| Modeling, Simulation, Analysis and Decision |
|

|
|
|
| Kinematics analysis and validation of 3-PUU parallel mechanism |
Mingfang CHEN( ),Liangen HUANG,Yongxia ZHANG,Guoyi YAO ),Liangen HUANG,Yongxia ZHANG,Guoyi YAO |
| Faculty of Mechanical and Electrical Engineering, Kunming University of Science and Technology, Kunming 650500, China |
|
|
|
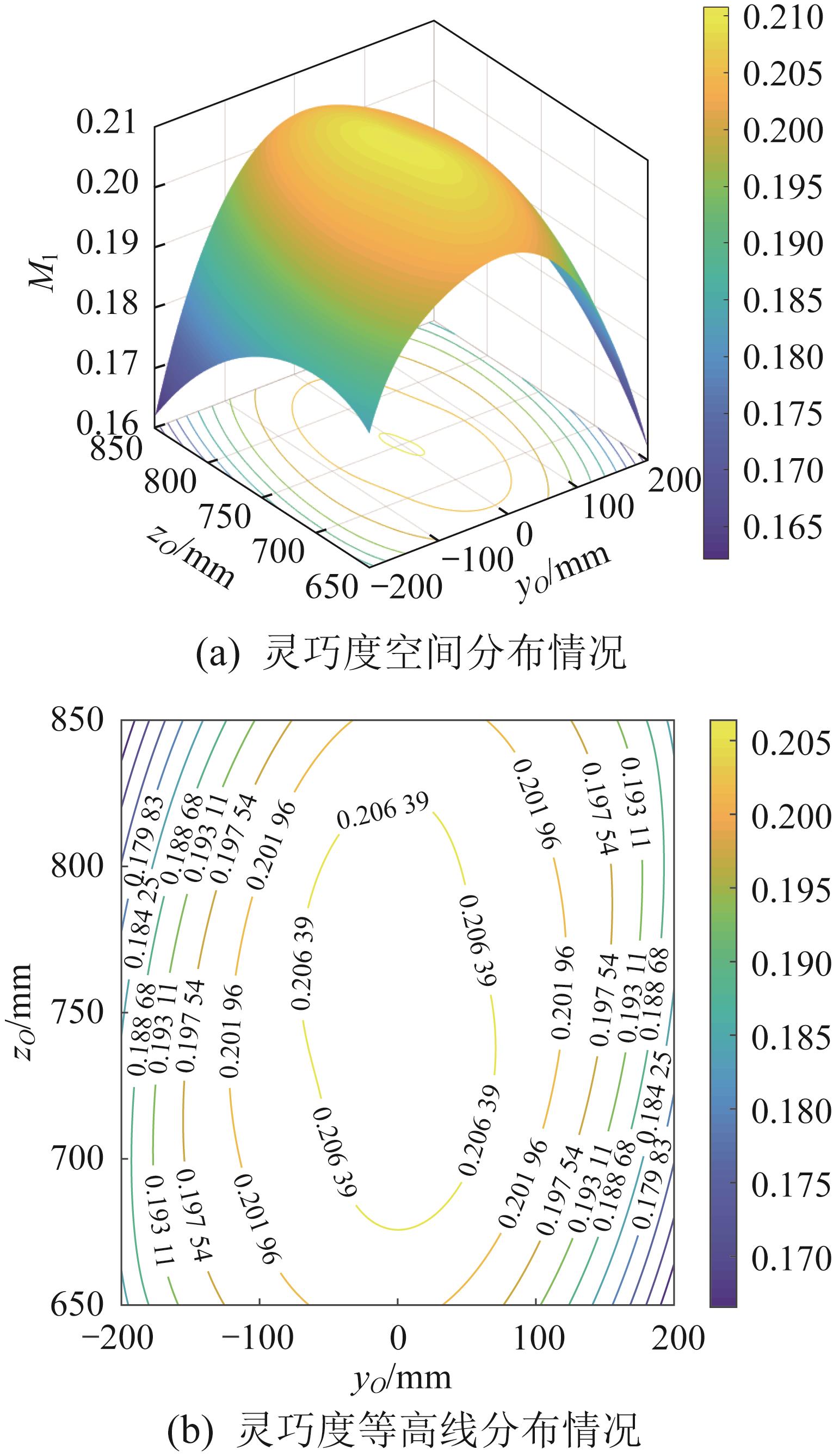
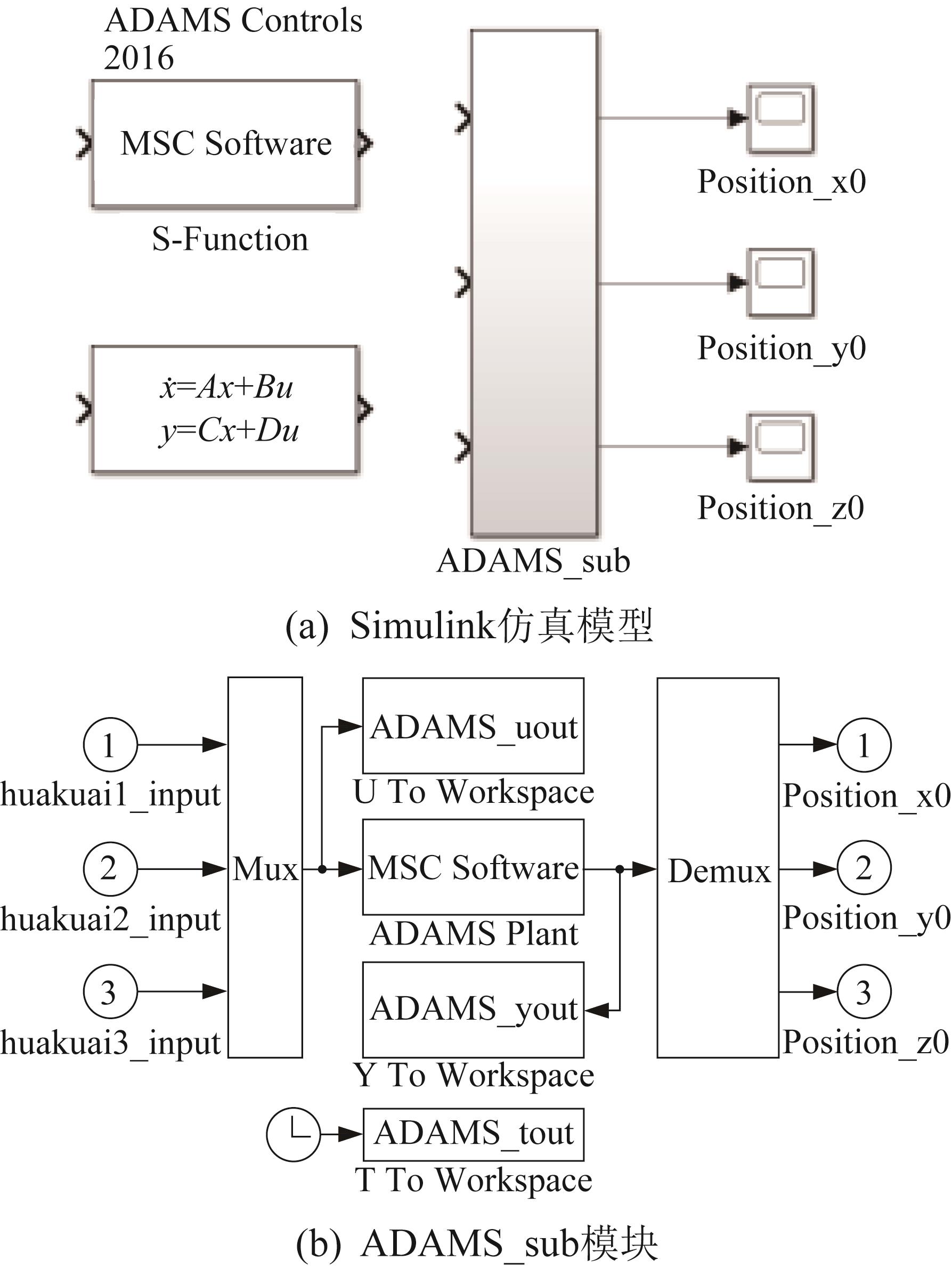
Abstract In order to improve the efficiency and accuracy of the design of parallel mechanisms with few degrees of freedom, the theoretical analysis and experimental research were conducted on a self-designed 3-PUU parallel mechanism. Firstly, the degree of freedom of the parallel mechanism was analyzed by using the screw theory and the modified Kutzbach-Grubler formula. At the same time, the forward and inverse kinematics solutions and Jacobian matrix of the parallel mechanism were solved, and its constraint singularity and kinematic singularity were analyzed based on the Jacobian matrix. Then, the workspace of the parallel mechanism was analyzed by using the limit boundary search method, and the global dexterity was constructed by taking the reciprocal of Jacobian matrix condition number as the local dexterity, so as to analyze the kinematic performance of the parallel mechanism. Next, an ADAMS/Simulink co-simulation model of the parallel mechanism was built. Based on the given motion equation of the moving platform, the simulation curves and error curves of the moving platform position were obtained through simulation. Finally, the experimental platform was built by using the parallel mechanism prototype, PC (personal computer), STM32 microcontroller, servo motor and laser tracker, and the position curves of the moving platform were measured. The results showed that the parallel mechanism had a large reachable workspace and good kinematic performance. By comparing theoretical results with simulation results, it could be concluded that the constructed kinematics model of the parallel mechanism was correct. There were some errors between the measured and theoretical values of the moving platform position, mainly due to the mechanical errors of the parallel mechanism and the insufficient precision of the control system. However, the variation trends of the measured curve and the theoretical curve were basically consistent, which further verified the correctness of the kinematics model of the parallel mechanism. The research results can provide reference for the design of parallel mechanisms with few degrees of freedom.
|
|
Received: 25 April 2023
Published: 02 January 2024
|
|
|
3-PUU并联机构的运动学分析与验证
为提升少自由度并联机构设计的效率和准确性,针对自主设计的3-PUU并联机构进行了理论分析和实验研究。首先,利用螺旋理论和修正的Kutzbach-Grubler公式分析了并联机构的自由度;同时,解算了并联机构的运动学正反解和雅可比矩阵,并基于雅可比矩阵分析了其约束奇异和运动奇异。然后,利用极限边界搜索法分析了并联机构的工作空间,并以雅可比矩阵条件数的倒数作为局部灵巧度来构造全局灵巧度,分析了并联机构的运动性能。接着,搭建了并联机构的ADAMS/Simulink联合仿真模型,基于给定的动平台运动方程,通过仿真得到了动平台位置的仿真曲线及误差曲线。最后,利用并联机构样机、PC(personal computer,个人计算机)、STM32单片机、伺服电机及激光跟踪仪搭建了实验平台,并测定了并联机构动平台的位置曲线。结果表明,该并联机构具有较大的可达工作空间且其运动性能较好;通过对比理论结果与仿真结果可知,所构建的并联机构运动学模型正确;动平台位置的实测值与理论值之间存在一定误差,主要原因是并联机构存在机械误差以及控制系统精度不足,但实测曲线与理论曲线的变化趋势基本一致,进一步验证了并联机构运动学模型的正确性。研究结果可为少自由度并联机构的设计提供参考。
关键词:
3-PUU并联机构,
运动学分析,
奇异性,
工作空间,
灵巧度,
ADAMS/Simulink仿真
|
|
| [1] |
陈聪.新型3-PUU并联机器人工作空间优化与运动学标定[D].重庆:重庆大学,2018:1-3.
CHEN C. Workspace optimization and kinematic calibr-ation of a new 3-PUU parallel robot[D]. Chongqing: Chongqing University, 2018: 1-3.
|
|
|
| [2] |
朱伟,顾开荣,王传伟,等.一种3T1R并联机构设计及运动学性能分析[J].中国机械工程,2018,29(1):14-21. doi:10.3969/j.issn.1004-132X.2018.01.003
ZHU W, GU K R, WANG C W, et al. Design and kinematics performance analysis of a 3T1R parallel mechanism [J]. China Mechanical Engineering, 2018, 29(1): 14-21.
doi: 10.3969/j.issn.1004-132X.2018.01.003
|
|
|
| [3] |
李菊,朱忠颀,沈惠平,等.三平移并联机构拓扑设计与运动学分析[J].农业机械学报,2022,53(9):425-433. doi:10.6041/j.issn.1000-1298.2022.09.044
LI J, ZHU Z Q, SHEN H P, et al. Topological design and kinematic analysis of novel three-translation parallel mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(9): 425-433.
doi: 10.6041/j.issn.1000-1298.2022.09.044
|
|
|
| [4] |
王世杰,冯伟,李铁军,等.空间2自由度冗余驱动并联机构运动学性能分析[J].机械工程学报,2022,58(23):18-27. doi:10.3901/jme.2022.23.018
WANG S J, FENG W, LI T J, et al. Kinematic performance analysis of spatial 2-DOF redundantly actuated parallel manipulator[J]. Journal of Mechanical Engineering, 2022, 58(23):18-27.
doi: 10.3901/jme.2022.23.018
|
|
|
| [5] |
刘骏豪.3-PUU并联机器人机构误差及弹性动力学研究[D].重庆:重庆大学,2019:6-7.
LIU J H. Mechanism error and elastodynamic study of 3-PUU parallel robot[D]. Chongqing: Chongqing University, 2019: 6-7.
|
|
|
| [6] |
赵磊,闫照方,栾倩倩,等.大空间运动3-RRRU并联机器人运动学标定与误差分析[J].农业机械学报,2021,52(11):411-420. doi:10.6041/j.issn.1000-1298.2021.11.045
ZHAO L, YAN Z F, LUAN Q Q, et al. Kinematic calibration and error analysis of 3-RRRU parallel robot in large overall motion[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(11): 411-420.
doi: 10.6041/j.issn.1000-1298.2021.11.045
|
|
|
| [7] |
周毅钧,傅敏,郑小东.3-SPS/PPS并联机构运动学分析[J].科学技术与工程,2021,21(1):152-157.
ZHOU Y J, FU M, ZHENG X D. Kinematics analysis of 3-SPS/PPS parallel mechanism [J]. Science Technology and Engineering, 2021, 21(1): 152-157.
|
|
|
| [8] |
FERNANDES J J, SELVAKUMAR A A. Kinematic and dynamic analysis of 3PUU parallel manipulator for medical applications[J]. Procedia Computer Science, 2018, 133: 604-611.
|
|
|
| [9] |
LASKI P A, TAKOSOGLU J E, BLASIAK S. Design of a 3-DOF tripod electro pneumatic parallel manipulator[J]. Robotics and Autonomous Systems, 2015, 72: 59-70.
|
|
|
| [10] |
孟庆梅,李佳宇,李菊,等.半对称三平移Delta-CU并联机构运动误差分析与标定[J].农业机械学报,2021,52(1):393-400. doi:10.6041/j.issn.1000-1298.2021.01.044
MENG Q M, LI J Y, LI J, et al. Error modeling analysis and calibration of semi-symmetrical three-translation Delta-CU parallel mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(1): 393-400.
doi: 10.6041/j.issn.1000-1298.2021.01.044
|
|
|
| [11] |
李菊,肖思进,沈惠平,等.两支链三平移并联机构动力学分析与性能优化[J].农业机械学报,2022,53(10):412-422.
LI J, XIAO S J, SHEN H P, et al. Dynamics analysis and performance optimization of two-chain and three-translation parallel mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(10): 412-422.
|
|
|
| [12] |
冯李航,张为公,龚宗洋,等.Delta系列并联机器人研究进展与现状[J].机器人,2014,36(3):375-384.
FENG L H, ZHANG W G, GONG Z Y, et al. Developments of Delta-like parallel manipulators: a review[J]. Robot, 2014, 36(3): 375-384.
|
|
|
| [13] |
丁培燎. Delta并联机器人运动学分析与控制系统研究[D].太原:中北大学,2022:5-6.
DING P L. Research on kinematics analysis and control system of Delta parallel robot[D]. Taiyuan: North University of China, 2022: 5-6.
|
|
|
| [14] |
CHUNG J, LEE S H, YI B J, et al. Implementation of a foldable 3-DOF master device to a glass window panel fitting task[J]. Automation in Construction, 2010, 19(7): 855-866.
|
|
|
| [15] |
DASGUPTA B, MRUTHYUNJAYA S. A Newton-Euler formation for the inverse dynamics of the Stewart platform manipulator[J]. Mechanism and Machine Theory, 1998, 33(8): 1135-1152.
|
|
|
| [16] |
INNOCENTI C, PARENTI C P. Direct position analysis of the Stewart platform mechanism[J]. Mechanism and Machine Theory, 1990, 25(6): 611-621.
|
|
|
| [17] |
张树梅,邓子龙,高兴军.基于改进粒子群算法的6-PTRT并联机器人运动学研究[J].制造业自动化,2020,42(4):65-68. doi:10.3969/j.issn.1009-0134.2020.04.016
ZHANG S M, DENG Z L, GAO X J. Kinematics study of 6-PTRT parallel robot based on improved particle swarm optimization[J]. Manufacturing Automation, 2020, 42(4): 65-68.
doi: 10.3969/j.issn.1009-0134.2020.04.016
|
|
|
| [18] |
刘秀莹,张建军,刘承磊,等.基于工作空间的踝关节康复广义球面并联机器人运动学参数优化[J].中国机械工程,2021,32(16):1921-1929. doi:10.3969/j.issn.1004-132X.2021.16.004
LIU X Y, ZHANG J J, LIU C L, et al. Kinematic parameter optimization of workspace-based generalized spherical parallel robots for ankle joint rehabilitation[J]. China Mechanical Engineering, 2021, 32(16): 1921-1929.
doi: 10.3969/j.issn.1004-132X.2021.16.004
|
|
|
| [19] |
ZENEBE K Z. Formulation of a generalized Jacobian and inverse acceleration analysis of a linear Delta manipulator based on reciprocal screws method[J]. International Journal of Engineering Research and Technology, 2013, 2(2): 1-9.
|
|
|
| [20] |
吴金波,韩鹏.一平动两转动3-UPU并联机构奇异性分析[J].机械科学与技术,2016,35(9):1313-1317. doi:10.13433/j.cnki.1003-8728.2016.0901
WU J B, HAN P. Singularity analysis of a 3-UPU parallel manipulator with one translation and two rotations[J]. Mechanical Science and Technology for Aerospace Engineering, 2016, 35(9): 1313-1317.
doi: 10.13433/j.cnki.1003-8728.2016.0901
|
|
|
| [21] |
MERLET J P. Parallel robots[M]. 2nd ed. Dordrecht: Springer, 2005: 179-211.
|
|
|
| [22] |
黄胜军,刘宏昭.一种冗余驱动并联机构的设计与奇异性分析[J].机械科学与技术,2017,36(7):998-1004. doi:10.13433/j.cnki.1003-8728.2017.0703
HUANG S J, LIU H Z. Structure synthesis and singularity analysis of a novel redundantly actuated parallel mechanism[J]. Mechanical Science and Technology for Aerospace Engineering, 2017, 36(7): 998-1004.
doi: 10.13433/j.cnki.1003-8728.2017.0703
|
|
|
| [23] |
宛宇,张春燕,朱锦翊,等.基于螺旋理论的多模式移动3-RSR并联机构奇异性分析[J].轻工学报,2020,35(3):88-98. doi:10.12187/2020.03.011
WAN Y, ZHANG C Y, ZHU J Y, et al. Singularity analysis of multi-mode mobile 3-RSR parallel mechanism based on screw theory[J]. Journal of Light Industry, 2020, 35(3): 88-98.
doi: 10.12187/2020.03.011
|
|
|
| [24] |
田海波,马宏伟,马琨,等.一种三构态变胞并联机构运动学及工作空间分析[J].机器人,2019,41(3):414-424.
TIAN H B, MA H W, MA K, et al. Kinematics and workspace analysis of a metamorphic parallel mechanism with three configurations[J]. Robot, 2019, 41(3): 414-424.
|
|
|
| [25] |
程颖,杨德华,吴常铖,等.新型六自由度微动并联机构的工作空间分析[J].机械科学与技术,2019,38(3):433-439.
CHENG Y, YANG D H, WU C C, et al. Workspace analysis of a novel six DOFs parallel mechanism with micro displacement[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(3): 433-439.
|
|
|
| [26] |
郑鑫,杜力,车林仙,等.2PRPaU-2PSS并联机构运动学分析[J].机械传动,2022,46(11):47-54.
ZHENG X, DU L, CHE L X, et al. Kinematics analysis of 2PRPaU-2PSS parallel mechanism[J]. Journal of Mechanical Transmission, 2022, 46(11): 47-54.
|
|
|
| [27] |
张建伟.面向对称三自由度并联机构的运动学分析软件设计与开发[D].秦皇岛:燕山大学,2020:32-35.
ZHANG J W. Design and development for kinematics analysis software of symmetrical 3-DOF parallel mechanism [D]. Qinhuangdao: Yanshan University, 2020: 32-35.
|
|
|
| [28] |
王耀军,张海峰.基于自然正交补的冗余驱动并联机构动力学建模[J].机电工程,2022,39(10):1440-1447.
WANG Y J, ZHANG H F. Dynamics modeling of redundantly-actuated parallel robot based on natural orthogonal complement[J]. Journal of Mechanical & Electrical Engineering, 2022, 39(10): 1440-1447.
|
|
|
| [29] |
苟建平.4SPRR-SPR并联机器人运动学及工作空间分析[D].成都:四川大学,2021:64-65.
GOU J P. The research of 4SPRR-SPR parallel robot in kinematics and workspace analysis[D]. Chengdu: Sichuan University, 2021: 64-65.
|
|
|
| [30] |
李启腾.一种新型含子闭环并联机构的运动学分析及灵巧性研究[D].天津:河北工业大学,2018:45.
LI Q T. The kinematic analysis and the dexterity research of a novel parallel mechanism with sub closed-chains[D]. Tianjin: Hebei University of Technology, 2018: 45.
|
|
|
| [31] |
王庆峰,李虹,王新宇,等.2-SPR/RCU并联机构的运动性能与灵巧度分析[J].机械科学与技术,2021,40(8):1177-1185.
WANG Q F, LI H, WANG X Y, et al. Analysis on kinematic performance and dexterity of 2-SPR/RCU asymmetric parallel mechanism[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(8): 1177-1185.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|