In order to realize the multi-modal motion of continuum robotic arm and solve the problem that the existing robotic arm can only achieve single bending or rotation, a single-module multi-degree-of-freedom flexible continuum robotic arm based on rolling contact is designed. The rolling contact module was used as the skeleton structure of the bending module in the continuum robotic arm, and the rotating module was installed in the bending module to form a multi-degree-of-freedom robotic arm with independent bending and rotation motions. The kinematics model of the continuum robotic arm was established by the segmented constant curvature method, and its stiffness, bending and rotation properties were analyzed. A continuum robotic arm prototype was prepared, and experiments were carried out on the robotic arm to unscrew bottle caps, switch on the fan, and grasp the object by avoiding obstacles in the three-dimensional space. The experimental results showed that different tasks in complex spatial environment could be accomplished by the combined motion of bending and rotation, which reflected the advantages of the composite motion mode. The designed continuum robotic arm has multi-modal motion, which provides a new idea for the design of multi-degree-of-freedom continuum robotic arms and expands the application scenarios of continuum robotic arms.
Liang ZHOU,Tao WEN,Junfeng HU,Hao ZHOU. Design of single-module multi-degree-of-freedom flexible continuum robotic arm based on rolling contact. Chinese Journal of Engineering Design, 2024, 31(4): 473-482.
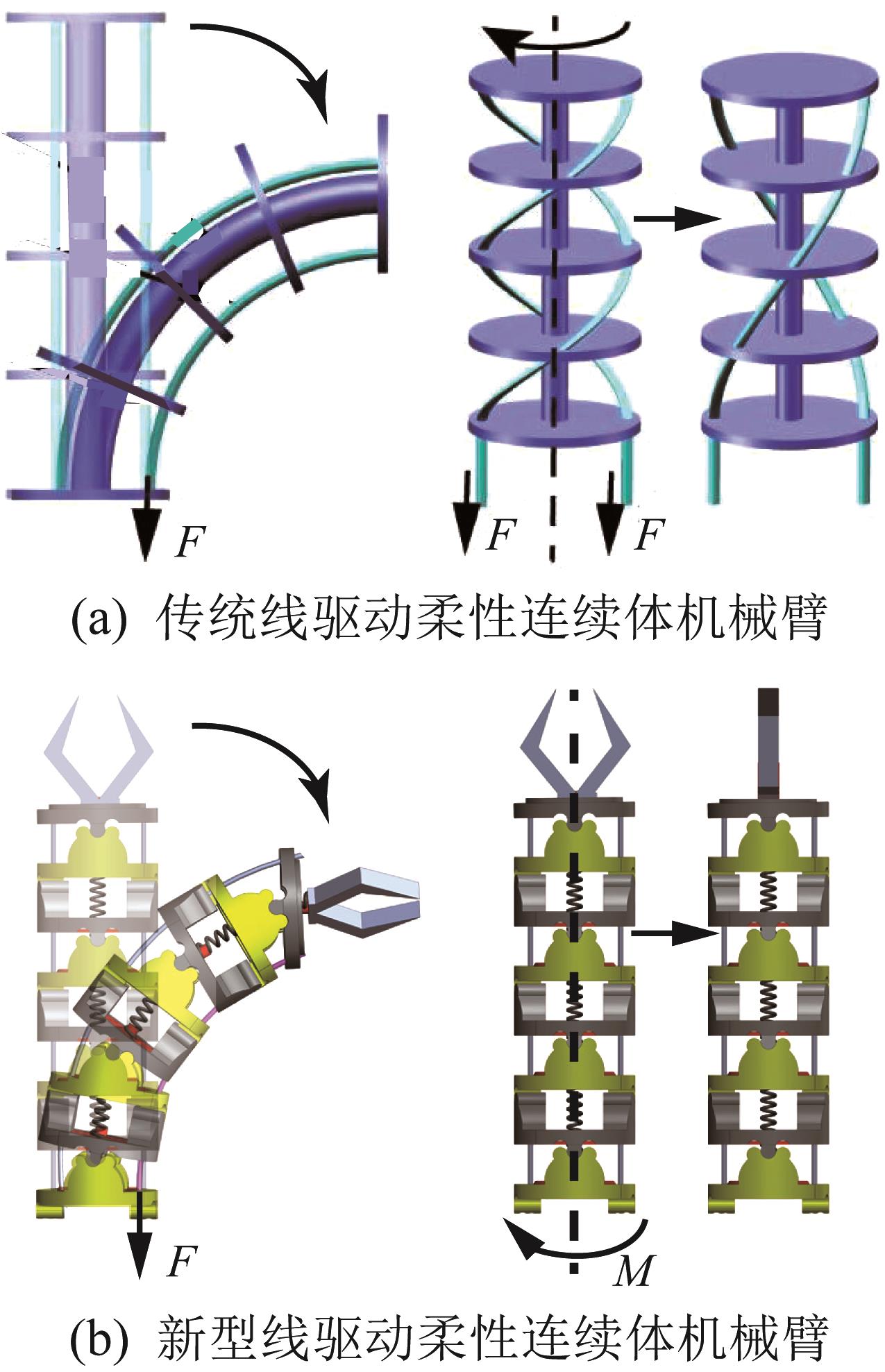
Fig.1 Structure comparison of linear driven flexible continuum robotic arms
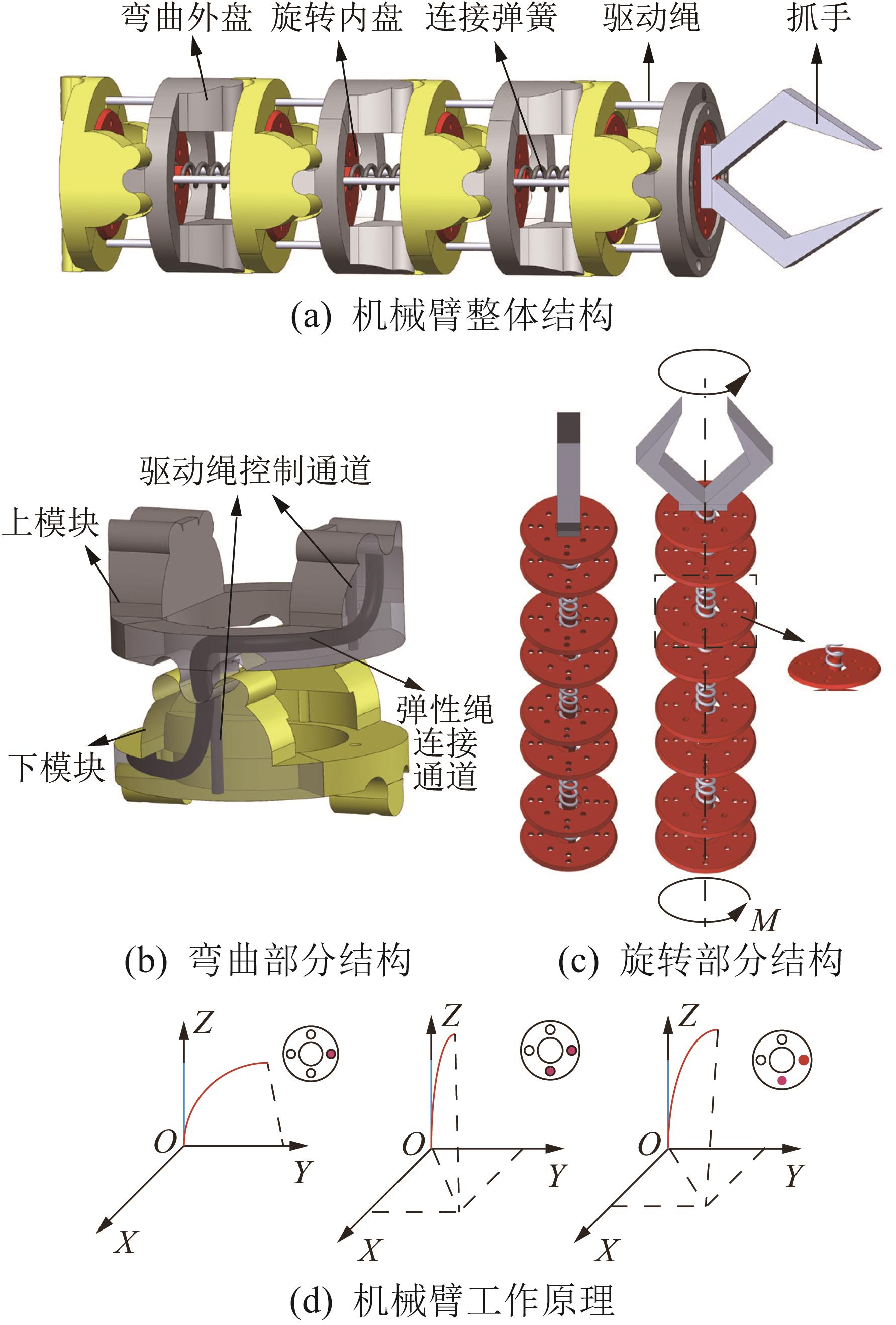
Fig.2 Single-module multi-degree-of-freedom flexible continuum robotic arm based on rolling contact
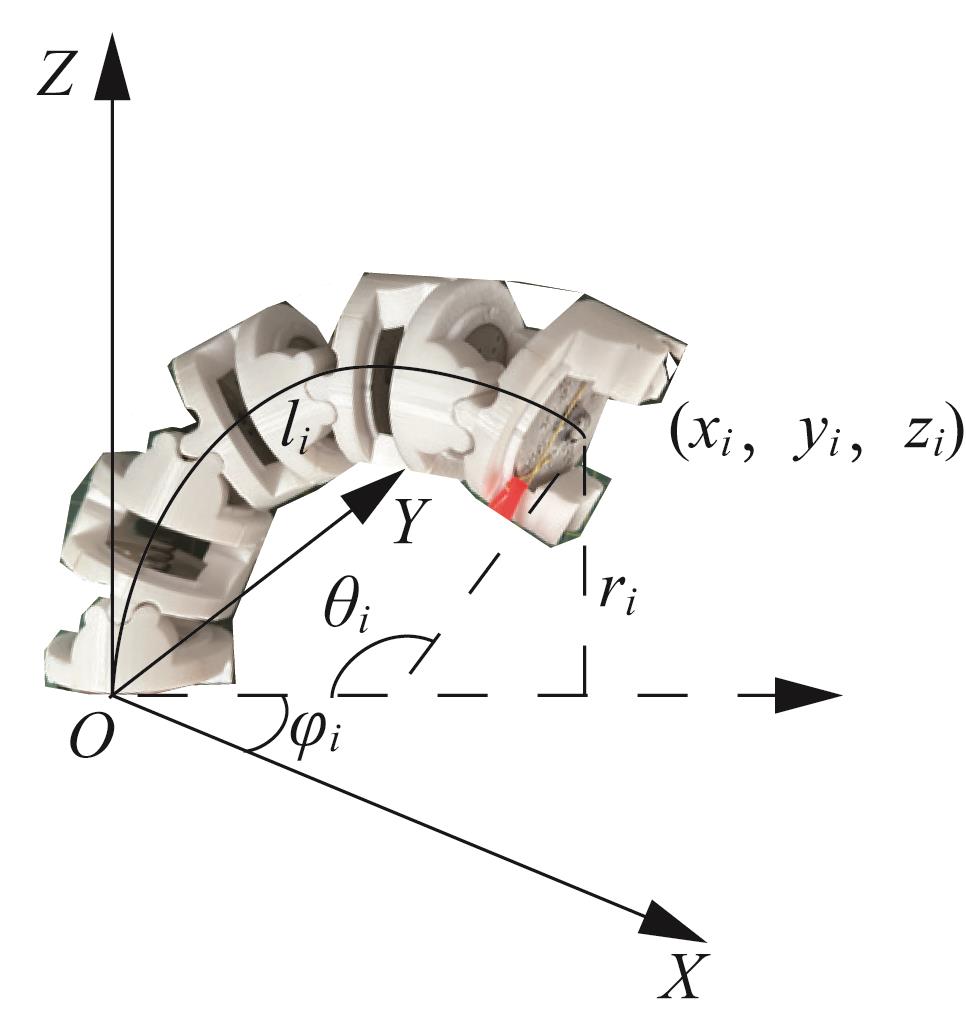
Fig.3 Schematic of pose of flexible continuum robotic arm
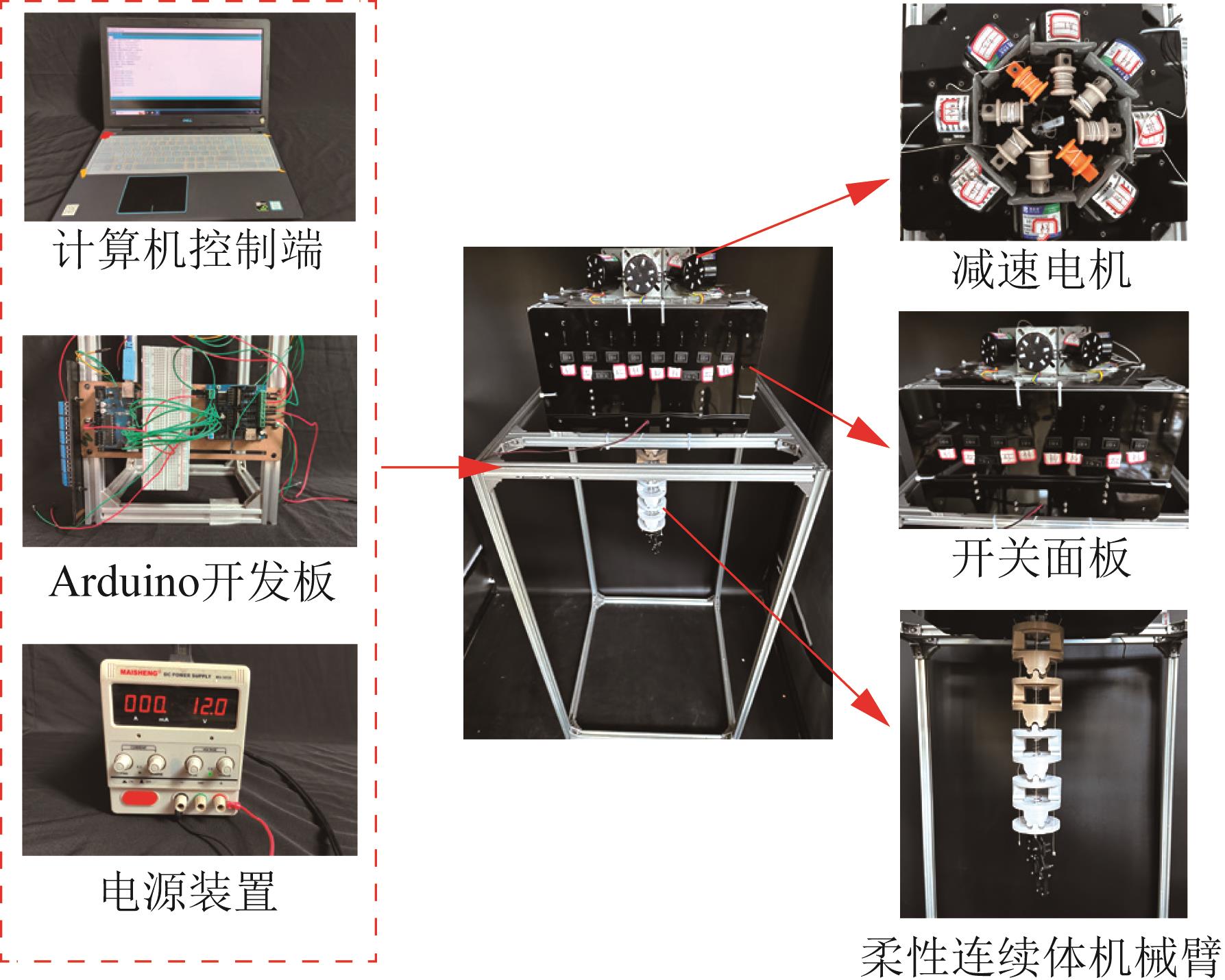
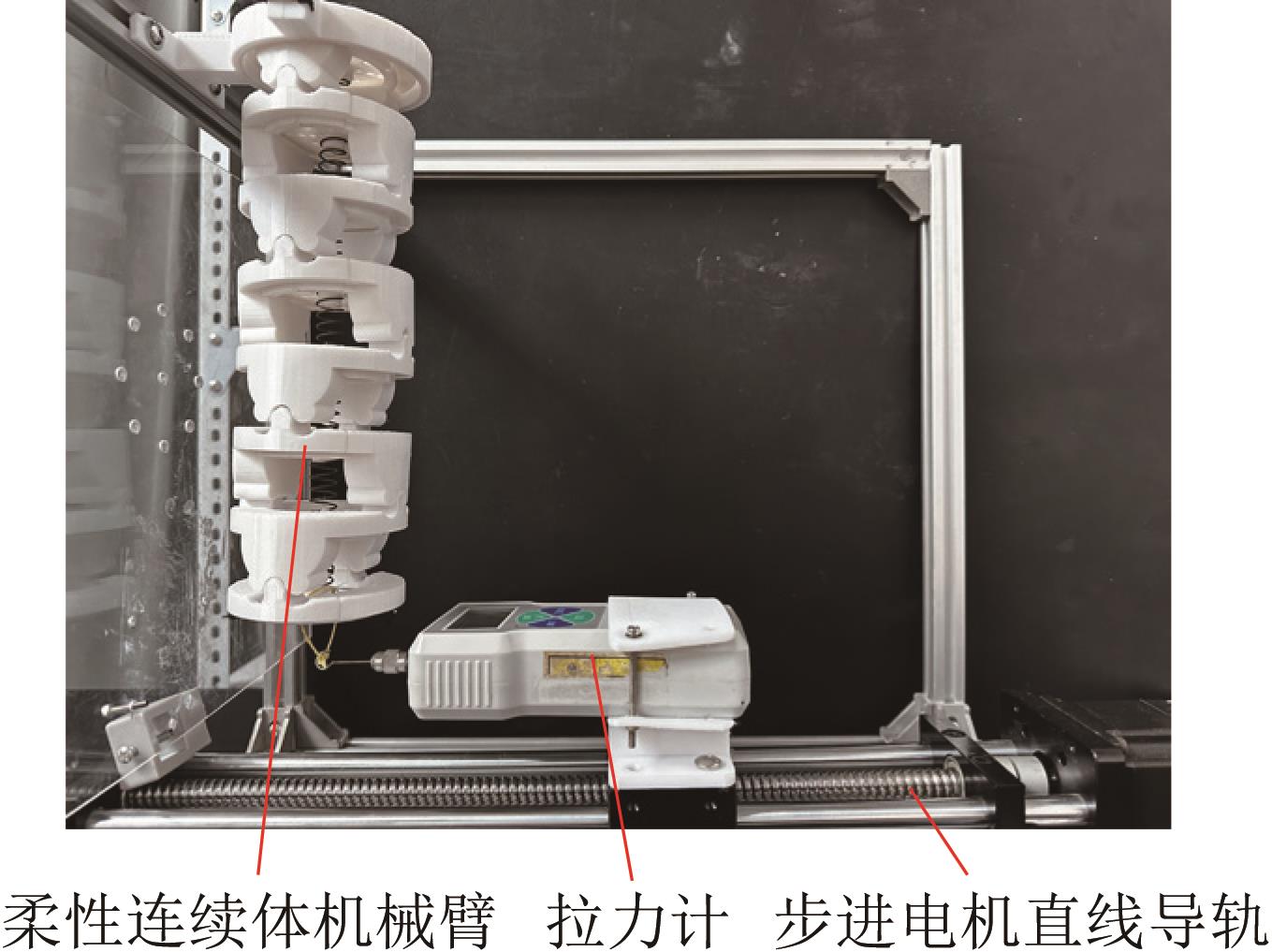
Fig.4 Experimental platform for flexible continuum robotic arm
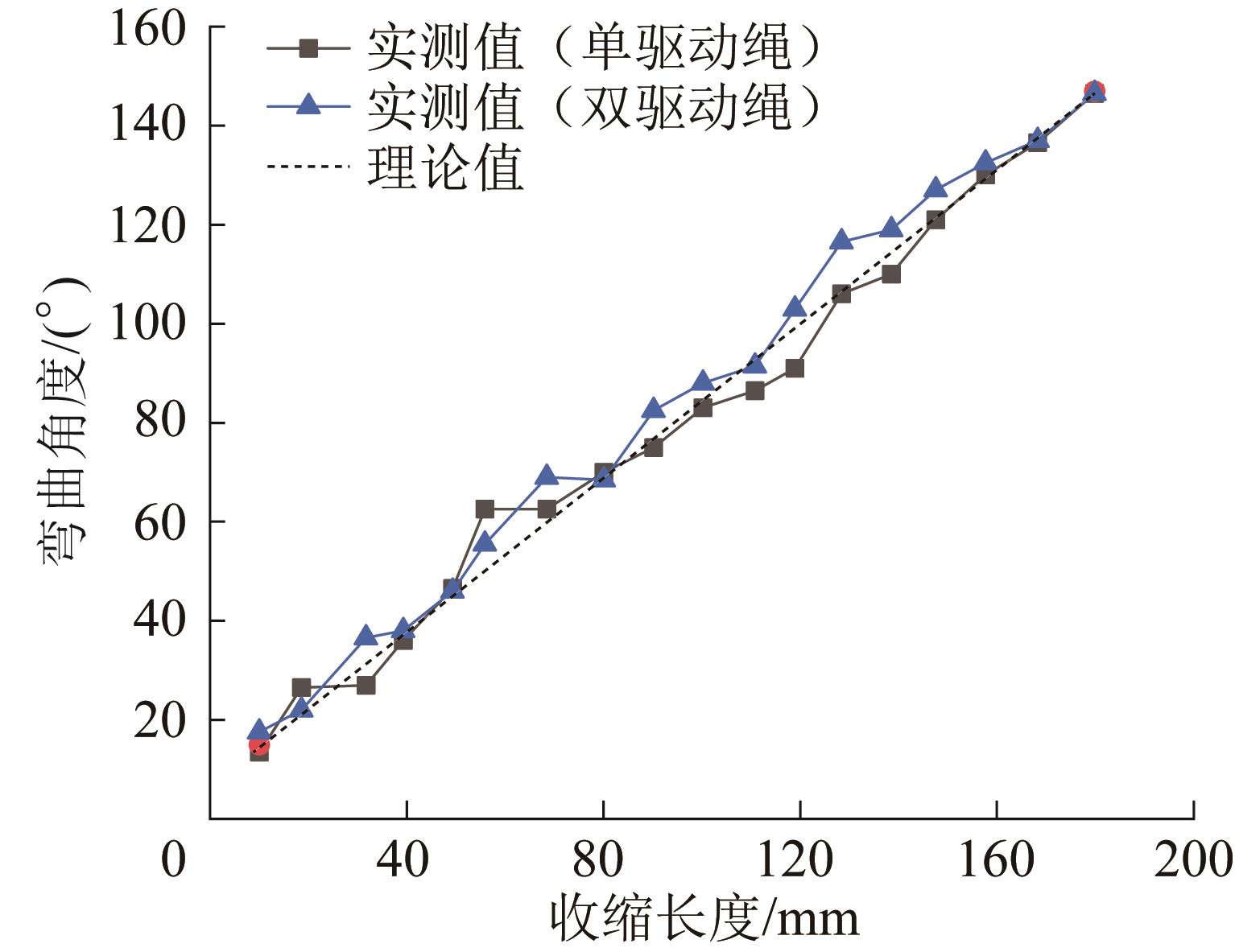
Fig.5 Variation curves of bending angle of flexible continuum robotic arm with contraction length of driving rope
Fig.6 Stiffness measurement device for flexible continuum robotic arm
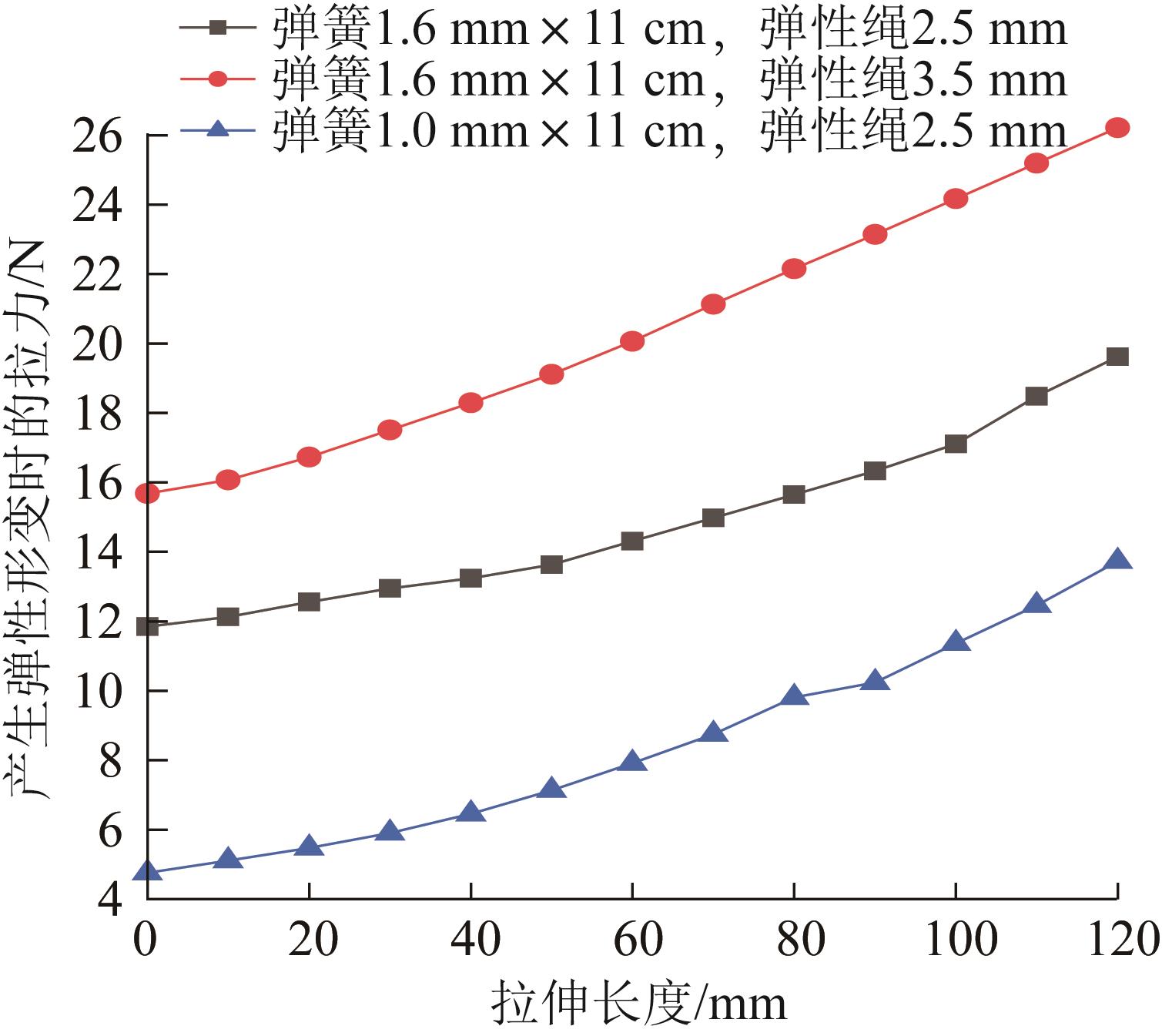
Fig.7 Variation curves of stiffness of flexible continuum robotic arm
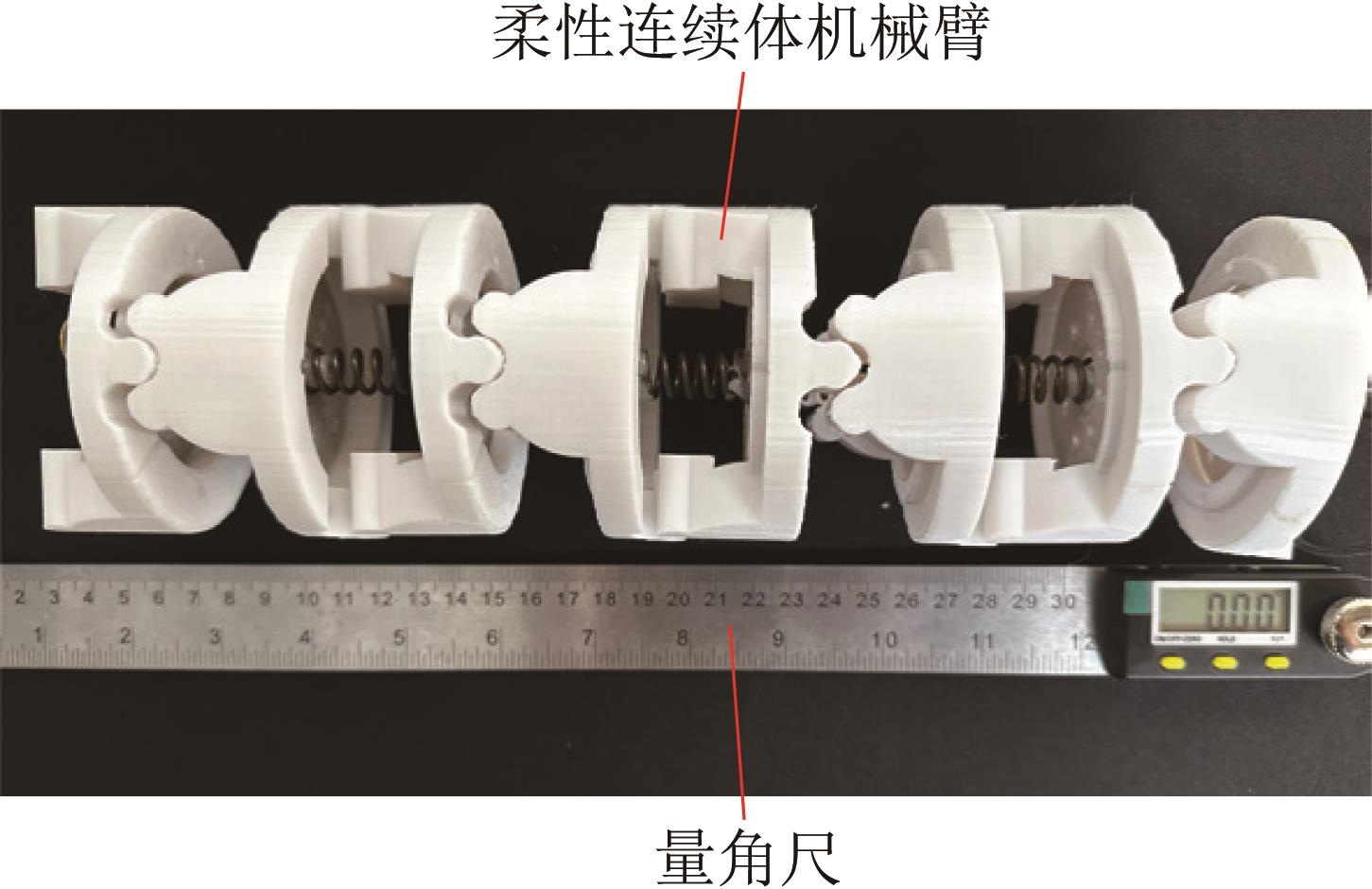
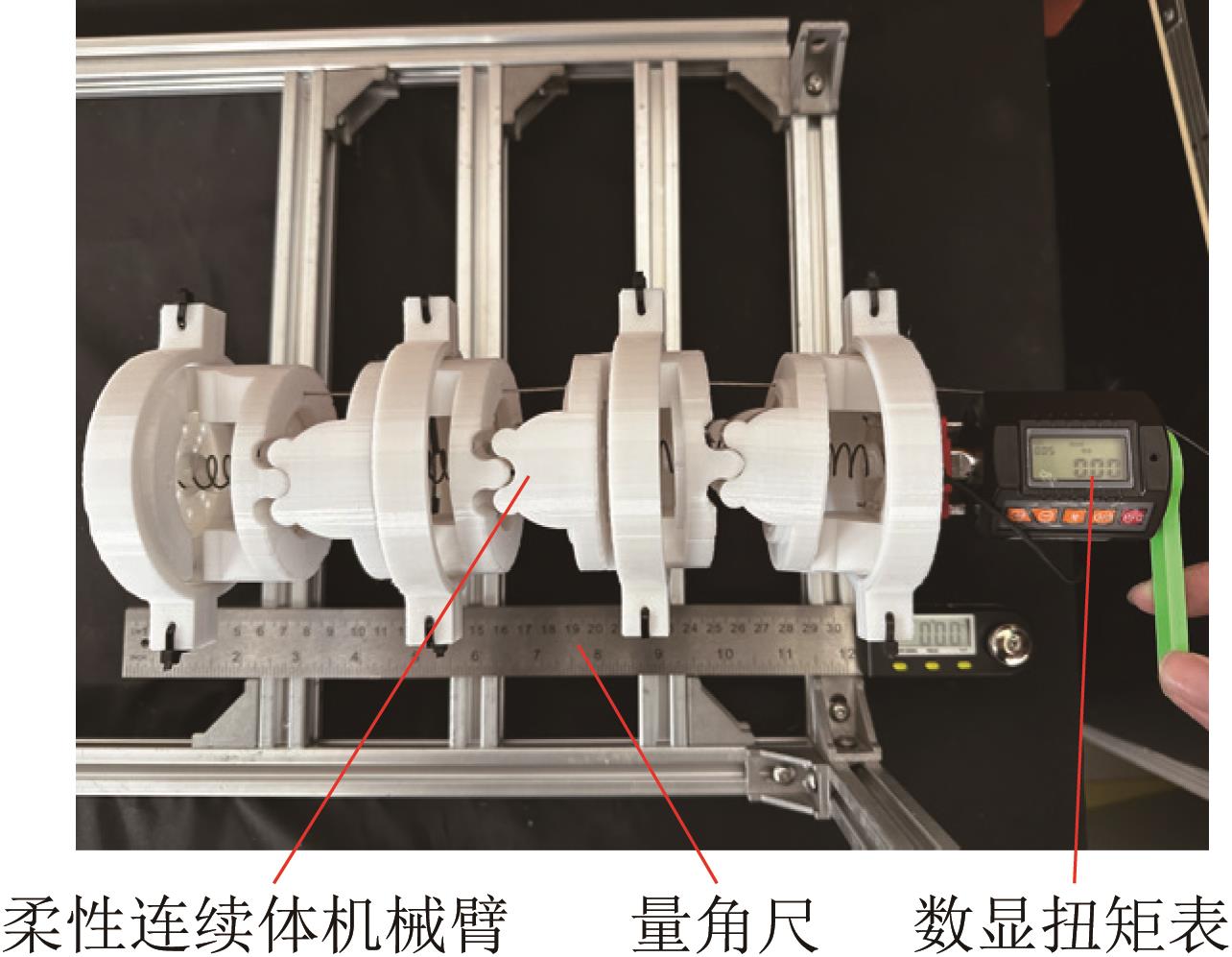
Fig.8 Bending angle measurement device for flexible continuum robotic arm
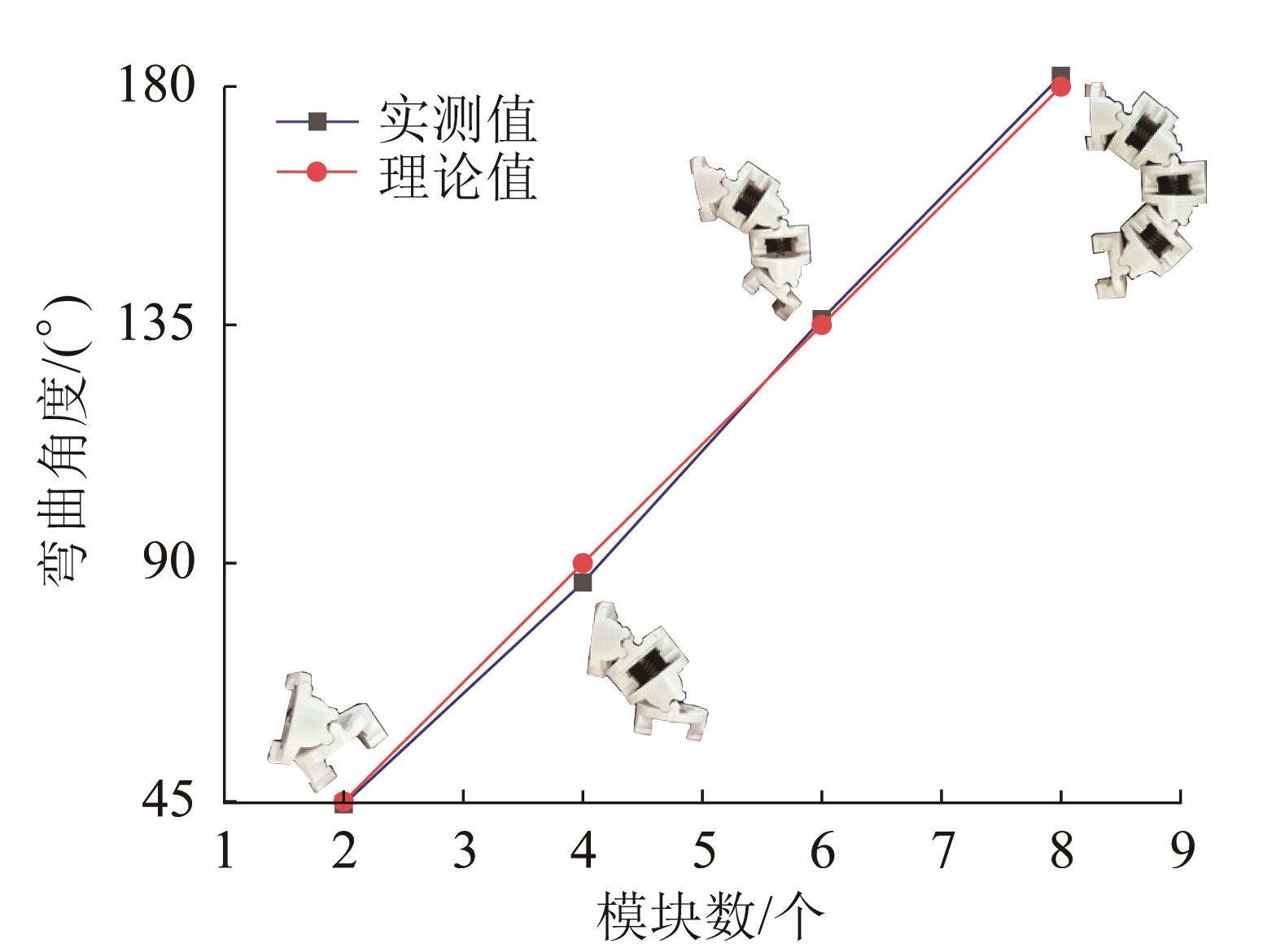
Fig.9 Variation curves of bending angle of flexible continuum robotic arm
Fig.10 Test device for rotating performance of flexible continuum robotic arm
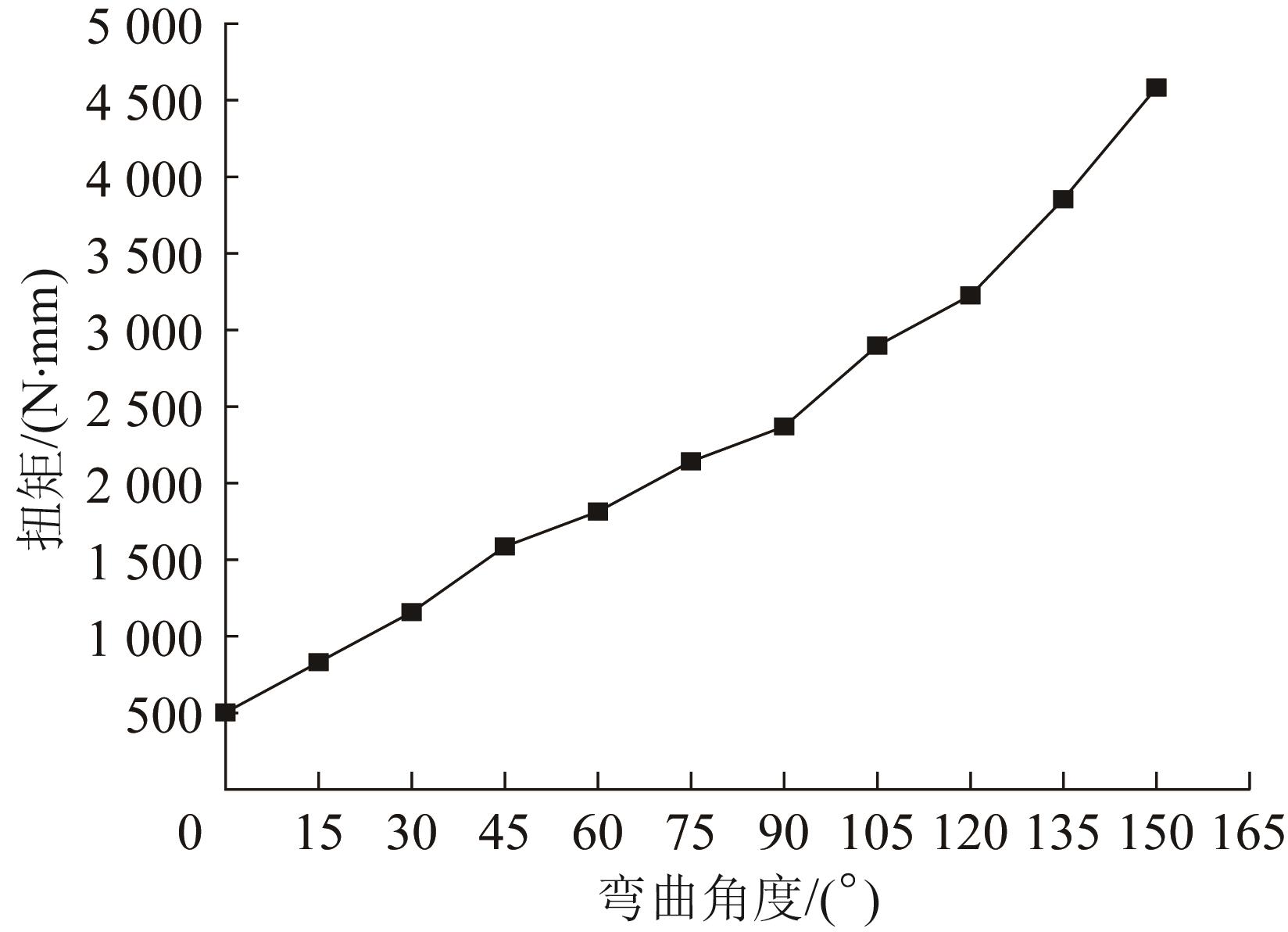
Fig.11 Torque variation curve of flexible continuum robotic arm with bending angle
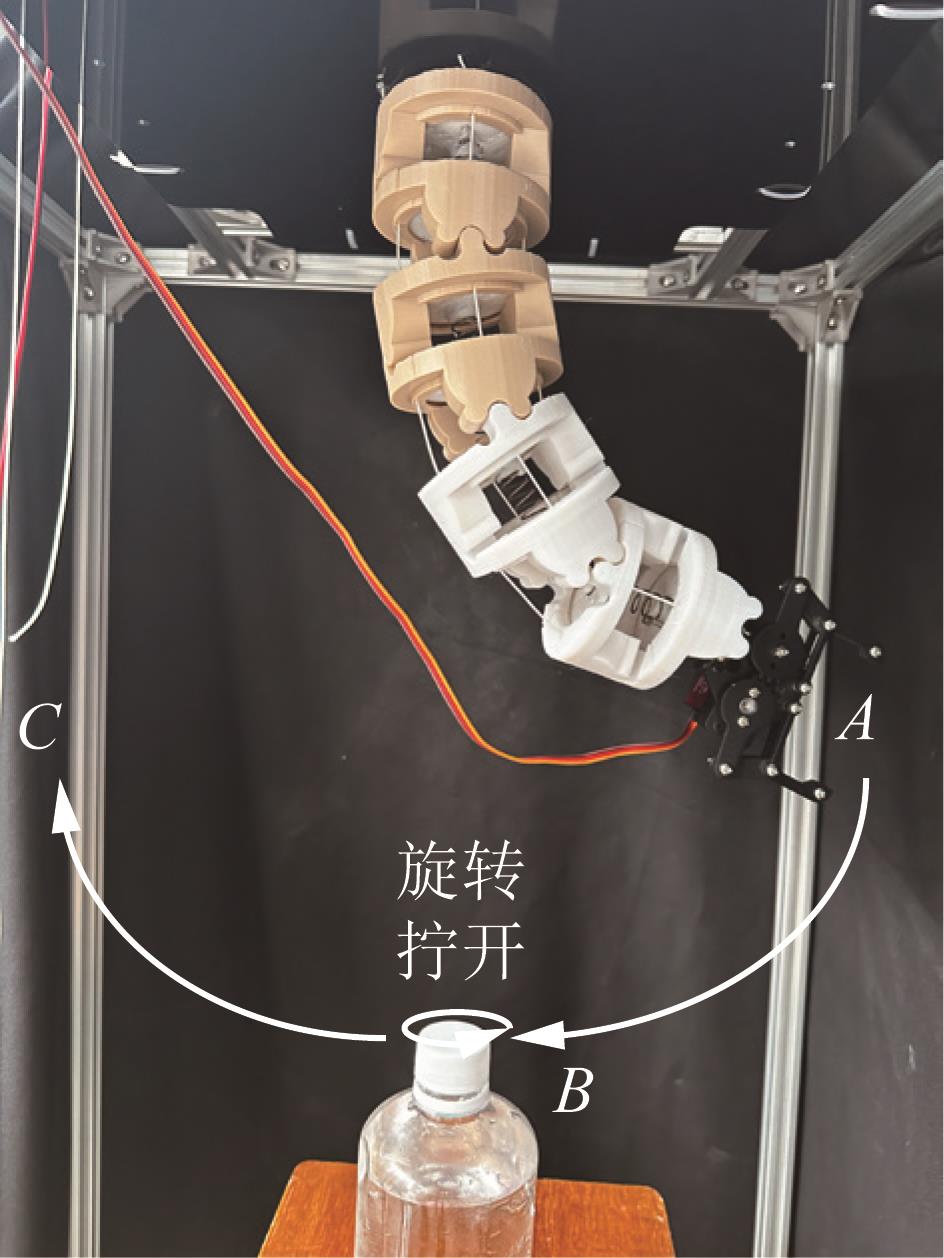
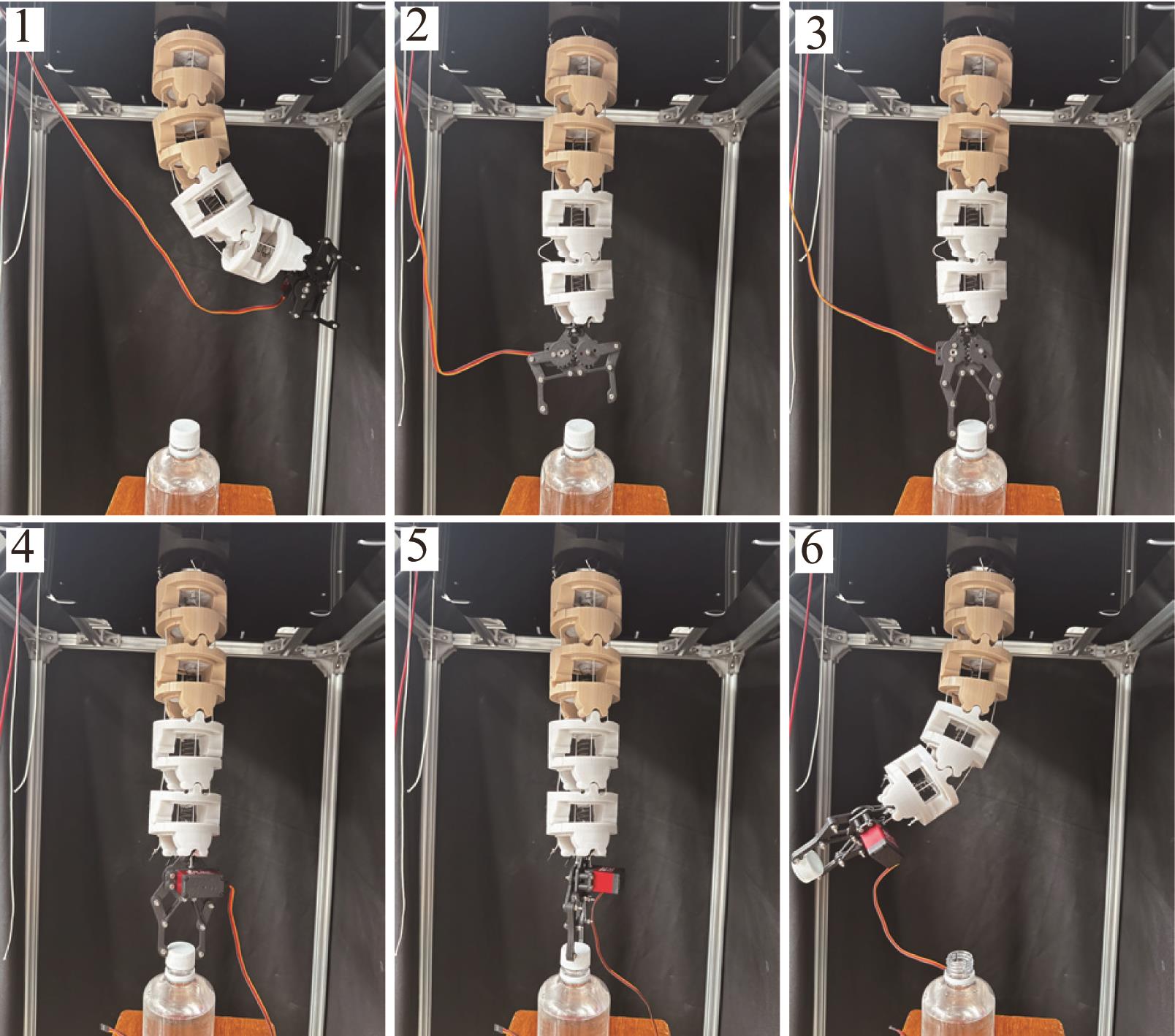
Fig.12 Experiment scheme of flexible continuum robotic arm unscrewing bottle cap
轨迹点坐标/
mm
弯曲角度/(°)
拉伸/收缩长度/mm
左驱动绳
右驱动绳
(0, 0, -300)
0
0
0
(-120, 0, -160)
71
-27.5
27.5
(100, 0, -175)
65
25.2
-25.2
Table 1Experimental planning parameters of flexible continuum robotic arm unscrewing bottle cap
Fig.13 Motion process of flexible continuum robotic arm unscrewing bottle cap
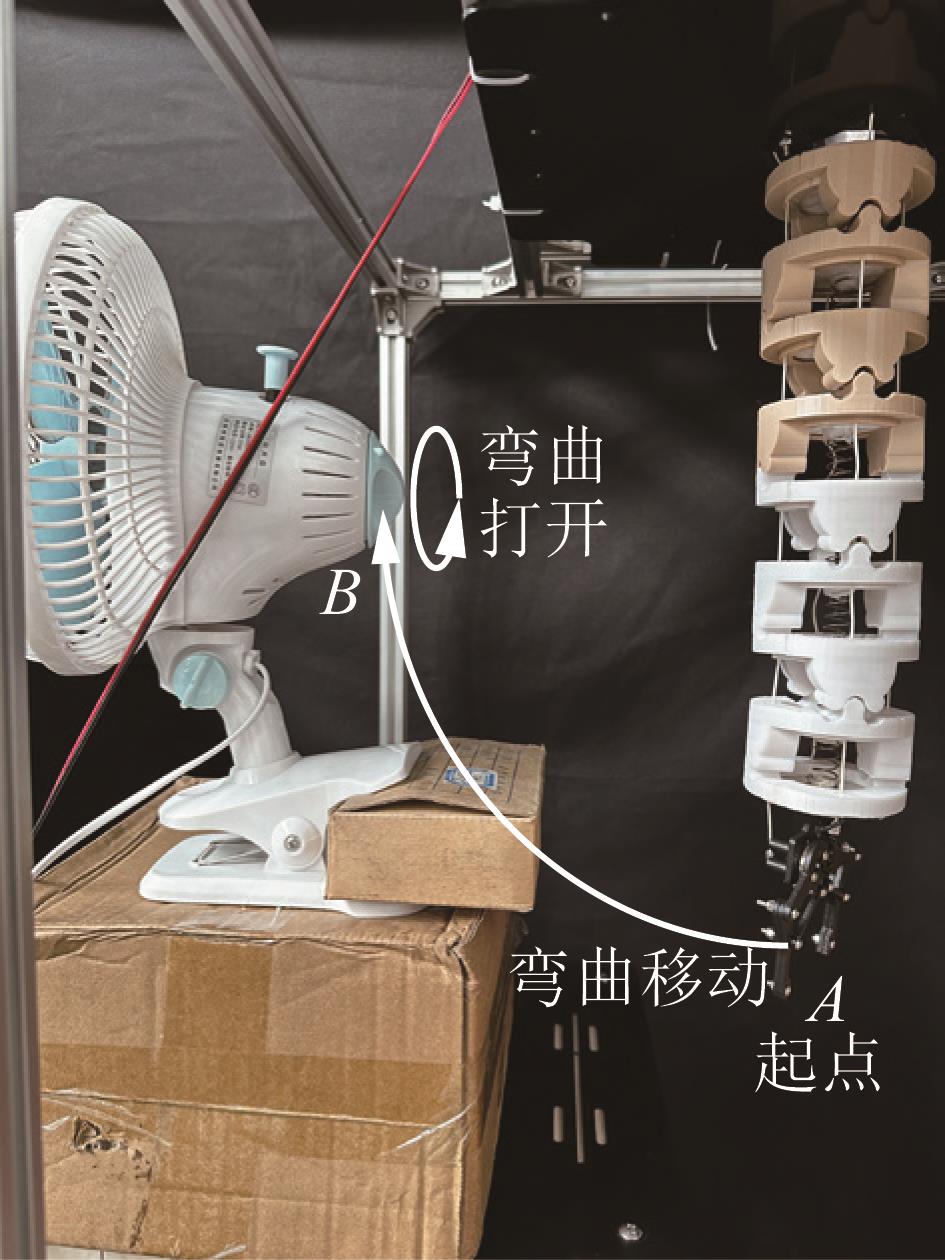
Fig.14 Experiment scheme of flexible continuum robotic arm switching on fan
轨迹点坐标/mm
弯曲角度/(°)
拉伸/收缩长度/mm
左驱动绳
右驱动绳
(0, 0, -300)
0
0
0
(142, 0, -125)
108
41.8
-41.8
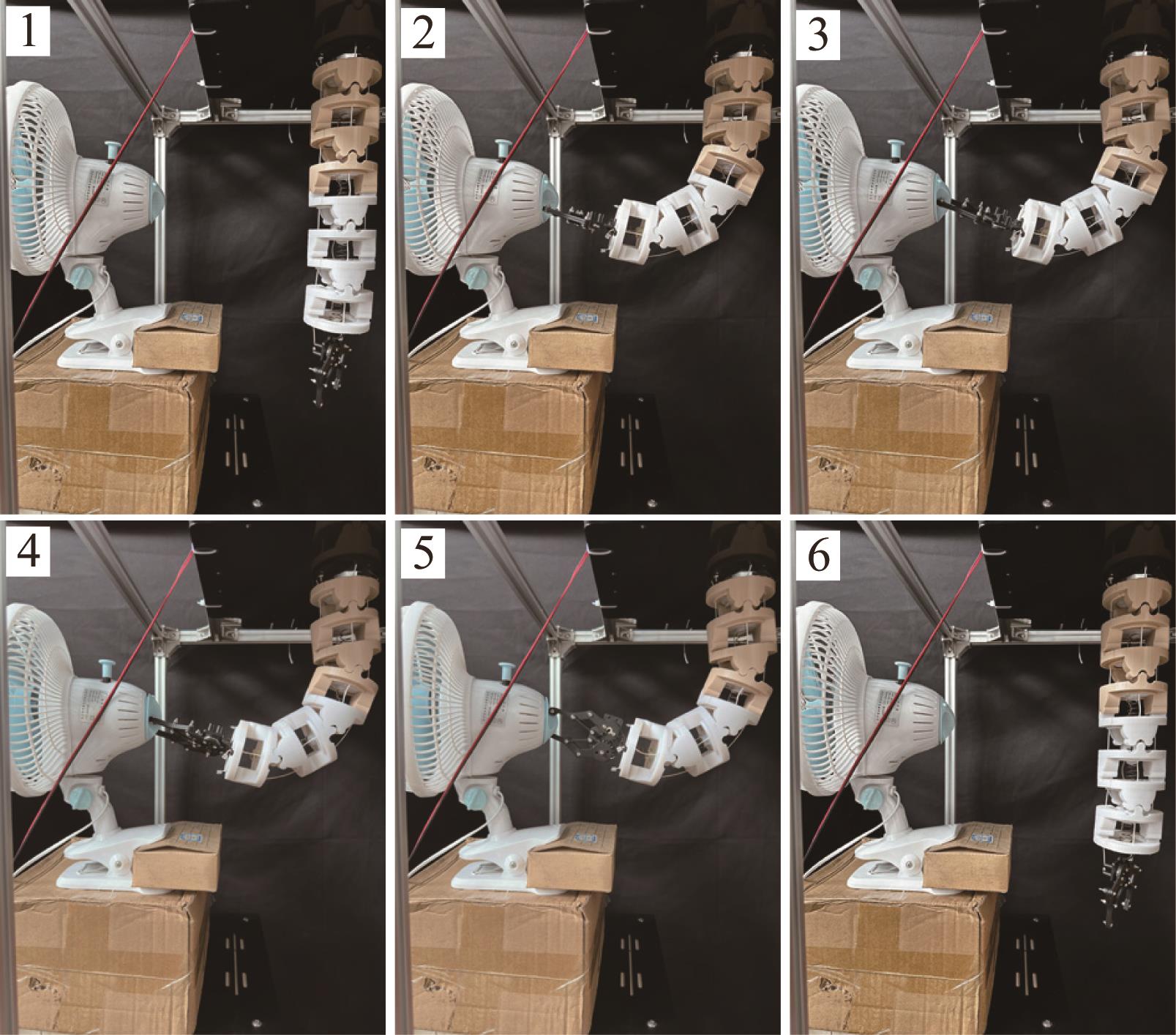
Table 2Experimental planning parameters of flexible continuum robotic arm switching on fan
Fig.15 Motion process of flexible continuum robotic arm switching on fan
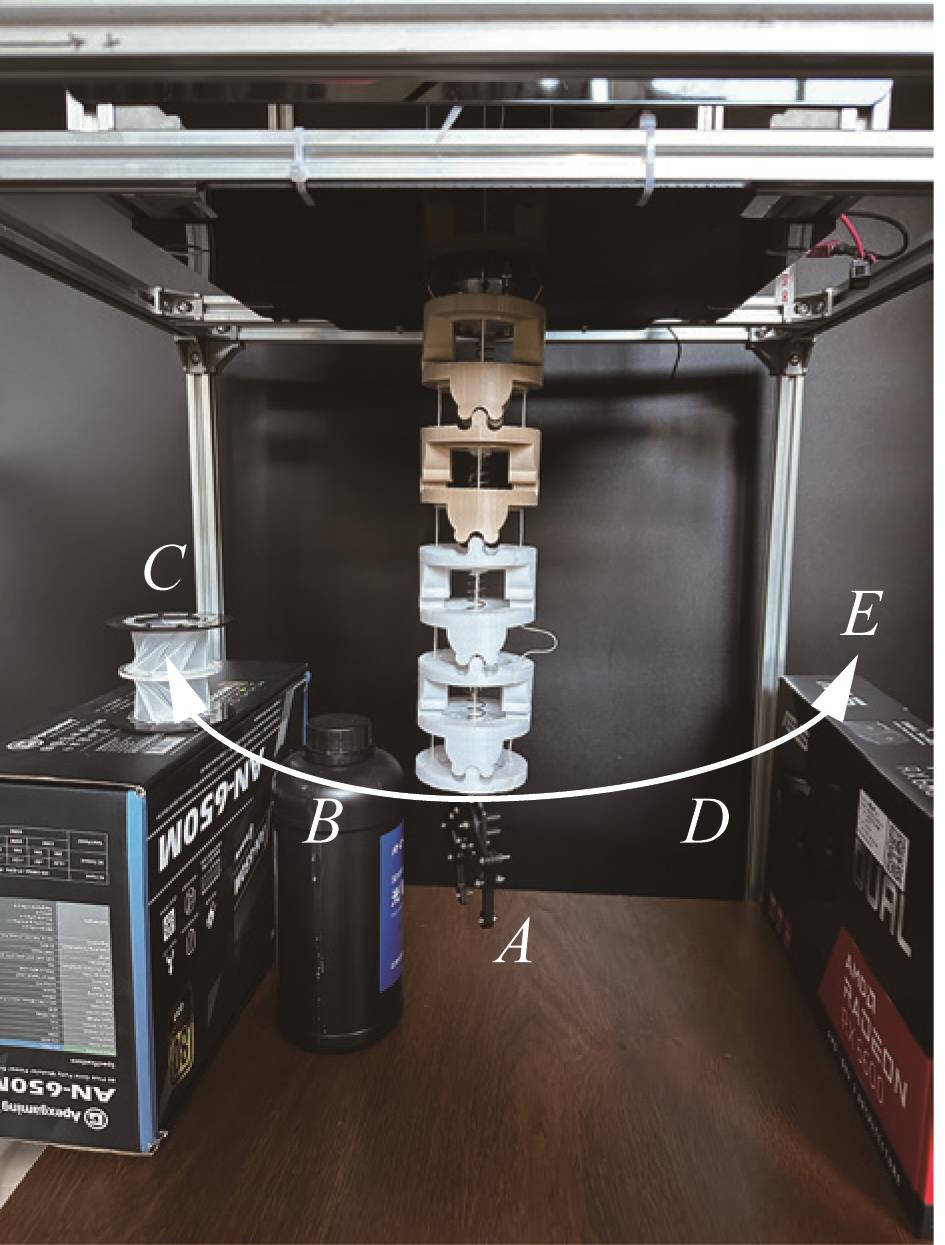
Fig.16 Experiment scheme of three-dimensional grasping of flexible continuum robotic arm
抓取平面
轨迹点坐标/mm
弯曲角度/(°)
拉伸/收缩长度/mm
左驱动绳
右驱动绳
前后平面
(0, 0, -300)
0
0
0
(0, 165, -148)
113
43.8
-43.8
左右平面
(0, 0, -300)
0
0
0
(128, 0, -148)
85
32.9
-32.9
(-128, 0, -148)
85
-32.9
32.9
Table 3Experimental planning parameters for three-dimensional grasping of flexible continuum robotic arm
Fig.17 Motion process of three-dimensional grasping of flexible continuum robotic arm
[1]
朱文斌,李俊,杨进兴,等.基于重力补偿与滤波模型的工业机械臂打磨技术的研究[J].工业控制计算机,2021,34(8):67-69. doi:10.3969/j.issn.1001-182X.2021.08.024 ZHU W B, LI J, YANG J X, et al. Research on polishing technology of industrial mechanical ARM based on gravity compensation and filter model[J]. Industrial Control Computer, 2021, 34(8): 67-69.
doi: 10.3969/j.issn.1001-182X.2021.08.024
[2]
莫柠锴.面向机械臂抓取应用的高精度目标6D位姿估计[D].深圳:中国科学院大学(中国科学院深圳先进技术研究院),2021. MO N K. High-precision 6D pose estimation for manipulator grasping[D]. Shenzhen: University of Chinese Academy of Sciences (Shenzhen Institute of Advanced Technology,Chinese Academy of Sciences), 2021.
[3]
杨文龙.面向单孔腔镜手术的连续型机械臂及其运动建模的研究[D].哈尔滨:哈尔滨工业大学,2016. YANG W L. Research on kinematic modeling of a continuum manipulator for signle port access laparoscopy surgery[D]. Harbin: Harbin Institute of Technology, 2016.
[4]
耿浩.面向狭小空间作业的绳驱超冗余机械臂结构设计与研究[D].沈阳:沈阳工业大学,2021. GENG H. Structure design and research of rope driven hyper-redundant manipulator for narrow space operation[D]. Shenyang: Shenyang University of Technology, 2021.
[5]
牟宗高.面向狭小空间作业的超冗余机器人轨迹规划及控制研究[D].哈尔滨:哈尔滨工业大学,2017. MOU Z G. Research on trajectory planning and control of hyper-redundant robots for confined-space operations[D]. Harbin: Harbin Institute of Technology, 2017.
[6]
刘天亮.面向狭小空间作业的绳索驱动超冗余机械臂的研究[D].哈尔滨:哈尔滨工业大学,2016. doi:10.18869/acadpub.jafm.68.236.25086 LIU T L. A study on the cable-driven and hyper redundant manipulator for the narrow space operations[D]. Harbin: Harbin Institute of Technology, 2016.
doi: 10.18869/acadpub.jafm.68.236.25086
[7]
朱晓俊,王学谦,马云萱,等.绳驱超冗余空间柔性机械臂遥操作系统设计与实验研究[J].机器人,2022,44(1):9-18. doi:10.13973/j.cnki.robot.210228 ZHU X J, WANG X Q, MA Y X, et al. Design and experimental study on the teleoperation system for cable-driven and hyper-redundant space flexible manipulator[J]. Robot, 2022, 44(1): 9-18.
doi: 10.13973/j.cnki.robot.210228
[8]
符海明.面向空间应用的连续型绳驱柔性机械臂设计[D]. 哈尔滨:哈尔滨工业大学,2019. FU H M. Design of continuous flexible cable-driven manipulator for outer space application[D]. Harbin: Harbin Institute of Technology, 2019.
[9]
王剑,李成刚,岳云双,等.面向航天器零部件装配的机械臂混合控制策略[J].航空科学技术,2022,33(2):90-96. WANG J, LI C G, YUE Y S, et al. Hybrid control strategy of manipulator for spacecraft component assembly[J]. Aeronautical Science & Technology, 2022, 33(2): 90-96.
[10]
RICH S I, WOOD R J, MAJIDI C. Untethered soft robotics[J]. Nature Electronics, 2018, 1: 102-112.
[11]
MANTI M, CACUCCIOLO V, CIANCHETTI M. Stiffening in soft robotics: a review of the state of the art[J]. IEEE Robotics & Automation Magazine, 2016, 23(3): 93-106.
[12]
HAWKES E W, BLUMENSCHEIN L H, GREER J D, et al. A soft robot that navigates its environment through growth[J]. Science Robotics, 2017, 2(8): eaan3028.
[13]
MORIMOTO Y, ONOE H, TAKEUCHI S. Biohybrid robot powered by an antagonistic pair of skeletal muscle tissues[J]. Science Robotics, 2017, 3(18): eaat4440.
[14]
WANG M F, PALMER D, DONG X, et al. Design and development of a slender dual-structure continuum robot for in-situ aeroengine repair[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid, Oct. 1-5, 2018.
[15]
HALVERSON P A, HOWELL L L, MAGLEBY S P. Tension-based multi-stable compliant rolling-contact elements[J]. Mechanism and Machine Theory, 2010, 45(2): 147-156.
[16]
HANNAN M W, WALKER I D. Kinematics and the implementation of an elephant’s trunk manipulator and other continuum style robots[J]. Journal of Robotic Systems, 2003, 20(2): 45-63.
[17]
MORALES BIEZE T, KRUSZEWSKI A, CARREZ B, et al. Design, implementation, and control of a deformable manipulator robot based on a compliant spine[J]. The International Journal of Robotics Research, 2020, 39(14): 1604-1619.
[18]
牛景达.具有旋转运动的连续体机械臂设计及性能分析 [D].赣州:江西理工大学,2022:3-40. NIU J D. Design and performance analysis of continuum manipulator with rotating motion[D]. Ganzhou: Jiangxi University of Science and Technology, 2022: 3-40.
[19]
WALKER I D, DAWSON D M, FLASH T, et al. Continuum robot arms inspired by cephalopods[C]//Proceedings Volume 5804, Unmanned Ground Vehicle Technology VII. Orlando, Florida, May 27, 2005.
[20]
McMAHAN W, JONES B A, WALKER I D. Design and implementation of a multi-section continuum robot: Air-Octor[C]//2005 IEEE/RSJ International Conference on Intelligent Robots and Systems. Edmonton, AB, Aug. 2-6, 2005.
[21]
McMAHAN W, CHITRAKARAN V, CSENCSITS M, et al. Field trials and testing of the OctArm continuum manipulator[C]//Proceedings of the 2006 IEEE International Conference on Robotics and Automation. Orlando, FL, May 15-19, 2006.
[22]
CHEN X Q, ZHANG X, LIU H, et al. Design and development of a soft robotic manipulator[J]. International Journal of Mechanics and Materials in Design, 2020, 16(2): 309-321.
[23]
ZHANG Z, TANG S J, FAN W C, et al. Design and analysis of hybrid-driven origami continuum robots with extensible and stiffness-tunable sections[J]. Mechanism and Machine Theory, 2022, 169: 104607.
[24]
MONTIERTH J R, TODD R H, HOWELL L L. Analysis of elliptical rolling contact joints in compression[J]. Journal of Mechanical Design, 2011, 133(3): 031001.
[25]
KIM Y J, CHENG S B, KIM S, et al. A stiffness-adjustable hyperredundant manipulator using a variable neutral-line mechanism for minimally invasive surgery[J]. IEEE Transactions on Robotics, 2014, 30(2): 382-395.
[26]
KIMURA N, IWATSUKI N. Spatial rolling contact pair generating the specified relative motion between links[M]//Lecture Notes in Electrical Engineering. Singapore: Springer Singapore, 2016: 307-316.
[27]
SUH J, KIM K, JEONG J, et al. Design considerations for a hyper-redundant pulleyless rolling joint with elastic fixtures[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(6): 2841-2852.
[28]
董栋.基于滚动接触的机器人设计与运动分析[D].赣州:江西理工大学,2023. DONG D. Design and motion analysis of continuous robot based on rolling contact[D]. Ganzhou: Jiangxi University of Science and Technology, 2023.
[29]
JONES B A, WALKER I D. Kinematics for multisection continuum robots[J]. IEEE Transactions on Robotics, 2006, 22(1): 43-55.
[30]
CHAWLA A. FRAZELLE C, WALKER I. A comparison of constant curvature forward kinematics for multisection continuum manipulators[C]//2018 Second IEEE International Conference on Robotic Computing (IRC). Laguna Hills, CA, Jan. 31-Feb. 2, 2018.