基于模仿学习的变刚度人机协作搬运控制
Variable stiffiness control for human-robot cooperative transportation based on imitation learning
基于模仿学习的变刚度人机协作搬运控制 |
| 汤自林,高霄,肖晓晖 |
|
Variable stiffiness control for human-robot cooperative transportation based on imitation learning |
| Zi-lin TANG,Xiao GAO,Xiao-hui XIAO |
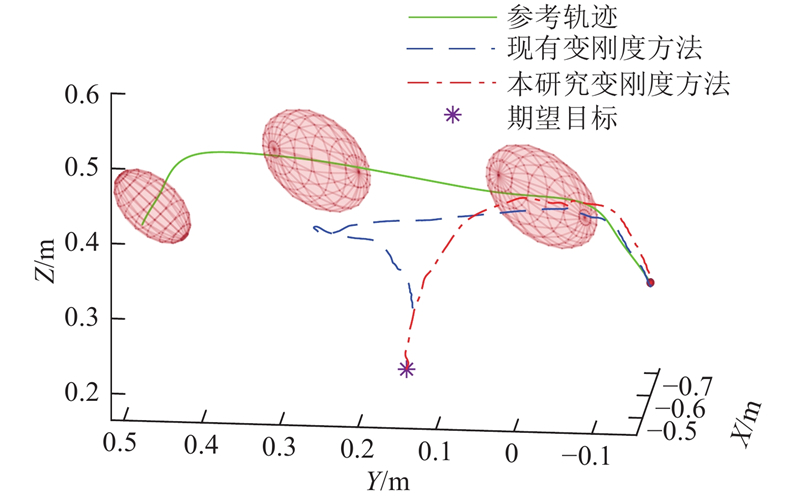
| 图 17 搬运任务切换对应机械臂末端轨迹 |
| Fig.17 Trajectory of end effector corresponding to transportation tast switch |
|
|