(7) $ \begin{split} & {F_{y \text{fl,FF}}} = {n_{\text{fl}}}\frac{{mb}}{L}{a_{y, \text{des}}},\;{F_{y \text{fr,FF}}} = {n_{\text{fr}}}\frac{{mb}}{L}{a_{y, \text{des}}}, \\ & {F_{y \text{rl,FF}}} = {n_{\text{rl}}}\frac{{ma}}{L}{a_{y, \text{des}}},\;{F_{y{\rm{rr}},{\rm{FF}}}} = {n_{{\rm{rr}}}}\frac{{ma}}{L}{a_{y, \text{des}}}. \\[-6pt] \end{split} $
(8) $\begin{split} & {\alpha }_{{\rm{f}}, {\rm{FF}}}={n}_{\text{fl}}{f}^{-1}({F}_{z\text{fl}},{F}_{y \text{fl,FF}})+{n}_{\text{fr}}{f}^{-1}({F}_{z\text{fr}},{F}_{y \text{fr,FF}}),\\ & {\alpha }_{{\rm{r}},{\rm{FF}}}={n}_{\text{rl}}{f}^{-1}({F}_{z\text{rl}},{F}_{y \text{rl,FF}})+{n}_{{\rm{rr}}}{f}^{-1}({F}_{z\text{rr}},{F}_{y{\rm{rr}},{\rm{FF}}}). \end{split} $
其中 $ {f}^{-1}({F}_{{z{\rm{fl}}}},{F}_{{y{{\rm{fl,FF}}}}}) $ $ {f}^{-1}({F}_{{z{\rm{fr}}}},{F}_{{y}{{\rm{fr,FF}}}}) $ $ {f}^{-1}({F}_{{z}{{\rm{rl}}}}, {F}_{{y}{{\rm{rl,FF}}}}) $ ${f}^{-1}\left({{F}_{z{\rm{rr}}},F}_{y {\rm{rr,FF}}}\right)$
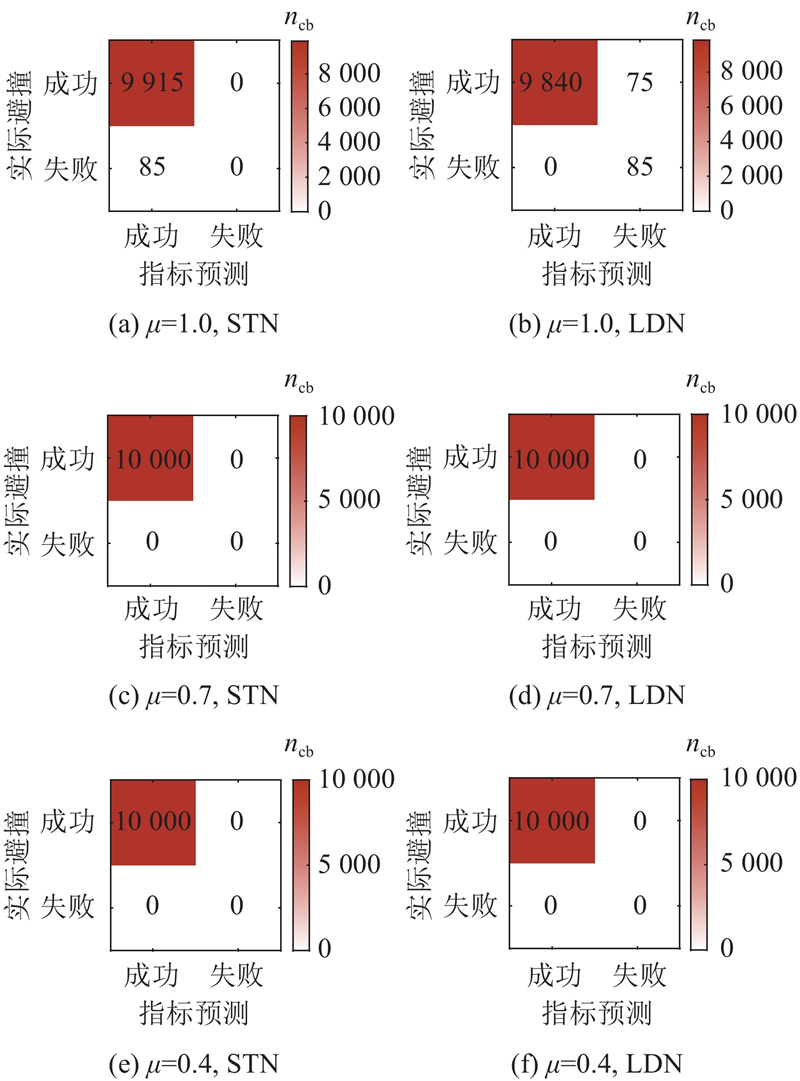
为了验证LDN在一般工况下的适用性,在 $ \;\mu =1.0 $ $ \;\mu =0.7 $ $ \;\mu =0.4 $ 图17 所示. 分析可知,在一般工况中,STN及LDN均能准确判断当前工况能否完成避撞,说明LDN具有该工况的适用性.
[12]
杨秀建. 极限工况下汽车转向失稳的非线性动力学特性与主动控制研究[D]. 济南: 山东大学, 2009.
[本文引用: 1]
YANG Xiu-jian. Research on the nonlinear dynamics and active control for vehicle cornering destabilization in critical situations [D]. Jinan: Shandong University, 2009.
[本文引用: 1]
[13]
PACEJKA H B. Tyre and vehicle dynamics [M]. [S.l.]: Elsevier, 2006.
[本文引用: 6]
[14]
李小雨. 复合工况下分布式驱动电动汽车失稳机理及操纵稳定性控制研究[D]. 长春: 吉林大学, 2020.
[本文引用: 4]
LI Xiao-yun. Research on instability mechanism and handling stability control of distributed drive electric vehicles under combined slip condition [D]. Changchun: Jilin University, 2020.
[本文引用: 4]
[15]
GAO Y, GORDON T, LIDBERG M Optimal control of brakes and steering for autonomous collision avoidance using modified Hamiltonian algorithm
[J]. International Journal of Vehicle Mechanics and Mobility , 2019 , 57 (8 ): 1224 - 1240
[本文引用: 2]
[16]
MATSUBAYASHI K, YAMAD Y, IYODA M, et al. Development of rear pre-crash safety system for rear-end collisions [C]// 20th International Technical Conference on the Enhanced Safety of Vehicles . Lyon: [s.n.], 2007.
[本文引用: 1]
[17]
GIUGIANNI M. The science of vehicle dynamics: handling, braking, and ride of road and race cars [M]. [S.l.]: Springer, 2014.
[本文引用: 2]
[18]
HAMMERSLEY J. Monte carlo methods [M]. [S.l.]: Springer, 2013.
[本文引用: 1]
[19]
FENG S, FENG Y, YU C, et al Testing scenario library generation for connected and automated vehicles, part I: methodology
[J]. IEEE Transactions on Intelligent Transportation Systems , 2021 , 22 (3 ): 1573 - 1582
DOI:10.1109/TITS.2020.2972211
[本文引用: 1]
[1]
PICCININI G B, ENGSTRÖM J, BÄRGMAN J, et al Factors contributing to commercial vehicle rear-end conflicts in China: a study using on-board event data recorders
[J]. Journal of Safety Research , 2017 , 62 : 143 - 153
DOI:10.1016/j.jsr.2017.06.004
[本文引用: 1]
[2]
崔庆佳. 面向高速紧急工况的车辆避撞多目标协调控制研究[D]. 长沙: 湖南大学, 2020.
[本文引用: 1]
CUI Qing-jia. Research on multi-objective coordinated control strategies for vehicle collision-avoidance in highway driving [D]. Changsha: Hunan University, 2020.
[本文引用: 1]
[3]
SHAH J, BEST M, BENMIMOUN A, et al Autonomous rear-end collision avoidance using an electric power steering system
[J]. Journal of Automobile Engineering , 2015 , 229 (12 ): 1638 - 1655
DOI:10.1177/0954407014567517
[本文引用: 1]
[4]
JANSSON J. Collision avoidance theory: with application to automotive collision mitigation [D]. Linköping: Linköping University, 2005.
[本文引用: 1]
[5]
KAPANIA N R, GERDES J C Design of a feedback-feedforward steering controller for accurate path tracking and stability at the limits of handling
[J]. International Journal of Vehicle Mechanics and Mobility , 2015 , 53 (12 ): 1687 - 1704
[本文引用: 3]
[6]
CUI Q, DING R, WU X, et al A new strategy for rear-end collision avoidance via autonomous steering and differential braking in highway driving
[J]. International Journal of Vehicle Mechanics and Mobility , 2020 , 58 (6 ): 955 - 986
[本文引用: 6]
[7]
来飞, 叶心. 汽车高速行驶时自动紧急转向避撞的前馈与反馈跟踪控制的研究[J]. 汽车工程, 2020, 42(10): 1404-1411.
[本文引用: 1]
LAI Fei, YE Xin. Research on feedforward and feedback tracking control for automatic emergency steering collision avoidance in vehicle high-speed driving [J] Automotive Engineering , 2020, 42(10): 1404-1411.
[本文引用: 1]
[8]
BRANNSTROM M, SJOBERG J, COELINGH E. A situation and threat assessment algorithm for a rear-end collision avoidance system [C]// IEEE Intelligent Vehicles Symposium . Eindhoven: IEEE, 2008: 102-107.
[本文引用: 1]
[9]
NILSSON J, ÖDBLOM A C E, FREDRIKSSON J Worst-case analysis of automotive collision avoidance systems
[J]. IEEE Transactions on Vehicular Technology , 2015 , 65 (4 ): 1899 - 1911
[本文引用: 1]
[10]
HOSSEINI S, MURGOVSKI N, DE CAMPOS G R, et al. Adaptive forward collision warning algorithm for automotive applications [C]// 2016 American Control Conference . Boston: 2016: 5982-5987.
[本文引用: 2]
[11]
CUI Q, DING R, WEI C, et al A hierarchical framework of emergency collision avoidance amid surrounding vehicles in highway driving
[J]. Control Engineering Practice , 2021 , 109 : 104751
DOI:10.1016/j.conengprac.2021.104751
[本文引用: 1]
1
... 在转向避撞的过程中,常采用基于规则的决策方法,由评价指标确定不同场景的介入准则. 其中转向风险指数(steer threat number, STN)通过车辆避撞所需侧向加速度和最大侧向加速度的比值来描述车辆在路面附着约束下的转向避撞能力,能够较好地反映车辆的侧向加速能力,获得了广泛应用[8 ] . Nilsson等[9 ] 通过STN确定了车辆的临界避撞效果,明确了主动避撞系统的工作范围. Hosseini等[10 ] 在原有STN的基础上增加车速自适应的预测环节,在不增加预警系统误报率的同时实现了提前预警. Cui等[6 ] 通过碰撞时间(time to collision, TTC)、制动风险指数(brake threat number, BTN)、STN的分层逻辑判断,确定了单车道高速场景下制动和转向避撞的不同介入时机. 在此基础上,Cui等[11 ] 通过有限状态机的方式划分邻车道有车场景下的车辆行驶区域,并提出“车-路”耦合威胁评估模型,建立避撞系统在各状态的介入准则和各避撞方式的切换条件. 以上对于评价指标的研究进行了车辆点质量模型假设,且通常根据路面附着约束以稳态侧向加速度进行车辆转向避撞能力的评估,忽略了车辆特性对车辆转向能力的影响以及高速转向过程车辆的强非线性和瞬态特性. 具体表现为1)车辆在高速大转向的极限工况表现出强烈的非线性,此时车辆具有较大的加速度且轮胎力接近饱和[12 ] ,Pacejka等[13 -14 ] 分析了转向过程中轮胎侧偏角变化趋势,认为对于具有不足转向特性的车辆,在纯侧偏稳态转向时,前轮侧偏角大于后轮,因此前轮会先于后轮达到饱和,最终车辆的稳定侧向加速度应由前轮决定,对于具有过多转向特性的车辆则相反[13 -14 ] . 因此车辆通常难以达到路面附着系数限制的最大稳态加速度. 2)在极限工况,车辆表现出高度的瞬态特性[15 ] ,车辆稳态加速度行驶的时间在整个避撞过程中的时间占比较少. 本研究提出将侧向位移指数(lateral displacement number, LDN)作为适用于车辆极限工况的转向风险指数,LDN的定义为车辆避撞所需侧向位移与最大可达侧向位移的比值,通过阶跃转向实验模拟转向避撞获得最大可达侧向位移,从而反映高速转向过程的非线性并包含转向的瞬态过程. 以侧向位移作为避撞条件可以更直接、准确地反映车辆的避撞条件和在极限工况的转向避撞能力. ...
1
... 在转向避撞的过程中,常采用基于规则的决策方法,由评价指标确定不同场景的介入准则. 其中转向风险指数(steer threat number, STN)通过车辆避撞所需侧向加速度和最大侧向加速度的比值来描述车辆在路面附着约束下的转向避撞能力,能够较好地反映车辆的侧向加速能力,获得了广泛应用[8 ] . Nilsson等[9 ] 通过STN确定了车辆的临界避撞效果,明确了主动避撞系统的工作范围. Hosseini等[10 ] 在原有STN的基础上增加车速自适应的预测环节,在不增加预警系统误报率的同时实现了提前预警. Cui等[6 ] 通过碰撞时间(time to collision, TTC)、制动风险指数(brake threat number, BTN)、STN的分层逻辑判断,确定了单车道高速场景下制动和转向避撞的不同介入时机. 在此基础上,Cui等[11 ] 通过有限状态机的方式划分邻车道有车场景下的车辆行驶区域,并提出“车-路”耦合威胁评估模型,建立避撞系统在各状态的介入准则和各避撞方式的切换条件. 以上对于评价指标的研究进行了车辆点质量模型假设,且通常根据路面附着约束以稳态侧向加速度进行车辆转向避撞能力的评估,忽略了车辆特性对车辆转向能力的影响以及高速转向过程车辆的强非线性和瞬态特性. 具体表现为1)车辆在高速大转向的极限工况表现出强烈的非线性,此时车辆具有较大的加速度且轮胎力接近饱和[12 ] ,Pacejka等[13 -14 ] 分析了转向过程中轮胎侧偏角变化趋势,认为对于具有不足转向特性的车辆,在纯侧偏稳态转向时,前轮侧偏角大于后轮,因此前轮会先于后轮达到饱和,最终车辆的稳定侧向加速度应由前轮决定,对于具有过多转向特性的车辆则相反[13 -14 ] . 因此车辆通常难以达到路面附着系数限制的最大稳态加速度. 2)在极限工况,车辆表现出高度的瞬态特性[15 ] ,车辆稳态加速度行驶的时间在整个避撞过程中的时间占比较少. 本研究提出将侧向位移指数(lateral displacement number, LDN)作为适用于车辆极限工况的转向风险指数,LDN的定义为车辆避撞所需侧向位移与最大可达侧向位移的比值,通过阶跃转向实验模拟转向避撞获得最大可达侧向位移,从而反映高速转向过程的非线性并包含转向的瞬态过程. 以侧向位移作为避撞条件可以更直接、准确地反映车辆的避撞条件和在极限工况的转向避撞能力. ...
6
... 在转向避撞的过程中,常采用基于规则的决策方法,由评价指标确定不同场景的介入准则. 其中转向风险指数(steer threat number, STN)通过车辆避撞所需侧向加速度和最大侧向加速度的比值来描述车辆在路面附着约束下的转向避撞能力,能够较好地反映车辆的侧向加速能力,获得了广泛应用[8 ] . Nilsson等[9 ] 通过STN确定了车辆的临界避撞效果,明确了主动避撞系统的工作范围. Hosseini等[10 ] 在原有STN的基础上增加车速自适应的预测环节,在不增加预警系统误报率的同时实现了提前预警. Cui等[6 ] 通过碰撞时间(time to collision, TTC)、制动风险指数(brake threat number, BTN)、STN的分层逻辑判断,确定了单车道高速场景下制动和转向避撞的不同介入时机. 在此基础上,Cui等[11 ] 通过有限状态机的方式划分邻车道有车场景下的车辆行驶区域,并提出“车-路”耦合威胁评估模型,建立避撞系统在各状态的介入准则和各避撞方式的切换条件. 以上对于评价指标的研究进行了车辆点质量模型假设,且通常根据路面附着约束以稳态侧向加速度进行车辆转向避撞能力的评估,忽略了车辆特性对车辆转向能力的影响以及高速转向过程车辆的强非线性和瞬态特性. 具体表现为1)车辆在高速大转向的极限工况表现出强烈的非线性,此时车辆具有较大的加速度且轮胎力接近饱和[12 ] ,Pacejka等[13 -14 ] 分析了转向过程中轮胎侧偏角变化趋势,认为对于具有不足转向特性的车辆,在纯侧偏稳态转向时,前轮侧偏角大于后轮,因此前轮会先于后轮达到饱和,最终车辆的稳定侧向加速度应由前轮决定,对于具有过多转向特性的车辆则相反[13 -14 ] . 因此车辆通常难以达到路面附着系数限制的最大稳态加速度. 2)在极限工况,车辆表现出高度的瞬态特性[15 ] ,车辆稳态加速度行驶的时间在整个避撞过程中的时间占比较少. 本研究提出将侧向位移指数(lateral displacement number, LDN)作为适用于车辆极限工况的转向风险指数,LDN的定义为车辆避撞所需侧向位移与最大可达侧向位移的比值,通过阶跃转向实验模拟转向避撞获得最大可达侧向位移,从而反映高速转向过程的非线性并包含转向的瞬态过程. 以侧向位移作为避撞条件可以更直接、准确地反映车辆的避撞条件和在极限工况的转向避撞能力. ...
... [13 -14 ]. 因此车辆通常难以达到路面附着系数限制的最大稳态加速度. 2)在极限工况,车辆表现出高度的瞬态特性[15 ] ,车辆稳态加速度行驶的时间在整个避撞过程中的时间占比较少. 本研究提出将侧向位移指数(lateral displacement number, LDN)作为适用于车辆极限工况的转向风险指数,LDN的定义为车辆避撞所需侧向位移与最大可达侧向位移的比值,通过阶跃转向实验模拟转向避撞获得最大可达侧向位移,从而反映高速转向过程的非线性并包含转向的瞬态过程. 以侧向位移作为避撞条件可以更直接、准确地反映车辆的避撞条件和在极限工况的转向避撞能力. ...
... 基于以上分析,本研究1)提出考虑横向载荷转移的转向前馈控制方法以提高控制精度;2)定义最大前轮侧偏角对应的车辆侧向加速度作为该路面上的临界稳定侧向加速度[13 -14 ] ,并通过临界稳定工况的角阶跃转向实验得到车辆“纵向位移-纵向车速-最大侧向位移”图,建立LDN;3)在不同附着系数路面、不同侧向避撞距离下采用蒙特卡洛法随机生成10 000例高速紧急避撞场景,对比LDN、STN和实际避撞结果,验证LDN合理性. ...
... 考虑垂向载荷对轮胎侧向力的影响,建立垂向-侧向作用力耦合的非线性魔术公式轮胎模型[13 ] : ...
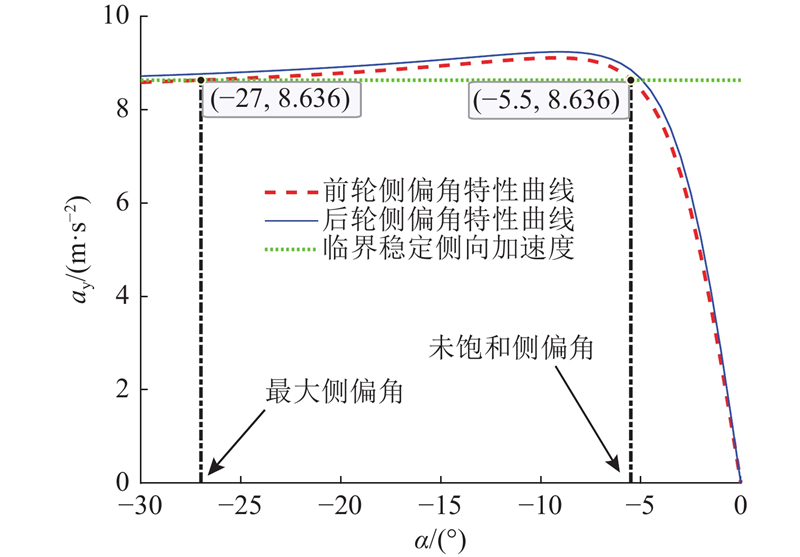
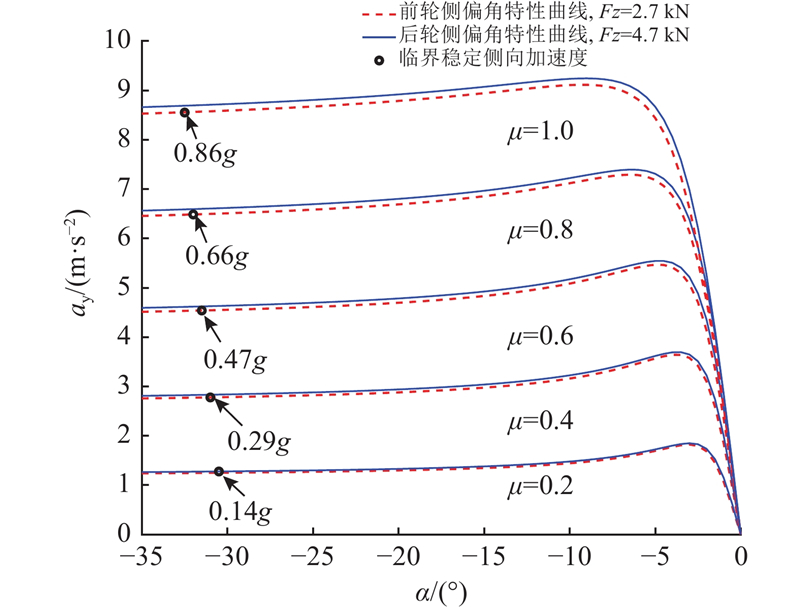
... 求解最大可达侧向位移须确定车辆稳定性边界,即车辆行驶的临界稳定侧向加速度. 对于具有不足转向特性的车辆,前轮会先于后轮达到饱和,车辆的临界稳定侧向加速度由前轮决定[13 -14 ] . 本研究以具有转向不足特性的车辆为研究目标,因此对前轮侧偏特性曲线进行分析,如图6 所示. 在较大侧向加速度下,轮胎侧偏角既可能在未饱和区也可能在饱和区. 为了保证前轮不会进入饱和区,将最大前轮侧偏角对应的车辆侧向加速度作为该路面上的临界稳定侧向加速度[13 ] . 当车辆实际侧向加速度小于临界稳定侧向加速度,由于前轮侧偏角不可能在饱和区超出最大值进一步增大,则前轮侧偏角必定在未饱和区,此时车辆能够稳定行驶并保持正常的转向能力. ...
... [13 ]. 当车辆实际侧向加速度小于临界稳定侧向加速度,由于前轮侧偏角不可能在饱和区超出最大值进一步增大,则前轮侧偏角必定在未饱和区,此时车辆能够稳定行驶并保持正常的转向能力. ...
4
... 在转向避撞的过程中,常采用基于规则的决策方法,由评价指标确定不同场景的介入准则. 其中转向风险指数(steer threat number, STN)通过车辆避撞所需侧向加速度和最大侧向加速度的比值来描述车辆在路面附着约束下的转向避撞能力,能够较好地反映车辆的侧向加速能力,获得了广泛应用[8 ] . Nilsson等[9 ] 通过STN确定了车辆的临界避撞效果,明确了主动避撞系统的工作范围. Hosseini等[10 ] 在原有STN的基础上增加车速自适应的预测环节,在不增加预警系统误报率的同时实现了提前预警. Cui等[6 ] 通过碰撞时间(time to collision, TTC)、制动风险指数(brake threat number, BTN)、STN的分层逻辑判断,确定了单车道高速场景下制动和转向避撞的不同介入时机. 在此基础上,Cui等[11 ] 通过有限状态机的方式划分邻车道有车场景下的车辆行驶区域,并提出“车-路”耦合威胁评估模型,建立避撞系统在各状态的介入准则和各避撞方式的切换条件. 以上对于评价指标的研究进行了车辆点质量模型假设,且通常根据路面附着约束以稳态侧向加速度进行车辆转向避撞能力的评估,忽略了车辆特性对车辆转向能力的影响以及高速转向过程车辆的强非线性和瞬态特性. 具体表现为1)车辆在高速大转向的极限工况表现出强烈的非线性,此时车辆具有较大的加速度且轮胎力接近饱和[12 ] ,Pacejka等[13 -14 ] 分析了转向过程中轮胎侧偏角变化趋势,认为对于具有不足转向特性的车辆,在纯侧偏稳态转向时,前轮侧偏角大于后轮,因此前轮会先于后轮达到饱和,最终车辆的稳定侧向加速度应由前轮决定,对于具有过多转向特性的车辆则相反[13 -14 ] . 因此车辆通常难以达到路面附着系数限制的最大稳态加速度. 2)在极限工况,车辆表现出高度的瞬态特性[15 ] ,车辆稳态加速度行驶的时间在整个避撞过程中的时间占比较少. 本研究提出将侧向位移指数(lateral displacement number, LDN)作为适用于车辆极限工况的转向风险指数,LDN的定义为车辆避撞所需侧向位移与最大可达侧向位移的比值,通过阶跃转向实验模拟转向避撞获得最大可达侧向位移,从而反映高速转向过程的非线性并包含转向的瞬态过程. 以侧向位移作为避撞条件可以更直接、准确地反映车辆的避撞条件和在极限工况的转向避撞能力. ...
... -14 ]. 因此车辆通常难以达到路面附着系数限制的最大稳态加速度. 2)在极限工况,车辆表现出高度的瞬态特性[15 ] ,车辆稳态加速度行驶的时间在整个避撞过程中的时间占比较少. 本研究提出将侧向位移指数(lateral displacement number, LDN)作为适用于车辆极限工况的转向风险指数,LDN的定义为车辆避撞所需侧向位移与最大可达侧向位移的比值,通过阶跃转向实验模拟转向避撞获得最大可达侧向位移,从而反映高速转向过程的非线性并包含转向的瞬态过程. 以侧向位移作为避撞条件可以更直接、准确地反映车辆的避撞条件和在极限工况的转向避撞能力. ...
... 基于以上分析,本研究1)提出考虑横向载荷转移的转向前馈控制方法以提高控制精度;2)定义最大前轮侧偏角对应的车辆侧向加速度作为该路面上的临界稳定侧向加速度[13 -14 ] ,并通过临界稳定工况的角阶跃转向实验得到车辆“纵向位移-纵向车速-最大侧向位移”图,建立LDN;3)在不同附着系数路面、不同侧向避撞距离下采用蒙特卡洛法随机生成10 000例高速紧急避撞场景,对比LDN、STN和实际避撞结果,验证LDN合理性. ...
... 求解最大可达侧向位移须确定车辆稳定性边界,即车辆行驶的临界稳定侧向加速度. 对于具有不足转向特性的车辆,前轮会先于后轮达到饱和,车辆的临界稳定侧向加速度由前轮决定[13 -14 ] . 本研究以具有转向不足特性的车辆为研究目标,因此对前轮侧偏特性曲线进行分析,如图6 所示. 在较大侧向加速度下,轮胎侧偏角既可能在未饱和区也可能在饱和区. 为了保证前轮不会进入饱和区,将最大前轮侧偏角对应的车辆侧向加速度作为该路面上的临界稳定侧向加速度[13 ] . 当车辆实际侧向加速度小于临界稳定侧向加速度,由于前轮侧偏角不可能在饱和区超出最大值进一步增大,则前轮侧偏角必定在未饱和区,此时车辆能够稳定行驶并保持正常的转向能力. ...
4
... 在转向避撞的过程中,常采用基于规则的决策方法,由评价指标确定不同场景的介入准则. 其中转向风险指数(steer threat number, STN)通过车辆避撞所需侧向加速度和最大侧向加速度的比值来描述车辆在路面附着约束下的转向避撞能力,能够较好地反映车辆的侧向加速能力,获得了广泛应用[8 ] . Nilsson等[9 ] 通过STN确定了车辆的临界避撞效果,明确了主动避撞系统的工作范围. Hosseini等[10 ] 在原有STN的基础上增加车速自适应的预测环节,在不增加预警系统误报率的同时实现了提前预警. Cui等[6 ] 通过碰撞时间(time to collision, TTC)、制动风险指数(brake threat number, BTN)、STN的分层逻辑判断,确定了单车道高速场景下制动和转向避撞的不同介入时机. 在此基础上,Cui等[11 ] 通过有限状态机的方式划分邻车道有车场景下的车辆行驶区域,并提出“车-路”耦合威胁评估模型,建立避撞系统在各状态的介入准则和各避撞方式的切换条件. 以上对于评价指标的研究进行了车辆点质量模型假设,且通常根据路面附着约束以稳态侧向加速度进行车辆转向避撞能力的评估,忽略了车辆特性对车辆转向能力的影响以及高速转向过程车辆的强非线性和瞬态特性. 具体表现为1)车辆在高速大转向的极限工况表现出强烈的非线性,此时车辆具有较大的加速度且轮胎力接近饱和[12 ] ,Pacejka等[13 -14 ] 分析了转向过程中轮胎侧偏角变化趋势,认为对于具有不足转向特性的车辆,在纯侧偏稳态转向时,前轮侧偏角大于后轮,因此前轮会先于后轮达到饱和,最终车辆的稳定侧向加速度应由前轮决定,对于具有过多转向特性的车辆则相反[13 -14 ] . 因此车辆通常难以达到路面附着系数限制的最大稳态加速度. 2)在极限工况,车辆表现出高度的瞬态特性[15 ] ,车辆稳态加速度行驶的时间在整个避撞过程中的时间占比较少. 本研究提出将侧向位移指数(lateral displacement number, LDN)作为适用于车辆极限工况的转向风险指数,LDN的定义为车辆避撞所需侧向位移与最大可达侧向位移的比值,通过阶跃转向实验模拟转向避撞获得最大可达侧向位移,从而反映高速转向过程的非线性并包含转向的瞬态过程. 以侧向位移作为避撞条件可以更直接、准确地反映车辆的避撞条件和在极限工况的转向避撞能力. ...
... -14 ]. 因此车辆通常难以达到路面附着系数限制的最大稳态加速度. 2)在极限工况,车辆表现出高度的瞬态特性[15 ] ,车辆稳态加速度行驶的时间在整个避撞过程中的时间占比较少. 本研究提出将侧向位移指数(lateral displacement number, LDN)作为适用于车辆极限工况的转向风险指数,LDN的定义为车辆避撞所需侧向位移与最大可达侧向位移的比值,通过阶跃转向实验模拟转向避撞获得最大可达侧向位移,从而反映高速转向过程的非线性并包含转向的瞬态过程. 以侧向位移作为避撞条件可以更直接、准确地反映车辆的避撞条件和在极限工况的转向避撞能力. ...
... 基于以上分析,本研究1)提出考虑横向载荷转移的转向前馈控制方法以提高控制精度;2)定义最大前轮侧偏角对应的车辆侧向加速度作为该路面上的临界稳定侧向加速度[13 -14 ] ,并通过临界稳定工况的角阶跃转向实验得到车辆“纵向位移-纵向车速-最大侧向位移”图,建立LDN;3)在不同附着系数路面、不同侧向避撞距离下采用蒙特卡洛法随机生成10 000例高速紧急避撞场景,对比LDN、STN和实际避撞结果,验证LDN合理性. ...
... 求解最大可达侧向位移须确定车辆稳定性边界,即车辆行驶的临界稳定侧向加速度. 对于具有不足转向特性的车辆,前轮会先于后轮达到饱和,车辆的临界稳定侧向加速度由前轮决定[13 -14 ] . 本研究以具有转向不足特性的车辆为研究目标,因此对前轮侧偏特性曲线进行分析,如图6 所示. 在较大侧向加速度下,轮胎侧偏角既可能在未饱和区也可能在饱和区. 为了保证前轮不会进入饱和区,将最大前轮侧偏角对应的车辆侧向加速度作为该路面上的临界稳定侧向加速度[13 ] . 当车辆实际侧向加速度小于临界稳定侧向加速度,由于前轮侧偏角不可能在饱和区超出最大值进一步增大,则前轮侧偏角必定在未饱和区,此时车辆能够稳定行驶并保持正常的转向能力. ...
Optimal control of brakes and steering for autonomous collision avoidance using modified Hamiltonian algorithm
2
2019
... 在转向避撞的过程中,常采用基于规则的决策方法,由评价指标确定不同场景的介入准则. 其中转向风险指数(steer threat number, STN)通过车辆避撞所需侧向加速度和最大侧向加速度的比值来描述车辆在路面附着约束下的转向避撞能力,能够较好地反映车辆的侧向加速能力,获得了广泛应用[8 ] . Nilsson等[9 ] 通过STN确定了车辆的临界避撞效果,明确了主动避撞系统的工作范围. Hosseini等[10 ] 在原有STN的基础上增加车速自适应的预测环节,在不增加预警系统误报率的同时实现了提前预警. Cui等[6 ] 通过碰撞时间(time to collision, TTC)、制动风险指数(brake threat number, BTN)、STN的分层逻辑判断,确定了单车道高速场景下制动和转向避撞的不同介入时机. 在此基础上,Cui等[11 ] 通过有限状态机的方式划分邻车道有车场景下的车辆行驶区域,并提出“车-路”耦合威胁评估模型,建立避撞系统在各状态的介入准则和各避撞方式的切换条件. 以上对于评价指标的研究进行了车辆点质量模型假设,且通常根据路面附着约束以稳态侧向加速度进行车辆转向避撞能力的评估,忽略了车辆特性对车辆转向能力的影响以及高速转向过程车辆的强非线性和瞬态特性. 具体表现为1)车辆在高速大转向的极限工况表现出强烈的非线性,此时车辆具有较大的加速度且轮胎力接近饱和[12 ] ,Pacejka等[13 -14 ] 分析了转向过程中轮胎侧偏角变化趋势,认为对于具有不足转向特性的车辆,在纯侧偏稳态转向时,前轮侧偏角大于后轮,因此前轮会先于后轮达到饱和,最终车辆的稳定侧向加速度应由前轮决定,对于具有过多转向特性的车辆则相反[13 -14 ] . 因此车辆通常难以达到路面附着系数限制的最大稳态加速度. 2)在极限工况,车辆表现出高度的瞬态特性[15 ] ,车辆稳态加速度行驶的时间在整个避撞过程中的时间占比较少. 本研究提出将侧向位移指数(lateral displacement number, LDN)作为适用于车辆极限工况的转向风险指数,LDN的定义为车辆避撞所需侧向位移与最大可达侧向位移的比值,通过阶跃转向实验模拟转向避撞获得最大可达侧向位移,从而反映高速转向过程的非线性并包含转向的瞬态过程. 以侧向位移作为避撞条件可以更直接、准确地反映车辆的避撞条件和在极限工况的转向避撞能力. ...
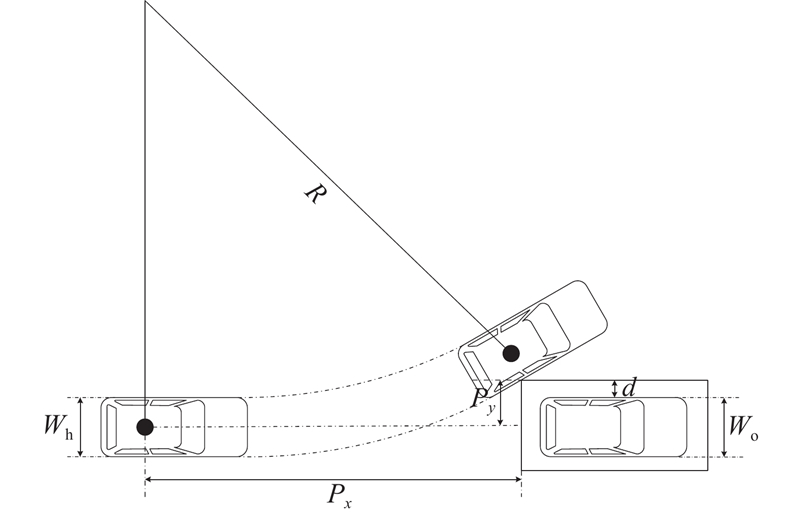
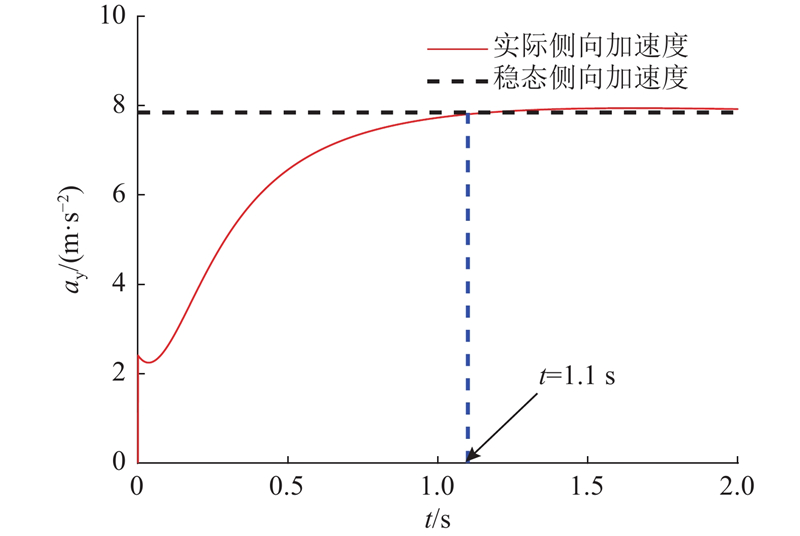
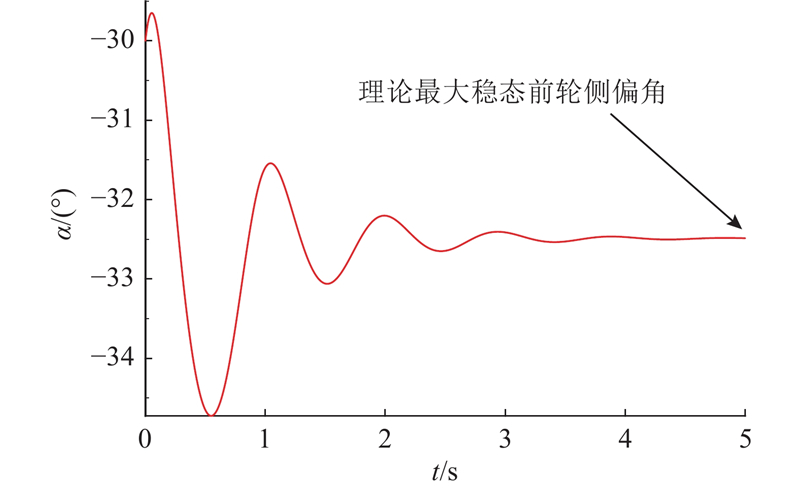
... 如图3 所示为以恒定侧向加速度进行圆周转向的避撞过程示意. 图中, $ {W}_{\mathrm{h}} $ $ {W}_{\mathrm{o}} $ $ {P}_{{y}} $ $ {P}_{{y}}=0.5{W}_{\mathrm{o}}+d, $ $ d $ $ {P}_{{x}} $ [15 ] . 如图4 所示,在角阶跃转向输入工况下,从车辆开始转向到车辆侧向加速度达到稳态值的时间为1.1 s;在高速紧急避撞工况下,整个避撞过程的时间通常不超过2 s[16 ] . ...
1
... 如图3 所示为以恒定侧向加速度进行圆周转向的避撞过程示意. 图中, $ {W}_{\mathrm{h}} $ $ {W}_{\mathrm{o}} $ $ {P}_{{y}} $ $ {P}_{{y}}=0.5{W}_{\mathrm{o}}+d, $ $ d $ $ {P}_{{x}} $ [15 ] . 如图4 所示,在角阶跃转向输入工况下,从车辆开始转向到车辆侧向加速度达到稳态值的时间为1.1 s;在高速紧急避撞工况下,整个避撞过程的时间通常不超过2 s[16 ] . ...
2
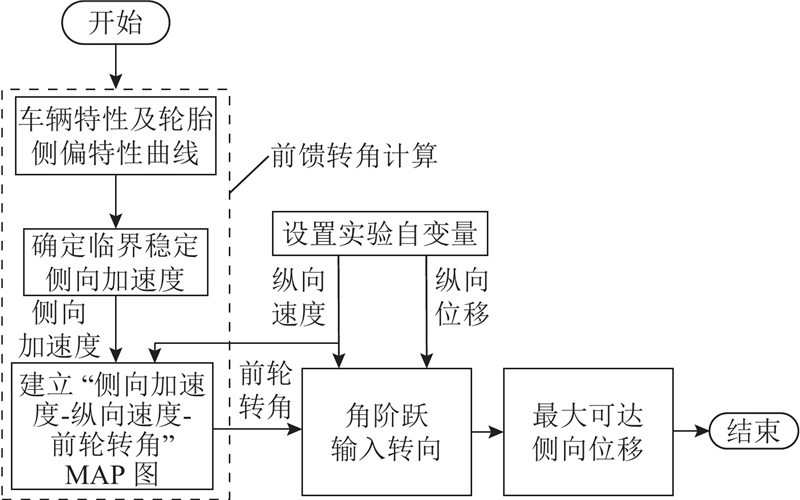
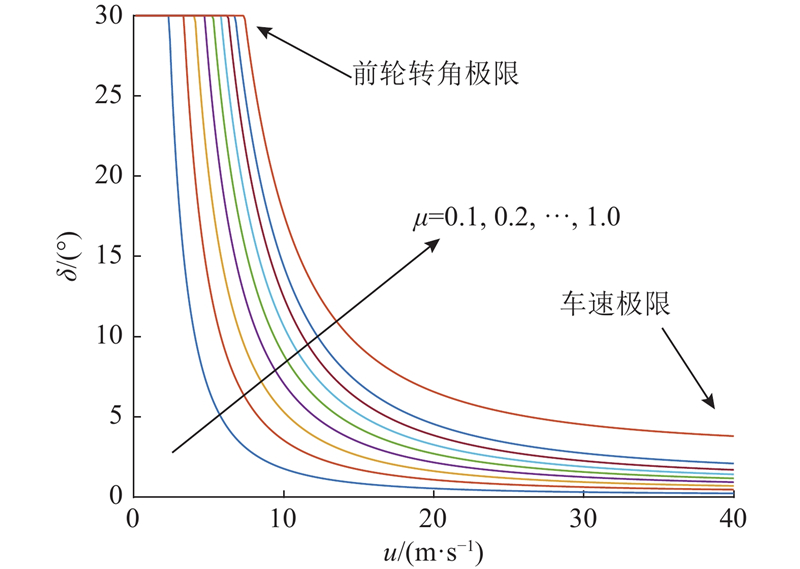
... 本研究提出以车辆最大可达侧向位移描述车辆的转向避撞能力,最大可达侧向位移求解流程如图5 所示. 1)分析轮胎侧偏特性曲线和车辆特性,确定车辆的临界稳定侧向加速度,保证车辆在稳定性边界进行阶跃转向;2)在所得侧向加速度下,根据前馈控制算法求得不同纵向速度对应的前轮转角,建立“侧向加速度−纵向速度−前轮转角”MAP图[17 ] ;3)建立车辆临界稳定的阶跃转向工况,进行仿真实验,得到不同纵向位移、纵向速度下车辆的最大可达侧向位移. ...
... MAP (maps of achievable performance) [17 ] 用于从全局角度描述车辆的稳态操纵行为. 其中“纵向速度−前轮转角”MAP描述了在稳态圆周运动工况,车辆固定侧向加速度下纵向速度和前轮转角的对应关系. MAP涵盖车辆所有输入的优点,通过本研究提出的轮胎模型和转向前馈控制方法,求得在临界稳定侧向加速度的“ $ u-\delta $ 图9 所示的“侧向加速度−纵向速度−前轮转角”MAP,建立车辆所有稳定性边界的阶跃转向工况. ...
1
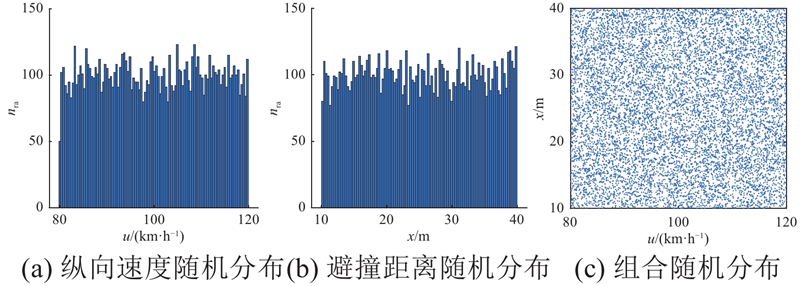
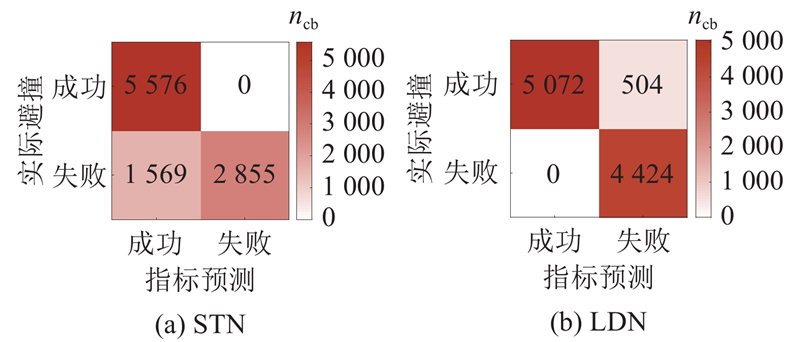
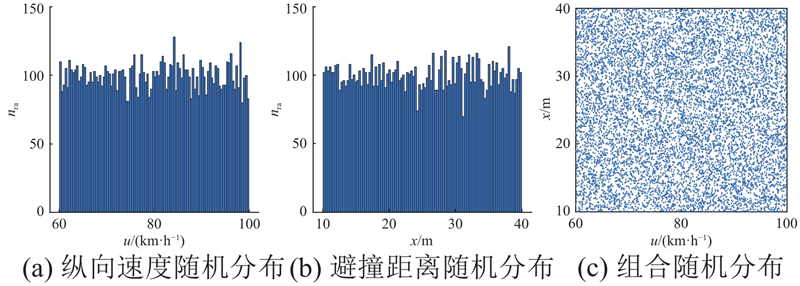
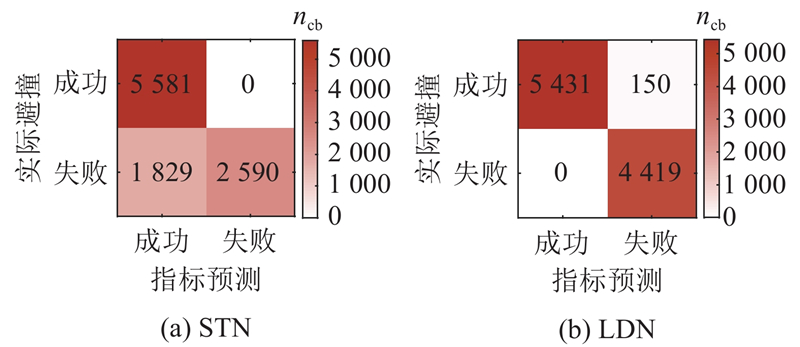
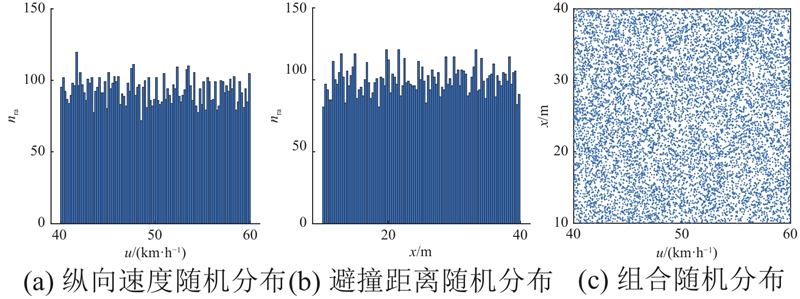
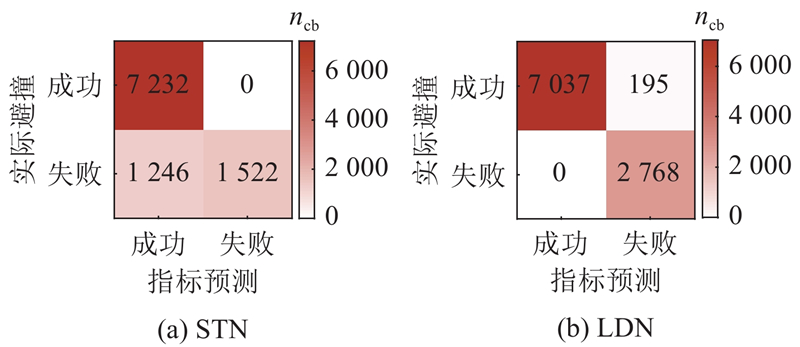
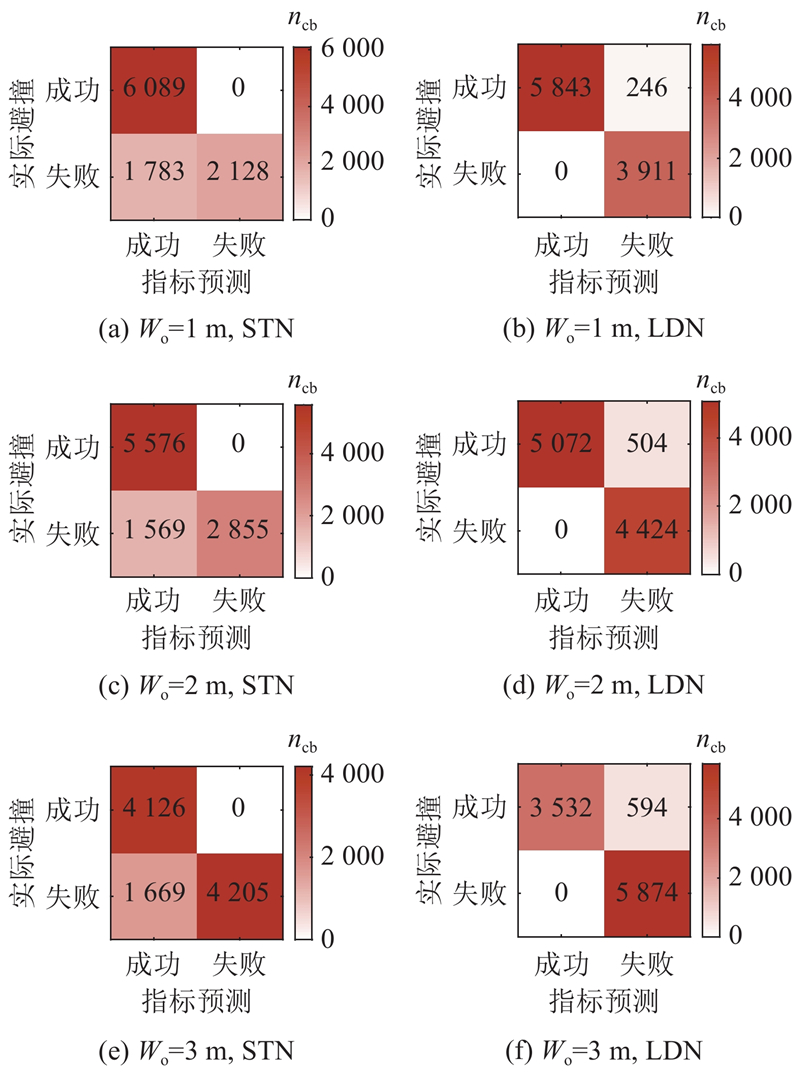
... 蒙特卡洛法通过随机抽样构建概率模型,可以模拟随机现象,适用于解决复杂系统的高维、时间延续性问题[18 ] . Feng等[19 ] 将变道过程中两车相对位移、相对速度和碰撞时间作为参数建立数学模型,通过蒙特卡洛模拟随机生成测试场景,建立无人车辆的变道行为测试库. 受其启发,本研究将路面附着系数、避撞距离、纵向车速作为参数,随机分布生成测试场景,分别用STN、LDN进行判断,通过转向避撞仿真测试进行风险指数的准确性对比, 准确率定义为判断正确的样例数与总样例数的比值. ...
Testing scenario library generation for connected and automated vehicles, part I: methodology
1
2021
... 蒙特卡洛法通过随机抽样构建概率模型,可以模拟随机现象,适用于解决复杂系统的高维、时间延续性问题[18 ] . Feng等[19 ] 将变道过程中两车相对位移、相对速度和碰撞时间作为参数建立数学模型,通过蒙特卡洛模拟随机生成测试场景,建立无人车辆的变道行为测试库. 受其启发,本研究将路面附着系数、避撞距离、纵向车速作为参数,随机分布生成测试场景,分别用STN、LDN进行判断,通过转向避撞仿真测试进行风险指数的准确性对比, 准确率定义为判断正确的样例数与总样例数的比值. ...
Factors contributing to commercial vehicle rear-end conflicts in China: a study using on-board event data recorders
1
2017
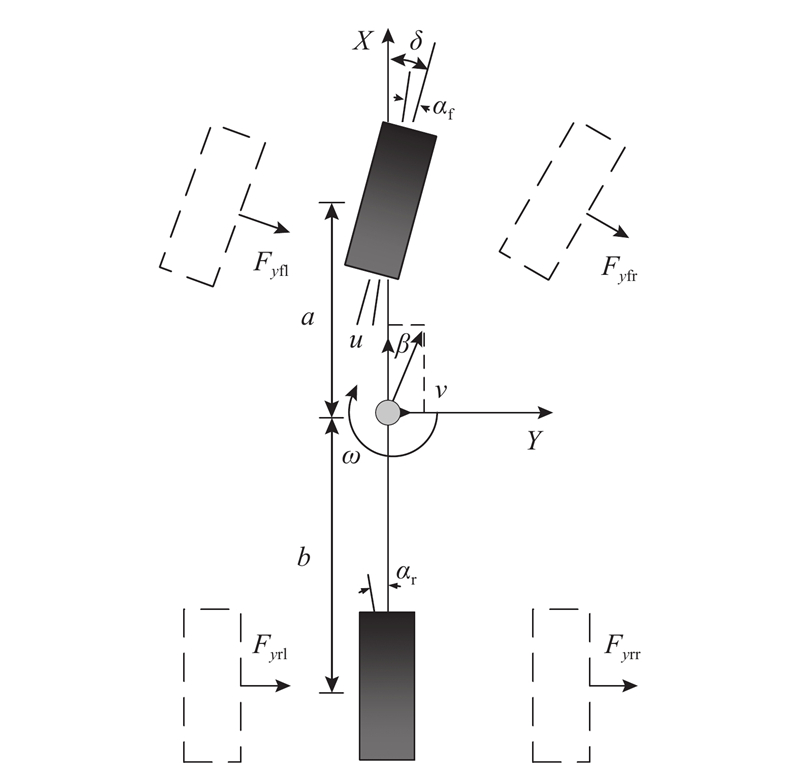
... 汽车先进驾驶辅助系统(advanced driver assistance system, ADAS)在汽车主动安全领域发挥了关键作用,典型如汽车主动避撞系统(collision avoidance system, CAS),根据一定的介入准则,在车辆即将发生碰撞时自动介入,减少驾驶员因慌乱产生的操作失误,大大提升了车辆行驶的安全性[1 -2 ] . 汽车的主动避撞系统一般分为自动紧急制动(autonomous emergency braking, AEB)和自动紧急转向(autonomous emergency steering, AES) 2种方式,在高速工况,转向避撞方式能以更短的避撞距离避开障碍物[3 -4 ] . 为了减小高速工况下车辆转向控制的算力负担,Kapania等[5 ] 提出稳态圆周运动假设下的“前馈-反馈”控制方法,Cui等[6 ] 在该方法基础上设计了反应式的分阶段避撞系统. 来飞等[7 ] 设计了“前馈-反馈”控制跟踪规划的七次项参考路径进行转向避撞. 以上研究在计算前馈控制的前轮转角时,没有考虑车辆转向时的横向载荷转移效应,视同一轴的左右侧垂直载荷相等,由于轮胎侧向力和垂向力存在耦合效应,势必影响前馈期望转角的精度. 这种情况在大侧向加速度轮胎处于强非线性时更严重. ...
1
... 汽车先进驾驶辅助系统(advanced driver assistance system, ADAS)在汽车主动安全领域发挥了关键作用,典型如汽车主动避撞系统(collision avoidance system, CAS),根据一定的介入准则,在车辆即将发生碰撞时自动介入,减少驾驶员因慌乱产生的操作失误,大大提升了车辆行驶的安全性[1 -2 ] . 汽车的主动避撞系统一般分为自动紧急制动(autonomous emergency braking, AEB)和自动紧急转向(autonomous emergency steering, AES) 2种方式,在高速工况,转向避撞方式能以更短的避撞距离避开障碍物[3 -4 ] . 为了减小高速工况下车辆转向控制的算力负担,Kapania等[5 ] 提出稳态圆周运动假设下的“前馈-反馈”控制方法,Cui等[6 ] 在该方法基础上设计了反应式的分阶段避撞系统. 来飞等[7 ] 设计了“前馈-反馈”控制跟踪规划的七次项参考路径进行转向避撞. 以上研究在计算前馈控制的前轮转角时,没有考虑车辆转向时的横向载荷转移效应,视同一轴的左右侧垂直载荷相等,由于轮胎侧向力和垂向力存在耦合效应,势必影响前馈期望转角的精度. 这种情况在大侧向加速度轮胎处于强非线性时更严重. ...
1
... 汽车先进驾驶辅助系统(advanced driver assistance system, ADAS)在汽车主动安全领域发挥了关键作用,典型如汽车主动避撞系统(collision avoidance system, CAS),根据一定的介入准则,在车辆即将发生碰撞时自动介入,减少驾驶员因慌乱产生的操作失误,大大提升了车辆行驶的安全性[1 -2 ] . 汽车的主动避撞系统一般分为自动紧急制动(autonomous emergency braking, AEB)和自动紧急转向(autonomous emergency steering, AES) 2种方式,在高速工况,转向避撞方式能以更短的避撞距离避开障碍物[3 -4 ] . 为了减小高速工况下车辆转向控制的算力负担,Kapania等[5 ] 提出稳态圆周运动假设下的“前馈-反馈”控制方法,Cui等[6 ] 在该方法基础上设计了反应式的分阶段避撞系统. 来飞等[7 ] 设计了“前馈-反馈”控制跟踪规划的七次项参考路径进行转向避撞. 以上研究在计算前馈控制的前轮转角时,没有考虑车辆转向时的横向载荷转移效应,视同一轴的左右侧垂直载荷相等,由于轮胎侧向力和垂向力存在耦合效应,势必影响前馈期望转角的精度. 这种情况在大侧向加速度轮胎处于强非线性时更严重. ...
Autonomous rear-end collision avoidance using an electric power steering system
1
2015
... 汽车先进驾驶辅助系统(advanced driver assistance system, ADAS)在汽车主动安全领域发挥了关键作用,典型如汽车主动避撞系统(collision avoidance system, CAS),根据一定的介入准则,在车辆即将发生碰撞时自动介入,减少驾驶员因慌乱产生的操作失误,大大提升了车辆行驶的安全性[1 -2 ] . 汽车的主动避撞系统一般分为自动紧急制动(autonomous emergency braking, AEB)和自动紧急转向(autonomous emergency steering, AES) 2种方式,在高速工况,转向避撞方式能以更短的避撞距离避开障碍物[3 -4 ] . 为了减小高速工况下车辆转向控制的算力负担,Kapania等[5 ] 提出稳态圆周运动假设下的“前馈-反馈”控制方法,Cui等[6 ] 在该方法基础上设计了反应式的分阶段避撞系统. 来飞等[7 ] 设计了“前馈-反馈”控制跟踪规划的七次项参考路径进行转向避撞. 以上研究在计算前馈控制的前轮转角时,没有考虑车辆转向时的横向载荷转移效应,视同一轴的左右侧垂直载荷相等,由于轮胎侧向力和垂向力存在耦合效应,势必影响前馈期望转角的精度. 这种情况在大侧向加速度轮胎处于强非线性时更严重. ...
1
... 汽车先进驾驶辅助系统(advanced driver assistance system, ADAS)在汽车主动安全领域发挥了关键作用,典型如汽车主动避撞系统(collision avoidance system, CAS),根据一定的介入准则,在车辆即将发生碰撞时自动介入,减少驾驶员因慌乱产生的操作失误,大大提升了车辆行驶的安全性[1 -2 ] . 汽车的主动避撞系统一般分为自动紧急制动(autonomous emergency braking, AEB)和自动紧急转向(autonomous emergency steering, AES) 2种方式,在高速工况,转向避撞方式能以更短的避撞距离避开障碍物[3 -4 ] . 为了减小高速工况下车辆转向控制的算力负担,Kapania等[5 ] 提出稳态圆周运动假设下的“前馈-反馈”控制方法,Cui等[6 ] 在该方法基础上设计了反应式的分阶段避撞系统. 来飞等[7 ] 设计了“前馈-反馈”控制跟踪规划的七次项参考路径进行转向避撞. 以上研究在计算前馈控制的前轮转角时,没有考虑车辆转向时的横向载荷转移效应,视同一轴的左右侧垂直载荷相等,由于轮胎侧向力和垂向力存在耦合效应,势必影响前馈期望转角的精度. 这种情况在大侧向加速度轮胎处于强非线性时更严重. ...
Design of a feedback-feedforward steering controller for accurate path tracking and stability at the limits of handling
3
2015
... 汽车先进驾驶辅助系统(advanced driver assistance system, ADAS)在汽车主动安全领域发挥了关键作用,典型如汽车主动避撞系统(collision avoidance system, CAS),根据一定的介入准则,在车辆即将发生碰撞时自动介入,减少驾驶员因慌乱产生的操作失误,大大提升了车辆行驶的安全性[1 -2 ] . 汽车的主动避撞系统一般分为自动紧急制动(autonomous emergency braking, AEB)和自动紧急转向(autonomous emergency steering, AES) 2种方式,在高速工况,转向避撞方式能以更短的避撞距离避开障碍物[3 -4 ] . 为了减小高速工况下车辆转向控制的算力负担,Kapania等[5 ] 提出稳态圆周运动假设下的“前馈-反馈”控制方法,Cui等[6 ] 在该方法基础上设计了反应式的分阶段避撞系统. 来飞等[7 ] 设计了“前馈-反馈”控制跟踪规划的七次项参考路径进行转向避撞. 以上研究在计算前馈控制的前轮转角时,没有考虑车辆转向时的横向载荷转移效应,视同一轴的左右侧垂直载荷相等,由于轮胎侧向力和垂向力存在耦合效应,势必影响前馈期望转角的精度. 这种情况在大侧向加速度轮胎处于强非线性时更严重. ...
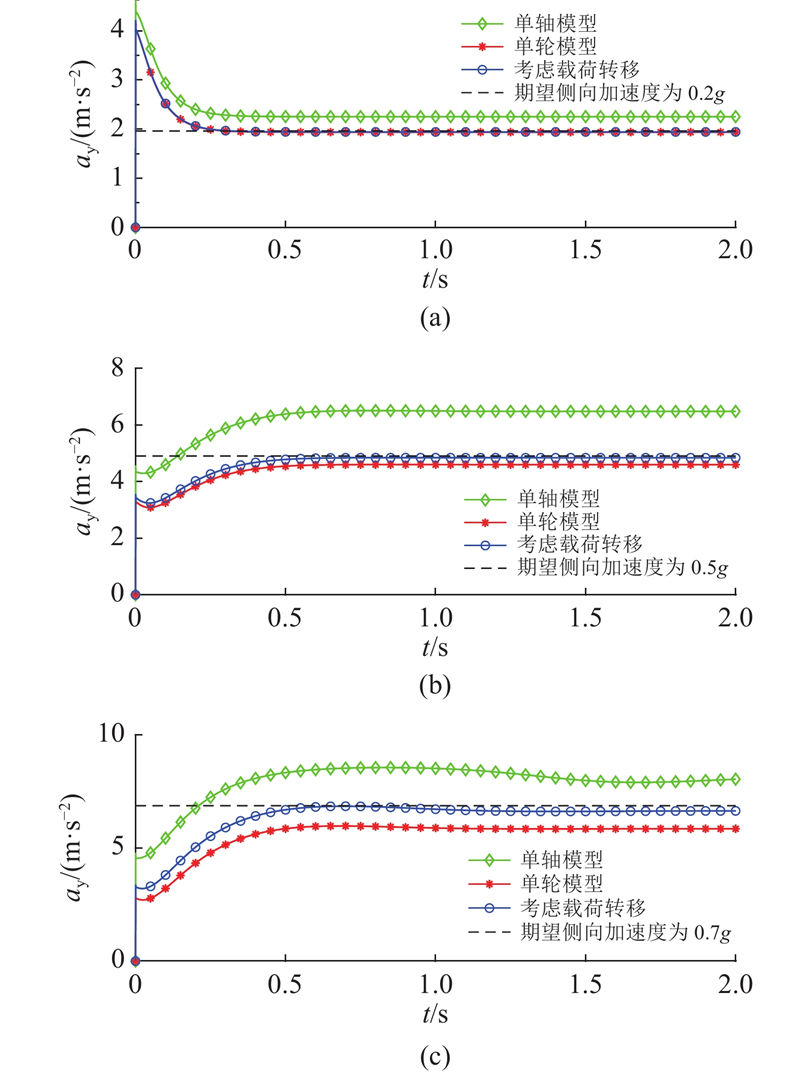
... 在计算前馈控制的前轮转角时研究者通常采用单轴模型或单轮模型[5 -6 ] . 单轴模型将车辆前、后轴的静态垂直载荷代入轮胎逆模型,单轮模型则代入单个轮胎的静态垂直载荷. 当车辆处在较大的侧向加速度工况时,轮胎的非线性特性明显,车辆的横向载荷转移效应会较大程度地影响前馈转角的准确度,对此本研究提出考虑横向载荷转移的转向前馈控制,分别以4个车轮的动态垂直载荷代入轮胎逆模型,提高前馈控制精度. ...
... 对文献[5 ]、[6 ]中4个前馈轮胎侧向力修正如下: ...
A new strategy for rear-end collision avoidance via autonomous steering and differential braking in highway driving
6
2020
... 汽车先进驾驶辅助系统(advanced driver assistance system, ADAS)在汽车主动安全领域发挥了关键作用,典型如汽车主动避撞系统(collision avoidance system, CAS),根据一定的介入准则,在车辆即将发生碰撞时自动介入,减少驾驶员因慌乱产生的操作失误,大大提升了车辆行驶的安全性[1 -2 ] . 汽车的主动避撞系统一般分为自动紧急制动(autonomous emergency braking, AEB)和自动紧急转向(autonomous emergency steering, AES) 2种方式,在高速工况,转向避撞方式能以更短的避撞距离避开障碍物[3 -4 ] . 为了减小高速工况下车辆转向控制的算力负担,Kapania等[5 ] 提出稳态圆周运动假设下的“前馈-反馈”控制方法,Cui等[6 ] 在该方法基础上设计了反应式的分阶段避撞系统. 来飞等[7 ] 设计了“前馈-反馈”控制跟踪规划的七次项参考路径进行转向避撞. 以上研究在计算前馈控制的前轮转角时,没有考虑车辆转向时的横向载荷转移效应,视同一轴的左右侧垂直载荷相等,由于轮胎侧向力和垂向力存在耦合效应,势必影响前馈期望转角的精度. 这种情况在大侧向加速度轮胎处于强非线性时更严重. ...
... 在转向避撞的过程中,常采用基于规则的决策方法,由评价指标确定不同场景的介入准则. 其中转向风险指数(steer threat number, STN)通过车辆避撞所需侧向加速度和最大侧向加速度的比值来描述车辆在路面附着约束下的转向避撞能力,能够较好地反映车辆的侧向加速能力,获得了广泛应用[8 ] . Nilsson等[9 ] 通过STN确定了车辆的临界避撞效果,明确了主动避撞系统的工作范围. Hosseini等[10 ] 在原有STN的基础上增加车速自适应的预测环节,在不增加预警系统误报率的同时实现了提前预警. Cui等[6 ] 通过碰撞时间(time to collision, TTC)、制动风险指数(brake threat number, BTN)、STN的分层逻辑判断,确定了单车道高速场景下制动和转向避撞的不同介入时机. 在此基础上,Cui等[11 ] 通过有限状态机的方式划分邻车道有车场景下的车辆行驶区域,并提出“车-路”耦合威胁评估模型,建立避撞系统在各状态的介入准则和各避撞方式的切换条件. 以上对于评价指标的研究进行了车辆点质量模型假设,且通常根据路面附着约束以稳态侧向加速度进行车辆转向避撞能力的评估,忽略了车辆特性对车辆转向能力的影响以及高速转向过程车辆的强非线性和瞬态特性. 具体表现为1)车辆在高速大转向的极限工况表现出强烈的非线性,此时车辆具有较大的加速度且轮胎力接近饱和[12 ] ,Pacejka等[13 -14 ] 分析了转向过程中轮胎侧偏角变化趋势,认为对于具有不足转向特性的车辆,在纯侧偏稳态转向时,前轮侧偏角大于后轮,因此前轮会先于后轮达到饱和,最终车辆的稳定侧向加速度应由前轮决定,对于具有过多转向特性的车辆则相反[13 -14 ] . 因此车辆通常难以达到路面附着系数限制的最大稳态加速度. 2)在极限工况,车辆表现出高度的瞬态特性[15 ] ,车辆稳态加速度行驶的时间在整个避撞过程中的时间占比较少. 本研究提出将侧向位移指数(lateral displacement number, LDN)作为适用于车辆极限工况的转向风险指数,LDN的定义为车辆避撞所需侧向位移与最大可达侧向位移的比值,通过阶跃转向实验模拟转向避撞获得最大可达侧向位移,从而反映高速转向过程的非线性并包含转向的瞬态过程. 以侧向位移作为避撞条件可以更直接、准确地反映车辆的避撞条件和在极限工况的转向避撞能力. ...
... 在计算前馈控制的前轮转角时研究者通常采用单轴模型或单轮模型[5 -6 ] . 单轴模型将车辆前、后轴的静态垂直载荷代入轮胎逆模型,单轮模型则代入单个轮胎的静态垂直载荷. 当车辆处在较大的侧向加速度工况时,轮胎的非线性特性明显,车辆的横向载荷转移效应会较大程度地影响前馈转角的准确度,对此本研究提出考虑横向载荷转移的转向前馈控制,分别以4个车轮的动态垂直载荷代入轮胎逆模型,提高前馈控制精度. ...
... 对文献[5 ]、[6 ]中4个前馈轮胎侧向力修正如下: ...
... 在如图3 所示的转向避撞场景中,定义STN为避撞所需侧向加速度和最大侧向加速度的比值[6 ,10 ] : ...
... 取 $ {W}_{\mathrm{h}}={W}_{\mathrm{o}}=2\;\mathrm{m} $ $ d=0.2\; \mathrm{m} $ $ {y}_{\mathrm{r}\mathrm{e}\mathrm{q}}=2.2\;\mathrm{m} $ $ {P}_{{x}} $ $ u $ 6 ]),将避撞过程分为2个阶段,阶段1)采用恒定侧向加速度的“前馈-反馈”控制做稳态圆周运动,离开碰撞危险域后,阶段2)采用MPC控制车身回正并跟踪邻车道中心线. 取高、中、低3种路面附着系数,分别为 $ \;\mu =1.0 $ $ 0.4 $ . 在Simulink-Carsim联合仿真环境下进行相应测试验证. ...
1
... 汽车先进驾驶辅助系统(advanced driver assistance system, ADAS)在汽车主动安全领域发挥了关键作用,典型如汽车主动避撞系统(collision avoidance system, CAS),根据一定的介入准则,在车辆即将发生碰撞时自动介入,减少驾驶员因慌乱产生的操作失误,大大提升了车辆行驶的安全性[1 -2 ] . 汽车的主动避撞系统一般分为自动紧急制动(autonomous emergency braking, AEB)和自动紧急转向(autonomous emergency steering, AES) 2种方式,在高速工况,转向避撞方式能以更短的避撞距离避开障碍物[3 -4 ] . 为了减小高速工况下车辆转向控制的算力负担,Kapania等[5 ] 提出稳态圆周运动假设下的“前馈-反馈”控制方法,Cui等[6 ] 在该方法基础上设计了反应式的分阶段避撞系统. 来飞等[7 ] 设计了“前馈-反馈”控制跟踪规划的七次项参考路径进行转向避撞. 以上研究在计算前馈控制的前轮转角时,没有考虑车辆转向时的横向载荷转移效应,视同一轴的左右侧垂直载荷相等,由于轮胎侧向力和垂向力存在耦合效应,势必影响前馈期望转角的精度. 这种情况在大侧向加速度轮胎处于强非线性时更严重. ...
1
... 汽车先进驾驶辅助系统(advanced driver assistance system, ADAS)在汽车主动安全领域发挥了关键作用,典型如汽车主动避撞系统(collision avoidance system, CAS),根据一定的介入准则,在车辆即将发生碰撞时自动介入,减少驾驶员因慌乱产生的操作失误,大大提升了车辆行驶的安全性[1 -2 ] . 汽车的主动避撞系统一般分为自动紧急制动(autonomous emergency braking, AEB)和自动紧急转向(autonomous emergency steering, AES) 2种方式,在高速工况,转向避撞方式能以更短的避撞距离避开障碍物[3 -4 ] . 为了减小高速工况下车辆转向控制的算力负担,Kapania等[5 ] 提出稳态圆周运动假设下的“前馈-反馈”控制方法,Cui等[6 ] 在该方法基础上设计了反应式的分阶段避撞系统. 来飞等[7 ] 设计了“前馈-反馈”控制跟踪规划的七次项参考路径进行转向避撞. 以上研究在计算前馈控制的前轮转角时,没有考虑车辆转向时的横向载荷转移效应,视同一轴的左右侧垂直载荷相等,由于轮胎侧向力和垂向力存在耦合效应,势必影响前馈期望转角的精度. 这种情况在大侧向加速度轮胎处于强非线性时更严重. ...
1
... 在转向避撞的过程中,常采用基于规则的决策方法,由评价指标确定不同场景的介入准则. 其中转向风险指数(steer threat number, STN)通过车辆避撞所需侧向加速度和最大侧向加速度的比值来描述车辆在路面附着约束下的转向避撞能力,能够较好地反映车辆的侧向加速能力,获得了广泛应用[8 ] . Nilsson等[9 ] 通过STN确定了车辆的临界避撞效果,明确了主动避撞系统的工作范围. Hosseini等[10 ] 在原有STN的基础上增加车速自适应的预测环节,在不增加预警系统误报率的同时实现了提前预警. Cui等[6 ] 通过碰撞时间(time to collision, TTC)、制动风险指数(brake threat number, BTN)、STN的分层逻辑判断,确定了单车道高速场景下制动和转向避撞的不同介入时机. 在此基础上,Cui等[11 ] 通过有限状态机的方式划分邻车道有车场景下的车辆行驶区域,并提出“车-路”耦合威胁评估模型,建立避撞系统在各状态的介入准则和各避撞方式的切换条件. 以上对于评价指标的研究进行了车辆点质量模型假设,且通常根据路面附着约束以稳态侧向加速度进行车辆转向避撞能力的评估,忽略了车辆特性对车辆转向能力的影响以及高速转向过程车辆的强非线性和瞬态特性. 具体表现为1)车辆在高速大转向的极限工况表现出强烈的非线性,此时车辆具有较大的加速度且轮胎力接近饱和[12 ] ,Pacejka等[13 -14 ] 分析了转向过程中轮胎侧偏角变化趋势,认为对于具有不足转向特性的车辆,在纯侧偏稳态转向时,前轮侧偏角大于后轮,因此前轮会先于后轮达到饱和,最终车辆的稳定侧向加速度应由前轮决定,对于具有过多转向特性的车辆则相反[13 -14 ] . 因此车辆通常难以达到路面附着系数限制的最大稳态加速度. 2)在极限工况,车辆表现出高度的瞬态特性[15 ] ,车辆稳态加速度行驶的时间在整个避撞过程中的时间占比较少. 本研究提出将侧向位移指数(lateral displacement number, LDN)作为适用于车辆极限工况的转向风险指数,LDN的定义为车辆避撞所需侧向位移与最大可达侧向位移的比值,通过阶跃转向实验模拟转向避撞获得最大可达侧向位移,从而反映高速转向过程的非线性并包含转向的瞬态过程. 以侧向位移作为避撞条件可以更直接、准确地反映车辆的避撞条件和在极限工况的转向避撞能力. ...
Worst-case analysis of automotive collision avoidance systems
1
2015
... 在转向避撞的过程中,常采用基于规则的决策方法,由评价指标确定不同场景的介入准则. 其中转向风险指数(steer threat number, STN)通过车辆避撞所需侧向加速度和最大侧向加速度的比值来描述车辆在路面附着约束下的转向避撞能力,能够较好地反映车辆的侧向加速能力,获得了广泛应用[8 ] . Nilsson等[9 ] 通过STN确定了车辆的临界避撞效果,明确了主动避撞系统的工作范围. Hosseini等[10 ] 在原有STN的基础上增加车速自适应的预测环节,在不增加预警系统误报率的同时实现了提前预警. Cui等[6 ] 通过碰撞时间(time to collision, TTC)、制动风险指数(brake threat number, BTN)、STN的分层逻辑判断,确定了单车道高速场景下制动和转向避撞的不同介入时机. 在此基础上,Cui等[11 ] 通过有限状态机的方式划分邻车道有车场景下的车辆行驶区域,并提出“车-路”耦合威胁评估模型,建立避撞系统在各状态的介入准则和各避撞方式的切换条件. 以上对于评价指标的研究进行了车辆点质量模型假设,且通常根据路面附着约束以稳态侧向加速度进行车辆转向避撞能力的评估,忽略了车辆特性对车辆转向能力的影响以及高速转向过程车辆的强非线性和瞬态特性. 具体表现为1)车辆在高速大转向的极限工况表现出强烈的非线性,此时车辆具有较大的加速度且轮胎力接近饱和[12 ] ,Pacejka等[13 -14 ] 分析了转向过程中轮胎侧偏角变化趋势,认为对于具有不足转向特性的车辆,在纯侧偏稳态转向时,前轮侧偏角大于后轮,因此前轮会先于后轮达到饱和,最终车辆的稳定侧向加速度应由前轮决定,对于具有过多转向特性的车辆则相反[13 -14 ] . 因此车辆通常难以达到路面附着系数限制的最大稳态加速度. 2)在极限工况,车辆表现出高度的瞬态特性[15 ] ,车辆稳态加速度行驶的时间在整个避撞过程中的时间占比较少. 本研究提出将侧向位移指数(lateral displacement number, LDN)作为适用于车辆极限工况的转向风险指数,LDN的定义为车辆避撞所需侧向位移与最大可达侧向位移的比值,通过阶跃转向实验模拟转向避撞获得最大可达侧向位移,从而反映高速转向过程的非线性并包含转向的瞬态过程. 以侧向位移作为避撞条件可以更直接、准确地反映车辆的避撞条件和在极限工况的转向避撞能力. ...
2
... 在转向避撞的过程中,常采用基于规则的决策方法,由评价指标确定不同场景的介入准则. 其中转向风险指数(steer threat number, STN)通过车辆避撞所需侧向加速度和最大侧向加速度的比值来描述车辆在路面附着约束下的转向避撞能力,能够较好地反映车辆的侧向加速能力,获得了广泛应用[8 ] . Nilsson等[9 ] 通过STN确定了车辆的临界避撞效果,明确了主动避撞系统的工作范围. Hosseini等[10 ] 在原有STN的基础上增加车速自适应的预测环节,在不增加预警系统误报率的同时实现了提前预警. Cui等[6 ] 通过碰撞时间(time to collision, TTC)、制动风险指数(brake threat number, BTN)、STN的分层逻辑判断,确定了单车道高速场景下制动和转向避撞的不同介入时机. 在此基础上,Cui等[11 ] 通过有限状态机的方式划分邻车道有车场景下的车辆行驶区域,并提出“车-路”耦合威胁评估模型,建立避撞系统在各状态的介入准则和各避撞方式的切换条件. 以上对于评价指标的研究进行了车辆点质量模型假设,且通常根据路面附着约束以稳态侧向加速度进行车辆转向避撞能力的评估,忽略了车辆特性对车辆转向能力的影响以及高速转向过程车辆的强非线性和瞬态特性. 具体表现为1)车辆在高速大转向的极限工况表现出强烈的非线性,此时车辆具有较大的加速度且轮胎力接近饱和[12 ] ,Pacejka等[13 -14 ] 分析了转向过程中轮胎侧偏角变化趋势,认为对于具有不足转向特性的车辆,在纯侧偏稳态转向时,前轮侧偏角大于后轮,因此前轮会先于后轮达到饱和,最终车辆的稳定侧向加速度应由前轮决定,对于具有过多转向特性的车辆则相反[13 -14 ] . 因此车辆通常难以达到路面附着系数限制的最大稳态加速度. 2)在极限工况,车辆表现出高度的瞬态特性[15 ] ,车辆稳态加速度行驶的时间在整个避撞过程中的时间占比较少. 本研究提出将侧向位移指数(lateral displacement number, LDN)作为适用于车辆极限工况的转向风险指数,LDN的定义为车辆避撞所需侧向位移与最大可达侧向位移的比值,通过阶跃转向实验模拟转向避撞获得最大可达侧向位移,从而反映高速转向过程的非线性并包含转向的瞬态过程. 以侧向位移作为避撞条件可以更直接、准确地反映车辆的避撞条件和在极限工况的转向避撞能力. ...
... 在如图3 所示的转向避撞场景中,定义STN为避撞所需侧向加速度和最大侧向加速度的比值[6 ,10 ] : ...
A hierarchical framework of emergency collision avoidance amid surrounding vehicles in highway driving
1
2021
... 在转向避撞的过程中,常采用基于规则的决策方法,由评价指标确定不同场景的介入准则. 其中转向风险指数(steer threat number, STN)通过车辆避撞所需侧向加速度和最大侧向加速度的比值来描述车辆在路面附着约束下的转向避撞能力,能够较好地反映车辆的侧向加速能力,获得了广泛应用[8 ] . Nilsson等[9 ] 通过STN确定了车辆的临界避撞效果,明确了主动避撞系统的工作范围. Hosseini等[10 ] 在原有STN的基础上增加车速自适应的预测环节,在不增加预警系统误报率的同时实现了提前预警. Cui等[6 ] 通过碰撞时间(time to collision, TTC)、制动风险指数(brake threat number, BTN)、STN的分层逻辑判断,确定了单车道高速场景下制动和转向避撞的不同介入时机. 在此基础上,Cui等[11 ] 通过有限状态机的方式划分邻车道有车场景下的车辆行驶区域,并提出“车-路”耦合威胁评估模型,建立避撞系统在各状态的介入准则和各避撞方式的切换条件. 以上对于评价指标的研究进行了车辆点质量模型假设,且通常根据路面附着约束以稳态侧向加速度进行车辆转向避撞能力的评估,忽略了车辆特性对车辆转向能力的影响以及高速转向过程车辆的强非线性和瞬态特性. 具体表现为1)车辆在高速大转向的极限工况表现出强烈的非线性,此时车辆具有较大的加速度且轮胎力接近饱和[12 ] ,Pacejka等[13 -14 ] 分析了转向过程中轮胎侧偏角变化趋势,认为对于具有不足转向特性的车辆,在纯侧偏稳态转向时,前轮侧偏角大于后轮,因此前轮会先于后轮达到饱和,最终车辆的稳定侧向加速度应由前轮决定,对于具有过多转向特性的车辆则相反[13 -14 ] . 因此车辆通常难以达到路面附着系数限制的最大稳态加速度. 2)在极限工况,车辆表现出高度的瞬态特性[15 ] ,车辆稳态加速度行驶的时间在整个避撞过程中的时间占比较少. 本研究提出将侧向位移指数(lateral displacement number, LDN)作为适用于车辆极限工况的转向风险指数,LDN的定义为车辆避撞所需侧向位移与最大可达侧向位移的比值,通过阶跃转向实验模拟转向避撞获得最大可达侧向位移,从而反映高速转向过程的非线性并包含转向的瞬态过程. 以侧向位移作为避撞条件可以更直接、准确地反映车辆的避撞条件和在极限工况的转向避撞能力. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}