|
|
|
| Comprehensive optimization of gripping gesture and force of soft-rigid robotic hand |
Tian-lei WANG1,2( ),Li-hang FENG1,Zhen-xing SUN1,Yun KE2,Chao-chao LI2,Ji-wei HU2 ),Li-hang FENG1,Zhen-xing SUN1,Yun KE2,Chao-chao LI2,Ji-wei HU2 |
1. College of Electrical Engineering and Control Science, Nanjing Tech University, Nanjing 211816, China
2. Changxing Huaqiang Electronics Limited Company, Huzhou 313119, China |
|
|
|
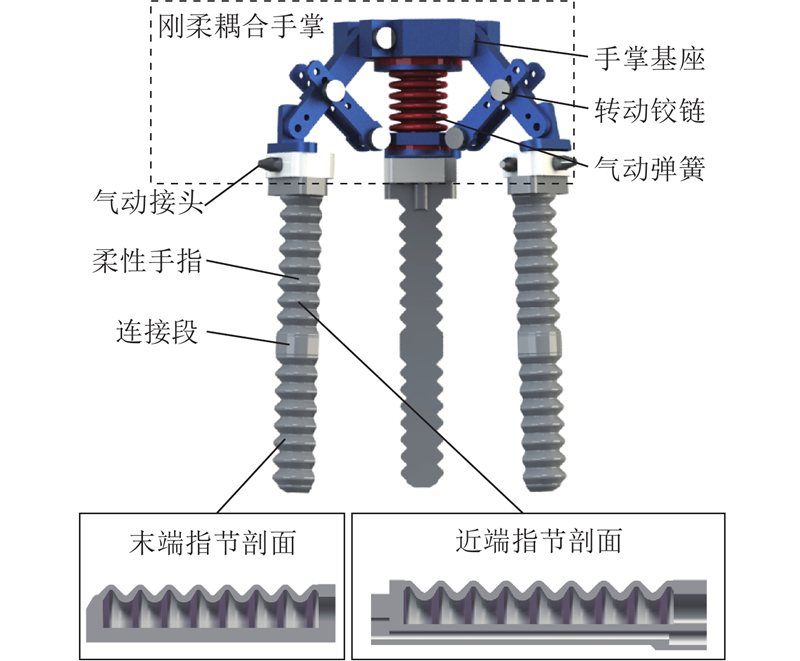
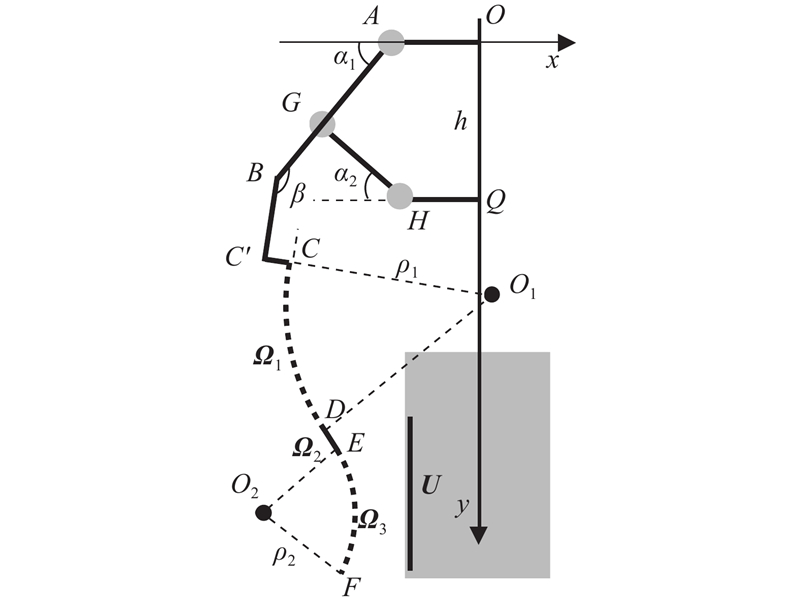
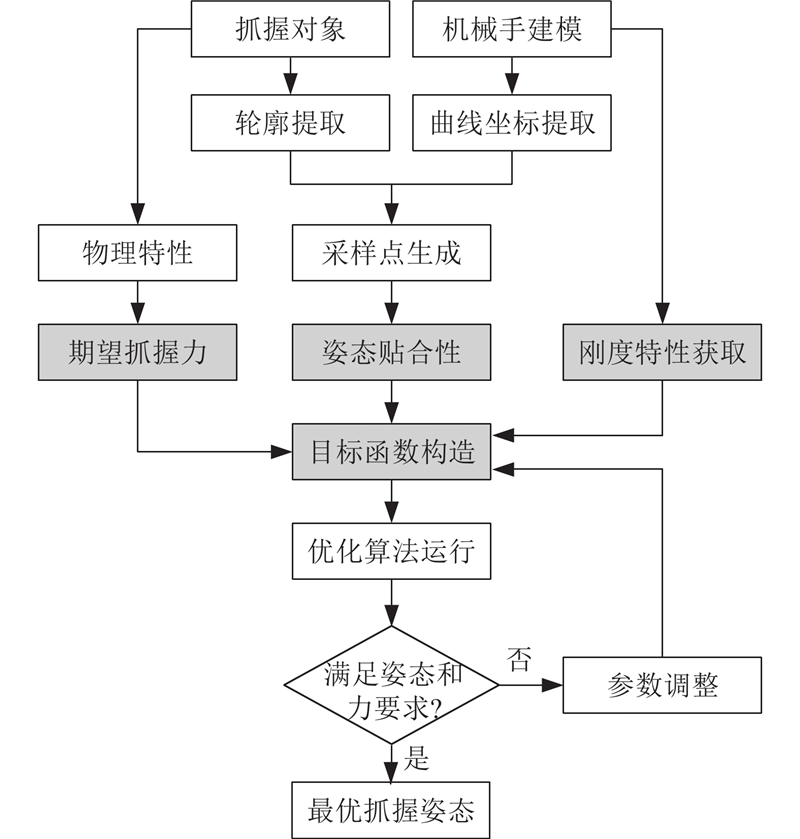
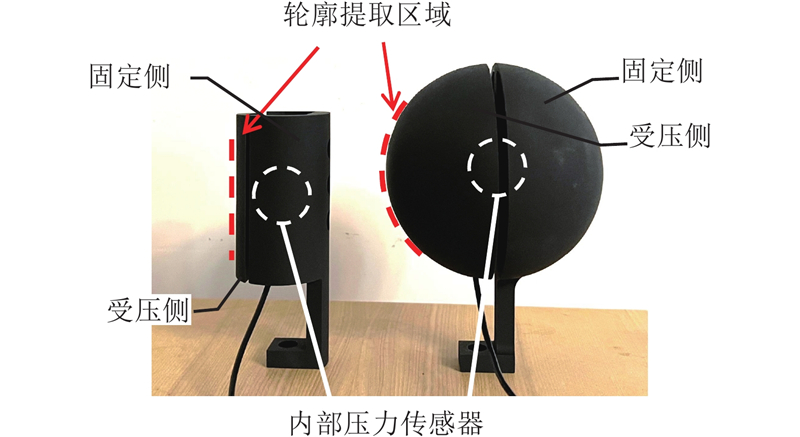
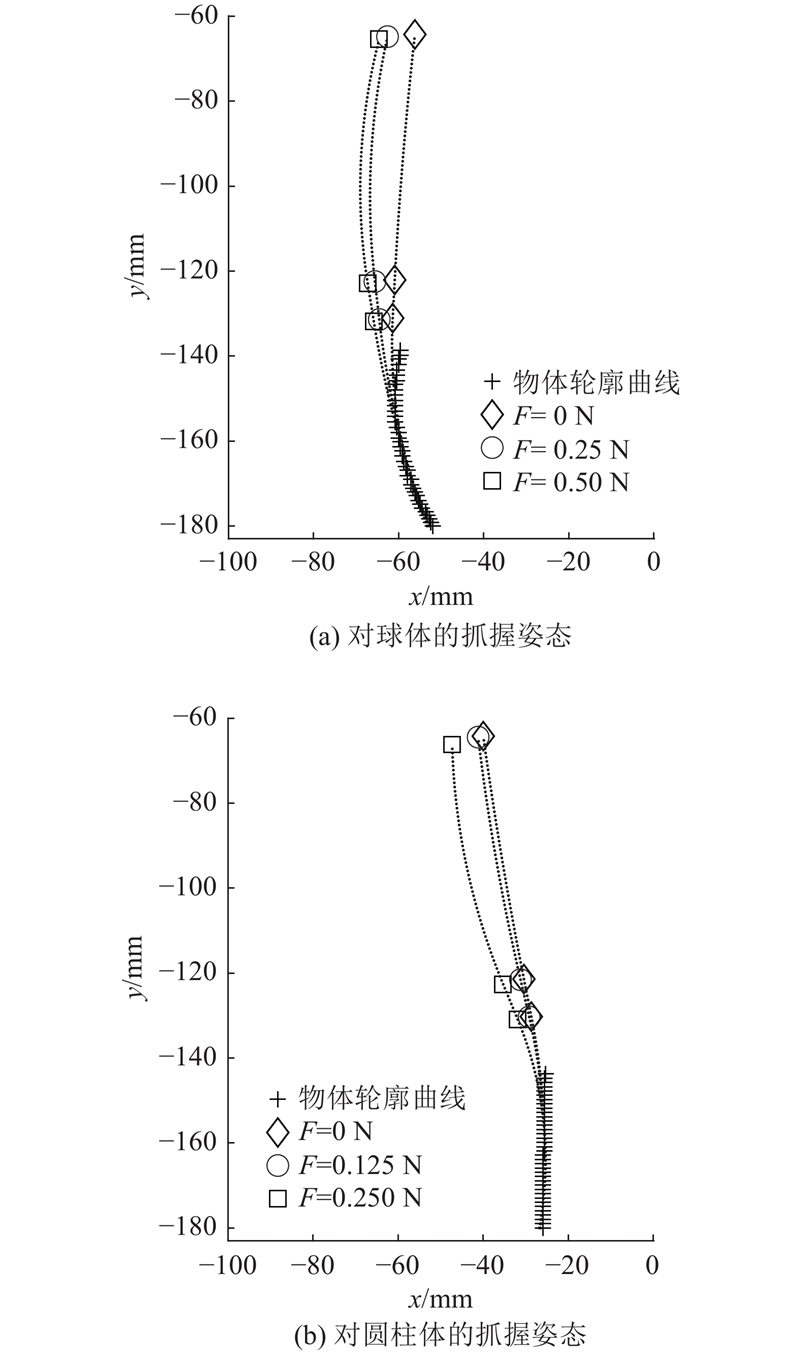
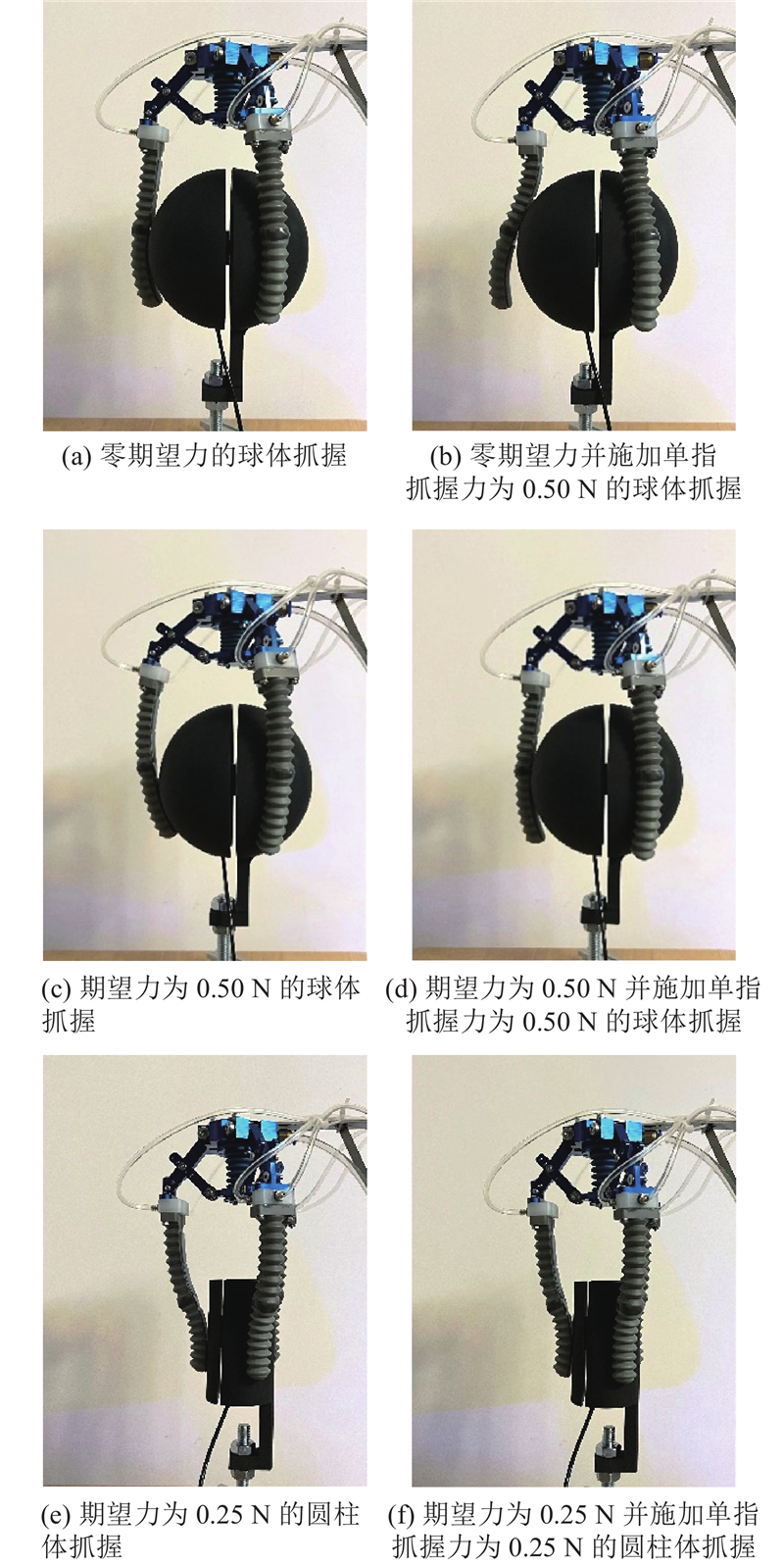
Abstract Aiming at the problem that a soft-rigid robotic hand not only needs appropriate gripping gesture when grasping objects, but also needs appropriate finger stiffness to match up with the gripping force, a comprehensive gripping gesture and force optimization method was investigated. The geometry model of the robotic hand was established, and the relationship between the soft finger rigidity and the actuation pressure was acquired. Based on the established models, the similarity function of the finger gesture curve and the object counter curve, and the expected finger rigidity function related to the expected gripping force were both established. The comprehensive optimization objective function was synthesized by combining the gesture similarity function and the finger rigidity function. The optimal gripping gestures were calculated under different expected forces using the established objective function. A gripping experiment was conducted on different optimal gestures with different external gripping forces, and the influence of the extra gripping forces on the gesture stability was evaluated. Experimental results show that the proposed comprehensive optimization method acquires both proper gesture and force according to different control requirements, and stable and reliable gripping performance of the robotic hand is achieved.
|
|
Received: 29 March 2023
Published: 27 December 2023
|
|
|
| Fund: 国家自然科学基金资助项目(52201398);江苏省自然科学基金资助项目(BK20220343) |
刚柔耦合机械手的抓握姿态和力综合优化方法
针对刚柔耦合机械手在抓握物体时既要有合适的抓握姿态,又要有与抓握力匹配的手指刚度的问题,研究抓握姿态和力综合优化方法. 建立机械手的几何模型以获得手指刚度与驱动压强的关系,基于所建模型构造手指姿态曲线与被抓握物体轮廓曲线的贴合度函数、与期望抓握力有关的手指期望刚度函数,并结合姿态贴合度函数和手指刚度函数构造综合优化目标函数. 利用所建目标函数计算不同期望抓握力下的最优抓握姿态,通过实验对比不同最优姿态下施加额外抓握力对抓握稳定性的影响. 实验结果表明,所提综合优化方法能够良好兼顾抓握姿态和抓握力的控制要求,实现刚柔耦合机械手的稳定可靠抓握.
关键词:
柔性机械手,
自适应抓握,
非线性优化,
姿态优化,
几何建模
|
|
| [1] |
周宇杰, 吴强, 贺磊盈, 等 名优茶采摘机器人的系统设计与试验[J]. 机械工程学报, 2022, 58 (19): 12- 23
ZHOU Yu-jie, WU Qiang, HE Lei-ying, et al Design and experiment of intelligent picking robot for famous tea[J]. Journal of Mechanical Engineering, 2022, 58 (19): 12- 23
|
|
|
| [2] |
赵丕洋, 洪荣晶, 方成刚 基于ROS的UR5机器人控制系统设计[J]. 南京工业大学学报: 自然科学版, 2022, 44 (2): 161- 168
ZHAO Pi-yang, HONG Rong-jing, FANG Cheng-gang Design of UR5 robot control system based on ROS[J]. Journal of Nanjing Tech University: Natural Science Edition, 2022, 44 (2): 161- 168
|
|
|
| [3] |
何源福, 夏毅敏, 龙斌, 等 TBM钢拱架拼接机械手抓取对接机构[J]. 浙江大学学报: 工学版, 2020, 54 (11): 2204- 2213
HE Yuan-fu, XIA Yi-min, LONG Bin, et al Grasping docking mechanism of TBM steel arch splicing robot[J]. Journal of Zhejiang University: Engineering Science, 2020, 54 (11): 2204- 2213
|
|
|
| [4] |
CHEN X, ZHANG X, HUANG Y, et al A review of soft manipulator research, applications, and opportunities[J]. Journal of Field Robotics, 2022, 39 (3): 281- 311
doi: 10.1002/rob.22051
|
|
|
| [5] |
SUI D, ZHU Y, ZHAO S, et al A bioinspired soft swallowing gripper for universal adaptable grasping[J]. Soft Robotics, 2022, 9 (1): 36- 56
doi: 10.1089/soro.2019.0106
|
|
|
| [6] |
TAWK C, GILLETT A, IN HET PANHUIS M, et al A 3D-printed omni-purpose soft gripper[J]. IEEE Transactions on Robotics, 2019, 35 (5): 1268- 1275
doi: 10.1109/TRO.2019.2924386
|
|
|
| [7] |
HAINSWORTH T, SMITH L, ALEXANDER S, et al A fabrication free, 3D printed, multi-material, self-sensing soft actuator[J]. IEEE Robotics and Automation Letters, 2020, 5 (3): 4118- 4125
doi: 10.1109/LRA.2020.2986760
|
|
|
| [8] |
CHEN R, ZHANG Z, GUO J, et al Variable stiffness electroadhesion and compliant electroadhesive grippers[J]. Soft Robotics, 2022, 9 (6): 1074- 1082
doi: 10.1089/soro.2021.0083
|
|
|
| [9] |
徐凯, 刘欢 多杆连续体机构: 构型与应用[J]. 机械工程学报, 2018, 54 (13): 25- 33
XU Kai, LIU Huan Multi-backbone continuum mechanisms: forms and applications[J]. Journal of Mechanical Engineering, 2018, 54 (13): 25- 33
doi: 10.3901/JME.2018.13.025
|
|
|
| [10] |
AMANOV E, NGUYEN T D, MARKMANN S, et al Toward a flexible variable stiffness endoport for single-site partial nephrectomy[J]. Annals of Biomedical Engineering, 2018, 46 (10): 1498- 1510
doi: 10.1007/s10439-018-2060-4
|
|
|
| [11] |
GALLOWAY K C, BECKER K P, PHILLIPS B, et al Soft robotic grippers for biological sampling on deep reefs[J]. Soft Robotics, 2016, 3 (1): 23- 33
doi: 10.1089/soro.2015.0019
|
|
|
| [12] |
SU Y, FANG Z, ZHU W, et al A high-payload proprioceptive hybrid robotic gripper with soft origamic actuators[J]. IEEE Robotics and Automation Letters, 2020, 5 (2): 3003- 3010
doi: 10.1109/LRA.2020.2974438
|
|
|
| [13] |
ABONDANCE S, TEEPLE C B, WOOD R J A dexterous soft robotic hand for delicate in-hand manipulation[J]. IEEE Robotics and Automation Letters, 2020, 5 (4): 5502- 5509
doi: 10.1109/LRA.2020.3007411
|
|
|
| [14] |
李三平, 孙腾佳, 袁龙强, 等 气动软体采摘机械手设计及实验研究[J]. 工程设计学报, 2022, 29 (6): 684- 694
LI San-ping, SUN Teng-jia, YUAN Long-qiang, et al Design and experimental research of pneumatic soft picking manipulator[J]. Chinese Journal of Engineering Design, 2022, 29 (6): 684- 694
doi: 10.3785/j.issn.1006-754X.2022.00.085
|
|
|
| [15] |
LIU S, WANG F, ZHANG G, et al. A novel soft-robotic gripper with vertically plane contact of the object [C]// 2019 IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems. Suzhou: IEEE, 2019: 1381-1385.
|
|
|
| [16] |
朱银龙, 赵虎, 苏海军, 等 四指软体机械手机械特性分析与抓取试验[J]. 农业机械学报, 2022, 53 (9): 434- 442
ZHU Yin-long, ZHAO Hu, SU Hai-jun, et al Mechanical performance analysis and grasping experiment for four-finger soft manipulator[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53 (9): 434- 442
doi: 10.6041/j.issn.1000-1298.2022.09.045
|
|
|
| [17] |
田德宝, 毕学文, 张欣欣, 等 变腔室气动软体机械手结构设计与实验[J]. 机床与液压, 2021, 49 (11): 109- 112
TIAN De-bao, BI Xue-wen, ZHANG Xin-xin, et al Structure design and experiment of variable chamber pneumatic soft manipulator[J]. Machine Tool and Hydraulics, 2021, 49 (11): 109- 112
doi: 10.3969/j.issn.1001-3881.2021.11.022
|
|
|
| [18] |
NETZEV M, ANGLERAUD A, PIETERS R Soft robotic gripper with compliant cell stacks for industrial part handling[J]. IEEE Robotics and Automation Letters, 2020, 5 (4): 6821- 6828
doi: 10.1109/LRA.2020.3020546
|
|
|
| [19] |
LIU C H, CHUNG F M, CHEN Y, et al Optimal design of a motor-driven three-finger soft robotic gripper[J]. IEEE/ASME Transactions on Mechatronics, 2020, 25 (4): 1830- 1840
doi: 10.1109/TMECH.2020.2997743
|
|
|
| [20] |
吴全会, 邵旭辉, 潘柏松, 等 复合驱动双指柔性机械手的设计与控制[J]. 浙江大学学报: 工学版, 2022, 56 (9): 1845- 1855
WU Quan-hui, SHAO Xu-hui, PAN Bai-song, et al Design and control of compound driven two-finger flexible manipulator[J]. Journal of Zhejiang University: Engineering Science, 2022, 56 (9): 1845- 1855
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|