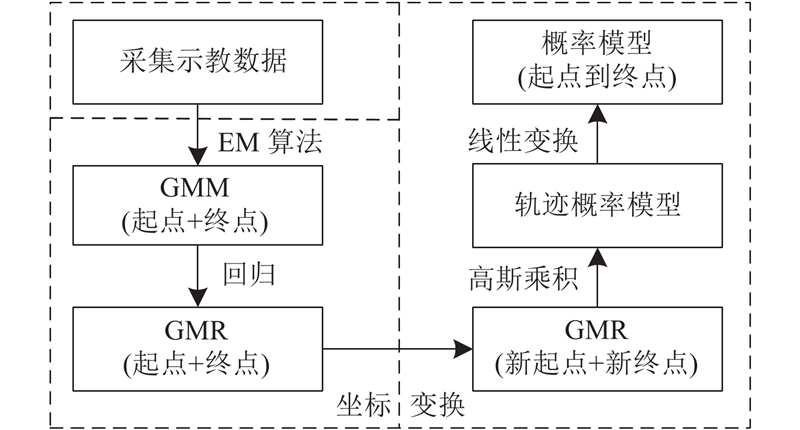
Aiming at human-robot cooperative transportation, current control strategies are difficult to guarantee both the compliant control for cooperative transportation and the accuracy of the end point, and lack sufficient flexibility to different tasks. A variable stiffiness control strategy was proposed for cooperative transportation based on imitation learning. Firstly, several human demonstrations of cooperative transportation were encoded in task parameterized Gaussian mixture model (TP-GMM) and a probabilistic model of trajectories under different transport conditions was learned. Secondly, combined with admittance control, an interactive model of variable stiffness at the end of the manipulator was established for transportation to realize compliant control. Besides, a strategy of switching between different transportation tasks was developed with a threshold method of interaction force. Finally, a cooperative transportation platform was built for experiments. Results show that the proposed approach can improve the position accuracy of the end point to 1.9 mm in specific tasks while achieving compliant control for cooperative transportation, and ensure that the end effector of the robot in specific tasks is controlled to moved in desired space and the switching of transportation tasks is available.
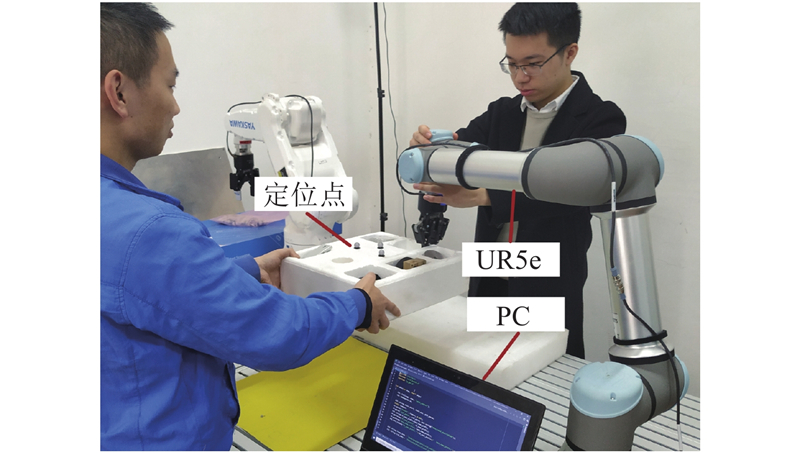
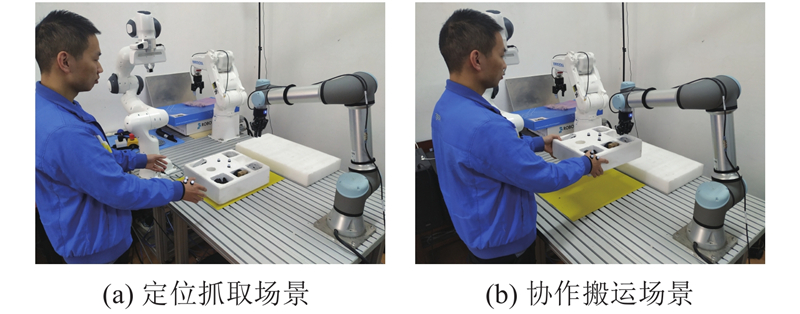
Fig.12
Experiment scene of human-robot cooperative transportation
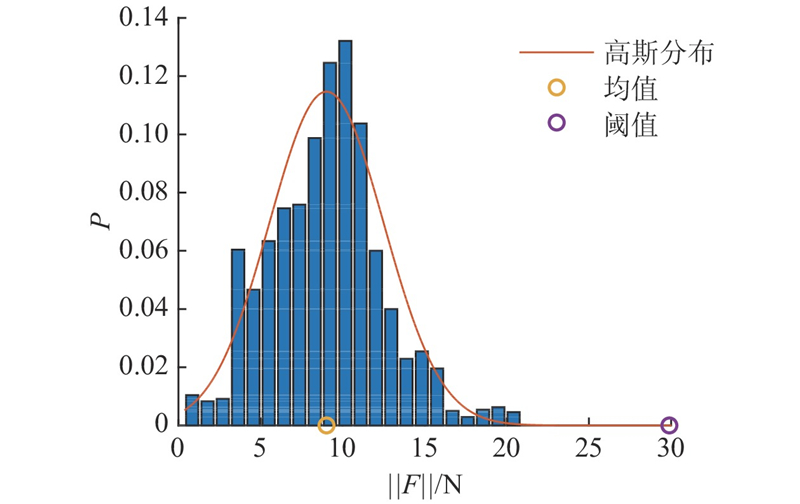
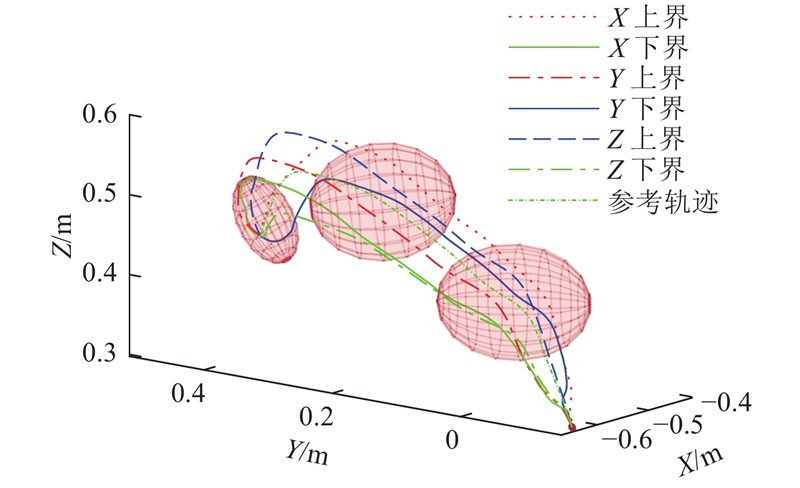
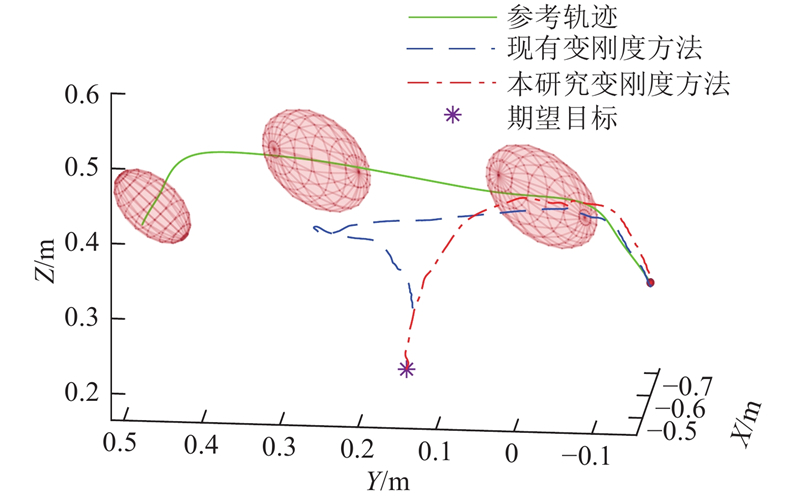
3.2. 边界实验
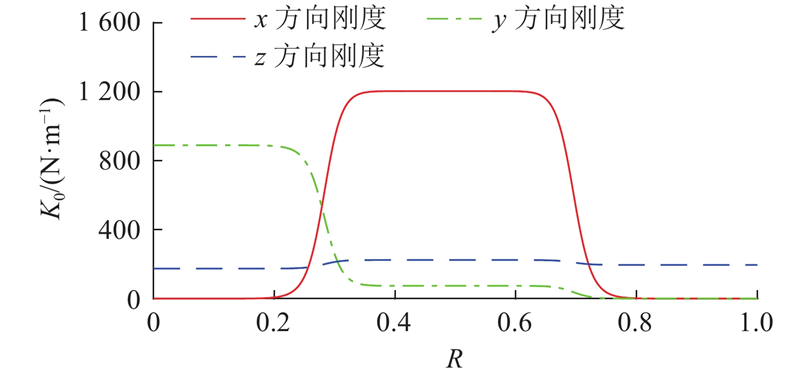
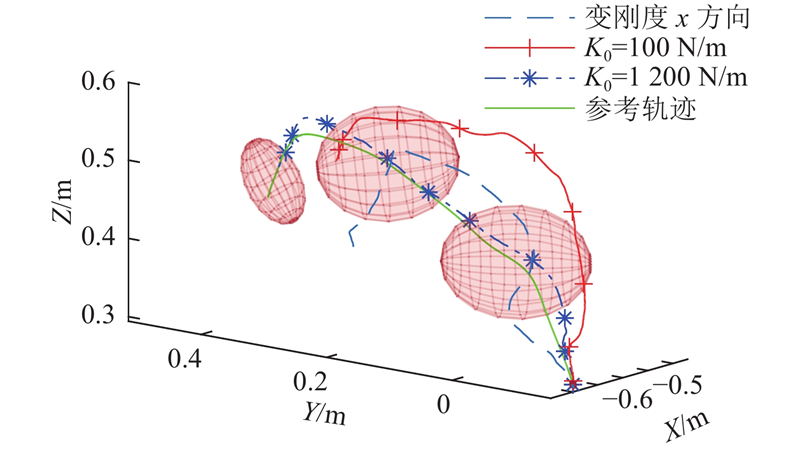
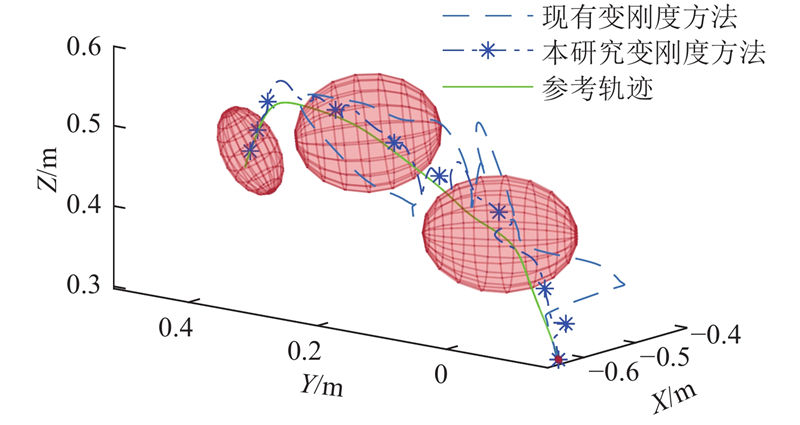
现有恒定刚度方法[13]中刚度系数在整条轨迹上恒定,变刚度方法[12]中刚度系数在不同高斯分布椭球内不同. 本研究变刚度方法刚度系数在高斯分布椭球内部由中心向外增加,在参考轨迹处刚度相同. 针对这3种方法进行交互实验对比,同一种情况下分别重复6次实验. 由于机械臂末端有六维力/力矩传感器对物体进行重力补偿,并且重量变化不大,不同重量结果类似,这里以及后面的实验展示的物体质量都是2 kg.
LYU Er-li. Human-robot interaction based on imitation learning and hidden Markov model [D]. Shenzhen: Harbin Institute of Technology, Shenzhen, 2016.
CALDERONE L. Collaborative robots working in manufacturing [EB/OL]. (2016-02-05)[2021-01-21]. https://www.manufacturingtomorrow.com/article/2016/02/collaborative-robots-working-in-manufacturing/7672/.
BUSSY A, GERGONDET P, KHEDDAR A, et al. Proactive behavior of a humanoid robot in a haptic transportation task with a human partner [C]// 2012 IEEE RO-MAN: the 21st IEEE International Symposium on Robot and Human Interactive Communication. Paris: IEEE, 2012: 962-967.
AGRAVANTE D J, CHERUBINI A, BUSSY A, et al. Collaborative human-humanoid carrying using vision and haptic sensing [C]// 2014 IEEE International Conference on Robotics and Automation (ICRA). Hong Kong: IEEE, 2014, 607-612.
AGRAVANTE D J, CHERUBINI A, BUSSY A, et al. Human-humanoid joint haptic table carrying task with height stabilization using vision [C]// 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo: IEEE, 2013, 4609–4614.
VOGT D, STEPPUTTIS S, GREHL S, et al. A system for learning continuous human-robot interactions from human-human demonstrations [C]// 2017 IEEE International Conference on Robotics and Automation (ICRA). Singapore: IEEE, 2017, 2882-2889.
GU Y, THOBBI A, SHENG W. Human-robot collaborative manipulation through imitation and reinforcement learning [C]// 2011 IEEE International Conference on Information and Automation. Shenzhen: IEEE, 2011, 151-156.
EVRARD P, GRIBOVSKAYA E, CALINON S, et al. Teaching physical collaborative tasks: object-lifting case study with a humanoid [C]// 2009 9th IEEE-RAS International Conference on Humanoid Robots. Paris: IEEE, 2009, 399-404.
ROZO L, BRUNO D, CALINON S, et al. Learning optimal controllers in human-robot cooperative transportation tasks with position and force constraints [C]// 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Hamburg: IEEE, 2015, 1024-1030.
ROZO L, BRUNO D, CALINON S, et al. Learning force and position constraints in human-robot cooperative transportation [C]// The 23rd IEEE International Symposium on Robot and Human Interactive Communication. Edinburgh: IEEE, 2014, 619-624.
CALINON S
A tutorial on task-parameterized movement learning and retrieval
[J]. Intelligent Service Robotics, 2016, 9 (1): 1- 29
MEDINA J R, LAWITZKY M, MORTL A, et al. An experience-driven robotic assistant acquiring human knowledge to improve haptic cooperation [C]// 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco: IEEE, 2011, 2416-2422.
DUMORA J, GEFFARD F, BIDARD C, et al. Robot assistance selection for large object manipulation with a human [C]// 2013 IEEE International Conference on Systems, Man, and Cybernetics. Manchester: IEEE, 2013, 1828-1833.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}