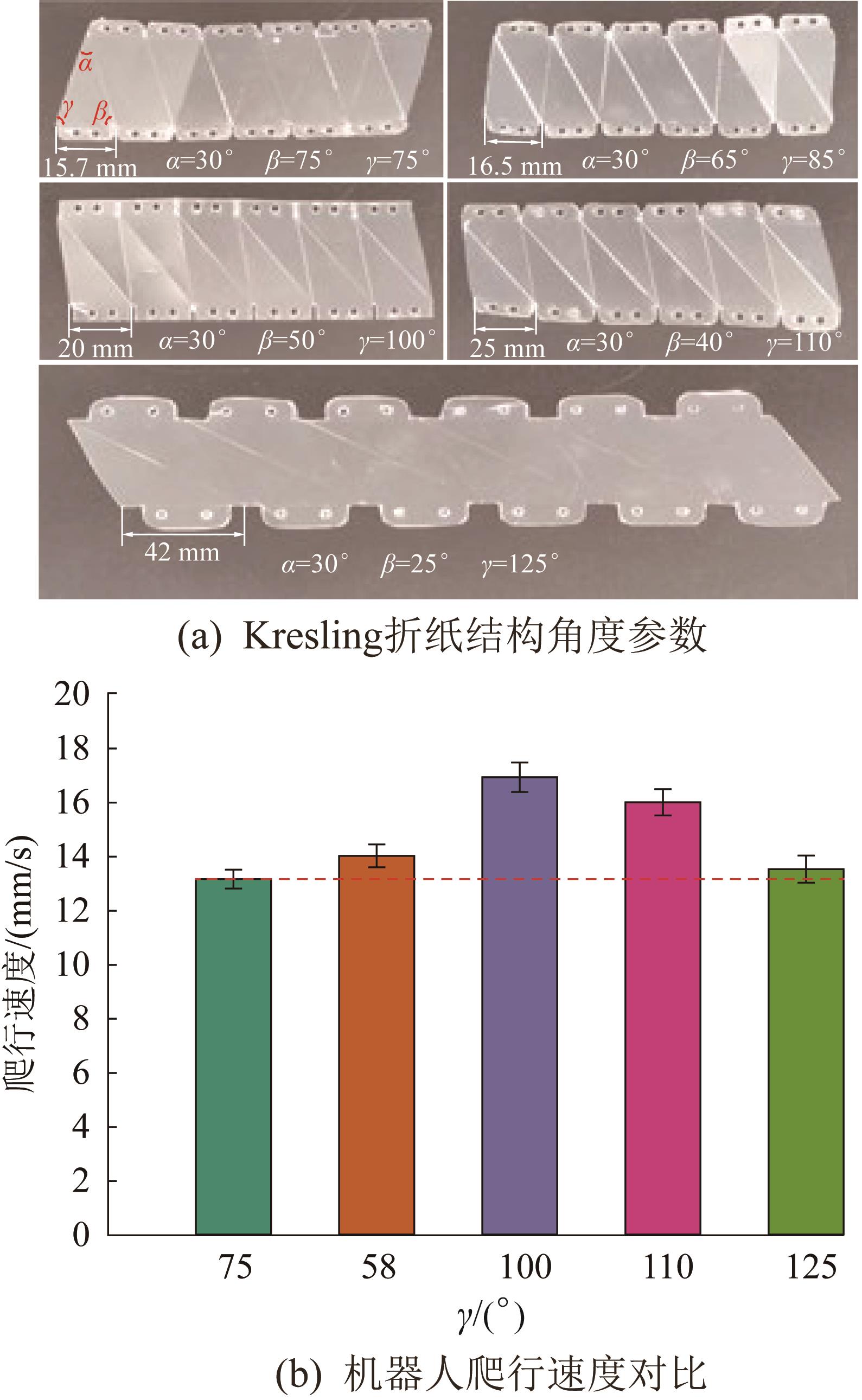
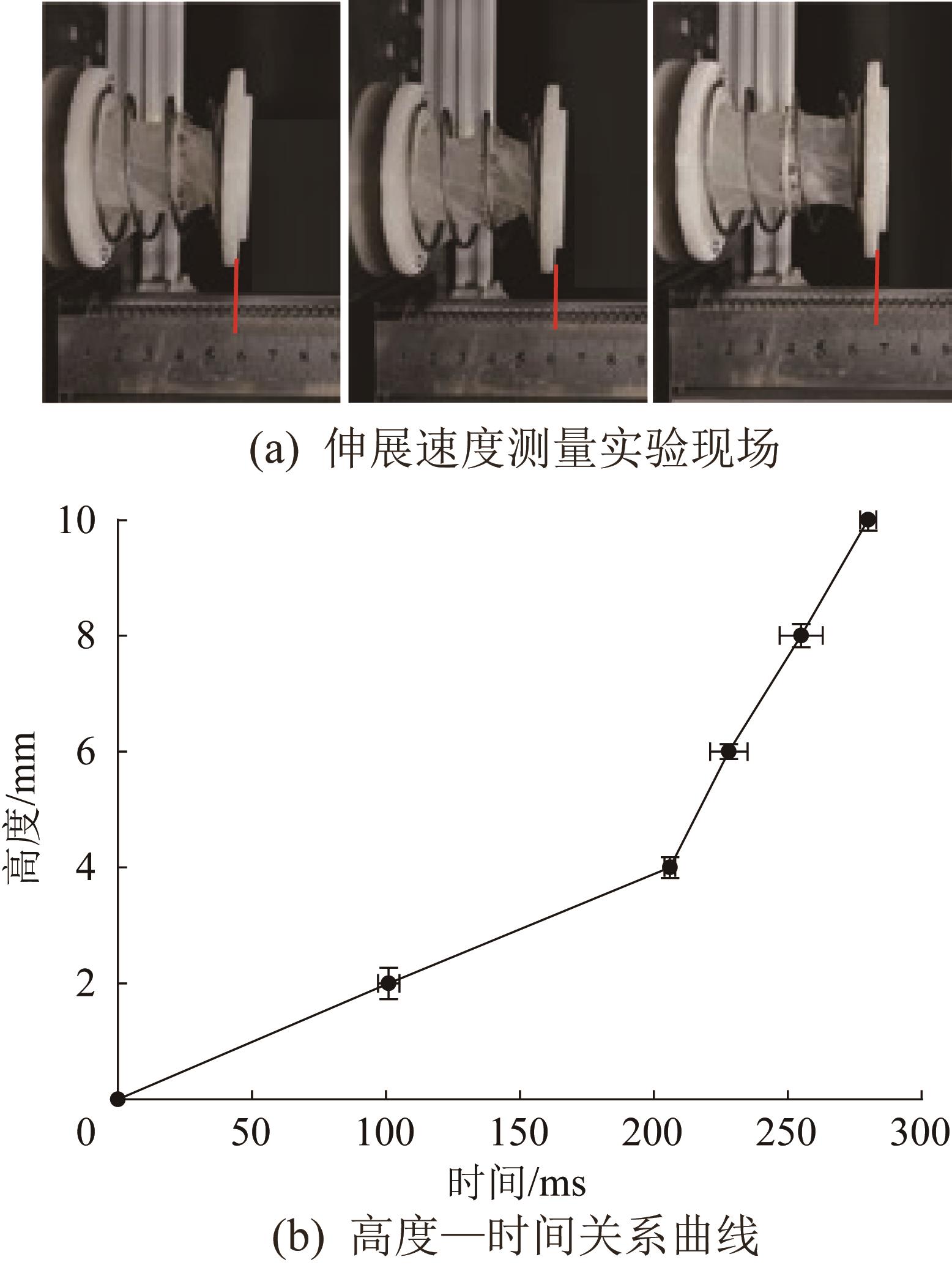
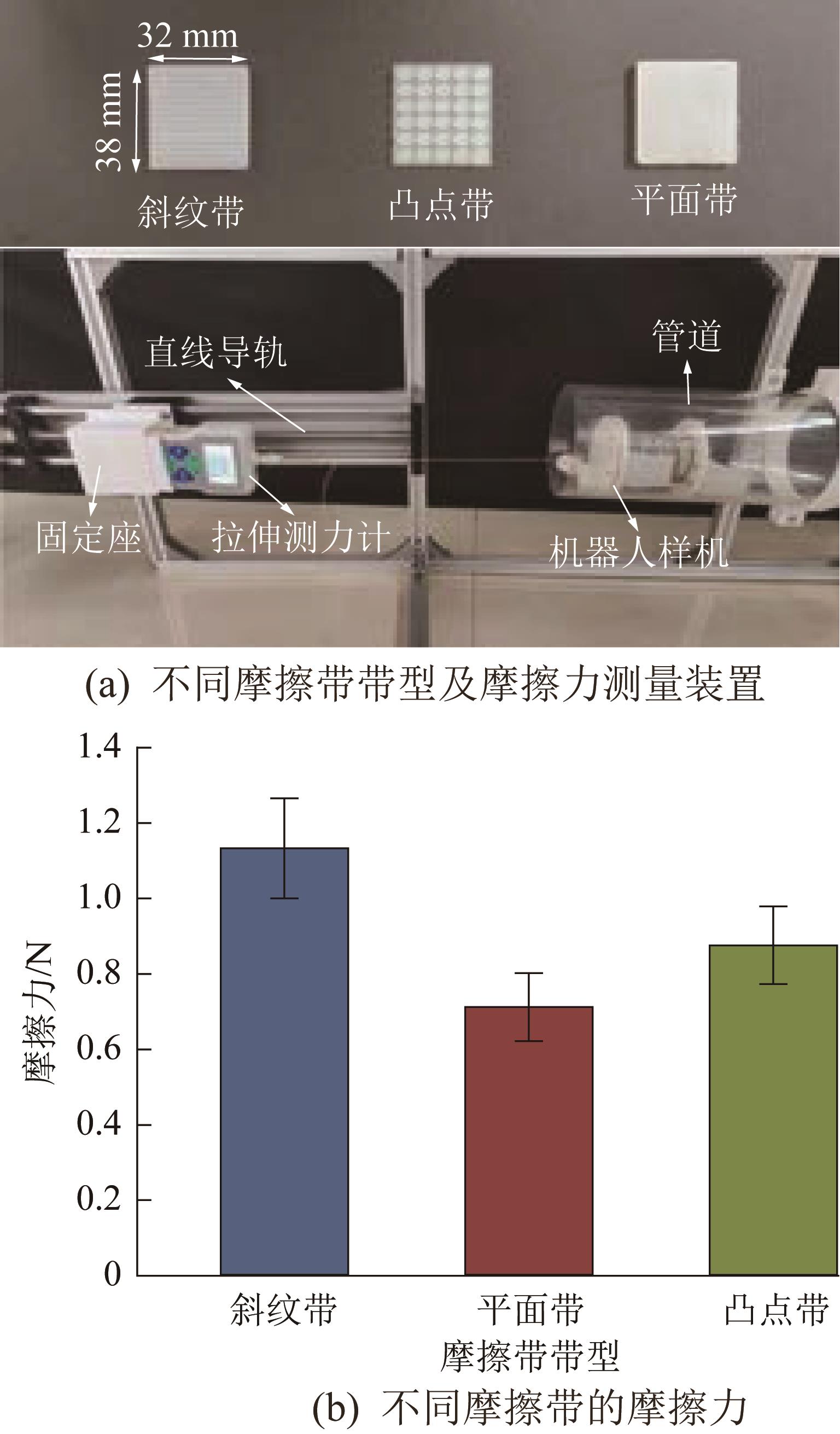
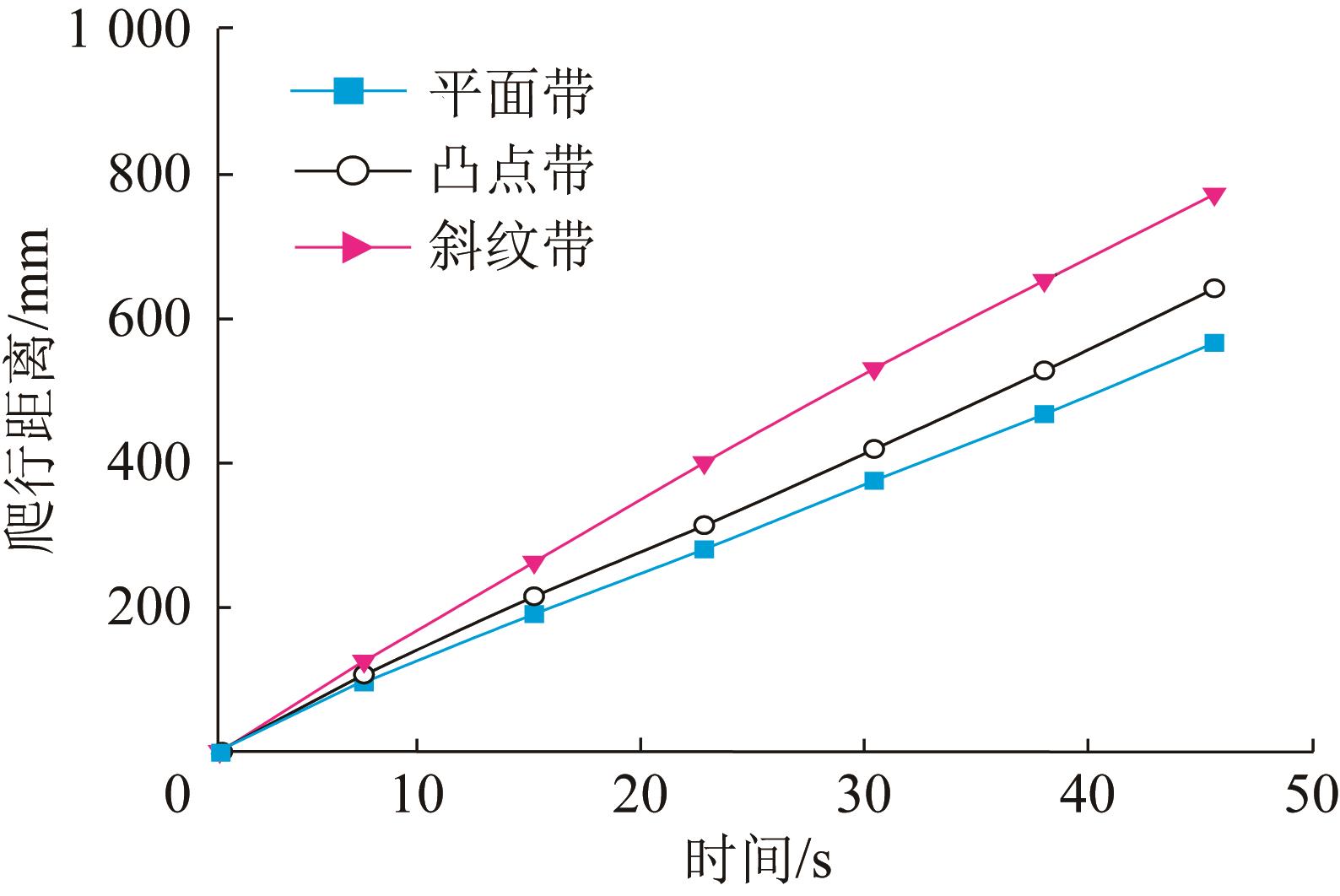
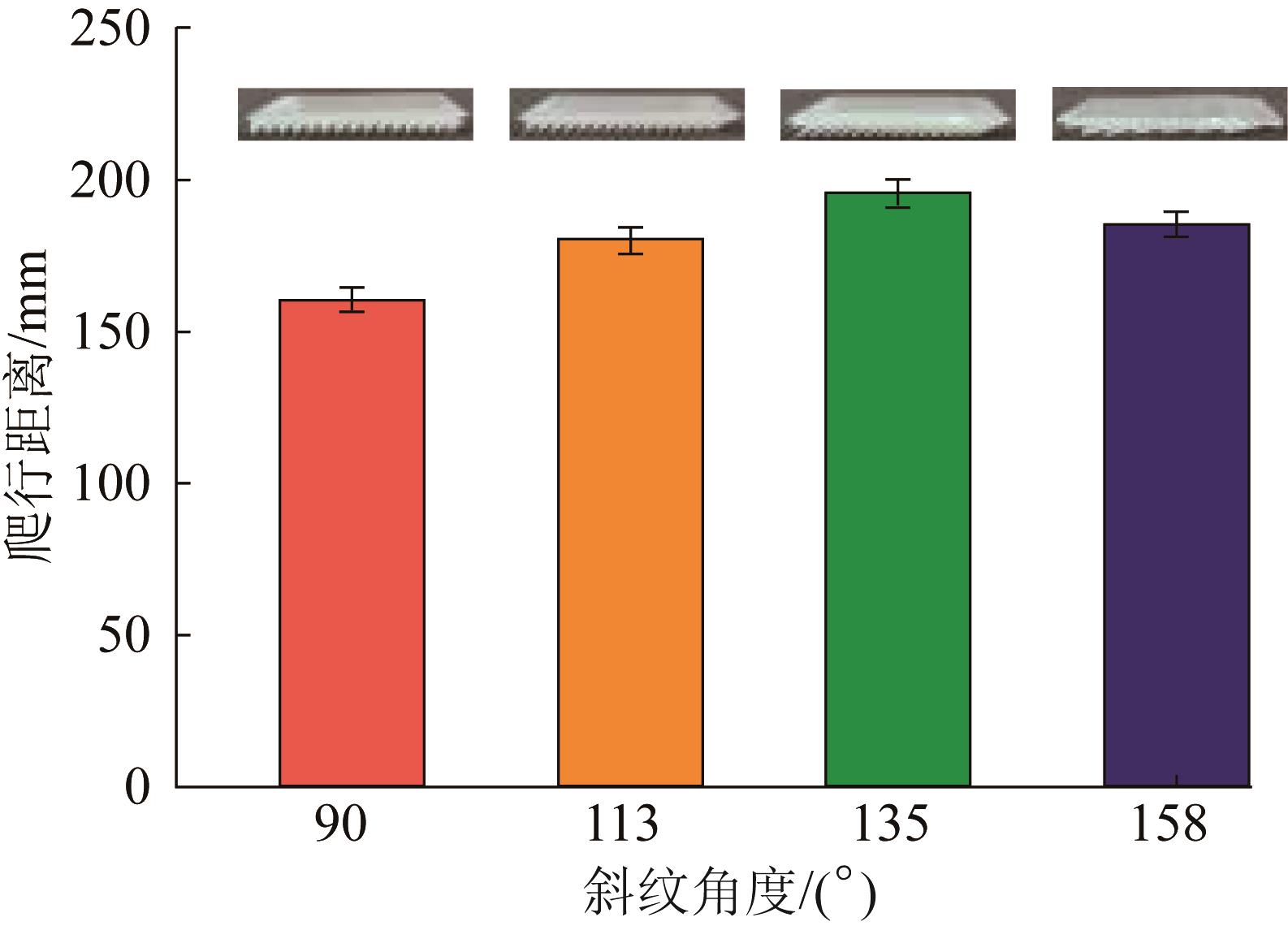
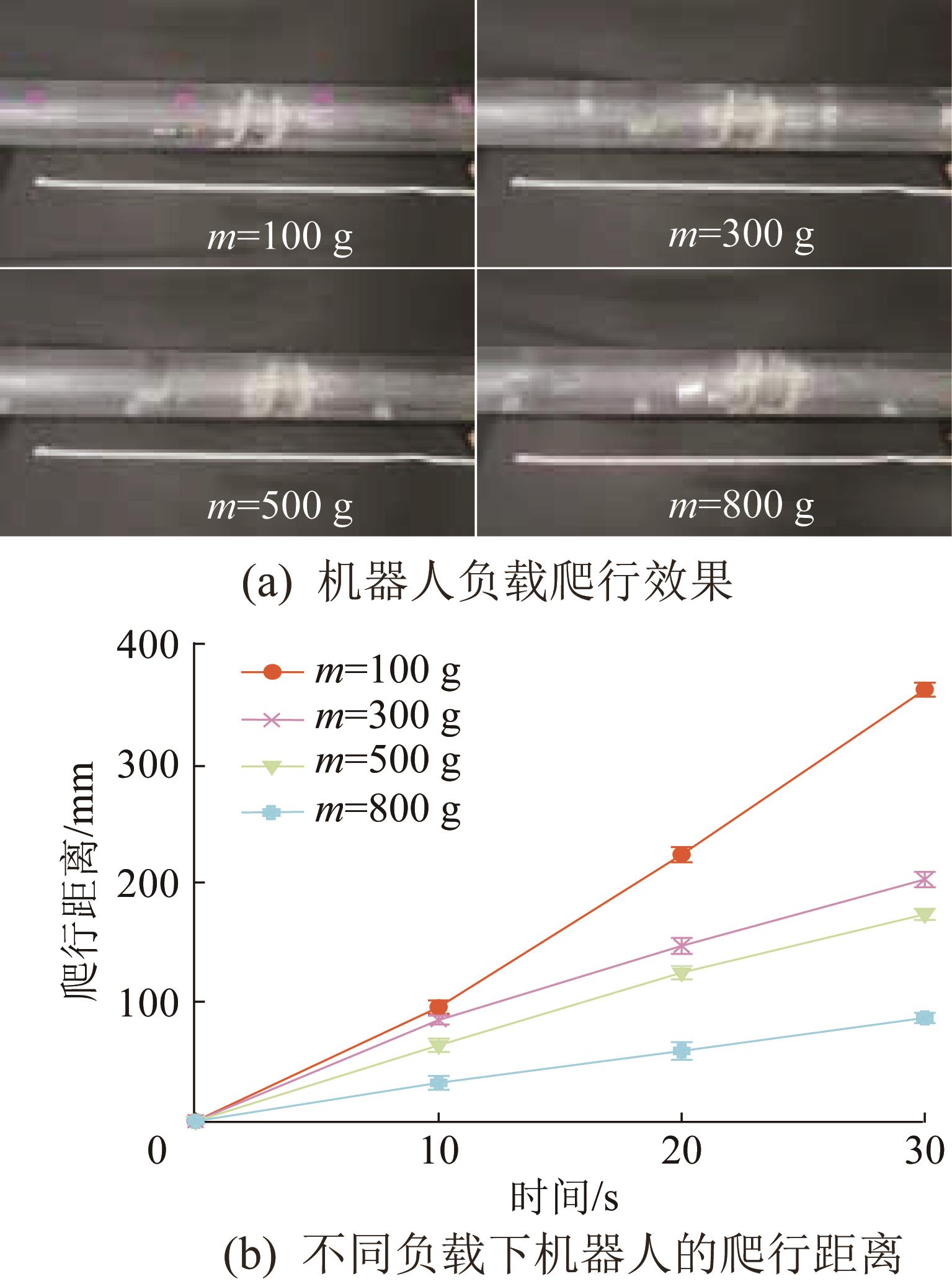
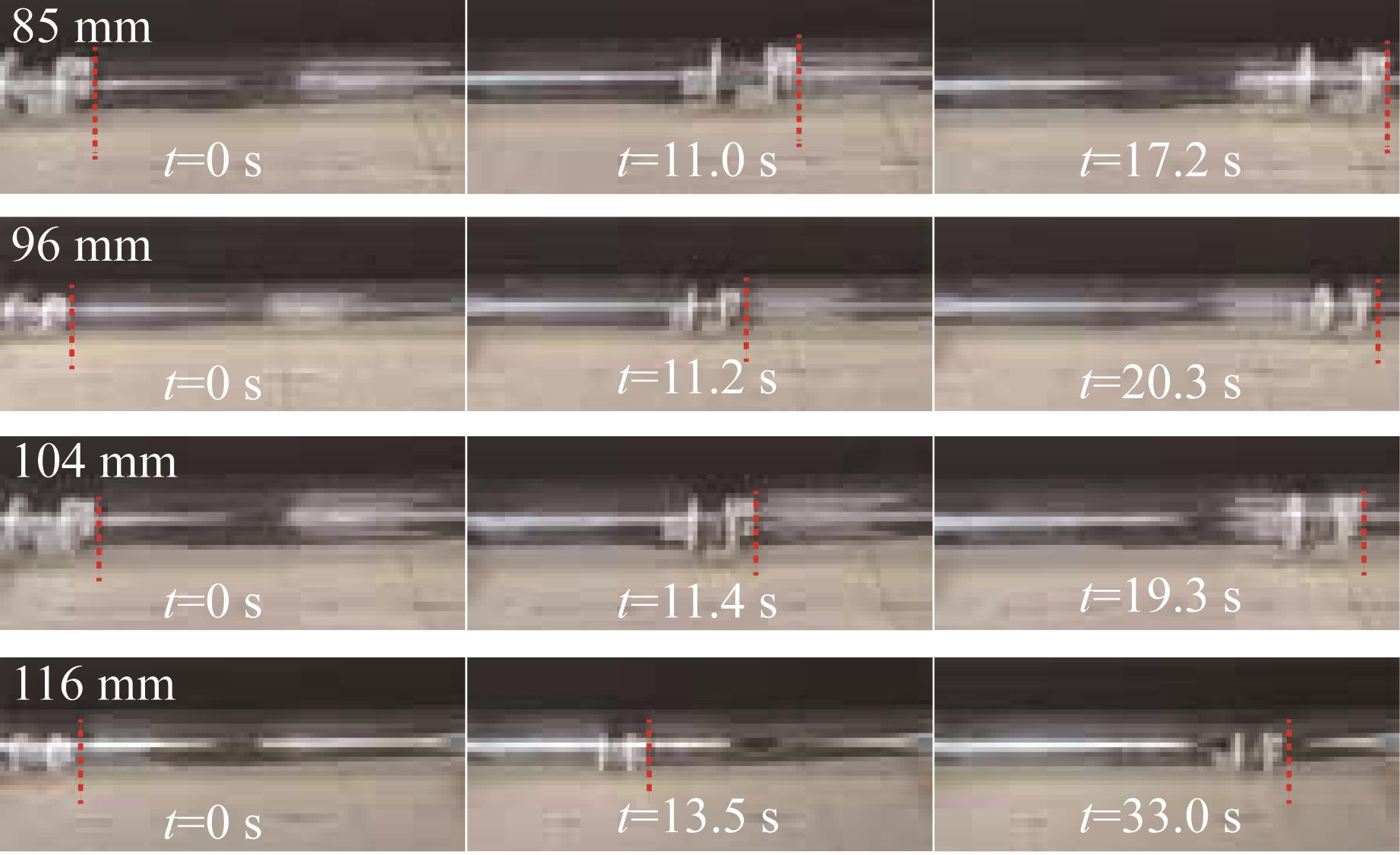
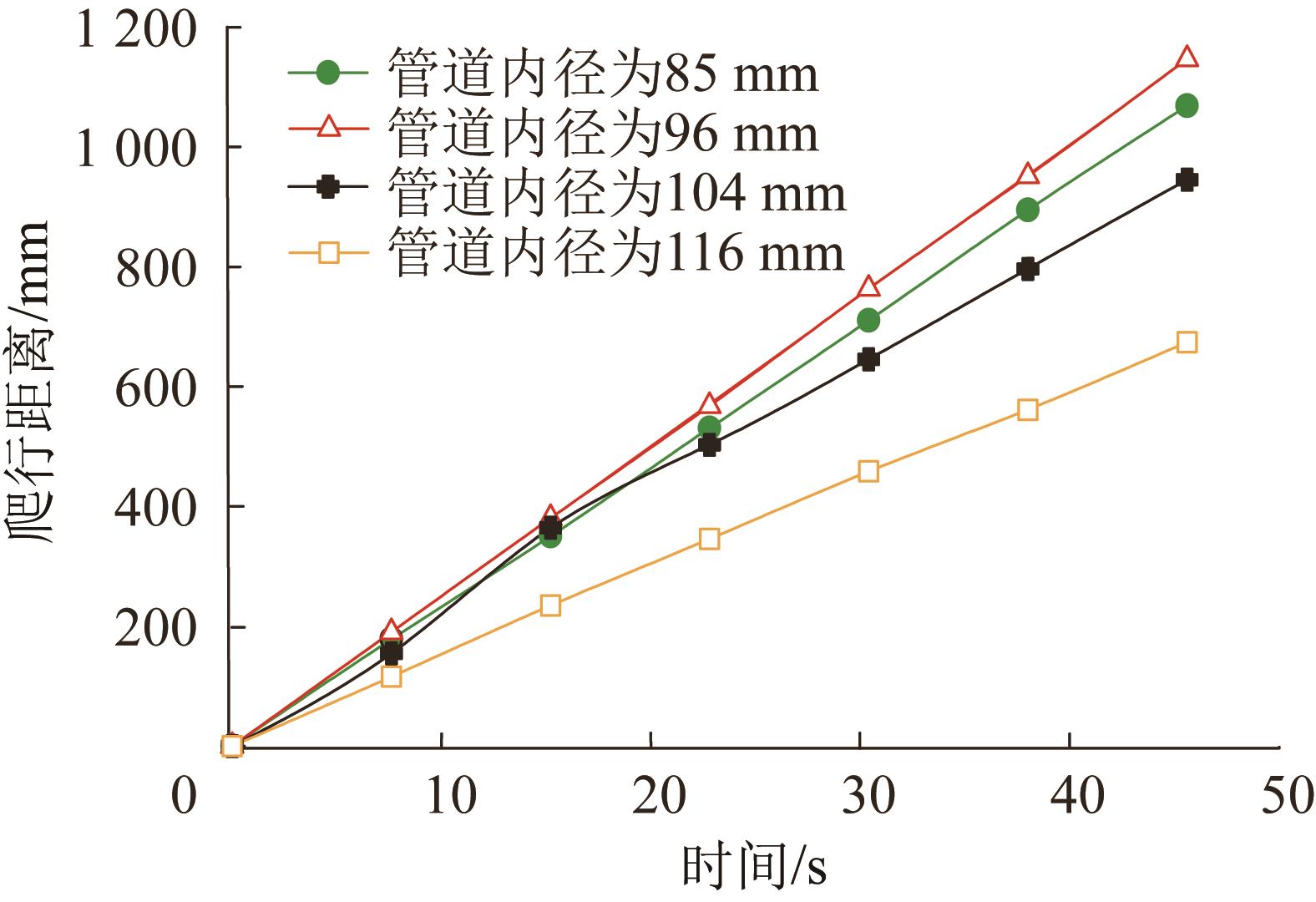
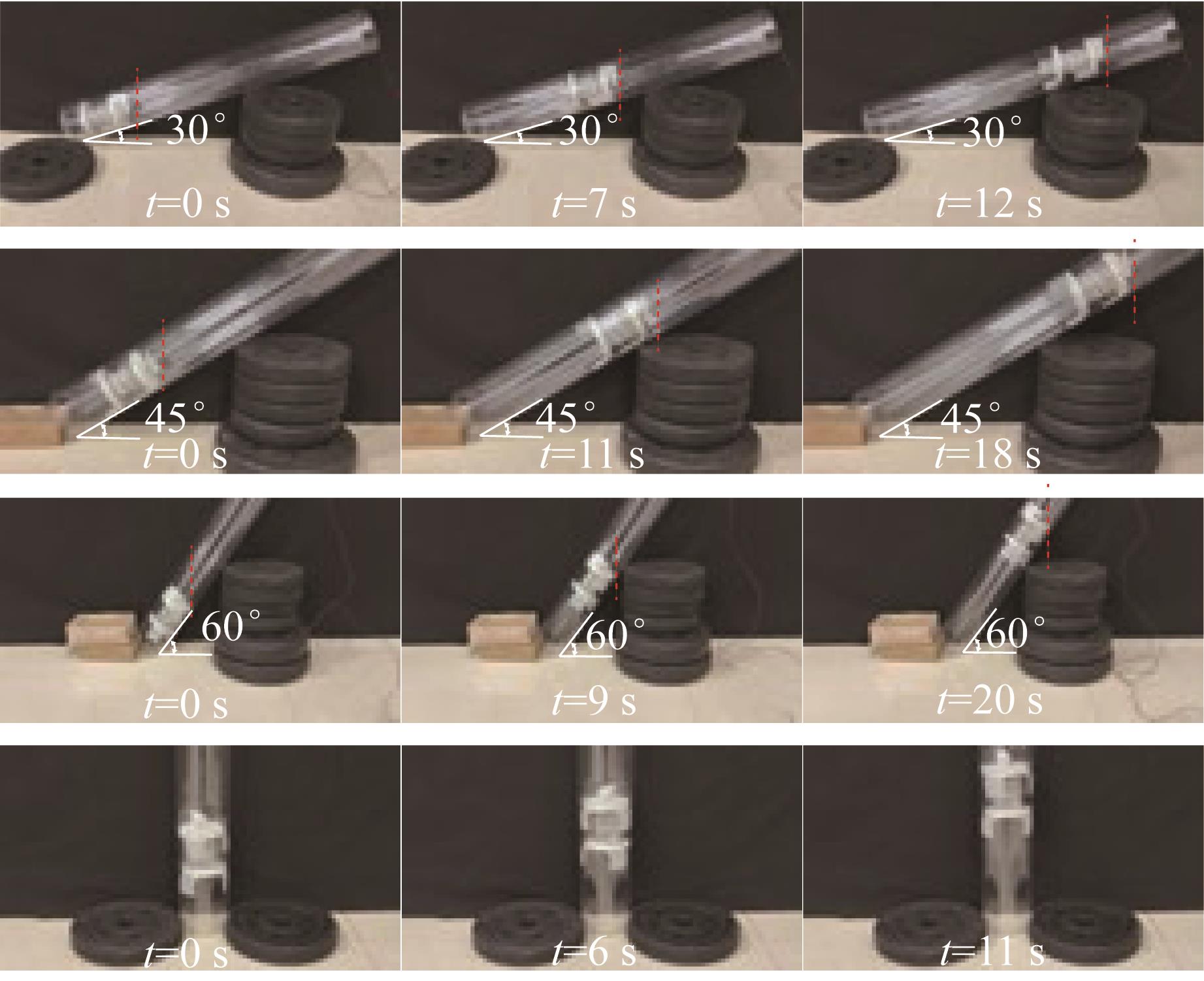
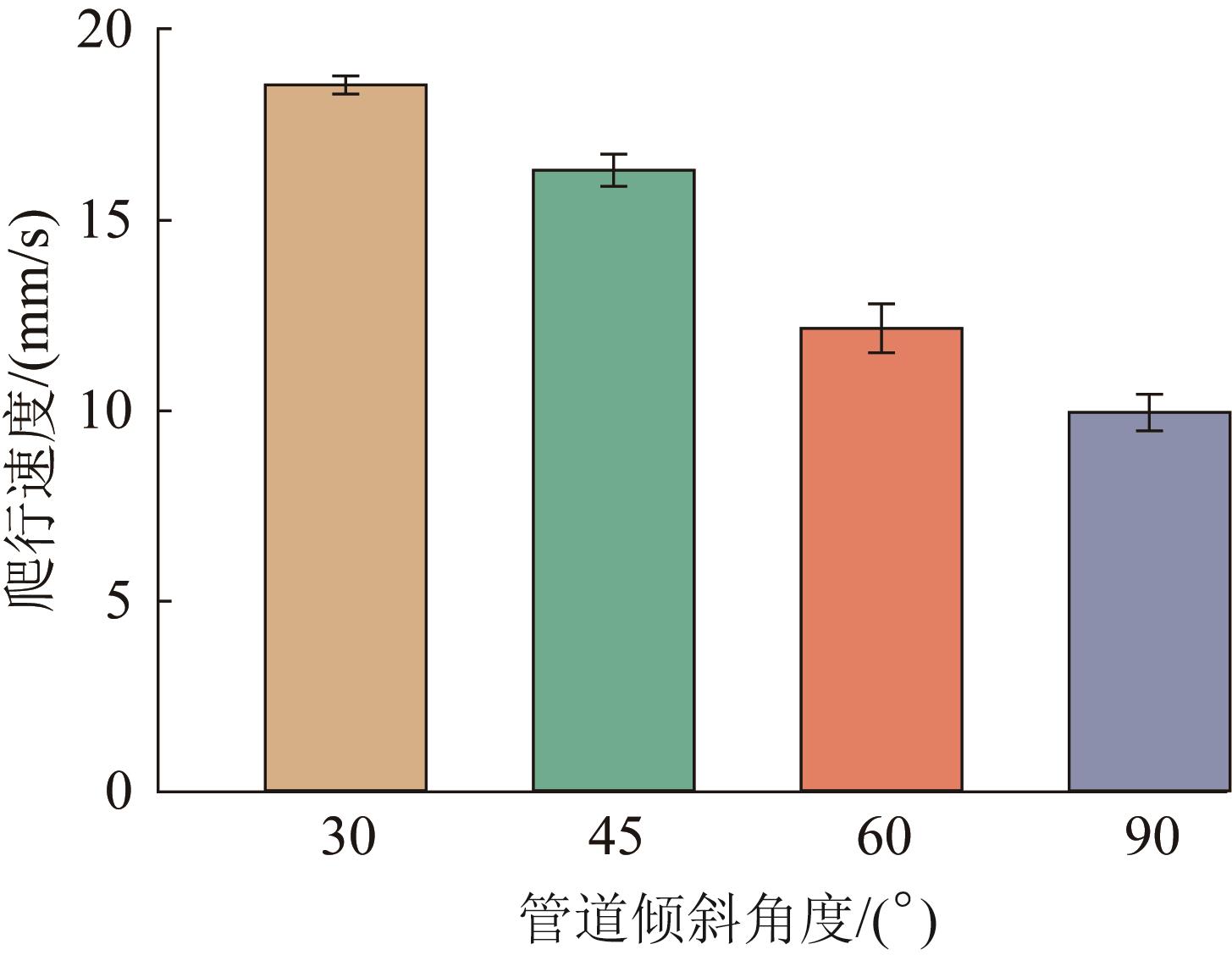
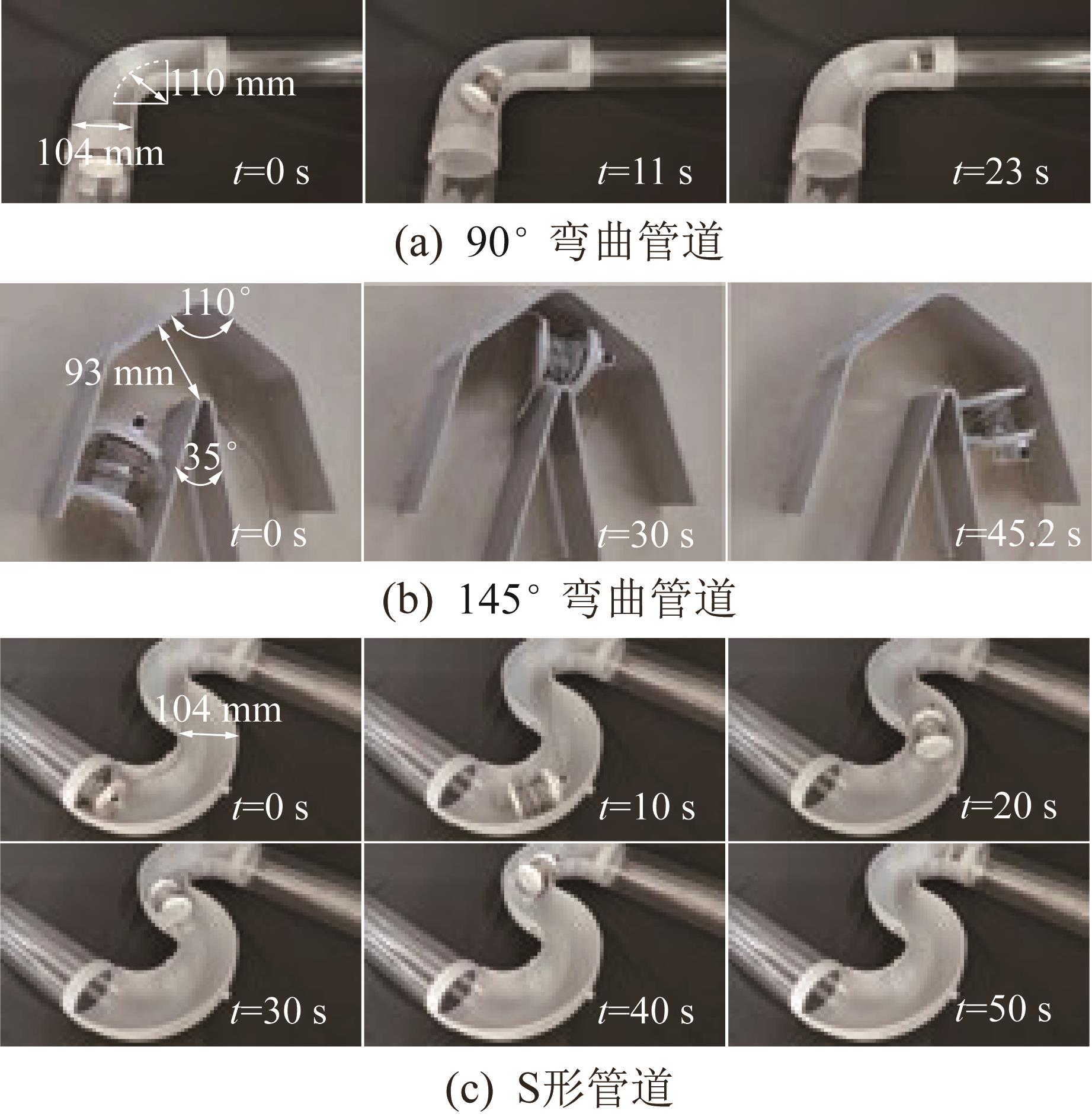
Abstract Aiming at the limitations of traditional rigid pipeline robots such as large volume and poor adaptability to unstructured environments, a soft pipeline robot based on Kresling origami structure is designed. Inspired by peristaltic crawling mode, the soft pipeline robot employed a tower spring-Kresling origami structure as the telescopic structure and silicone friction belts as the friction structure. The robot achieved a maximum payload of 5.9 times its own mass, a horizontal crawling speed of 25.14 mm/s and a crawling speed of 9.96 mm/s in vertical pipelines. Then, the effects of the telescopic structure type, the shrinkage length, material and angle parameters of Kresling origami structure, and the friction force on the robot's crawling speed were analyzed. Finally, the robot prototype was fabricated and the feasibility of the robot crawling in pipelines with different inner diameters, inclination angles and shapes was demonstrated through experiments. The results showed that the designed robot had good adaptability and flexibility, and could use the compliance of Kresling origami structure to adapt to the complex pipeline environment, which provided a novel way for pipeline detection, maintenance and other applications.
|
|
Received: 09 January 2024
Published: 04 March 2025
|
|
|
|
Corresponding Authors:
Junfeng HU
E-mail: 1300750231@qq.com;hjfsuper@126.com
|
基于Kresling折纸结构的软体管道机器人设计
针对传统刚性管道机器人体积大、对非结构化环境适应性差等缺陷,设计了一种基于Kresling折纸结构的软体管道机器人。受蠕动爬行方式启发,软体管道机器人以塔簧-Kresling折纸结构作为伸缩结构,以硅胶摩擦带作为摩擦结构。该机器人的最大负载为自身质量的5.9倍,最大水平爬行速度为25.14 mm/s,在垂直管道中的爬行速度可达9.96 mm/s。随后,分析了伸缩结构类型,Kresling折纸结构的收缩长度、材质与角度参数以及摩擦力等因素对机器人爬行速度的影响。最后,制作了机器人样机并通过实验展示了机器人在不同内径、倾斜角度、形状的管道中爬行的可行性。结果表明,所设计的机器人具有良好的适应性和灵活性,能利用Kresling折纸结构的柔顺性来适应复杂管道环境,这为管道探测、检修等应用提供了新颖的方式。
关键词:
Kresling折纸结构,
软体管道机器人,
伸缩结构,
摩擦结构,
柔顺性
|
|
| [1] |
彭善碧, 赵菂雯, 卢泓方, 等. 国外石油天然气行业非金属管道检测技术[J]. 中国安全生产科学技术, 2022, 18(12): 49-57.
PENG S B, ZHAO D W, LU H F, et al. Detection technologies of non-metallic pipelines in oil and gas industry at abroad[J]. Journal of Safety Science and Technology, 2022, 18(12): 49-57.
|
|
|
| [2] |
蒋程. 具有织物皮肤的仿蠕虫气动式管道机器人设计及应用研究[D]. 上海: 东华大学, 2021. doi:10.1177/00405175211016561
JIANG C. Design and application of worm-inspired pnuematic pipe robot with fabric skin[D]. Shanghai: Donghua University, 2021.
doi: 10.1177/00405175211016561
|
|
|
| [3] |
廖礼江. 圆形管道中机器人控制策略研究及管道变形率的测量[D]. 广州: 华南理工大学, 2012.
LIAO L J. The control law of the wheel robot and the measurement of pipeline deformation[D]. Guangzhou: South China University of Technology, 2012.
|
|
|
| [4] |
YANG Y X, CHEN X M, HAN Y H. Dadu-RBD: robot rigid body dynamics accelerator with multifunctional pipelines[C]//Proceedings of the 56th Annual IEEE/ACM International Symposium on Microarchitecture. Toronto, Oct. 28-Nov. 1, 2023.
|
|
|
| [5] |
JANG H, KIM T Y, LEE Y C, et al. A review: technological trends and development direction of pipeline robot systems[J]. Journal of Intelligent & Robotic Systems, 2022, 105(3): 59.
|
|
|
| [6] |
KLANČAR G, ZDEŠAR A, BLAŽIČ S, et al. Wheeled mobile robotics: from fundamentals towards autonomous systems[M]. Oxford: Butterworth-Heinemann, 2017.
|
|
|
| [7] |
BRUZZONE L, NODEHI S E, FANGHELLA P. Tracked locomotion systems for ground mobile robots: a review[J]. Machines, 2022, 10(8): 648.
|
|
|
| [8] |
ZHANG A N, WANG T H, TRUBY R L, et al. Machine learning best practices for soft robot proprioception[C]//2023 IEEE/RSJ International Conference on Intelligent Robots and Systems. Detroit, MI, Oct. 1-5, 2023.
|
|
|
| [9] |
冯慧娟, 杨名远, 姚国强, 等. 折纸机器人[J]. 中国科学: 技术科学, 2018, 48(12): 1259-1274. doi:10.1360/n092018-00213
FENG H J, YANG M Y, YAO G Q, et al. Origami robots[J]. Scientia Sinica (Technologica), 2018, 48(12): 1259-1274.
doi: 10.1360/n092018-00213
|
|
|
| [10] |
TURNER N, GOODWINE B, SEN M. A review of origami applications in mechanical engineering[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2016, 230(14): 2345-2362.
|
|
|
| [11] |
LIU J B, MA G Y, MA Z, et al. Origami-inspired soft-rigid hybrid contraction actuator and its application in pipe-crawling robot[J]. Smart Material Structures, 2023, 32(6): 065015.
|
|
|
| [12] |
CAI J G, DENG X W, ZHOU Y, et al. Bistable behavior of the cylindrical origami structure with Kresling pattern[J]. Journal of Mechanical Design, 2015, 137(6): 061406.
|
|
|
| [13] |
KAUFMANN J, BHOVAD P, LI S Y. Harnessing the multistability of Kresling origami for reconfigurable articulation in soft robotic arms[J]. Soft Robotics, 2022, 9(2): 212-223.
|
|
|
| [14] |
ZE Q J, WU S, NISHIKAWA J, et al. Soft robotic origami crawler[J]. Science Advances, 2022, 8(13): eabm7834.
|
|
|
| [15] |
BELKE C H, PAIK J. Mori: a modular origami robot[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(5): 2153-2164.
|
|
|
| [16] |
LIU X M, SONG M Z, FANG Y H, et al. Worm-inspired soft robots enable adaptable pipeline and tunnel inspection[J]. Advanced Intelligent Systems, 2022, 4(1): 2100128.
|
|
|
| [17] |
LIN Y, XU Y X, JUANG J Y. Single-actuator soft robot for in-pipe crawling[J]. Soft Robotics, 2023, 10(1): 174-186.
|
|
|
| [18] |
CIANCHETTI M, CALISTI M, MARGHERI L, et al. Bioinspired locomotion and grasping in water: the soft eight-arm OCTOPUS robot[J]. Bioinspiration & Biomimetics, 2015, 10(3): 035003.
|
|
|
| [19] |
SADEGHI A, DEL DOTTORE E, MONDINI A, et al. Passive morphological adaptation for obstacle avoidance in a self-growing robot produced by additive manufacturing[J]. Soft Robotics, 2020, 7(1): 85-94.
|
|
|
| [20] |
FORTERRE Y, SKOTHEIM J M, DUMAIS J, et al. How the Venus flytrap snaps[J]. Nature, 2005, 433(7024): 421-425.
|
|
|
| [21] |
张铁中, 杨丽, 陈兵旗, 等. 农业机器人技术研究进展[J]. 中国科学: 信息科学, 2010, 40(): 71-87.
ZHANG T Z, YANG L, CHEN B Q, et al. Research progress of agricultural robot technology[J]. Scientia Sinica (Informationis), 2010, 40(): 71-87.
|
|
|
| [22] |
LOONEY T C, SAVARD N M, TERAN G T, et al. Air-releasable soft robots for explosive ordnance disposal[C]//2022 IEEE 5th International Conference on Soft Robotics. Edinburgh, Apr. 4-8, 2022.
|
|
|
| [23] |
BOGUE R. The growing use of robots by the aerospace industry[J]. Industrial Robot, 2018, 45(6): 705-709.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|