|
|
|
| Design and control of compound driven two-finger flexible manipulator |
Quan-hui WU1,2( ),Xu-hui SHAO1,2,Bai-song PAN1,2,*(),Luo-jie SHI1,2 ),Xu-hui SHAO1,2,Bai-song PAN1,2,*(),Luo-jie SHI1,2 |
1. Key Laboratory of Special Purpose Equipment and Advanced Processing Technology, Ministry of Education and Zhejiang Province, Zhejiang University of Technology, Hangzhou 310032, China
2. College of Mechanical Engineering, Zhejiang University of Technology, Hangzhou 310032, China |
|
|
|
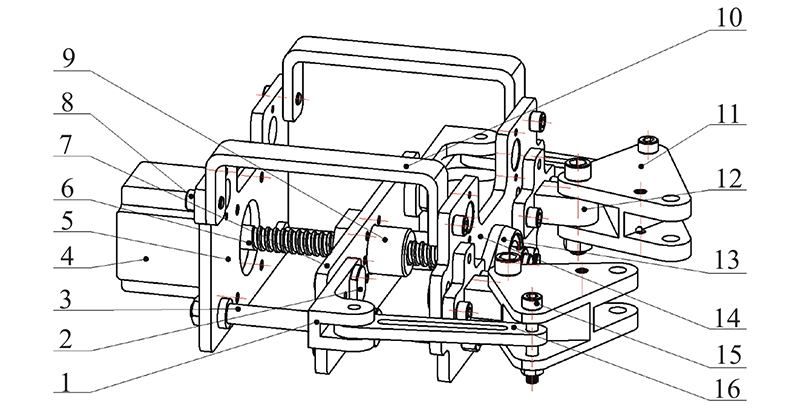
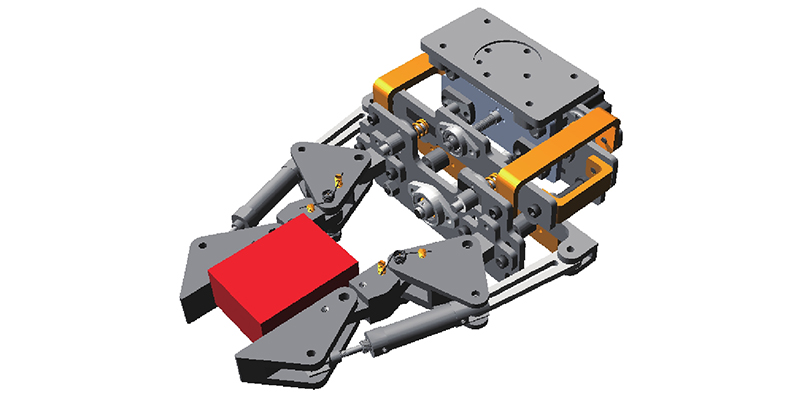
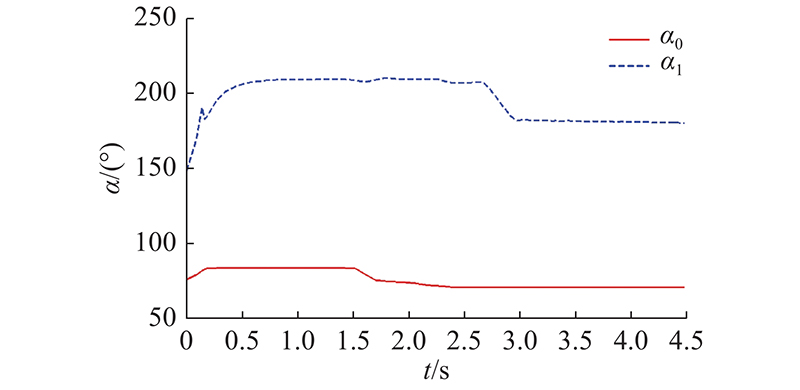
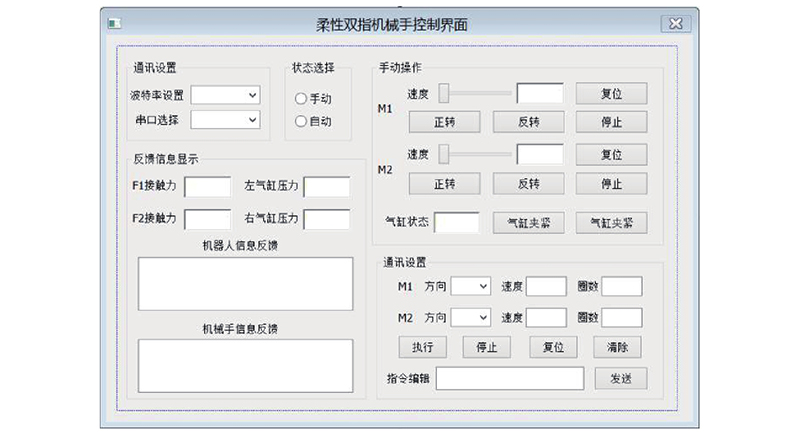
Abstract In order to meet the grasping requirements of complex target parts with complex shapes, diverse physical properties, and different sizes in the industrial field, the imitating human finger joints and two finger fit grasping principles were used, and a two finger flexible manipulator was designed to realize the grasping target parts and achieve the state of envelope fitting. Firstly, the structural characteristics of the target part contour were analyzed. Secondly, the grasping contour characteristics were extracted to obtain the structural motion principle of the flexible manipulator. According to the motion principle of the flexible manipulator, the mathematical modeling and simulation analysis of the envelope clamping process were carried out. Finally, the platform was built to verify the flexible manipulator performance. The manipulator is composed of flexible mechanical fingers, driving parts and position compensation mechanism, which can realize the adaptive grasping of cylinder, cone and cuboid parts, and has high grasping reliability and stability.
|
|
Received: 11 September 2021
Published: 28 September 2022
|
|
|
| Fund: 国家自然科学基金资助项目(51475425);浙江省自然科学基金资助项目(LQ20E050021);浙江省科技计划资助项目(2021C01097) |
|
Corresponding Authors:
Bai-song PAN
E-mail: wuqh@zjut.edu.cn;panbsz@zjut.edu.cn
|
复合驱动双指柔性机械手的设计与控制
为了满足工业领域中形状多变、物性多样、尺寸不一的复杂目标件抓取需求,模仿人手指关节并依据双指贴合抓取原理,设计达到包络贴合状态的双指柔性机械手. 分析目标件外形轮廓的结构特点,提取目标件轮廓的抓取特征,获得柔性机械手的结构运动原理.根据柔性机械手运动原理,进行目标件包络夹取过程的数学建模与仿真分析, 搭建平台验证柔性机械手的性能.该机械手由柔性机械手指、驱动部件和位置补偿机构组成,可以实现圆柱体、圆锥件、长方体类零件的适应性抓取,具有较高的抓取可靠性与稳定性.
关键词:
复合驱动,
柔性机械手,
机械设计,
伺服控制,
抓取实验
|
|
| [1] |
周济 智能制造: “中国制造2025”的主攻方向[J]. 中国机械工程, 2015, 26 (17): 2273- 2284
ZHOU Ji Intelligent manufacturing: main direction of “Made in China 2025”[J]. China Mechanical Engineering, 2015, 26 (17): 2273- 2284
doi: 10.3969/j.issn.1004-132X.2015.17.001
|
|
|
| [2] |
郑泽钿, 陈银清, 林文强, 等 工业机器人上下料技术及数控车床加工技术组合应用研究[J]. 组合机床与自动化加工技术, 2013, (7): 105- 109
ZHENG Ze-dian, CHEN Yin-qing, LIN Wen-qiang, et al Study on groupware applications about industrial robot to load-unload workpiece and the processing technology of NC lathe[J]. Modular Machine Tool and Automatic Manufacturing Technique, 2013, (7): 105- 109
doi: 10.3969/j.issn.1001-2265.2013.07.032
|
|
|
| [3] |
JAYASWAL K, PALWALIA D K, KUMAR S Analysis of robust control method for the flexible manipulator in reliable operation of medical robots during COVID-19 pandemic[J]. Microsystem Technologies, 2020, 27: 2103- 2116
|
|
|
| [4] |
BIAN Y, GAO Z, LV X, et al Theoretical and experimental study on vibration control of flexible manipulator based on internal resonance[J]. Journal of Vibration and Control, 2018, 24 (15): 3321- 3337
doi: 10.1177/1077546317704792
|
|
|
| [5] |
WANG Y, ZHANG R, JU F, et al A light cable-driven manipulator developed for aerial robots: structure design and control research[J]. International Journal of Advanced Robotic Systems, 2020, 17 (3): 1- 14
|
|
|
| [6] |
席浩洋, 王挺, 姚辰, 等 基于电机驱动的仿生柔性机械手研究[J]. 高技术通讯, 2019, 29 (4): 362- 370
XI Hao-yang, WANG Ting, YAO Chen, et al Research on bionic soft gripper drived by motor[J]. Chinese High Technology Letters, 2019, 29 (4): 362- 370
doi: 10.3772/j.issn.1002-0470.2019.04.007
|
|
|
| [7] |
PHUTANE U, ROLLER M, BJÖRKENSTAM S, et al. Optimal control simulations of two-finger precision grasps [M]// KECSKEMÉTHY A, GEU FLORES F. Multibody Dynamics 2019. [S. l.]: Springer, 2020: 60-67.
|
|
|
| [8] |
LIONEL B. Enhancing versatility and safety of industrial grippers with adaptive robotic fingers [C]// 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems. Hamburg: IEEE, 2015: 2911-2916.
|
|
|
| [9] |
ILIEVSKI F, MAZZEO A D, SHEPHERD R F, et al Soft robotics for chemists[J]. Angewandte Chemie, 2011, 50 (8): 1890- 1895
doi: 10.1002/anie.201006464
|
|
|
| [10] |
LITTLEFIELD Z, ZHU S, KOURTEV H, et al. Evaluating end-effector modalities for warehouse picking: a vacuum gripper vs a 3-finger underactuated hand [C]// 2016 IEEE International Conference on Automation Science and Engineering. Fort Worth: IEEE, 2016: 1190-1195.
|
|
|
| [11] |
ANVER H M C M, MUTLU R, ALICI G. 3D printing of a thin-wall soft and monolithic gripper using fused filament fabrication [C]// 2017 IEEE International Conference on Advanced Intelligent Mechatronics. Munich: IEEE, 2017: 442-447.
|
|
|
| [12] |
董增雅, 高谦, 高国华, 等 柔性吞咽机械手的结构设计与样机试验[J]. 机电工程, 2018, 35 (12): 1304- 1309
DONG Zeng-ya, GAO Qian, GAO Guo-hua, et al Structure design and prototype test of flexible swallowing manipulator[J]. Journal of Mechanical and Electrical Engineering, 2018, 35 (12): 1304- 1309
doi: 10.3969/j.issn.1001-4551.2018.12.009
|
|
|
| [13] |
金波, 林龙贤 果蔬采摘欠驱动机械手爪设计及其力控制[J]. 机械工程学报, 2014, 50 (19): 1- 8
JIN Bo, LIN Long-xian Design and force control of an underactuated robotic hand for fruit and vegetable picking[J]. Journal of Mechanical Engineering, 2014, 50 (19): 1- 8
doi: 10.3901/JME.2014.19.001
|
|
|
| [14] |
王作桓, 莫浩明, 梁国威, 等 一种柔性机械手设计与分析[J]. 机电工程技术, 2019, 48 (9): 135- 137
WANG Zuo-huan, MO Hao-ming, LIANG Guo-wei, et al Design and analysis of a flexible manipulator[J]. Mechanical and Electrical Engineering Technology, 2019, 48 (9): 135- 137
doi: 10.3969/j.issn.1009-9492.2019.09.043
|
|
|
| [15] |
耿德旭, 刘洪波, 赵云伟, 等 气动四指柔性机械手结构功能和抓取实验研究[J]. 机床与液压, 2019, 47 (9): 14- 17
GENG De-xu, LIU Hong-bo, ZHAO Yun-wei, et al Structure design and grasp experiment of pneumatic flexible four-finger hand[J]. Machine Tool and Hydraulics, 2019, 47 (9): 14- 17
doi: 10.3969/j.issn.1001-3881.2019.09.003
|
|
|
| [16] |
杨孟涛, 黎泽伦, 杨永刚 一种组合式气动柔性机械手设计[J]. 液压与气动, 2020, (5): 52- 55
YANG Meng-tao, LI Ze-lun, YANG Yong-gang Design of a combined pneumatic flexible manipulator[J]. Chinese Hydraulics and Pneumatics, 2020, (5): 52- 55
doi: 10.11832/j.issn.1000-4858.2020.05.009
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|