| Robotic and Mechanism Design |
|

|
|
|
| Design of single-module multi-degree-of-freedom flexible continuum robotic arm based on rolling contact |
Liang ZHOU( ),Tao WEN,Junfeng HU(),Hao ZHOU ),Tao WEN,Junfeng HU(),Hao ZHOU |
| School of Mechanical and Electrical Engineering, Jiangxi University of Science and Technology, Ganzhou 341000, China |
|
|
|
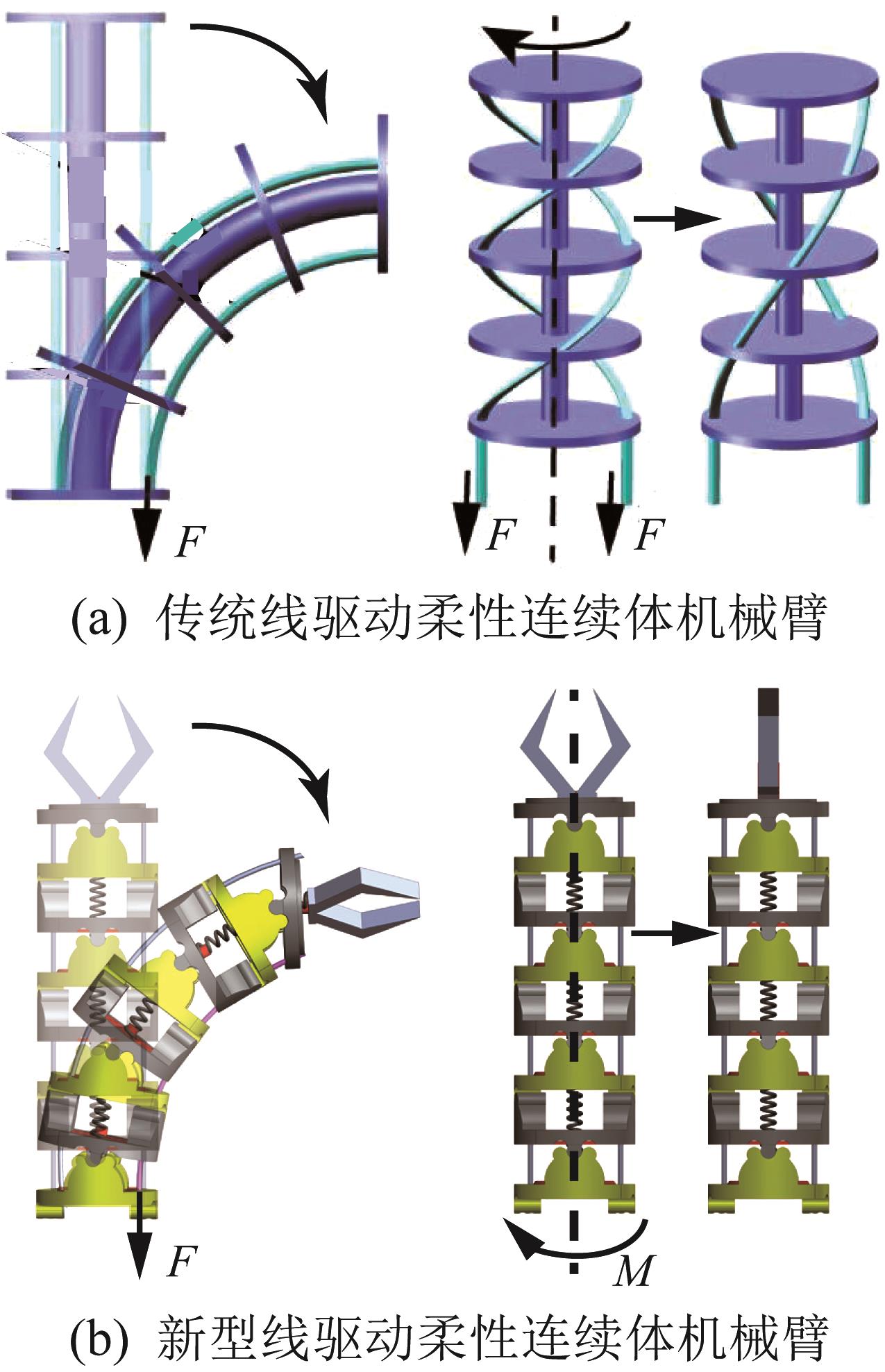
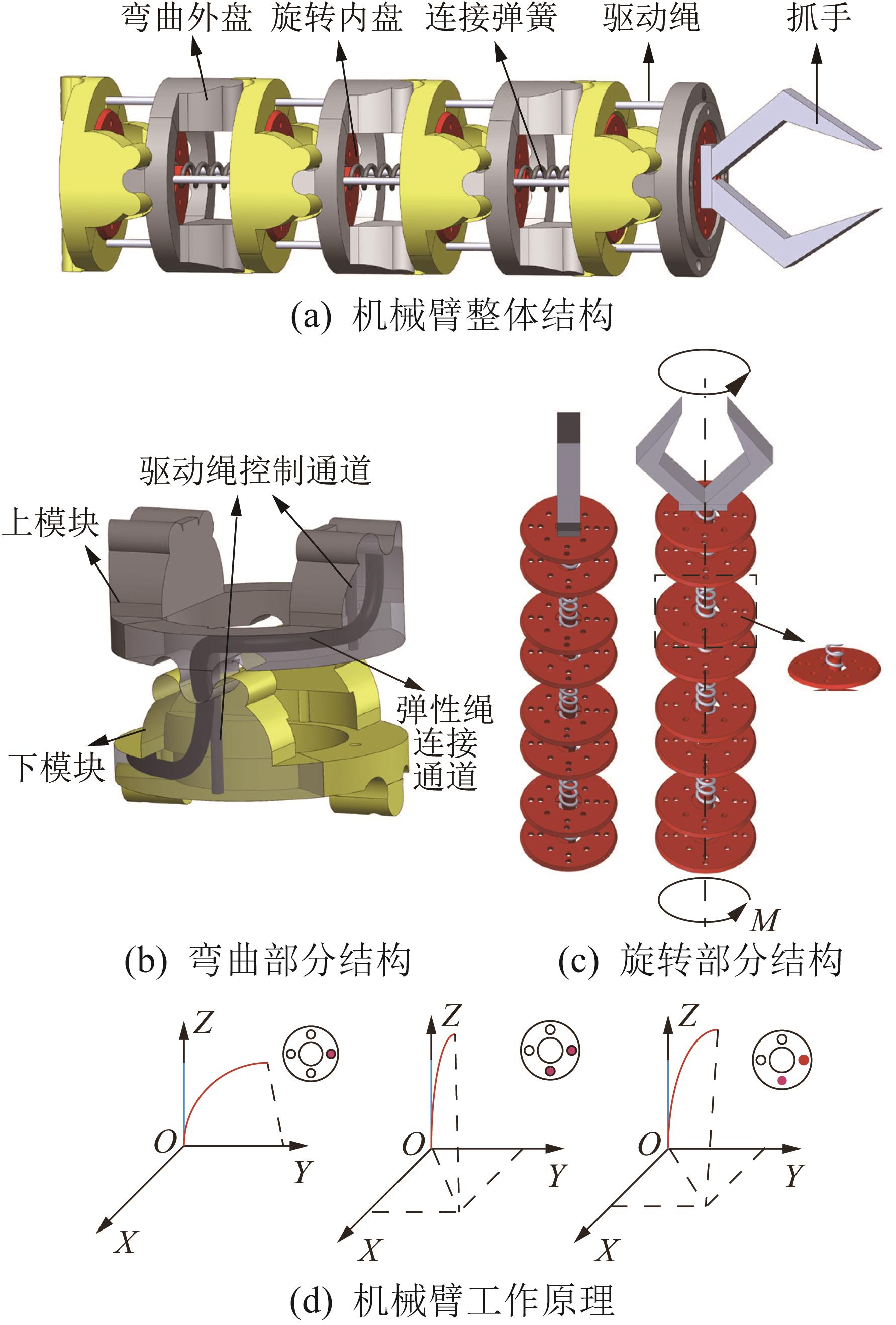
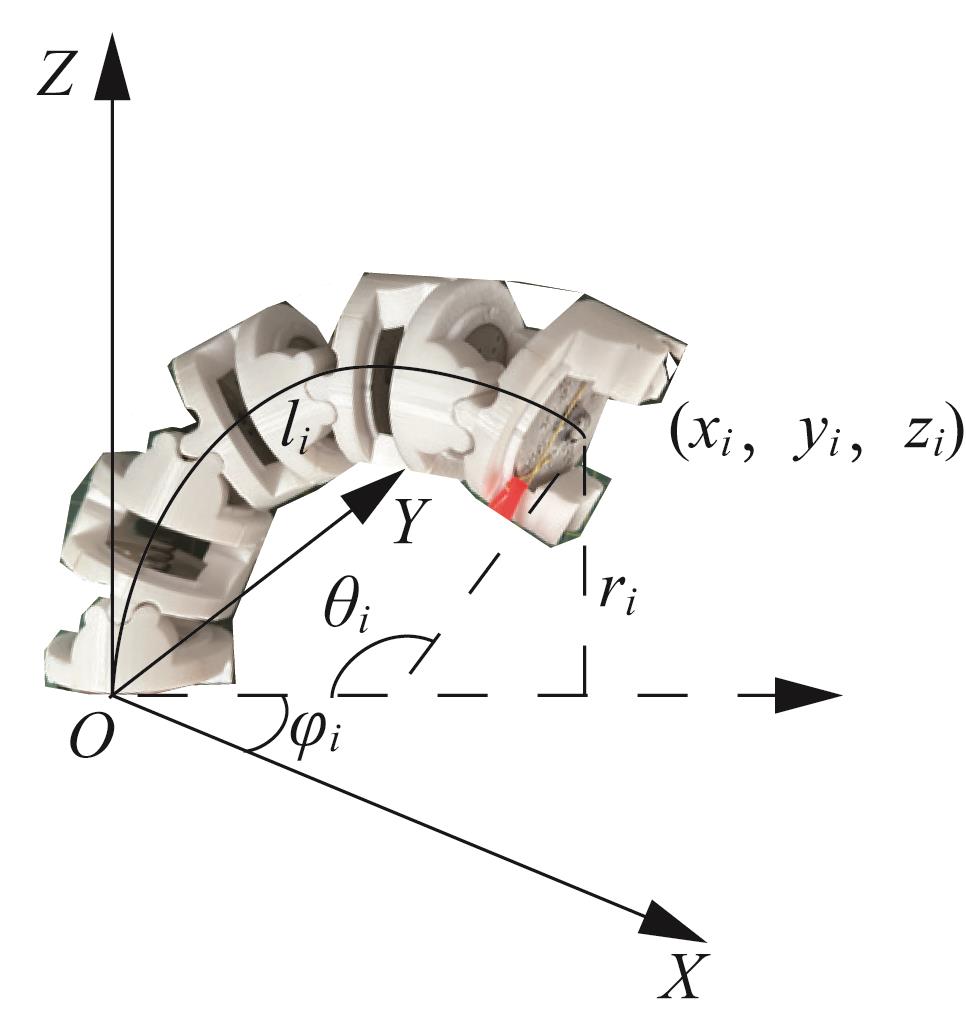
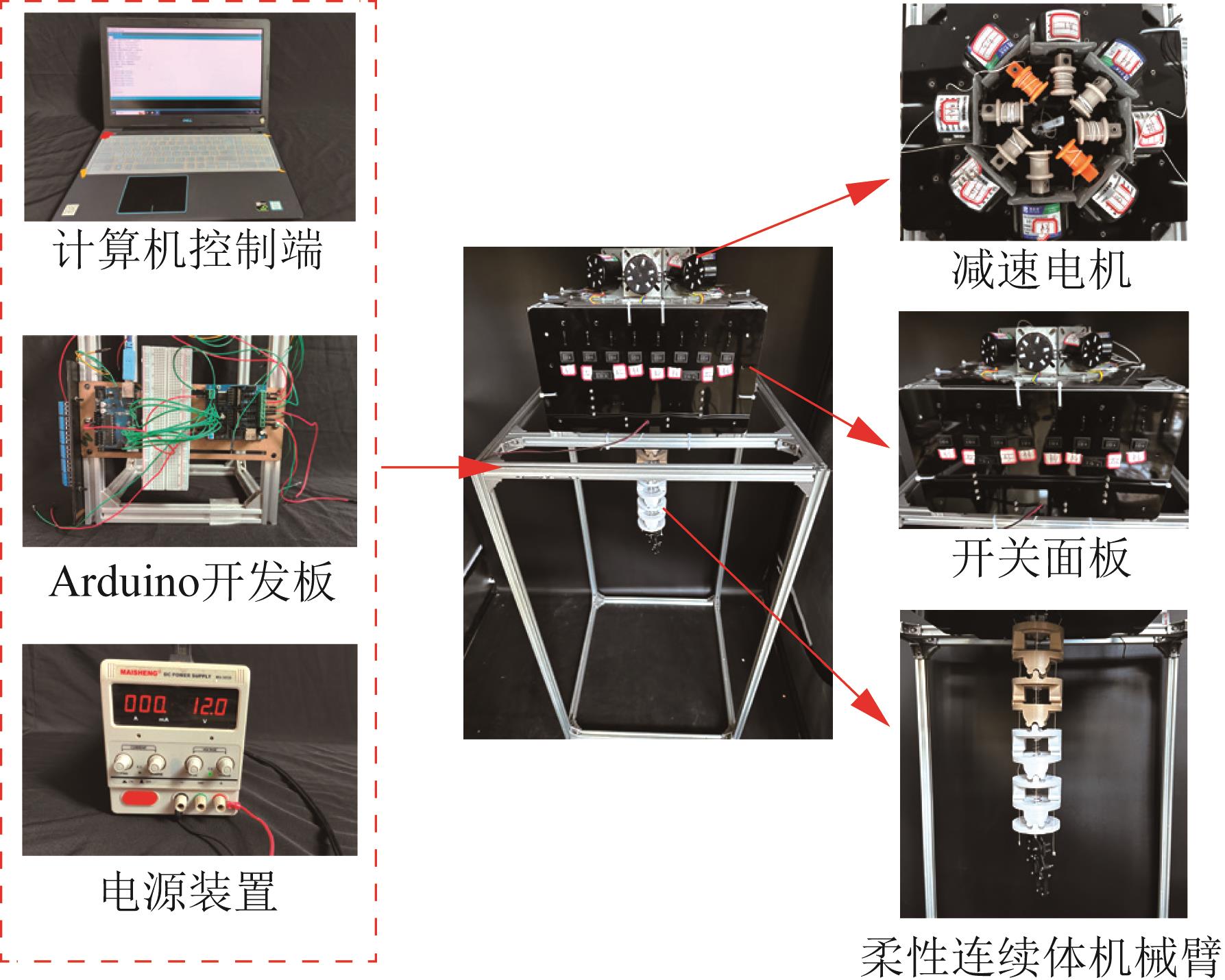
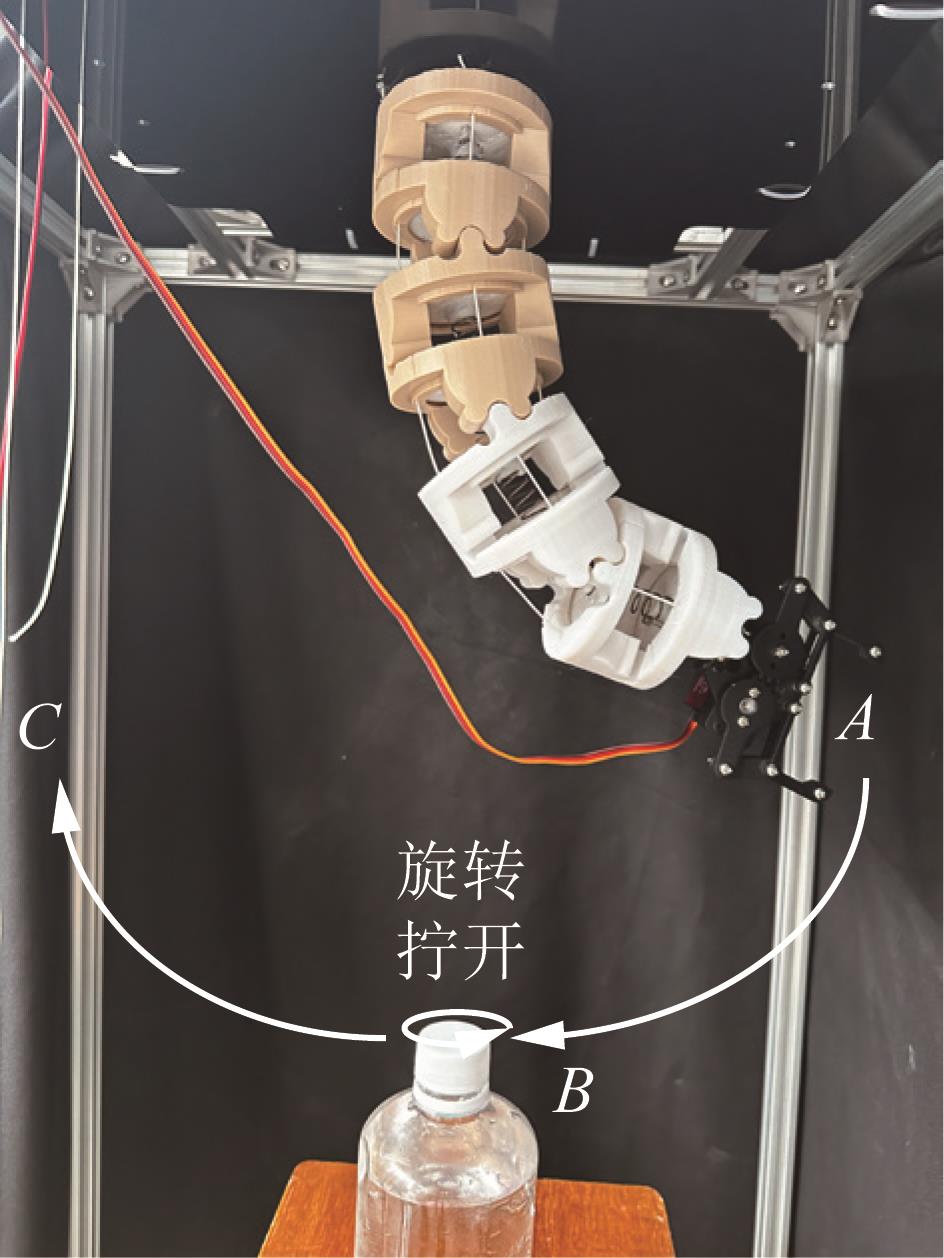
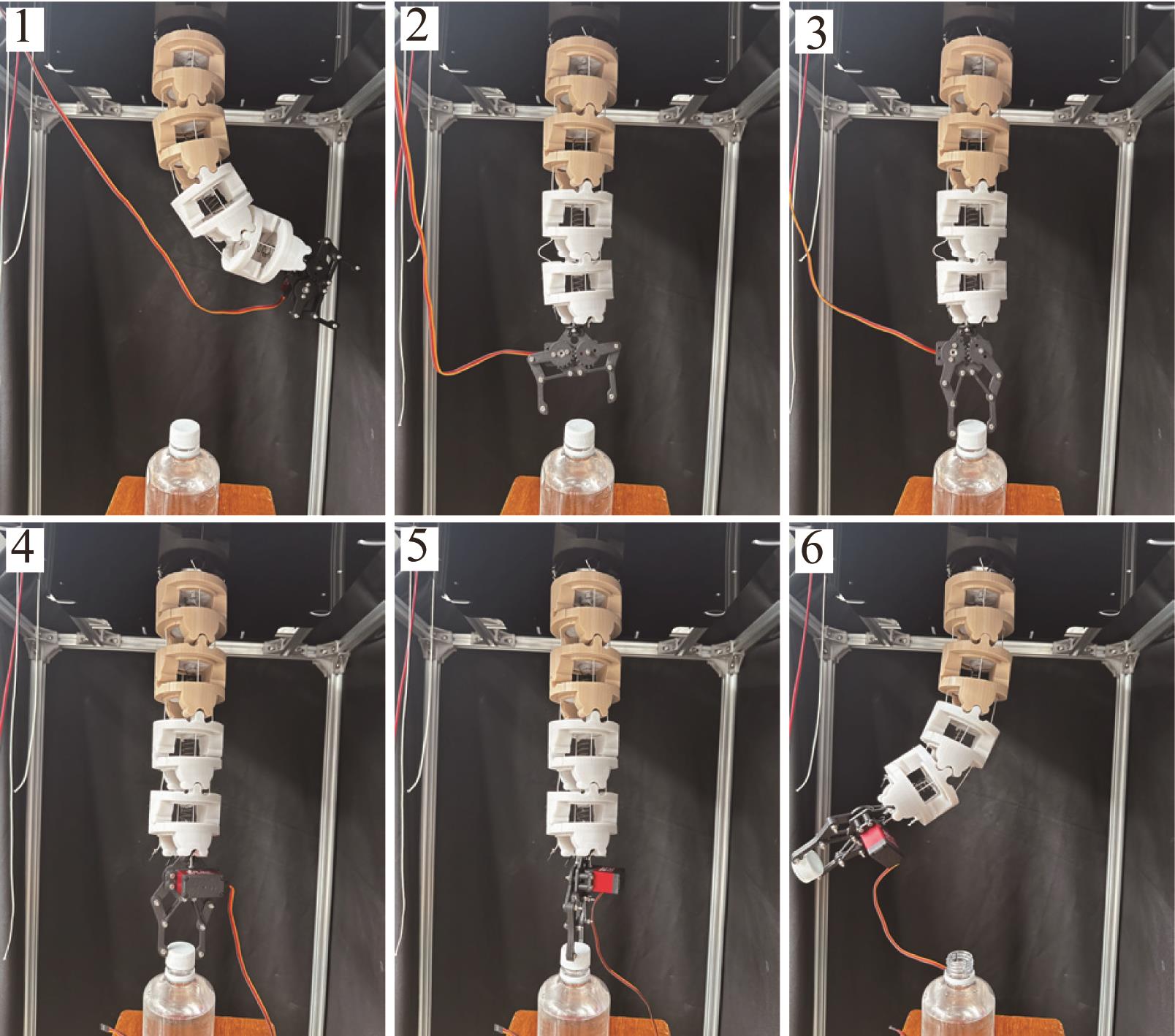
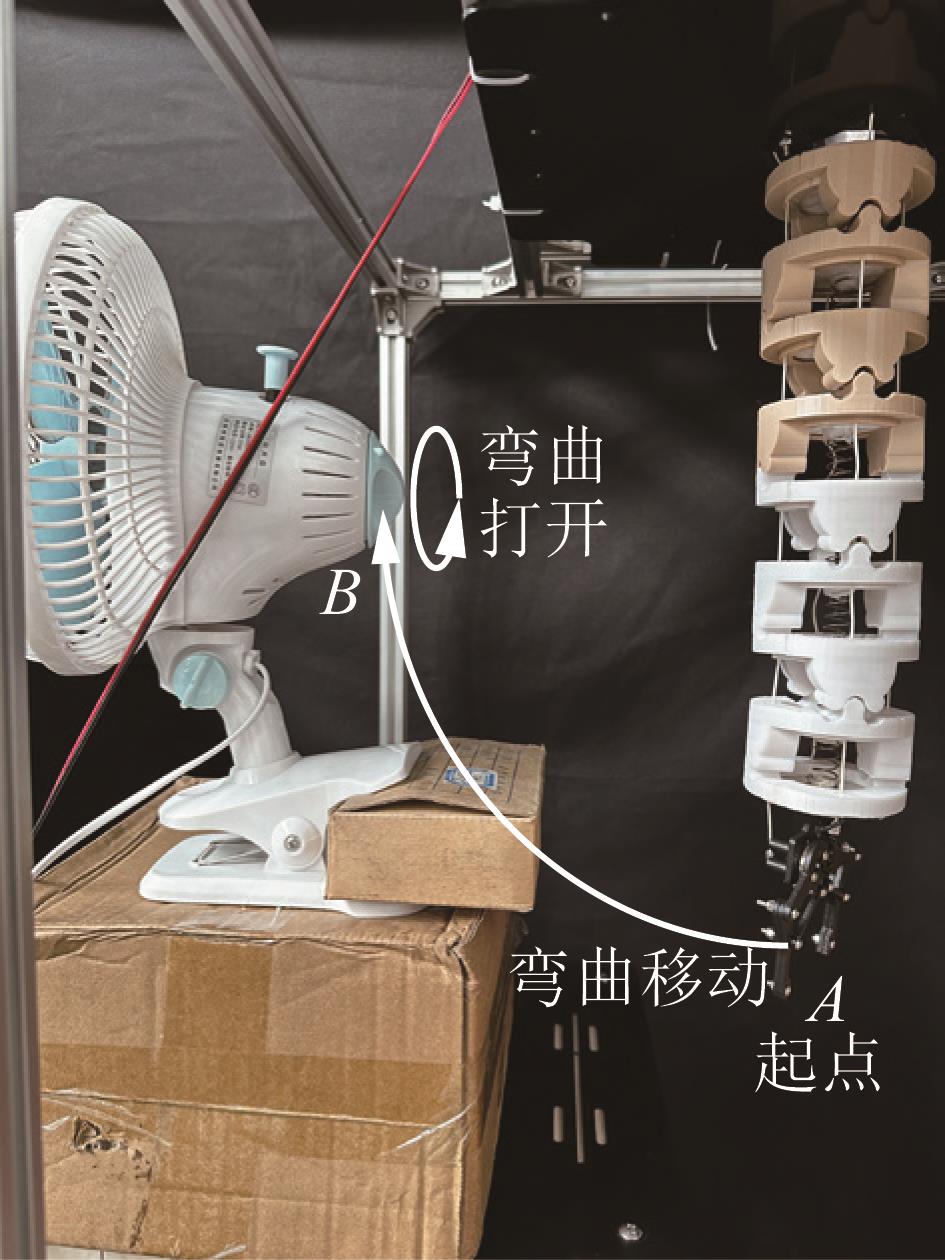
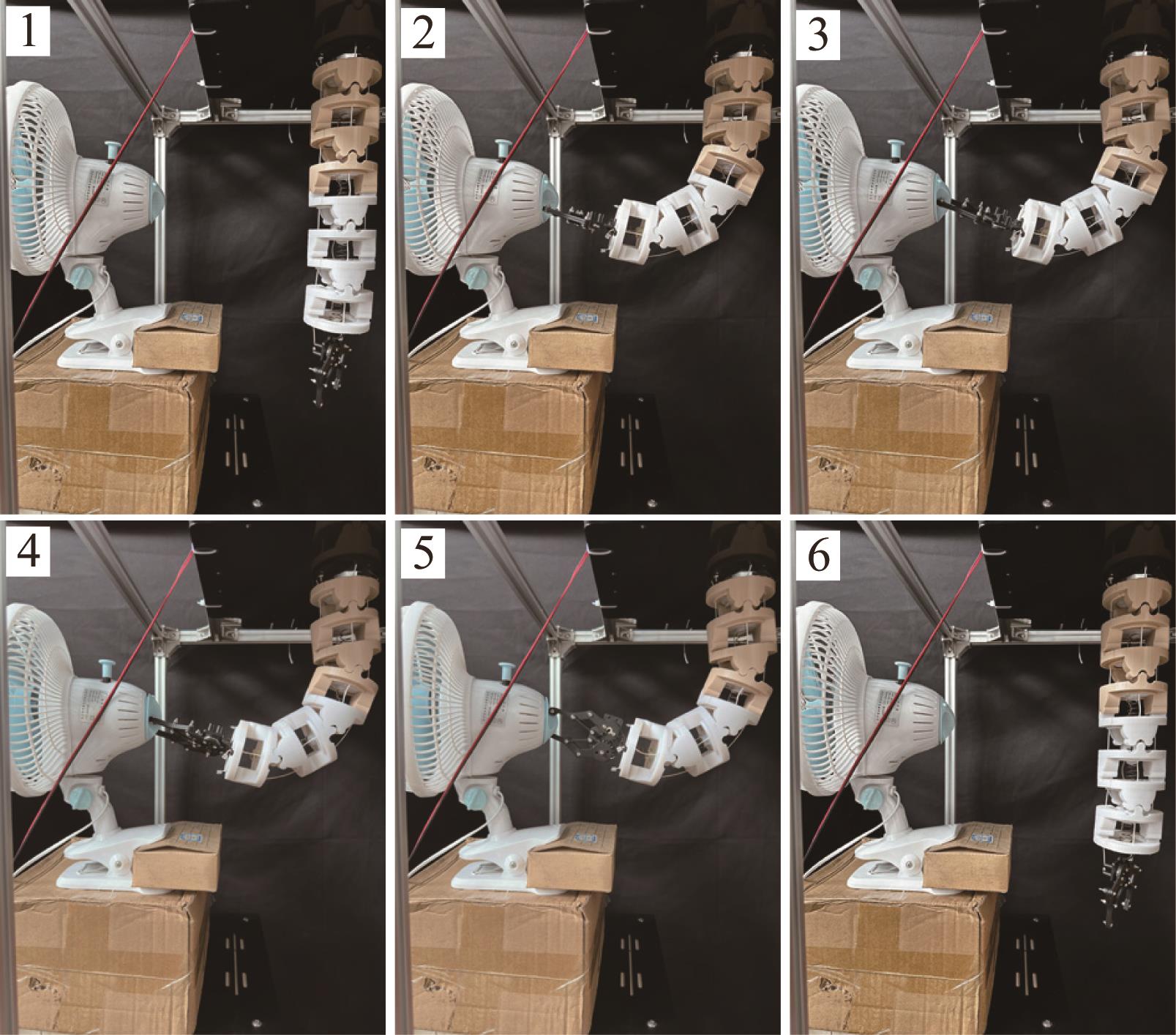
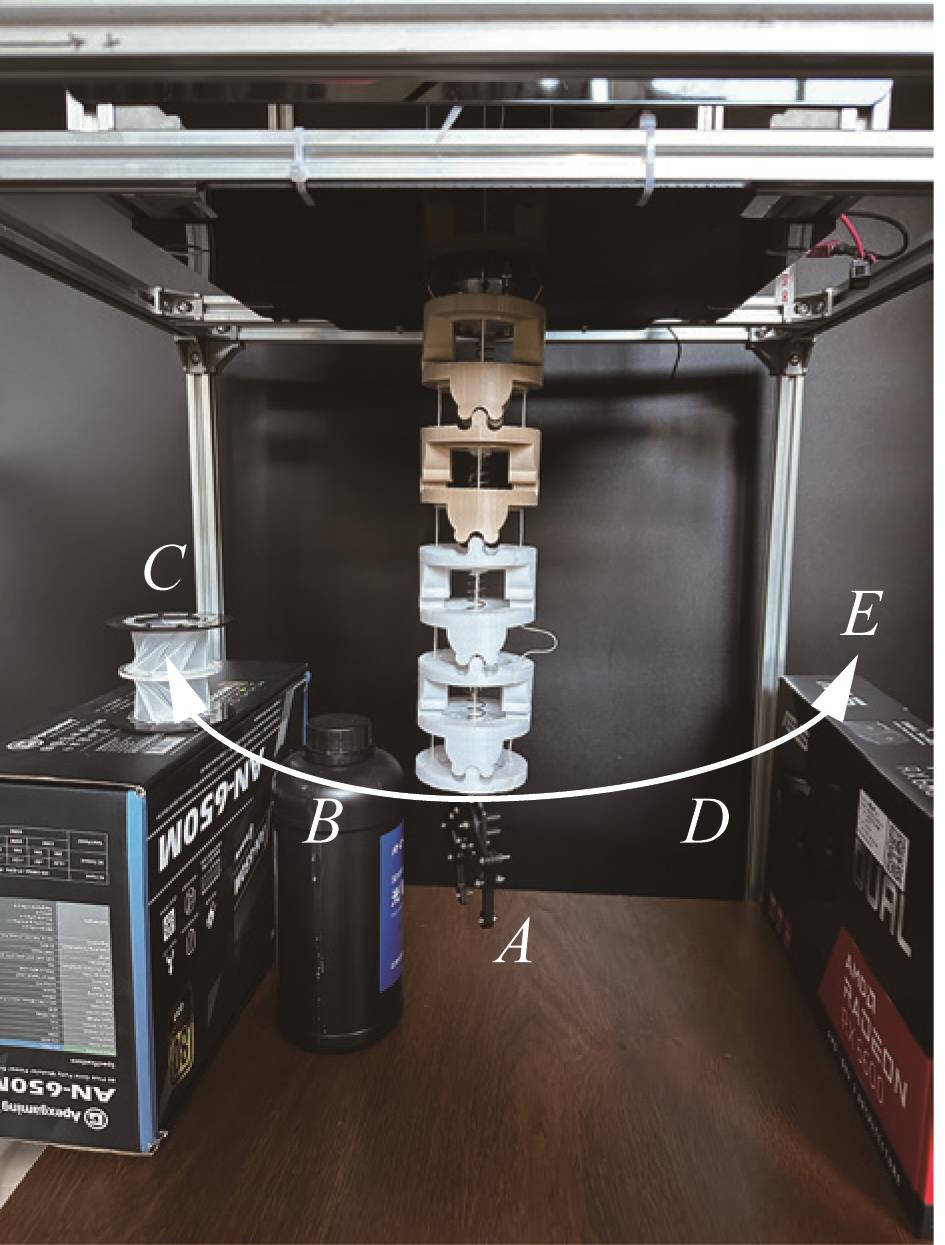
Abstract In order to realize the multi-modal motion of continuum robotic arm and solve the problem that the existing robotic arm can only achieve single bending or rotation, a single-module multi-degree-of-freedom flexible continuum robotic arm based on rolling contact is designed. The rolling contact module was used as the skeleton structure of the bending module in the continuum robotic arm, and the rotating module was installed in the bending module to form a multi-degree-of-freedom robotic arm with independent bending and rotation motions. The kinematics model of the continuum robotic arm was established by the segmented constant curvature method, and its stiffness, bending and rotation properties were analyzed. A continuum robotic arm prototype was prepared, and experiments were carried out on the robotic arm to unscrew bottle caps, switch on the fan, and grasp the object by avoiding obstacles in the three-dimensional space. The experimental results showed that different tasks in complex spatial environment could be accomplished by the combined motion of bending and rotation, which reflected the advantages of the composite motion mode. The designed continuum robotic arm has multi-modal motion, which provides a new idea for the design of multi-degree-of-freedom continuum robotic arms and expands the application scenarios of continuum robotic arms.
|
|
Received: 09 November 2023
Published: 26 August 2024
|
|
|
|
Corresponding Authors:
Junfeng HU
E-mail: 1987002659@qq.com;hjfsuper@126.com
|
基于滚动接触的单模块多自由度柔性连续体机械臂设计
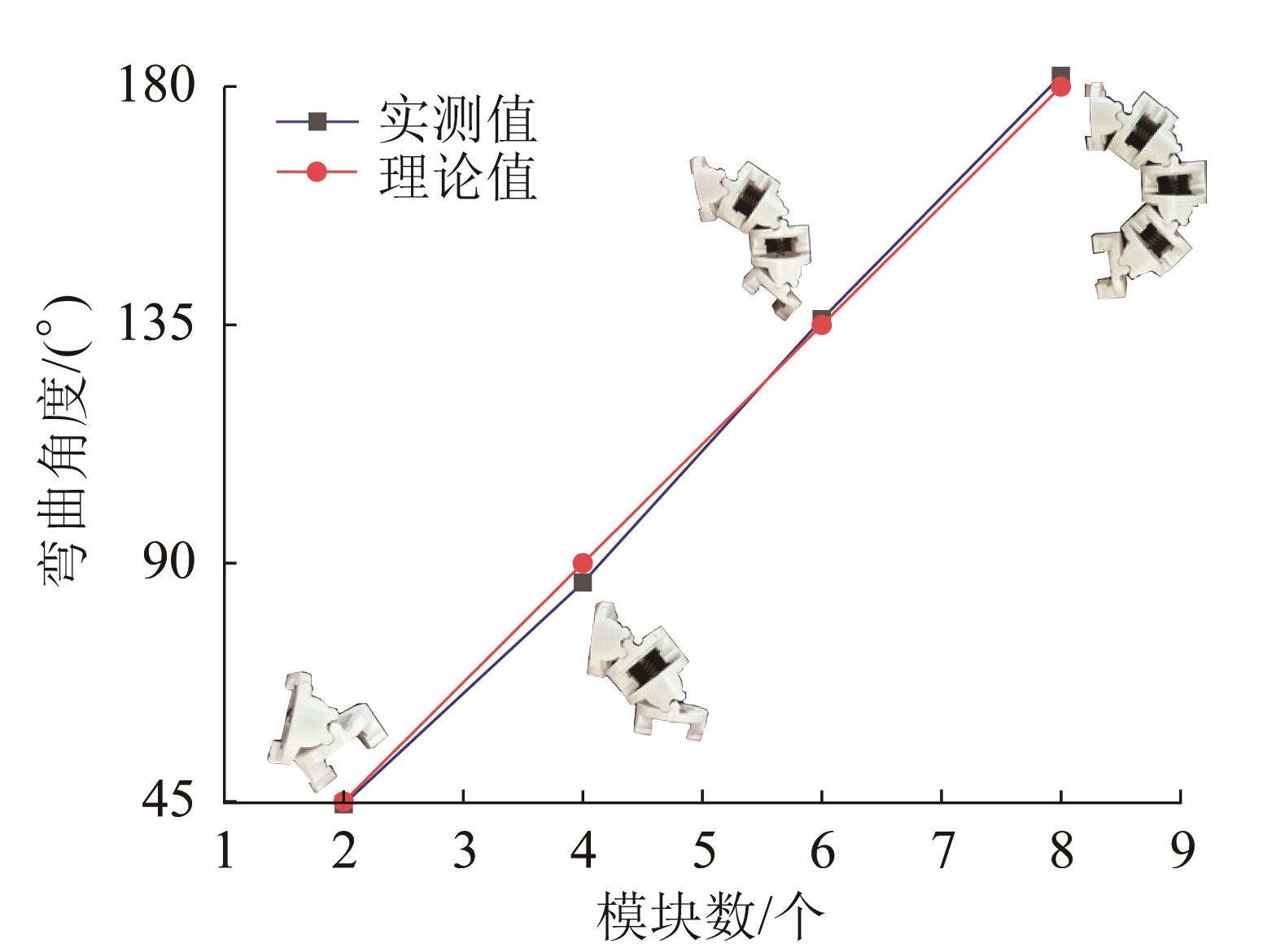
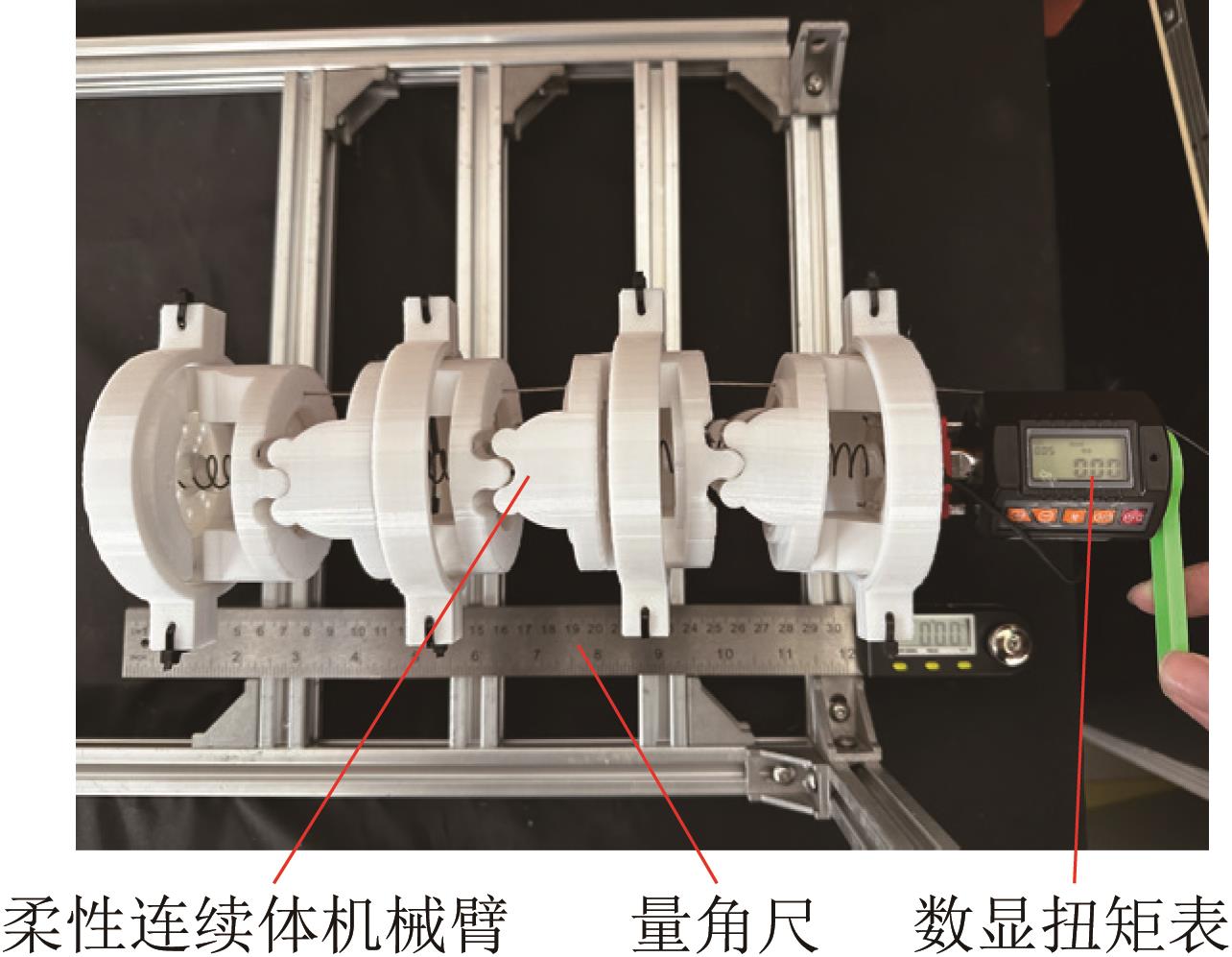
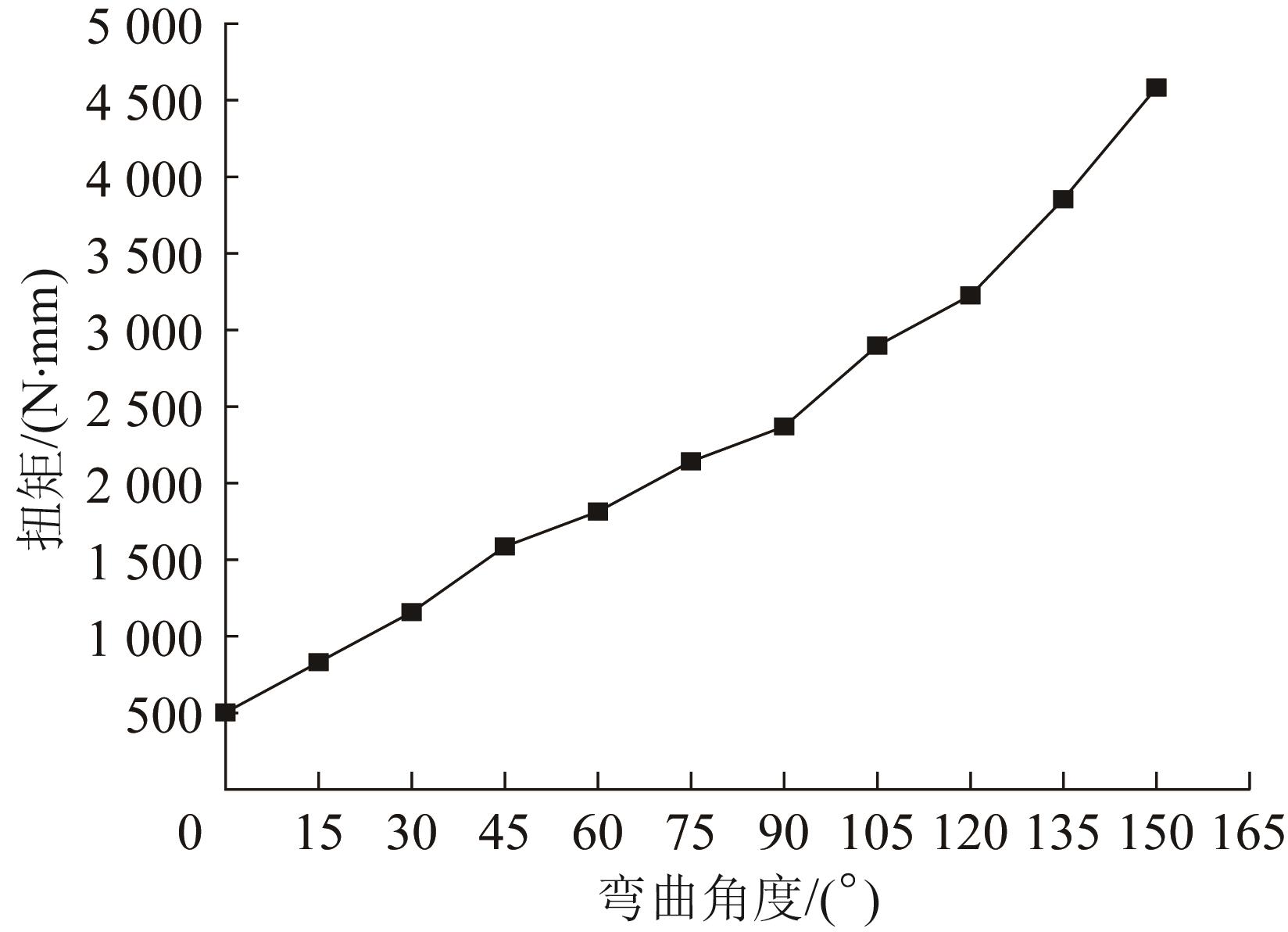
为实现连续体机械臂的多模态运动,解决现有机械臂只能实现单一弯曲或旋转的问题,设计了一种基于滚动接触的单模块多自由度柔性连续体机械臂。将滚动接触模块作为连续体机械臂弯曲模块的骨架结构,并在弯曲模块内安装旋转模块,以形成具备独立弯曲和旋转运动的多自由度机械臂。采用分段常曲率法建立连续体机械臂的运动学模型,对其刚度性能、弯曲性能和旋转性能进行了分析。制备了连续体机械臂样机,并开展机械臂拧松瓶盖、开启风扇以及在三维空间内避开障碍物抓取目标物体等实验。实验结果表明,利用连续体机械臂的弯曲与旋转组合运动可完成复杂空间环境下的不同任务,体现了复合运动模式的优势。所设计的连续体机械臂具备多模态运动,可为多自由度连续体机械臂的设计提供新思路,拓展了连续体机械臂的应用场景。
关键词:
柔性连续体机械臂,
单模块,
滚动接触,
多模态运动
|
|
| [1] |
朱文斌,李俊,杨进兴,等.基于重力补偿与滤波模型的工业机械臂打磨技术的研究[J].工业控制计算机,2021,34(8):67-69. doi:10.3969/j.issn.1001-182X.2021.08.024
ZHU W B, LI J, YANG J X, et al. Research on polishing technology of industrial mechanical ARM based on gravity compensation and filter model[J]. Industrial Control Computer, 2021, 34(8): 67-69.
doi: 10.3969/j.issn.1001-182X.2021.08.024
|
|
|
| [2] |
莫柠锴.面向机械臂抓取应用的高精度目标6D位姿估计[D].深圳:中国科学院大学(中国科学院深圳先进技术研究院),2021.
MO N K. High-precision 6D pose estimation for manipulator grasping[D]. Shenzhen: University of Chinese Academy of Sciences (Shenzhen Institute of Advanced Technology,Chinese Academy of Sciences), 2021.
|
|
|
| [3] |
杨文龙.面向单孔腔镜手术的连续型机械臂及其运动建模的研究[D].哈尔滨:哈尔滨工业大学,2016.
YANG W L. Research on kinematic modeling of a continuum manipulator for signle port access laparoscopy surgery[D]. Harbin: Harbin Institute of Technology, 2016.
|
|
|
| [4] |
耿浩.面向狭小空间作业的绳驱超冗余机械臂结构设计与研究[D].沈阳:沈阳工业大学,2021.
GENG H. Structure design and research of rope driven hyper-redundant manipulator for narrow space operation[D]. Shenyang: Shenyang University of Technology, 2021.
|
|
|
| [5] |
牟宗高.面向狭小空间作业的超冗余机器人轨迹规划及控制研究[D].哈尔滨:哈尔滨工业大学,2017.
MOU Z G. Research on trajectory planning and control of hyper-redundant robots for confined-space operations[D]. Harbin: Harbin Institute of Technology, 2017.
|
|
|
| [6] |
刘天亮.面向狭小空间作业的绳索驱动超冗余机械臂的研究[D].哈尔滨:哈尔滨工业大学,2016. doi:10.18869/acadpub.jafm.68.236.25086
LIU T L. A study on the cable-driven and hyper redundant manipulator for the narrow space operations[D]. Harbin: Harbin Institute of Technology, 2016.
doi: 10.18869/acadpub.jafm.68.236.25086
|
|
|
| [7] |
朱晓俊,王学谦,马云萱,等.绳驱超冗余空间柔性机械臂遥操作系统设计与实验研究[J].机器人,2022,44(1):9-18. doi:10.13973/j.cnki.robot.210228
ZHU X J, WANG X Q, MA Y X, et al. Design and experimental study on the teleoperation system for cable-driven and hyper-redundant space flexible manipulator[J]. Robot, 2022, 44(1): 9-18.
doi: 10.13973/j.cnki.robot.210228
|
|
|
| [8] |
符海明.面向空间应用的连续型绳驱柔性机械臂设计[D]. 哈尔滨:哈尔滨工业大学,2019.
FU H M. Design of continuous flexible cable-driven manipulator for outer space application[D]. Harbin: Harbin Institute of Technology, 2019.
|
|
|
| [9] |
王剑,李成刚,岳云双,等.面向航天器零部件装配的机械臂混合控制策略[J].航空科学技术,2022,33(2):90-96.
WANG J, LI C G, YUE Y S, et al. Hybrid control strategy of manipulator for spacecraft component assembly[J]. Aeronautical Science & Technology, 2022, 33(2): 90-96.
|
|
|
| [10] |
RICH S I, WOOD R J, MAJIDI C. Untethered soft robotics[J]. Nature Electronics, 2018, 1: 102-112.
|
|
|
| [11] |
MANTI M, CACUCCIOLO V, CIANCHETTI M. Stiffening in soft robotics: a review of the state of the art[J]. IEEE Robotics & Automation Magazine, 2016, 23(3): 93-106.
|
|
|
| [12] |
HAWKES E W, BLUMENSCHEIN L H, GREER J D, et al. A soft robot that navigates its environment through growth[J]. Science Robotics, 2017, 2(8): eaan3028.
|
|
|
| [13] |
MORIMOTO Y, ONOE H, TAKEUCHI S. Biohybrid robot powered by an antagonistic pair of skeletal muscle tissues[J]. Science Robotics, 2017, 3(18): eaat4440.
|
|
|
| [14] |
WANG M F, PALMER D, DONG X, et al. Design and development of a slender dual-structure continuum robot for in-situ aeroengine repair[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid, Oct. 1-5, 2018.
|
|
|
| [15] |
HALVERSON P A, HOWELL L L, MAGLEBY S P. Tension-based multi-stable compliant rolling-contact elements[J]. Mechanism and Machine Theory, 2010, 45(2): 147-156.
|
|
|
| [16] |
HANNAN M W, WALKER I D. Kinematics and the implementation of an elephant’s trunk manipulator and other continuum style robots[J]. Journal of Robotic Systems, 2003, 20(2): 45-63.
|
|
|
| [17] |
MORALES BIEZE T, KRUSZEWSKI A, CARREZ B, et al. Design, implementation, and control of a deformable manipulator robot based on a compliant spine[J]. The International Journal of Robotics Research, 2020, 39(14): 1604-1619.
|
|
|
| [18] |
牛景达.具有旋转运动的连续体机械臂设计及性能分析 [D].赣州:江西理工大学,2022:3-40.
NIU J D. Design and performance analysis of continuum manipulator with rotating motion[D]. Ganzhou: Jiangxi University of Science and Technology, 2022: 3-40.
|
|
|
| [19] |
WALKER I D, DAWSON D M, FLASH T, et al. Continuum robot arms inspired by cephalopods[C]//Proceedings Volume 5804, Unmanned Ground Vehicle Technology VII. Orlando, Florida, May 27, 2005.
|
|
|
| [20] |
McMAHAN W, JONES B A, WALKER I D. Design and implementation of a multi-section continuum robot: Air-Octor[C]//2005 IEEE/RSJ International Conference on Intelligent Robots and Systems. Edmonton, AB, Aug. 2-6, 2005.
|
|
|
| [21] |
McMAHAN W, CHITRAKARAN V, CSENCSITS M, et al. Field trials and testing of the OctArm continuum manipulator[C]//Proceedings of the 2006 IEEE International Conference on Robotics and Automation. Orlando, FL, May 15-19, 2006.
|
|
|
| [22] |
CHEN X Q, ZHANG X, LIU H, et al. Design and development of a soft robotic manipulator[J]. International Journal of Mechanics and Materials in Design, 2020, 16(2): 309-321.
|
|
|
| [23] |
ZHANG Z, TANG S J, FAN W C, et al. Design and analysis of hybrid-driven origami continuum robots with extensible and stiffness-tunable sections[J]. Mechanism and Machine Theory, 2022, 169: 104607.
|
|
|
| [24] |
MONTIERTH J R, TODD R H, HOWELL L L. Analysis of elliptical rolling contact joints in compression[J]. Journal of Mechanical Design, 2011, 133(3): 031001.
|
|
|
| [25] |
KIM Y J, CHENG S B, KIM S, et al. A stiffness-adjustable hyperredundant manipulator using a variable neutral-line mechanism for minimally invasive surgery[J]. IEEE Transactions on Robotics, 2014, 30(2): 382-395.
|
|
|
| [26] |
KIMURA N, IWATSUKI N. Spatial rolling contact pair generating the specified relative motion between links[M]//Lecture Notes in Electrical Engineering. Singapore: Springer Singapore, 2016: 307-316.
|
|
|
| [27] |
SUH J, KIM K, JEONG J, et al. Design considerations for a hyper-redundant pulleyless rolling joint with elastic fixtures[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(6): 2841-2852.
|
|
|
| [28] |
董栋.基于滚动接触的机器人设计与运动分析[D].赣州:江西理工大学,2023.
DONG D. Design and motion analysis of continuous robot based on rolling contact[D]. Ganzhou: Jiangxi University of Science and Technology, 2023.
|
|
|
| [29] |
JONES B A, WALKER I D. Kinematics for multisection continuum robots[J]. IEEE Transactions on Robotics, 2006, 22(1): 43-55.
|
|
|
| [30] |
CHAWLA A. FRAZELLE C, WALKER I. A comparison of constant curvature forward kinematics for multisection continuum manipulators[C]//2018 Second IEEE International Conference on Robotic Computing (IRC). Laguna Hills, CA, Jan. 31-Feb. 2, 2018.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|