| Robotic and Mechanism Design |
|

|
|
|
| Design and experimental research of deformable mobile robot based on tensegrity structure |
Hao ZHANG1( ),Qi YANG1,Binbin LIAN1(),Tao SUN1,2 ),Qi YANG1,Binbin LIAN1(),Tao SUN1,2 |
1.School of Mechanical Engineering, Tianjin University, Tianjin 300000, China
2.International Institute for Innovative Design and Manufacturing of Tianjin University in Zhejiang, Shaoxing 311800, China |
|
|
|
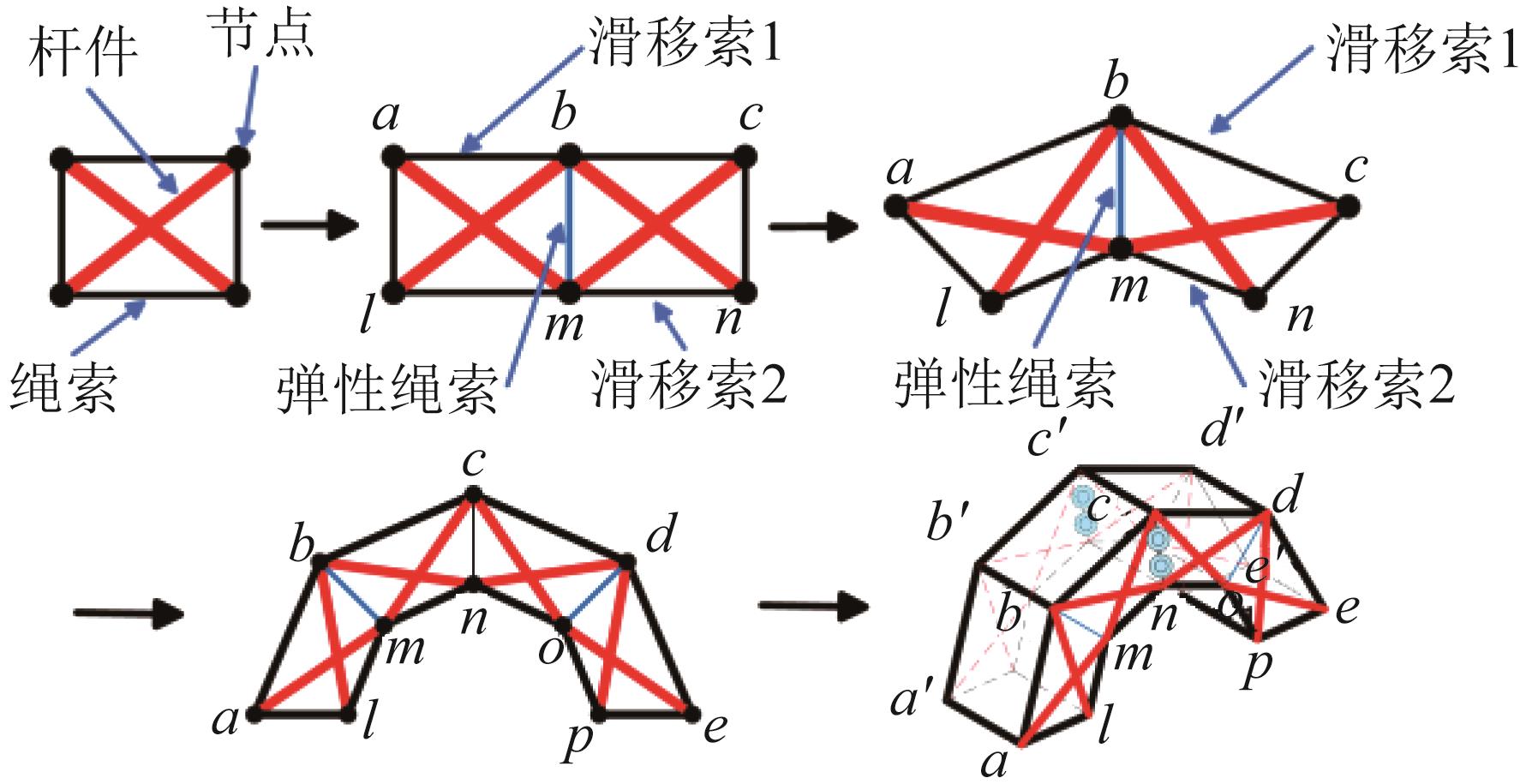
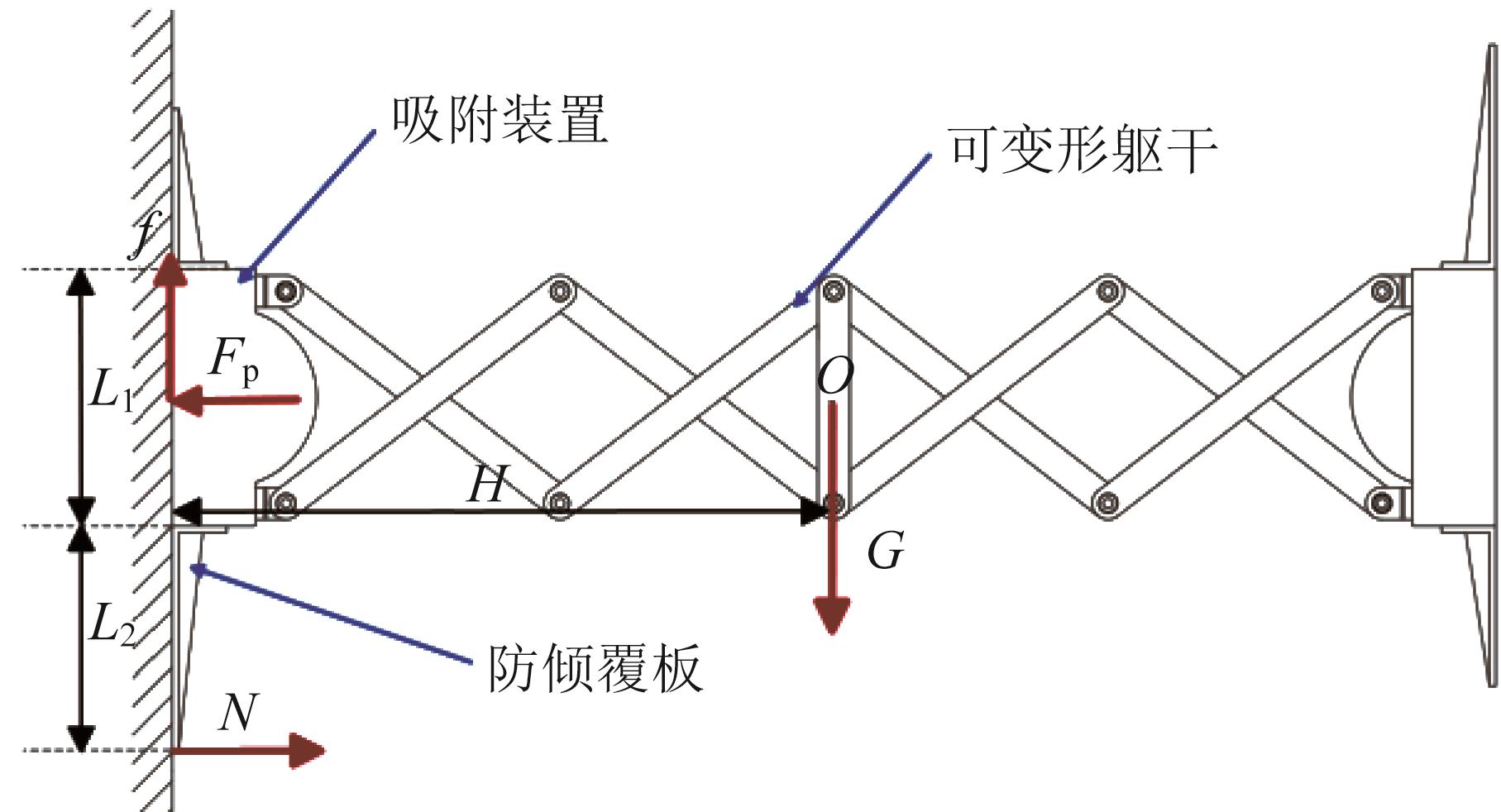
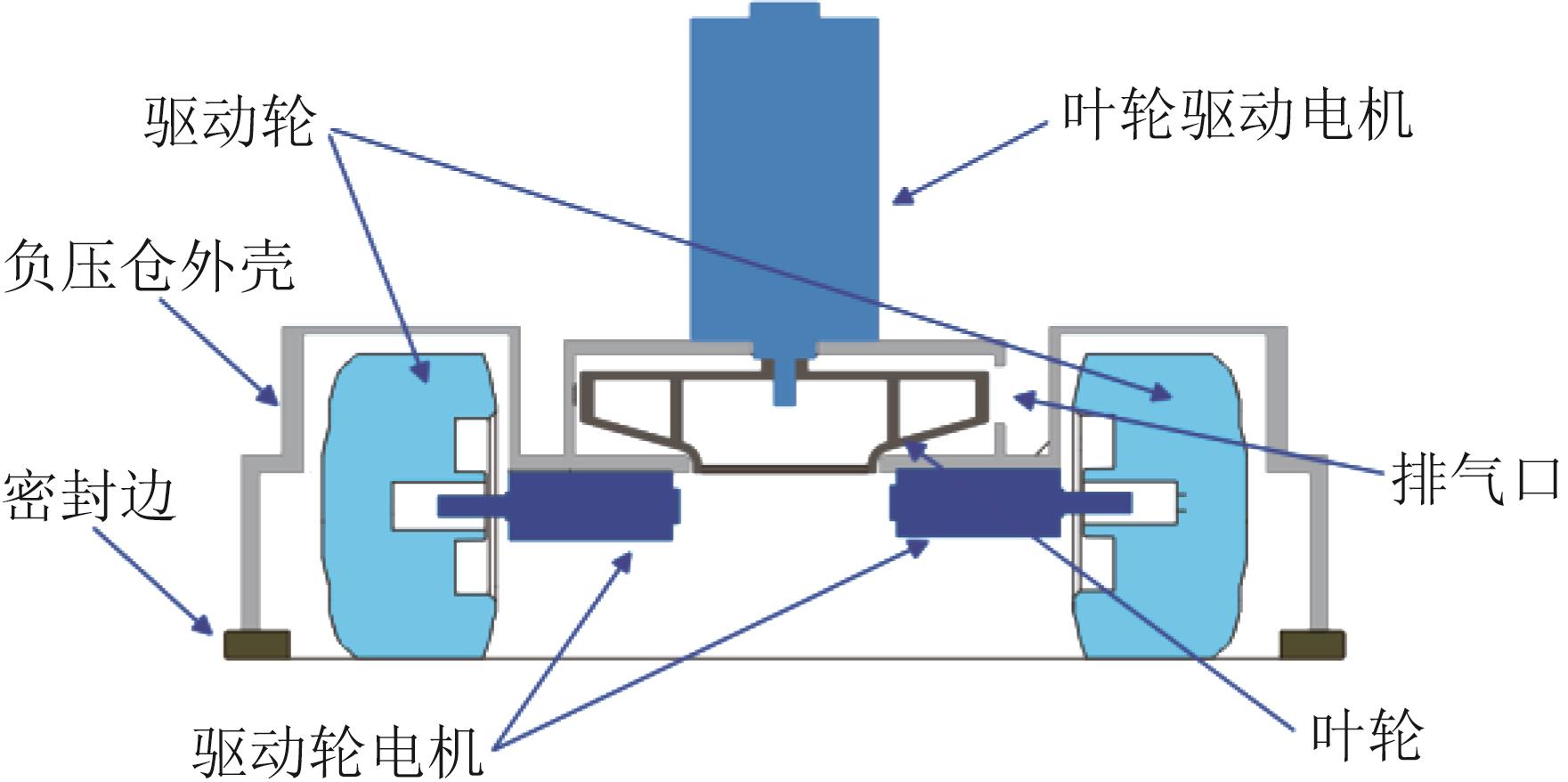
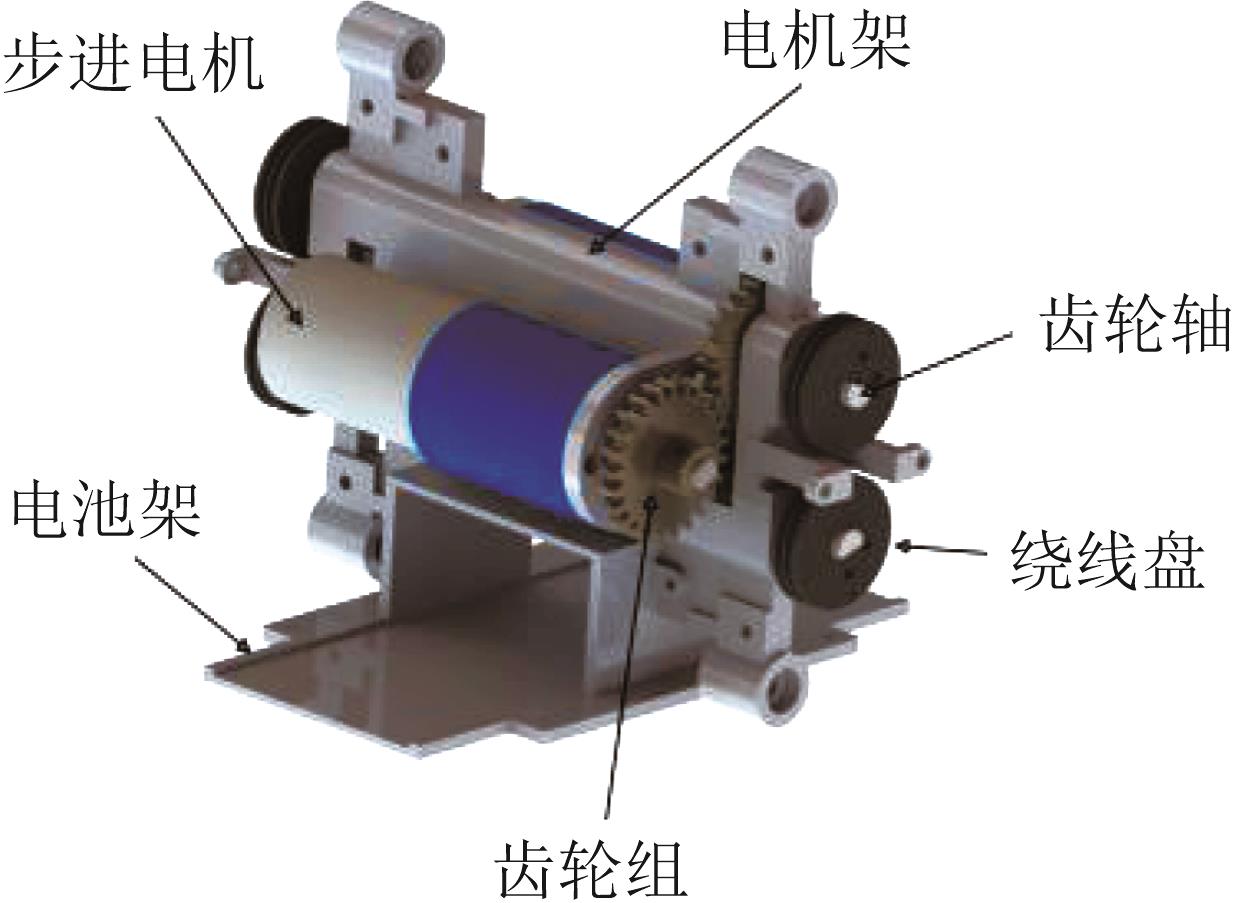
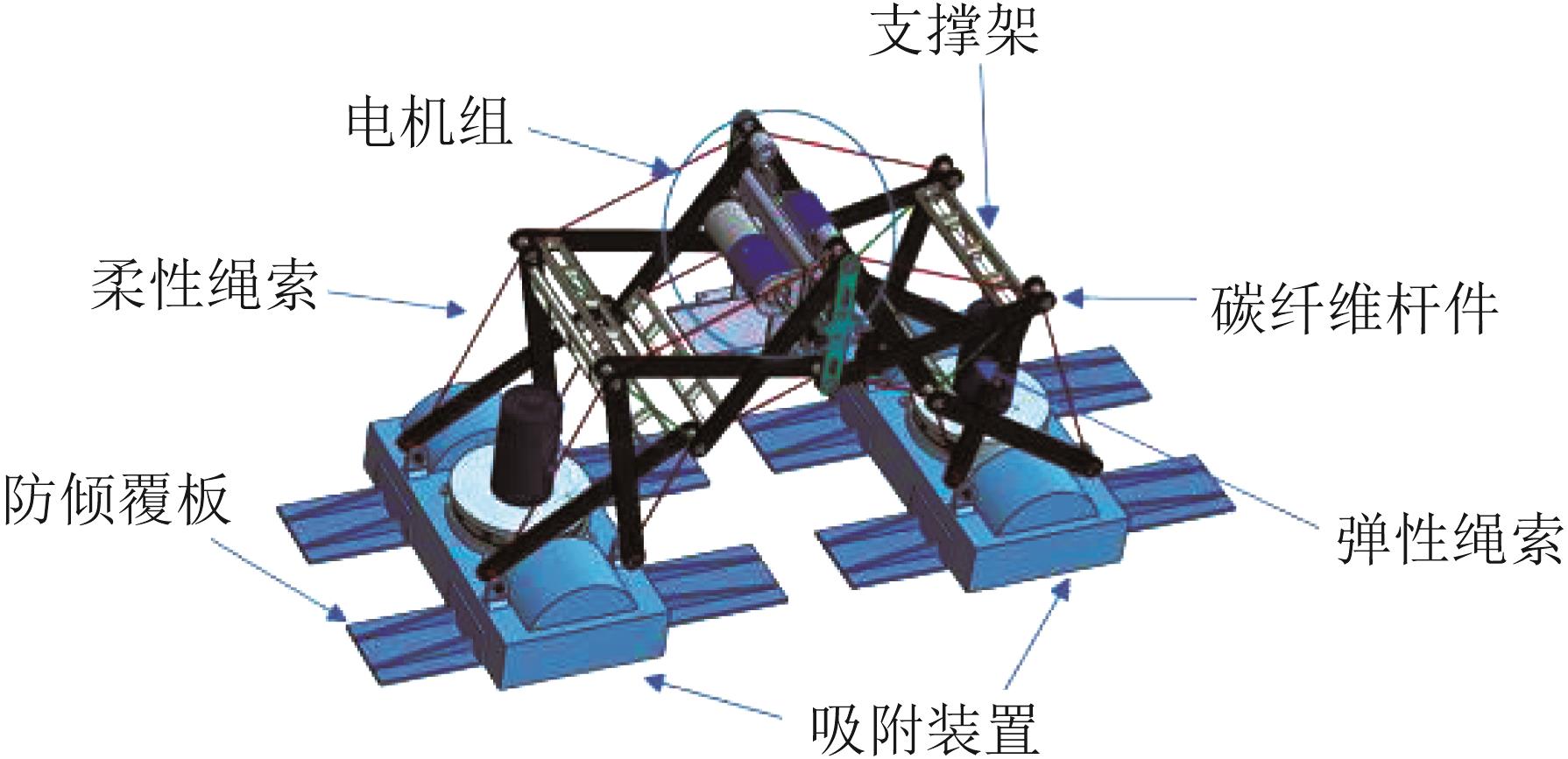
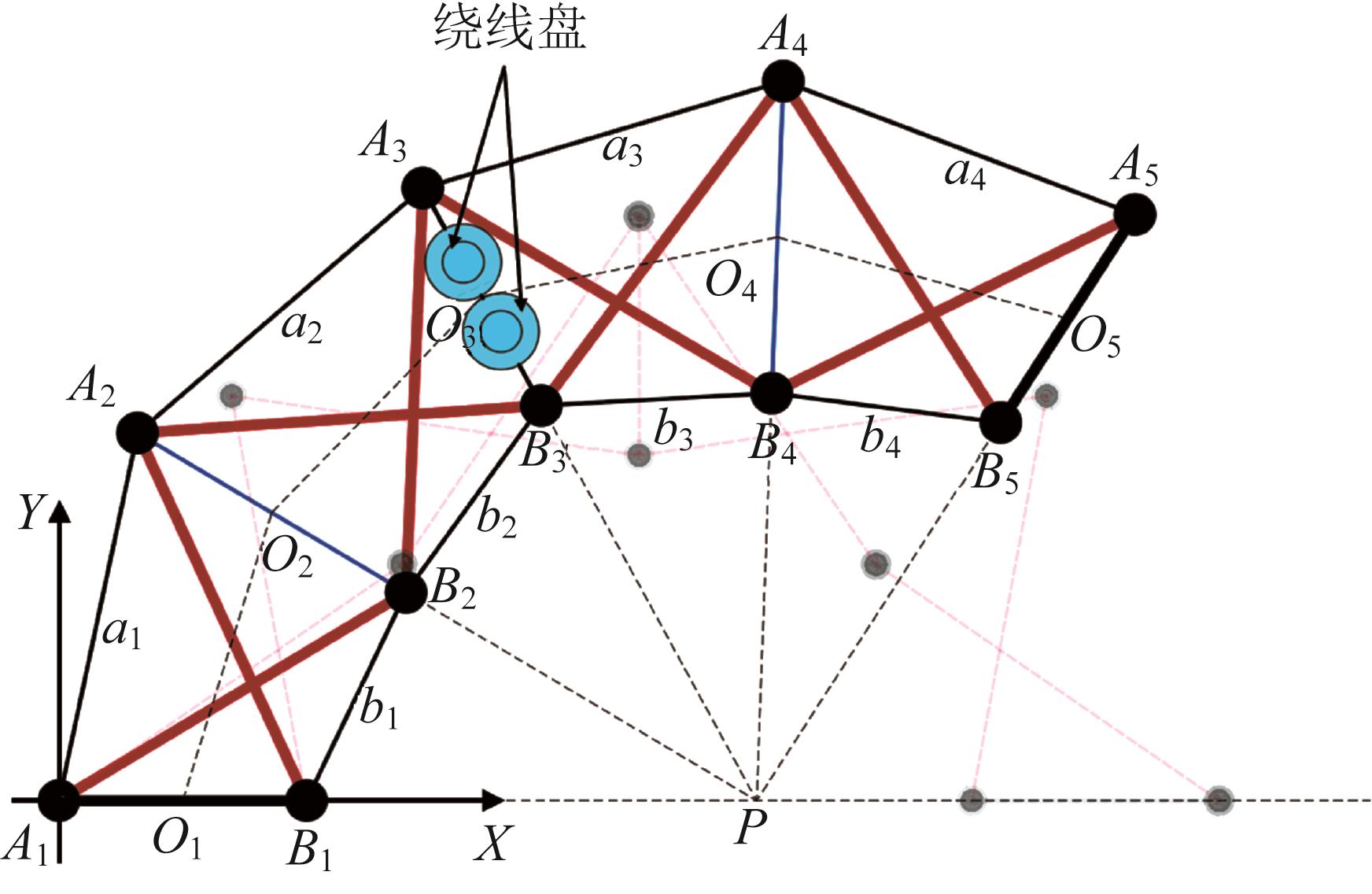
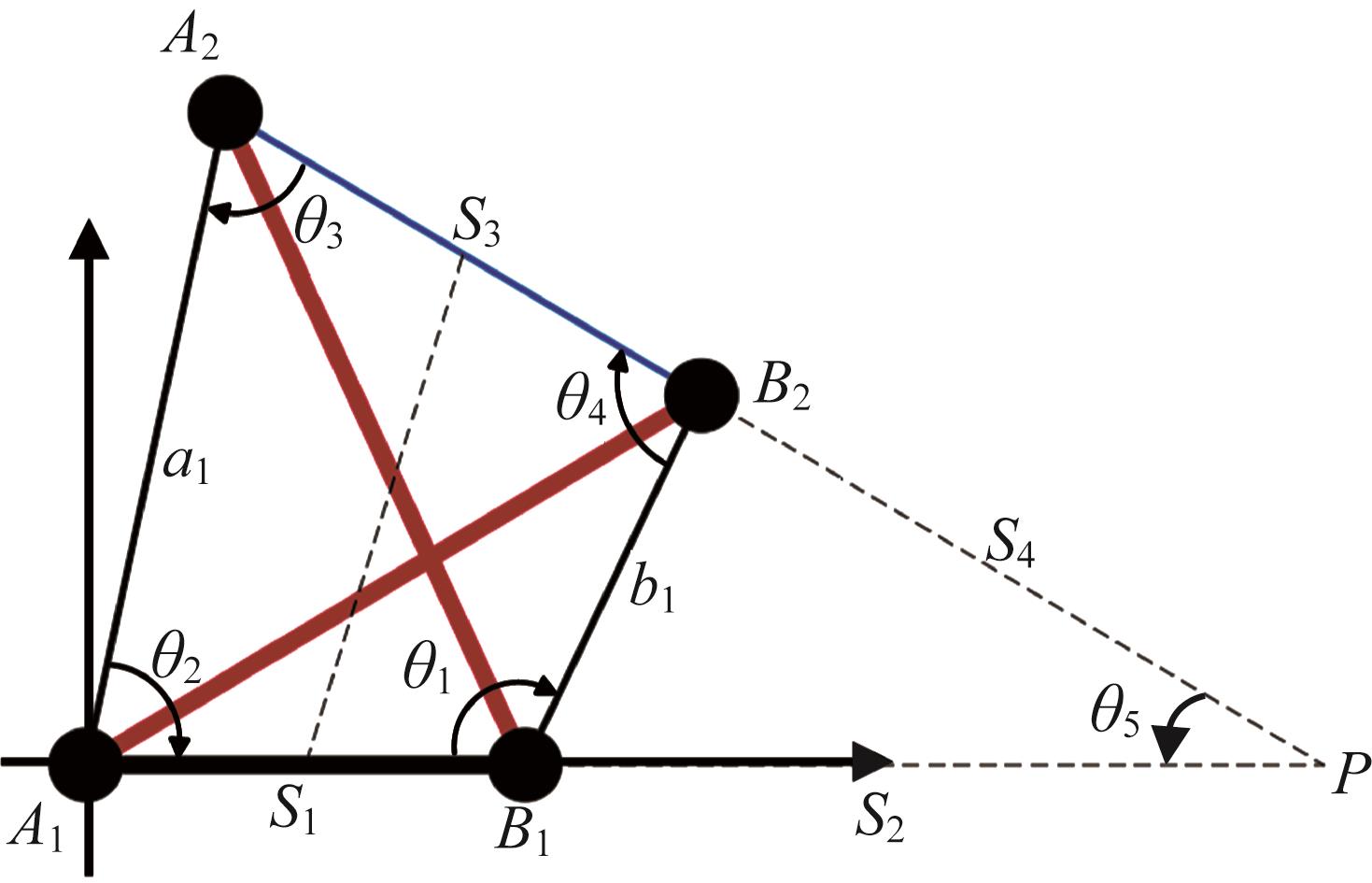
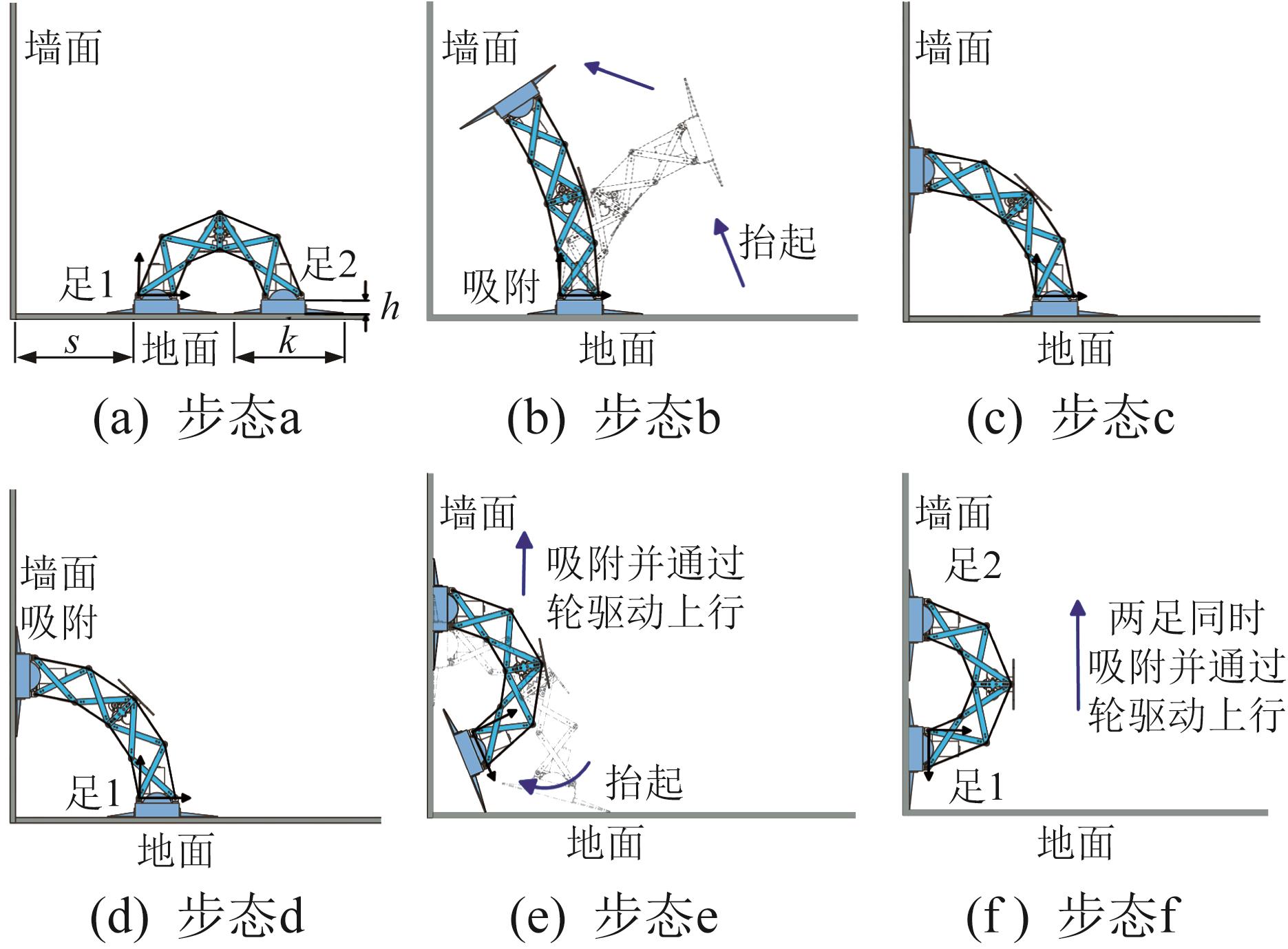
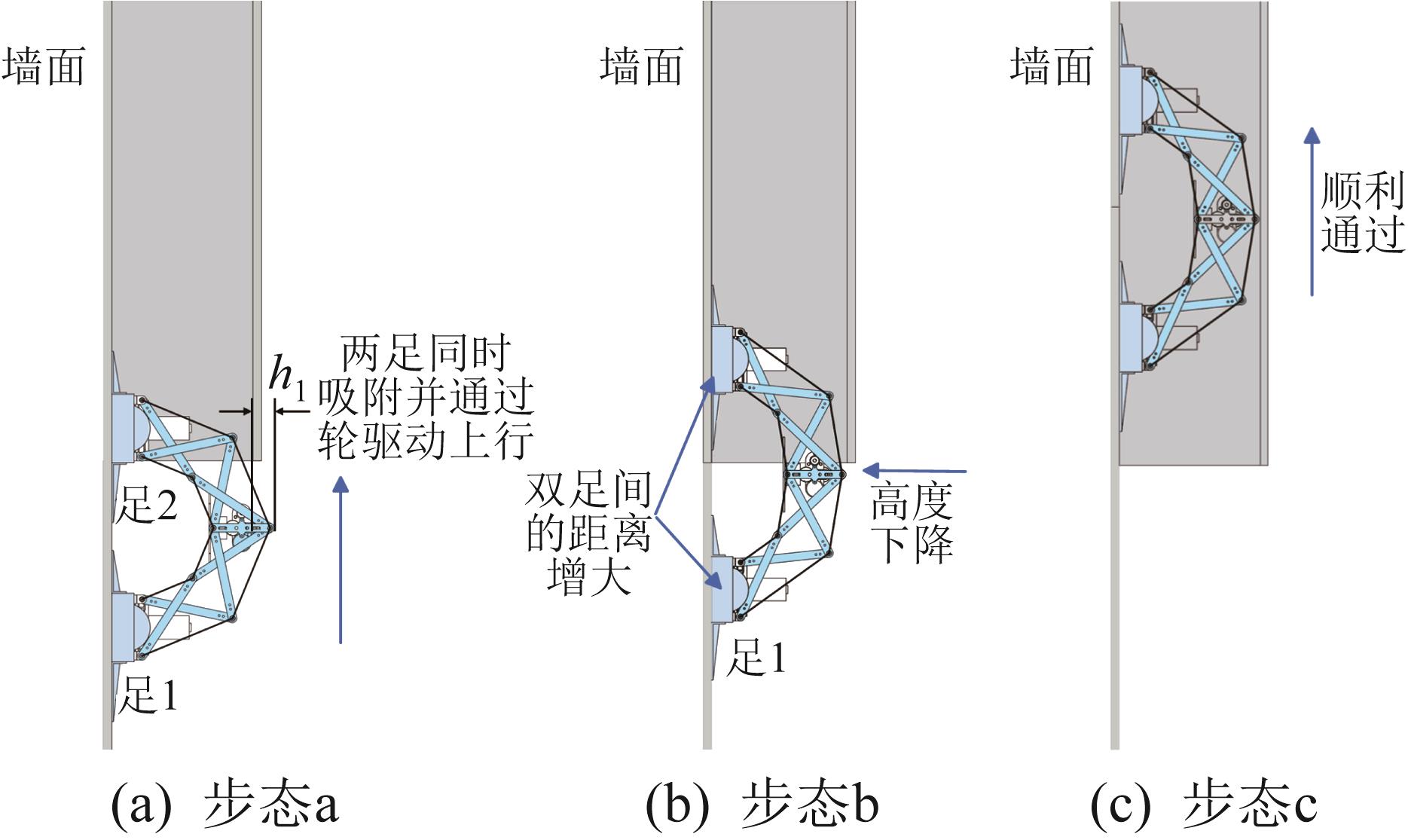
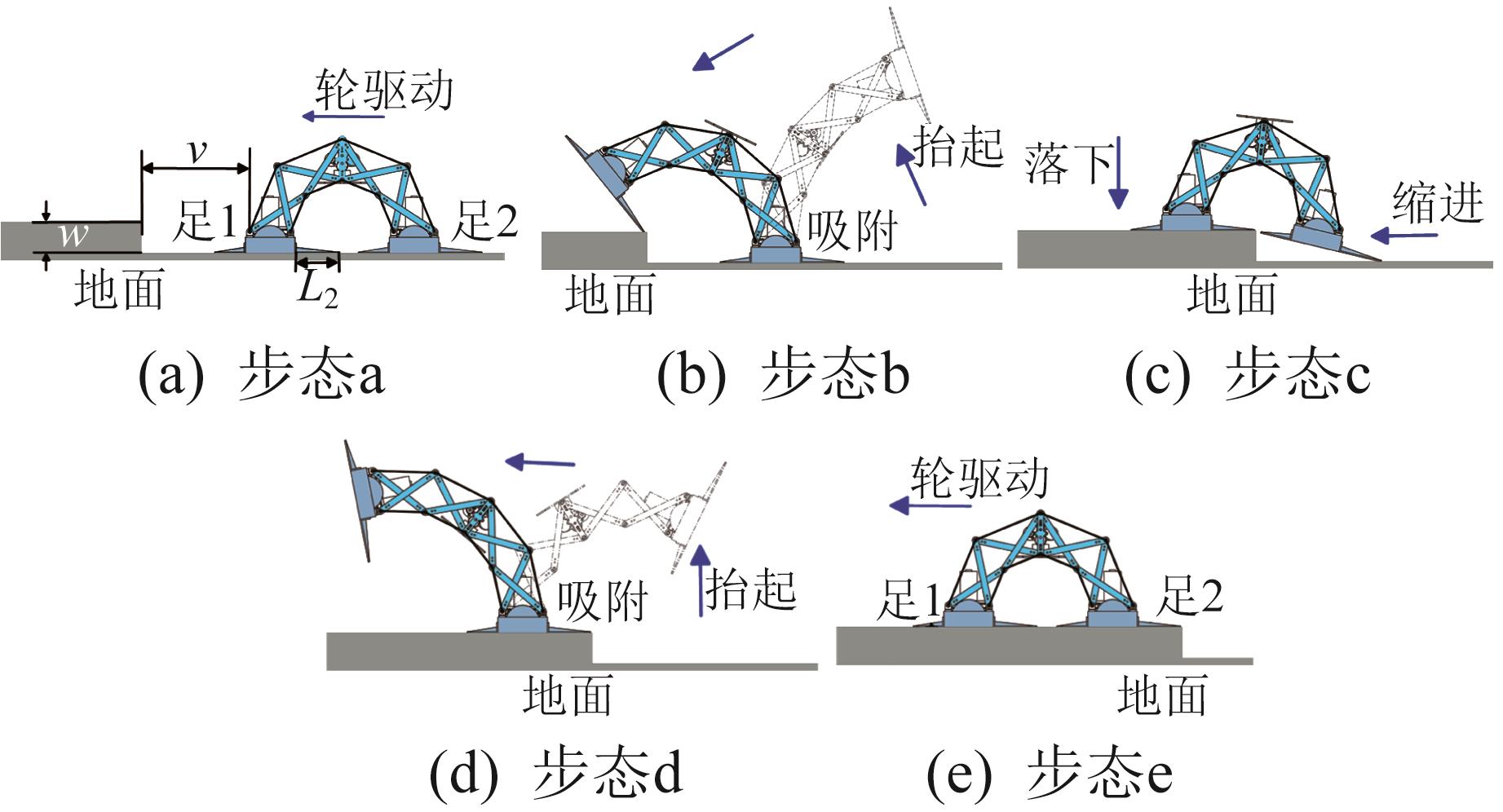
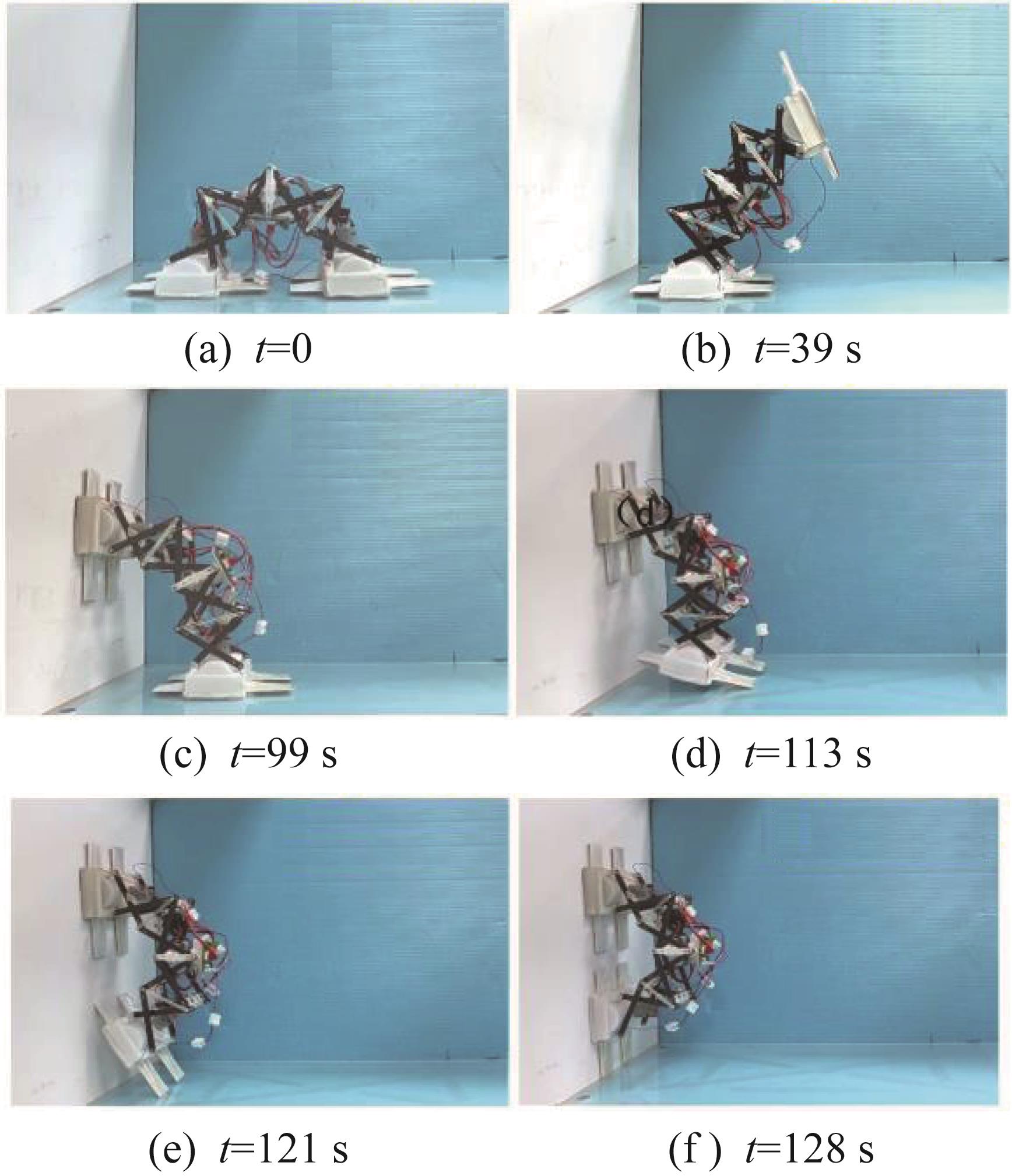
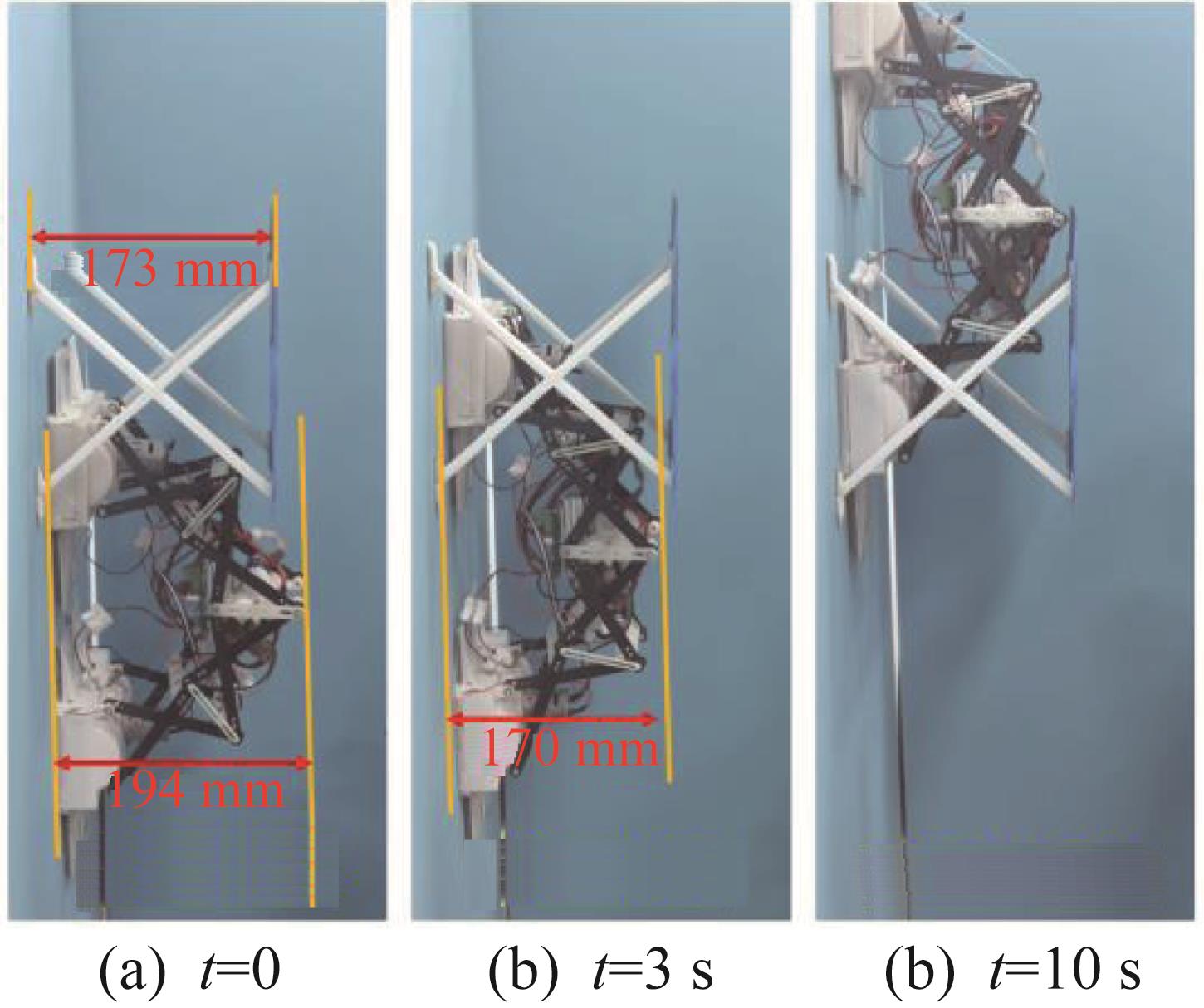
Abstract Mobile robots can replace people into dangerous environments such as fire and earthquake sites for terrain exploration and casualty search, but most robots are difficult to adapt to obstacles, right-angle walls, wall transitions and other complex terrain at the same time, and their control systems are relatively complex, requiring external energy input. Therefore, a deformable mobile robot with multiple functions, relatively simple control and no tethering was designed. Firstly, taking the 2-bar 4-cable tensioning integral structure as the basic unit, the body of the tensioning integral structure which could realize bending deformation was designed. Secondly, based on the analysis of adsorption force and structural parameters, the negative pressure adsorption device was designed and combined with the deformable body to form the overall structure of the robot. Then, the kinematic analysis of the robot was carried out, and the mapping relationship between the robot pose and the motor angle was obtained. Based on this, the robot's gaits of wall surface transition, traversing the narrow space from the wall surface and flipping up steps were planned. Finally, the robot prototype was developed, and the robot movement experiments were carried out according to different terrain, and the rationality of the robot gait planning was verified. The research results provide a certain reference value for the design and manufacture of multi-functional mobile robots.
|
|
Received: 15 March 2024
Published: 26 August 2024
|
|
|
|
Corresponding Authors:
Binbin LIAN
E-mail: 1056801740@qq.com;lianbinbin@tju.edu.cn
|
基于张拉整体结构的可变形移动机器人的设计与实验研究
移动机器人可以代替人进入火灾、地震现场等高危环境进行地形探索及伤员搜寻等工作,然而大多数机器人难以同时适应障碍、直角墙壁、墙面过渡等多种复杂地形,且其控制系统相对复杂,需要外部能源输入。为此,设计了一款具有多种功能、控制相对简单且无系留的可变形移动机器人。首先,将二杆四索张拉整体结构作为基本单元,设计了可实现弯曲变形的张拉整体结构躯干;其次,基于吸附力及结构参数的分析,设计了负压吸附装置,并将它与可变形躯干结合,形成了机器人整体结构;接着,对机器人进行运动学分析,获得了机器人位姿与电机转角的映射关系,并据此规划了机器人墙面过渡、从墙面穿越狭小空间及翻转上台阶的步态;最后,完成了机器人样机的研制,并针对不同地形开展了机器人运动实验,验证了机器人步态规划的合理性。研究结果为多功能移动机器人的设计与制造提供了一定的参考价值。
关键词:
张拉整体结构,
负压吸附,
可变形机器人
|
|
| [12] |
黄龙,张卫华,陈今茂,等. 爬壁机器人的研究现状与发展趋势[J].机械工程与技术,2021,10(3):345-363. doi:10.12677/met.2021.103040
HUANG L, ZHANG W H, CHEN J M, et al. A review and trend of wall-climbing robots[J]. Mechanical Engineering and Technology, 2021, 10(3): 345-363.
doi: 10.12677/met.2021.103040
|
|
|
| [1] |
王洋,张小俊,张明路,等.可自适应变曲率立面的分体柔性爬壁机器人设计与分析[J].机械工程学报,2021,57(3):49-58. doi:10.3901/jme.2021.03.049
WANG Y, ZHANG X J, ZHANG M L, et al. Design and analysis of split-flexible wall-climbing robot with adaptive variable curvature facade[J]. Journal of Mechanical Engineering, 2021, 57(3): 49-58.
doi: 10.3901/jme.2021.03.049
|
|
|
| [2] |
GUO W, ZHONG M, LI M, et al. Design of a six legged wall-climbing robot[C]//2008 IEEE Workshop on Advanced Robotics and Its Social Impacts, Taipei, Taiwan, China, Oct. 17, 2008.
|
|
|
| [3] |
杨春,罗天洪. 一种新型爬壁机器人越障过程的运动及动力学分析[J].机械传动,2019,43(9):87-92,95.doi:10.16578/j.issn.1004.2539.2019.09.014 .
YANG C, LUO T H. Kinematics and dynamics analysis of obstacle negotiation process for a novel climbing robot[J]. Journal of Mechanical Transmission, 2019,43(9):87-92, 95.
doi: 10.16578/j.issn.1004.2539.2019.09.014
|
|
|
| [4] |
刘彦伟,王李梦,刘三娃,等. 一种仿尺蠖爬壁机器人设计与分析[J].机械传动,2019,43(8):87-91.doi:10.16578/j.issn.1004.2539.2019.08.016 .
LIU Y W, WANG L M, LIU S W, et al. Design and analysis of an inchworm-inspired wall-climbing robot[J]. Journal of Mechanical Transmission, 2019, 43(8): 87-91.
doi: 10.16578/j.issn.1004.2539.2019.08.016
|
|
|
| [5] |
栗晋杰. 灾害现场环境下被动自适应机器人运动学分析[D].天津:河北工业大学,2014.
LI J J. Passive adaptive robot kinematics analysis under the disaster site circumstance[D]. Tianjin: Hebei University of Technology, 2014.
|
|
|
| [6] |
肖世贵,章亚男,沈林勇,等. 一种双体负压吸附爬壁机器人的研究[J].工业控制计算机,2018,31(6):85-87. doi:10.3969/j.issn.1001-182X.2018.06.036
XIAO S G, ZHANG Y N, SHEN L Y, et al. Research on a twin-body negative pressure wall-climbing robot[J]. Industrial Control Computer, 2018, 31(6): 85-87.
doi: 10.3969/j.issn.1001-182X.2018.06.036
|
|
|
| [7] |
FURUYA H. Concept of deployable tensegrity structures in space application[J]. International Journal of Space Structures, 1992, 7(2): 143-151.
|
|
|
| [8] |
SHIBATA M, HIRAI S. Rolling Locomotion of deformable tensegrity structure[EB/OL].[2024-03-07]..
|
|
|
| [9] |
CHUNG Y S, LEE J H, JANG J H, et al. Jumping tensegrity robot based on torsionally pre-strained SMA springs[J]. ACS Applied Materials & Interfaces, 2019, 11(43): 40793-40799.
|
|
|
| [10] |
BÖHM V, ZIMMERMANN K. Vibration-driven mobile robots based on single actuated tensegrity structures[C]//IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, May 6, 2013.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|