极限工况下的车辆转向避撞风险指数
Threat number design for steering collision avoidance at extreme conditions
极限工况下的车辆转向避撞风险指数 |
| 黄子文,李莉,周兵,吴晓建,柴天,许艳 |
|
Threat number design for steering collision avoidance at extreme conditions |
| Zi-wen HUANG,Li LI,Bing ZHOU,Xiao-jian WU,Tian CHAI,Yan XU |
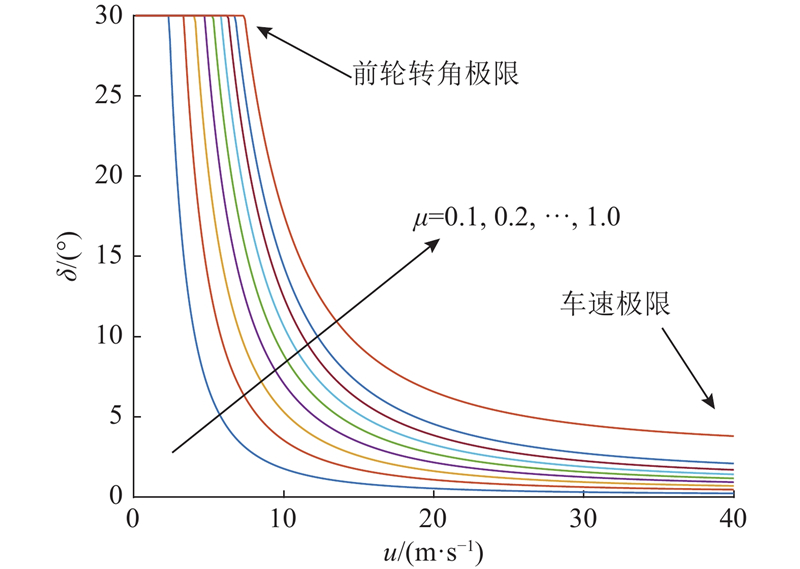
| 图 9 “侧向加速度−纵向速度−前轮转角”MAP |
| Fig.9 MAP of “lateral acceleration-longitudinal velocity-front wheel angle” |
|
|