

微机电系统(MEMS)和微光机电系统(MOMES)技术的快速发展使其在航空航天、医疗、农业等领域具有很大的应用前景. 在MEMS和MOMES中,微驱动器作为其中的可动部分,动作的响应速度、控制精度指标决定了该系统的优良性. 微驱动技术包括静电驱动、压电驱动、电磁驱动和热驱动等. 静电驱动以响应速度快、高可靠性和使用寿命长等优点,在MEMS和MOMES中有着广泛的应用. 静电驱动需要电源附加装置,不可避免会产生噪声干扰,导致系统的稳定性下降,甚至导致系统无法工作. 近年来,智能材料的发展在很大程度上推动了新型驱动器的研究和发展. PLZT陶瓷片作为新型智能材料,当它受到波长约为365 nm的高能紫外光照射时,在极化方向上会产生光生电压和光致形变. 近年来,众多学者基于PLZT陶瓷的反常光生伏特效应和光致形变效应对PLZT陶瓷在主动振动控制和微驱动方面的应用展开了大量的研究. 在主动振动控制方面,Shih等[1]利用光致伸缩致动器,实现对扁球壳的主动振动控制. Sun等[2]将PLZT薄膜层合于柔性梁上,利用PLZT的光致伸缩效应对柔性梁进行无线振动控制. Rahman等[3]提出并分析有限元模型,研究光致伸缩驱动器用于微器件激励的可行性. Wang等[4]研究光致伸缩致动器层合于薄型圆柱壳的无线主动振动控制. 姜晶等[5]基于0-3方向极化的PLZT光致伸缩效应,对开口圆柱壳进行主动振动控制. He等[6]提出PLZT多片式致动器,可以有效地抑制圆柱薄壳的多模态振动. 在微驱动方面,黄家瀚等[7]提出基于PLZT双晶片的光驱动微夹钳,该微夹钳可以实现远程光控且不受电磁干扰. Lu等[8]利用PLZT陶瓷的光致伸缩效应,提出光驱动伺服系统. 由于PLZT陶瓷光致形变的迟滞现象[9],在很大程度上限制了PLZT陶瓷在微驱动方面的应用. 为了解决PLZT光致形变的滞后性,姜晶等[10-11]提出基于PLZT/PVDF的混合驱动方法,该方法可以有效地消除PLZT光致形变的滞后性. Liu等[12-13]提出新型的光电-静电混合驱动机制,研究驱动特性,但Liu等[12-13]主要研究水平下电极光电-静电驱动器的开环位移输出性能,未展开光电-静电复合驱动器输出位移的闭环控制研究.
本文为了提高光电-静电复合驱动器的响应速度,基于双晶片PLZT陶瓷提出具有倾斜下电极的光电-静电复合驱动器. 本文在构建光电-静电复合驱动器的数学模型的基础上,推导该光电-静电复合驱动器的闭环控制方程,通过闭环控制仿真研究具有不同倾斜角的驱动器的驱动性能.
1. 光电-静电复合驱动器数学模型构建
1.1. 光电-静电复合驱动器
光电-静电复合驱动器由PLZT双晶片光电换能器、静电驱动结构组成,如图1所示. PLZT双晶片光电换能器由2个PLZT陶瓷片连接而成,PLZT_1陶瓷片和PLZT_2陶瓷片的极化方向相反,在PLZT双晶片的上、下表面镀有一对公共电极,通过导线与静电驱动结构相连. 当高能紫外光UV_1单独照射PLZT_1陶瓷片时,由于光电反常光生伏特效应,在公共电极间所产生的光生电压的方向与PLZT_1陶瓷片的极化方向相同. 当UV_2单独照射PLZT_2陶瓷片时,在公共电极间所产生的光生电压的方向与PLZT_2陶瓷片的极化方向相同. 通过控制UV_1和UV_2的开关状态,可以在公共电极上得到所预期的光生电压,为静电驱动结构提供驱动电压. 如表1所示为光电-静电复合驱动器的结构参数.
图 1
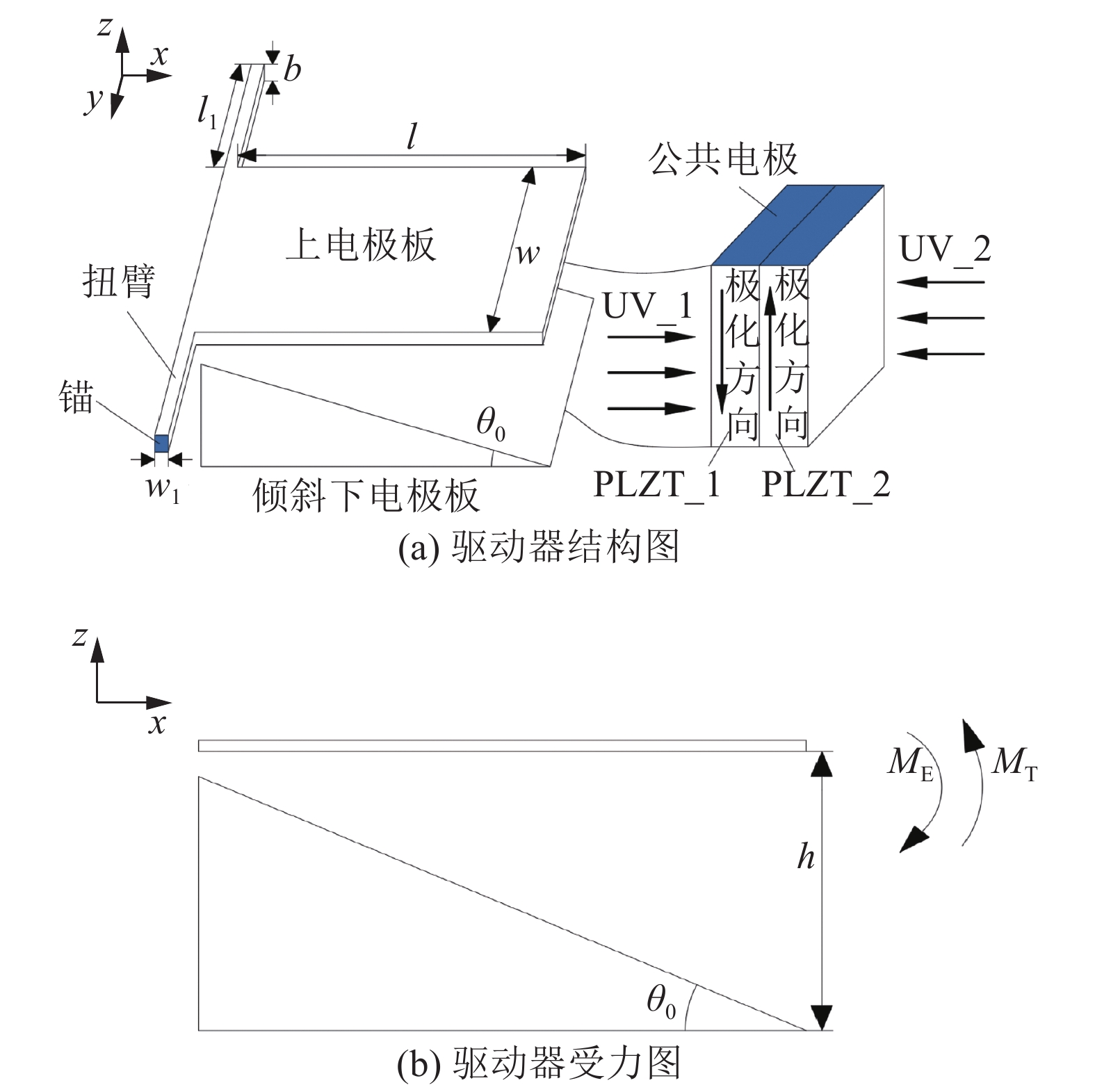
图 1 具有倾斜下电极的光电-静电复合驱动器结构及受力示意图
Fig.1 Schematic diagram of photovoltaic electrostatic hybrid actuator with slant lower electrode
表 1 光电-静电复合驱动器结构参数
Tab.1
| 参数 | 数值 |
| 扭臂宽度 w1/μm | 10 |
| 扭臂厚度b/μm | 10 |
| 上电极长度l/μm | 1600 |
| 上电极宽度w/μm | 900 |
| 上下电极最大间距h/μm | 50 |
| 扭臂长度l1/μm | 800 |
| 下电极倾斜角θ0/(°) | 1.7 |
1.2. PLZT 陶瓷片的光生电压数学模型
高能紫外光照射下的PLZT陶瓷片的光电效应是复杂多物理场耦合作用的结果,如图2所示. 当PLZT陶瓷片受到光照时,由于反常光生伏特效应,在陶瓷片极化方向上会产生电压. 由于光热效应导致PLZT陶瓷片温度升高,温度的骤变会导致热释电效应,产生热释电电压. 温度变化引起PLZT陶瓷形变,又由于PLZT陶瓷的压电效应产生压电电压. 由反常光生伏特效应和热释电效应产生的电压与PLZT陶瓷片极化方向相同,由压电效应产生的电压与极化方向相反.
图 2
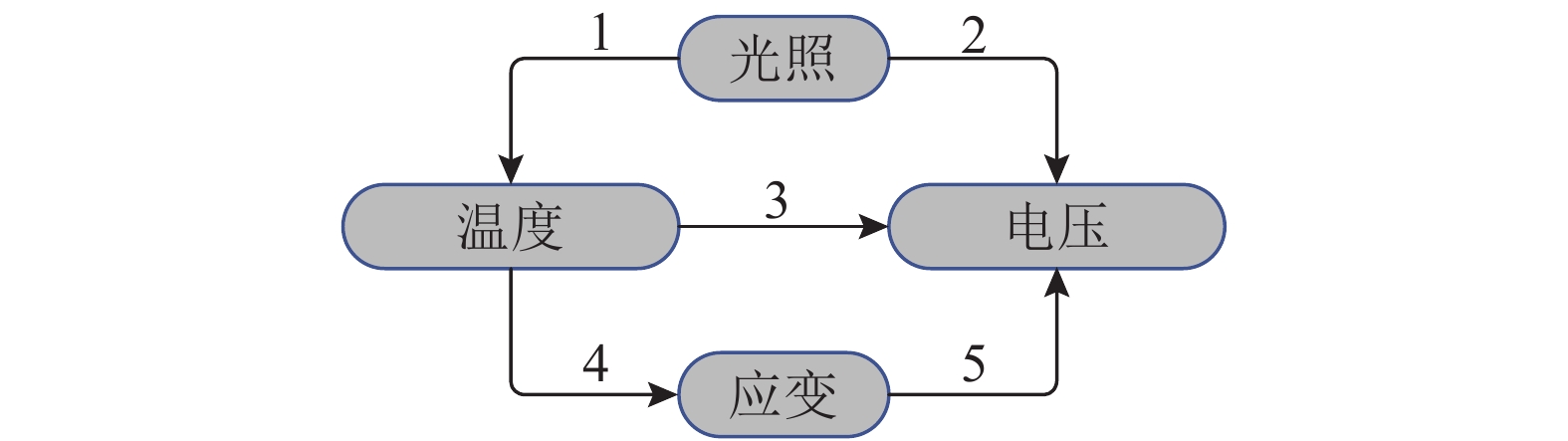
图 2 PLZT陶瓷的光-电-热-力多物理场耦合关系
1-光焦热效应;2-光生伏特效应;3-热释电效应;4-热膨胀效应;5-压电效应 Coupling relationship of opto-electric-thermo-mechanic fields of PLZT ceramic
基于对PLZT陶瓷片多物理耦合场的机理分析,得出PLZT陶瓷片在光照阶段下的光生电压表达式[14]为
式中:VS为饱和电压,τ为光照阶段的时间常数,t 为仿真时间.
当在t0 时刻对PLZT陶瓷片停止光照时,PLZT陶瓷片的电压为 V(t0). 停止光照后,PLZT陶瓷片的光生电压表达式[15]为
式中:A为PLZT陶瓷的电极面积;P为PLZT陶瓷的热释电系数;Cp为电容[16];t1为光照时长,本文设置为20 s;λ为PLZT陶瓷的热应力系数;De为PLZT陶瓷的2个电极的距离;d3i为PLZT陶瓷的压电常数;i为PLZT陶瓷坐标系中的光应变方向,i=1, 2, 3;Ea为PLZT陶瓷的弹性模量;△ Ts-d为光停阶段的最大温度下降量;β2为热变形与电场强度的转化系数;τd1、τd2 分别为光停阶段热释电效应和热膨胀效应的时间常数.
为了对光停阶段的PLZT陶瓷片的光生电压表达式进行参数识别,式(2)可以简化为
式中:
V0= V(t0)−(AP/Cp−β2λDe/(d3iEa))△Ts-d,
A1=(AP/Cp)△Ts-d,
A2= −[β2λDe/(d3iEa)]△Ts-d.
1.3. 光电-静电复合驱动器力学模型
如图1所示,当PLZT陶瓷产生的光生电压通过导线加载到上、下极板时,由于库仑力的作用,上、下极板之间会产生静电力矩,驱动上极板向下偏转. 静电力矩的表达式为
式中:ε0 为真空介电常数,为8.85×10−12 F/m;θ0 为下极板的倾斜角;θ 为上电极的偏转角.
在静电力矩的作用下,上极板向下偏转,扭臂上会产生与静电力矩平衡的恢复力矩,表达式为
式中:G 为电极材料的切变模量,本文中材料为硅,G = 5.2×1010 Pa;K为扭臂的扭转常数.
当不考虑重力和空气阻尼的影响时,对扭臂受力进行静态分析. 当扭臂偏转某一角度时,受到的恢复力矩为一确定值,通过式(4)可以得出对应的驱动电压. 由式(4)、(5)可得,驱动电压和上电极偏转角度的关系如下:
上电极偏转角与上电极偏转位移的关系为
将式(1)代入式(6),可得上电极偏转角与光照时间的关系表达式:
2. 光电-静电复合驱动器闭环位移控制模型
基于PLZT陶瓷的光电-静电复合驱动器输出位移闭环控制模型如图3所示. 通过电脑输入目标位移和仿真总时间,由光源控制器控制PLZT双晶片上的光照,进而控制上、下电极的驱动电压. 当驱动器的输出位移小于目标位移时,UV_1开启,驱动电压上升,驱动器输出位移增大. 当输出位移增加至大于目标位移时,UV_1关闭同时打开UV_2,则驱动电压快速下降直至输出位移小于目标位移. 如此往复,即可实现驱动器输出位移的闭环控制.
图 3
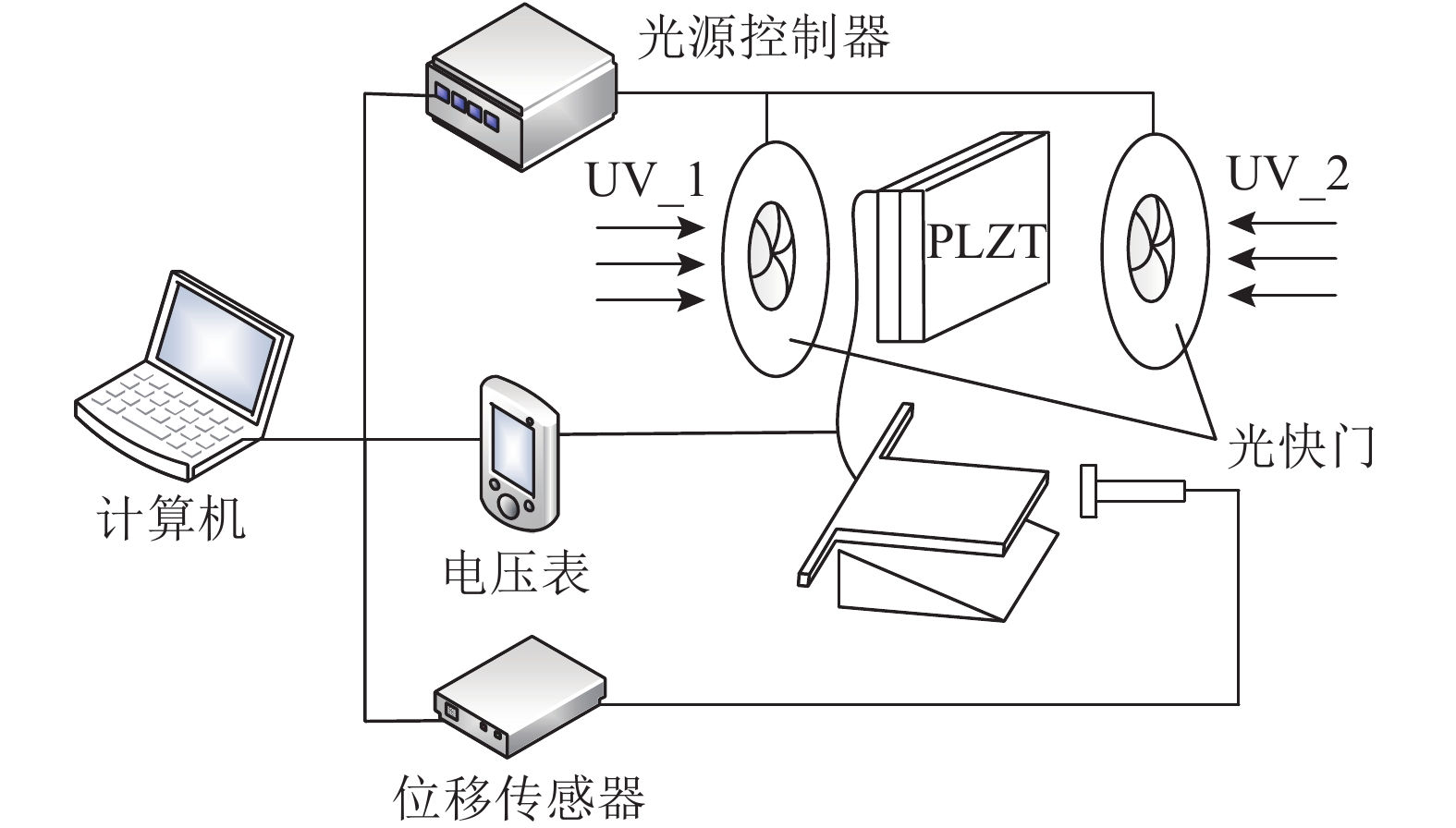
图 3 光电-静电复合驱动器闭环控制模型
Fig.3 Closed-loop control model of photovoltaic electrostatic hybrid actuator
2.1. 光电-静电复合驱动器闭环位移控制模型的参数识别
为了识别光照阶段和光停阶段PLZT陶瓷片光生电压表达式的参数,对PLZT陶瓷片的光生电压进行静态实验. 在实验中,将光照时间设置为20 s,光停时间为80 s,分别用辐射照度为20、40、60 mW/cm2的高能紫外光对PLZT陶瓷片进行照射,光停之后继续对PLZT陶瓷片的光生电压进行测量. 如图4所示为不同辐射照度下的光生电压实验曲线.
图 4
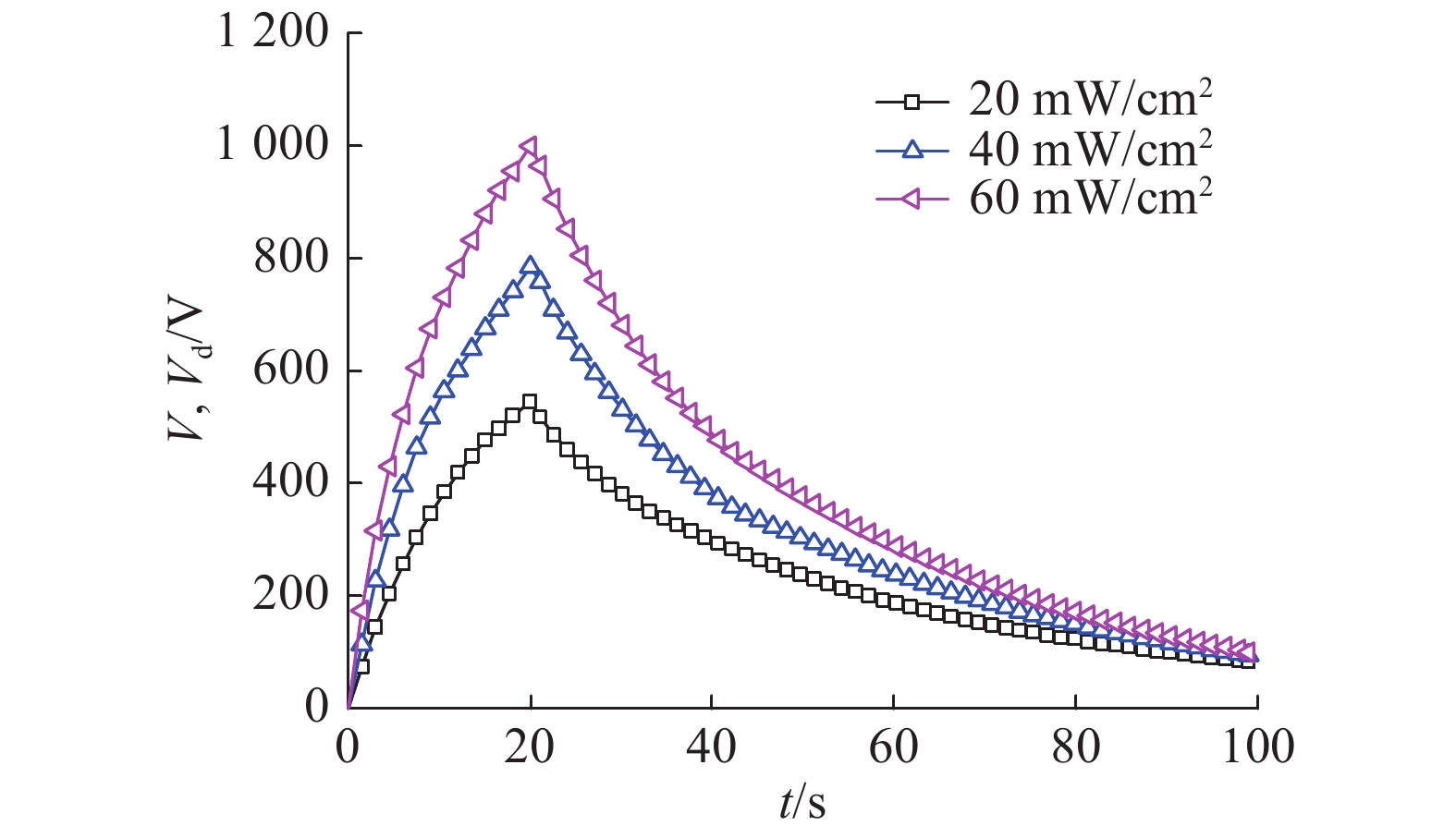
图 4 不同辐射照度PLZT陶瓷光生电压随时间的变化曲线
Fig.4 Time history of photovoltage of PLZT under irradiation of different light intensities
基于光生电压的实验数据和式(1)、(3),可得不同辐射照度下VS、V0、τ、τd1、τd2、A1、A2 的拟合值. 辐射照度为20 mW/cm2的光生电压表达式为
辐射照度为40 mW/cm2的光生电压表达式为
辐射照度为60 mW/cm2的光生电压表达式为
如图5所示为不同辐射照度下PLZT陶瓷片光生电压的实验和拟合曲线.
图 5

图 5 不同辐射照度PLZT陶瓷光生电压实验和拟合曲线图
Fig.5 Experimental and fitting curves of photovoltage of PLZT ceramic under irradiation of different light intensities
2.2. 光电-静电复合驱动器闭环位移控制数学模型
基于PLZT陶瓷片光生电压的数学模型,图6给出光电-静电复合驱动器的闭环位移控制仿真流程图.
图 6
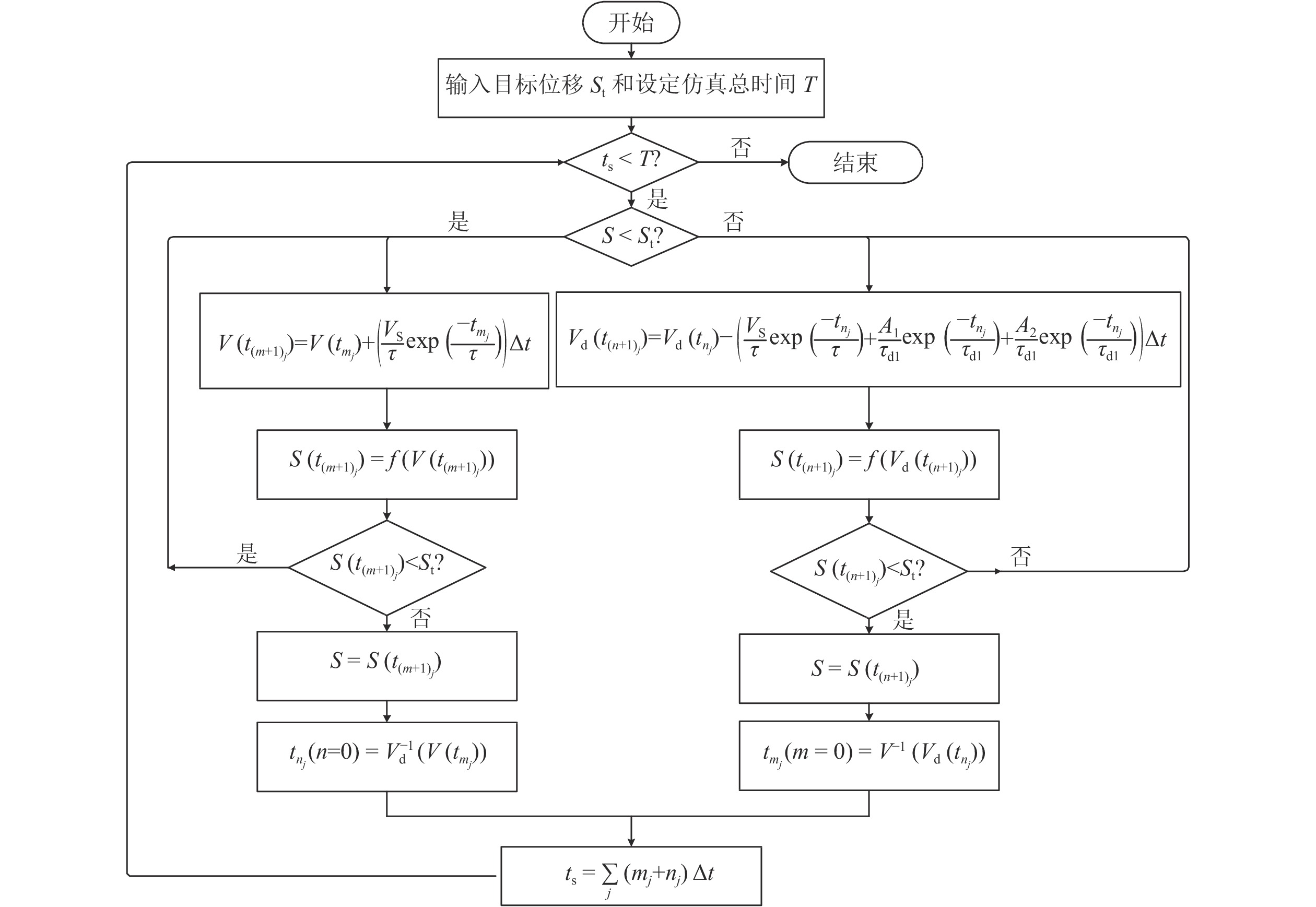
图 6 光电-静电复合驱动器输出位移闭环控制的流程框图
Fig.6 Flow chart of closed-loop control of output displacement for photovoltaic electrostatic hybrid actuator
综上可得光电-静电复合驱动器位移闭环控制数学模型:
式中:△t为采样周期;St为目标位移;j为控制周期数,因为每个控制周期不一定相等,周期可以表示为T=(mj+nj)△t,其中mj、nj分别为一个控制周期内光照阶段和光停阶段位移的采样周期数;
3. 结果与分析
基于表1中光电-静电复合驱动器的结构参数和已建立的力学模型,可得在不同驱动电压下ME和MT与上电极偏转位移的关系,如图7所示. 随着上电极偏转位移的增加,MT线性增加,ME呈现非线性增加的趋势. 从图7(a)可知,当下电极倾斜角为1.7°且驱动电压为10.45 V时,静电力矩与恢复力矩曲线有且仅有一个交点A0. 在点A0处,静电力矩等于恢复力矩,之后静电力矩的增加速率将远远大于恢复力矩,从而驱动上电极迅速向下偏转. A0点称为吸合点,对应的位移和电压分别为吸合位移和吸合电压. 在吸合点之前,驱动器为稳定状态;在吸合点之后,驱动器为非稳定状态. 如图7(a)可知,当下电极初始倾斜角为1.7°时,吸合位移为19.24 μm,吸合电压为10.45 V. 如图7(b)所示,当下电极初始倾斜角为0°时,此时的吸合点为A1,对应的吸合位移为22.02 μm,吸合电压为24.15 V. 可知,随着下电极初始倾斜角的增加,所需要的吸合电压变小,对应的吸合位移随之变小,即位移稳定状态范围缩小.
图 7

图 7 不同驱动电压下上电极末端位移与力矩的关系
Fig.7 Relation between displacement of upper electrode tip and torque under different driving voltages
在建立的光电-静电复合驱动器位移闭环控制数学模型的基础上,分别对具有不同初始倾斜角的下电极驱动器位移进行闭环仿真控制,分析和研究驱动性能. 仿真总时长设置为2 s,采样周期△t设为5 ms. 0~1.0 s时间区间(即第1阶段)的目标位移设置为5 μm,1.0~2.0 s时间区间(即第2阶段)的目标位移设置为10 μm. 如图8~10所示为光电-静电复合驱动器在不同辐射照度下的不同阶段位移闭环控制仿真曲线. 在仿真开始后,上电极的偏转位移随着光照时间的增加而迅速增加到第一目标值5 μm,在目标值附近波动直至第1阶段仿真结束. 进入第2阶段时,上电极的偏转位移迅速上升到第二目标值10 μm后并在目标值附近波动. 由闭环控制仿真数据可知,当下电极倾斜角为0°时,对应于目标位移为5 μm的驱动电压为15.66 V,对应于10 μm的驱动电压为20.49 V. 当下电极倾斜角为1.7°时,对应于目标位移为5 μm的驱动电压为7.24 V,对应于10 μm的驱动电压为9.31 V.
图 8
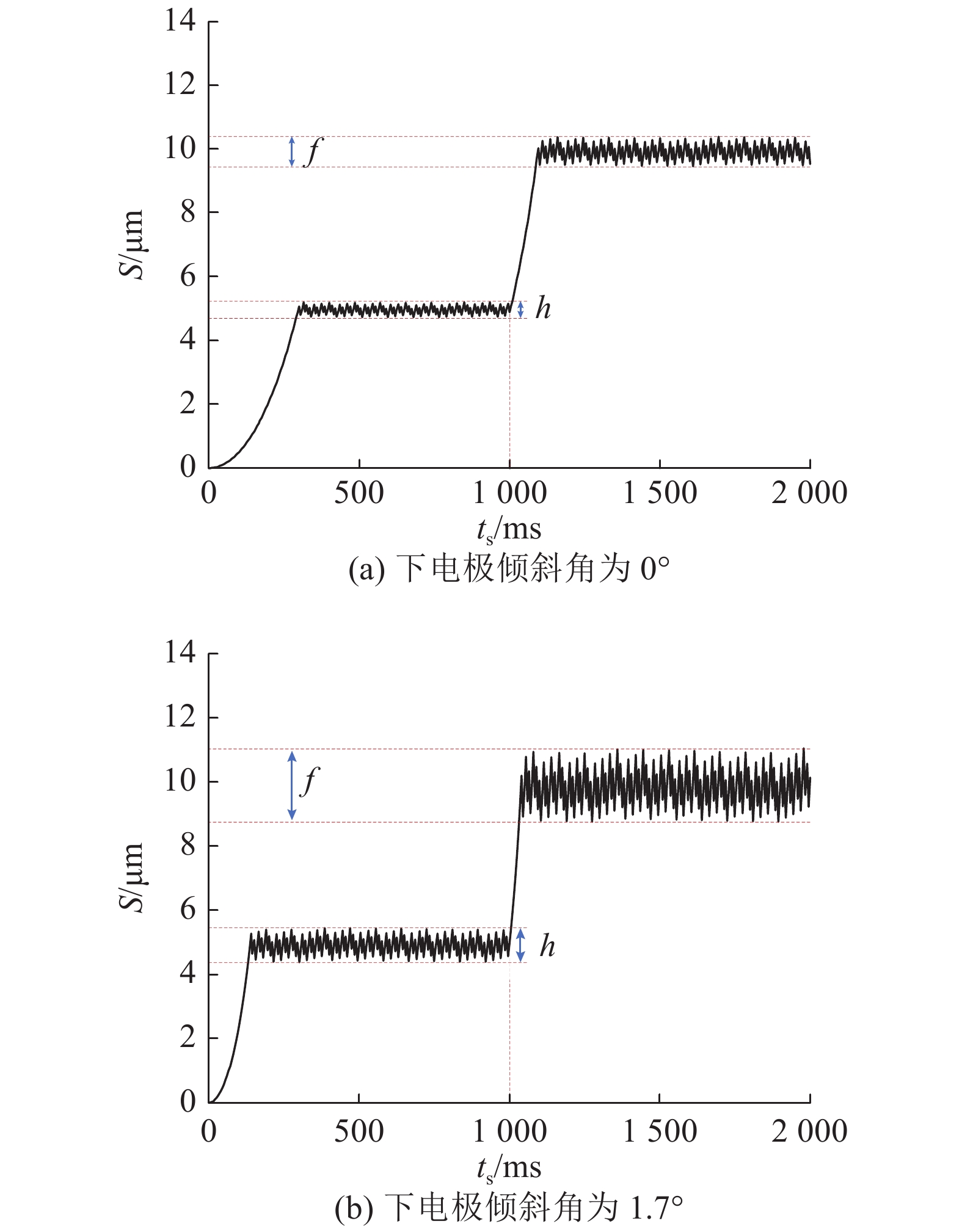
图 8 20 mW/cm2辐射照度下驱动器的位移闭环控制仿真曲线
Fig.8 Closed-loop displacement control of actuator illuminated by light intensity of 20 mW/cm2
图 9
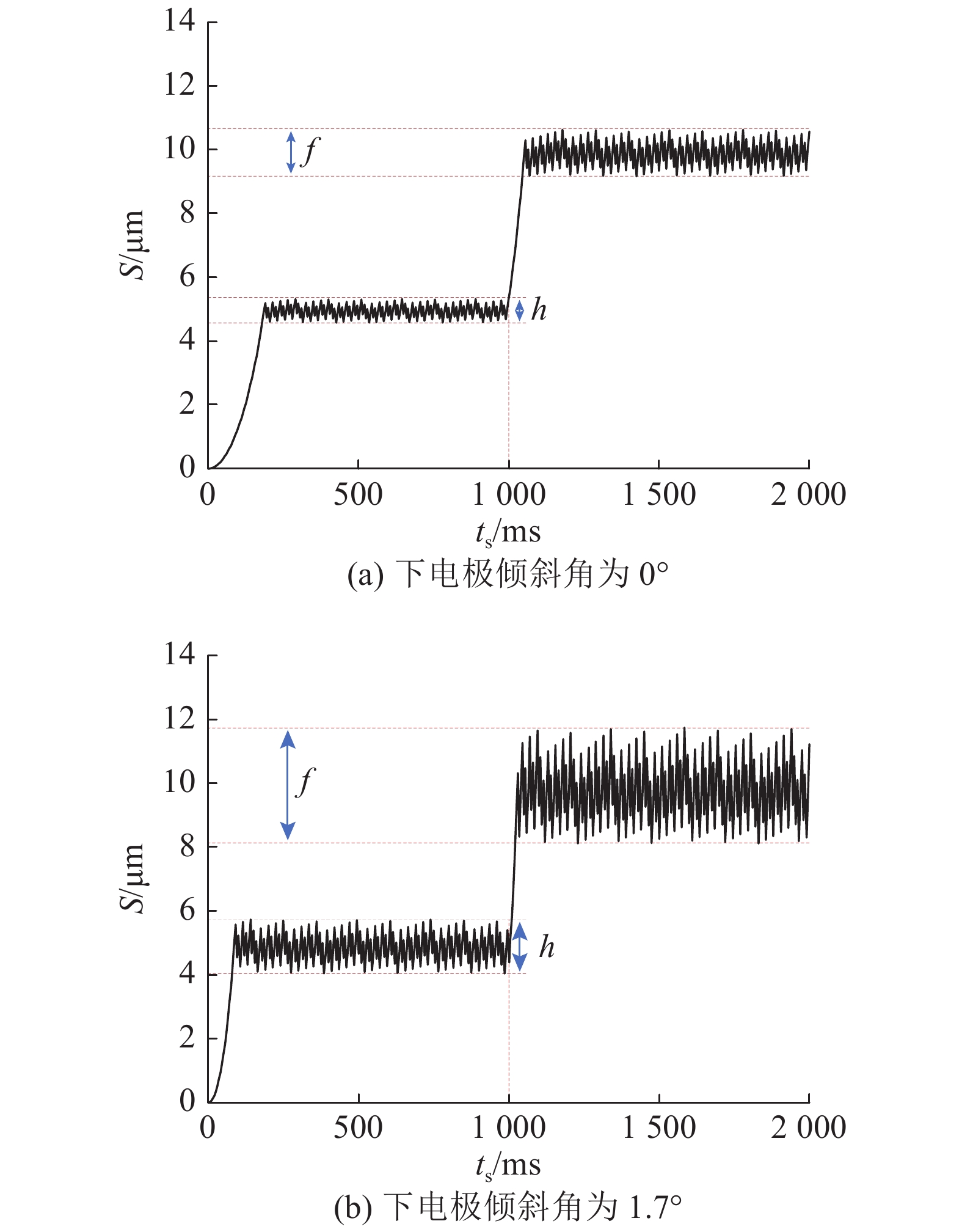
图 9 40 mW/cm2辐射照度下驱动器的位移闭环控制仿真曲线
Fig.9 Closed-loop displacement control of actuator illuminated by light intensity of 40 mW/cm2
图 10
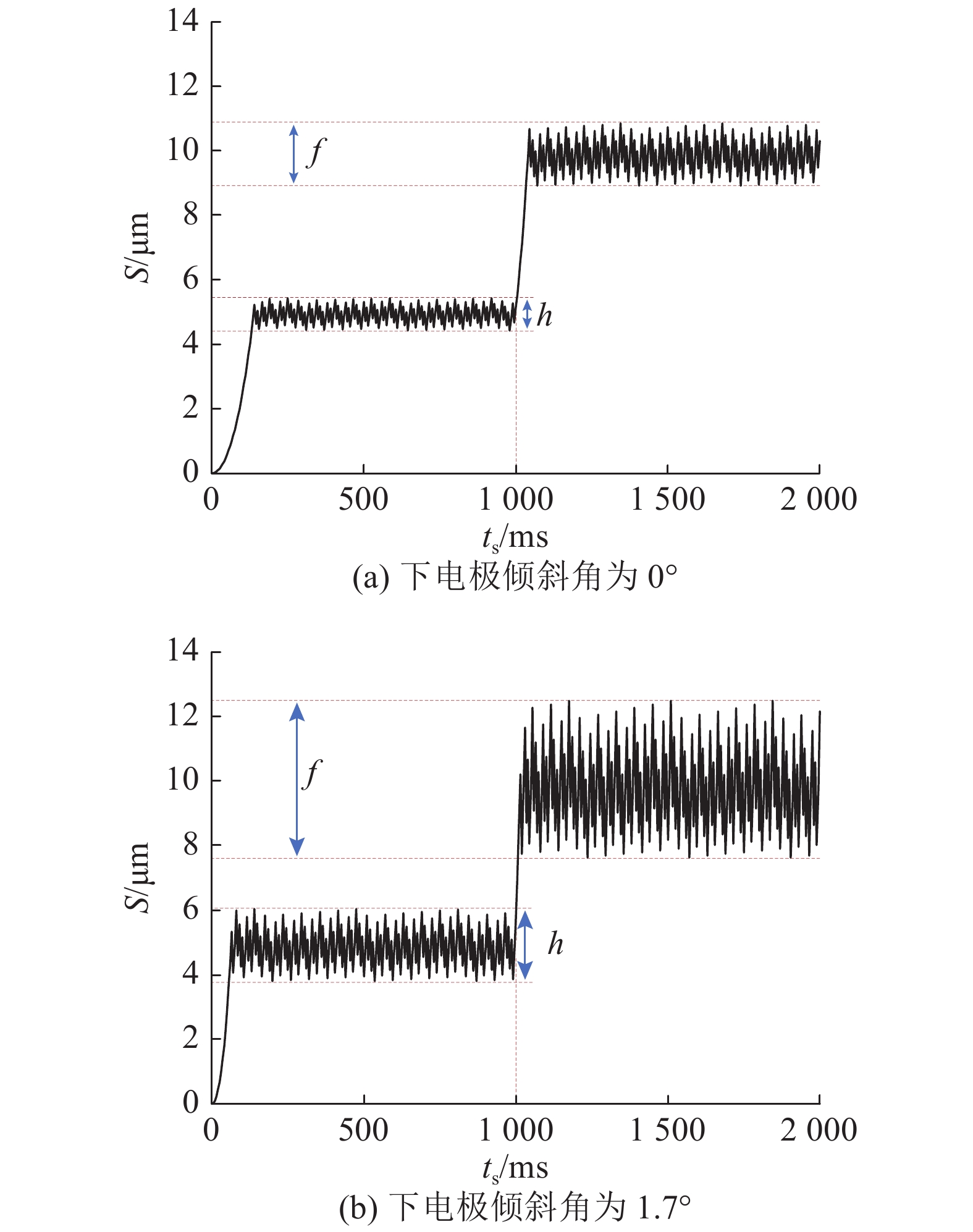
图 10 60 mW/cm2辐射照度下驱动器的位移闭环控制仿真曲线
Fig.10 Closed-loop displacement control of actuator illuminated by light intensity of 60 mW/cm2
从以上结果分析可知,通过控制光源能够实现对光电-静电复合驱动器的闭环位移控制. 通过对比表2中不同辐射照度下的驱动性能指标数据,可以得到以下结论.
表 2 不同辐射照度下驱动器的驱动性能
Tab.2
| E/(mW·cm−2) | θ0/(°) | ts/ms | h/μm | f/μm |
| 20 | 0 | 295 | 0.5 | 0.9 |
| 20 | 1.7 | 135 | 1.0 | 2.2 |
| 40 | 0 | 185 | 0.7 | 1.4 |
| 40 | 1.7 | 80 | 1.5 | 3.0 |
| 60 | 0 | 135 | 0.9 | 1.8 |
| 60 | 1.7 | 65 | 2.3 | 4.7 |
1) 随着辐射照度的增加,驱动器达到目标位移的响应速度随之增加. 在60 mW/cm2的辐射照度下,驱动器达到目标位移的响应时间仅约为20 mW/cm2辐射照度下的50%.
2) 驱动器的输出位移在达到目标位移后,在目标位移附近波动的最大范围随着辐射照度的增加而增大.
3) 在同一辐射照度下,随着下电极倾斜角的增加,驱动器达到目标位移的响应速度随之增加. 当下电极倾斜角为0°时,驱动器输出位移达到5 μm的响应时间约为下电极倾斜角为1.7°时的45%. 随着下电极倾斜角的增加,驱动器输出位移在达到目标位移之后,围绕目标位移波动的最大范围增大,即输出位移的控制精度下降.
4) 在同一辐射照度和相同下电极倾斜角的情况下,围绕5 μm目标位移的最大波动范围是围绕10 μm目标位移最大波动范围的50%. 由此可知,当目标位移接近吸合点位移时,位移控制精度会下降.
4. 结 语
本文基于PLZT陶瓷的光电效应,提出具有倾斜下电极的新型光电-静电复合驱动器. 利用该驱动器输出位移的闭环控制数学模型,对输出位移进行闭环控制仿真. 结果表明,光电-静电复合驱动器的输出位移可被成功地控制在吸合点位移之内的某一确定位置. 对比不同辐射照度和不同下电极倾斜角下的输出位移闭环控制曲线可知,随着辐射照度和下电极倾斜角的增大,驱动器输出位移达到目标位移的响应时间随之减小,即响应速度增大,但输出位移的控制精度减小. 在实际应用中,可以根据不同的应用场合,通过选择不同的辐射照度和下电极倾斜角度,得到所需的光电-静电复合驱动方式. 在目标位移和辐射照度一定的情况下,具有倾斜下电极结构的光电-静电复合驱动器输出位移的响应时间约为平行下电极结构的45%,因此具有倾斜下电极结构的光电-静电复合驱动器提高了驱动器的性能,为光电-静电复合驱动的工程应用奠定了基础.
参考文献
Photostrictive actuators for photonic control of shallow spherical shells
[J].DOI:10.1088/0964-1726/16/5/025 [本文引用: 1]
Theoretical investigation on wireless vibration control of thin beams using photostrictive actuators
[J].
Wireless active vibration control of thin cylindrical shells laminated with photostrictive actuators
[J].DOI:10.1177/1045389X11400344 [本文引用: 1]
基于0-3方向极化的PLZT作动器开口圆柱壳主动振动控制
[J].DOI:10.3969/j.issn.1000-3835.2013.11.022 [本文引用: 1]
Active vibration control of an open cylindrical shell based on a 0-3 polarized PLZT photostrictive actuator
[J].DOI:10.3969/j.issn.1000-3835.2013.11.022 [本文引用: 1]
基于光致形变材料的光驱动微夹钳
[J].
An optically driven microgripper based on photostrictive materials
[J].
光控压电混合驱动特性及影响因素分析
[J].DOI:10.3901/JME.2017.01.065 [本文引用: 1]
Driving characteristics and influencing factors of light controlled piezoelectric hybrid actuator
[J].DOI:10.3901/JME.2017.01.065 [本文引用: 1]
PLZT/PVDF层合柔性悬臂梁的驱动特性
[J].
Driving characteristics of PLZT/PVDF laminated flexible cantilever
[J].
The experimental analysis on the driving characteristics of photo response torsion actuator
[J].DOI:10.1177/1045389X20923092 [本文引用: 2]
PLZT陶瓷在多能场耦合下的光致伸缩效应
[J].DOI:10.3788/OPE.20152303.0760 [本文引用: 1]
Photostrictive effect of PLZT ceramic at coupling of multiple energy fields
[J].DOI:10.3788/OPE.20152303.0760 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}