|
|
|
| Predefined-time control of continuum space manipulator based on fuzzy compensation |
Meng DING( ),Xiu-tao GU,Xian-jie ZHENG,Yu GUO*() ),Xiu-tao GU,Xian-jie ZHENG,Yu GUO*() |
| School of Automation, Nanjing University of Science and Technology, Nanjing 210094, China |
|
|
|
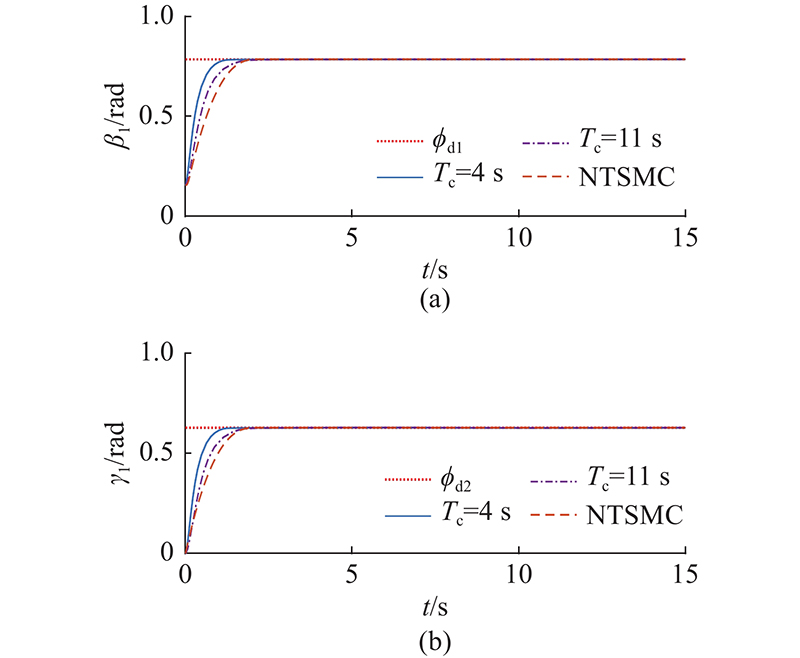
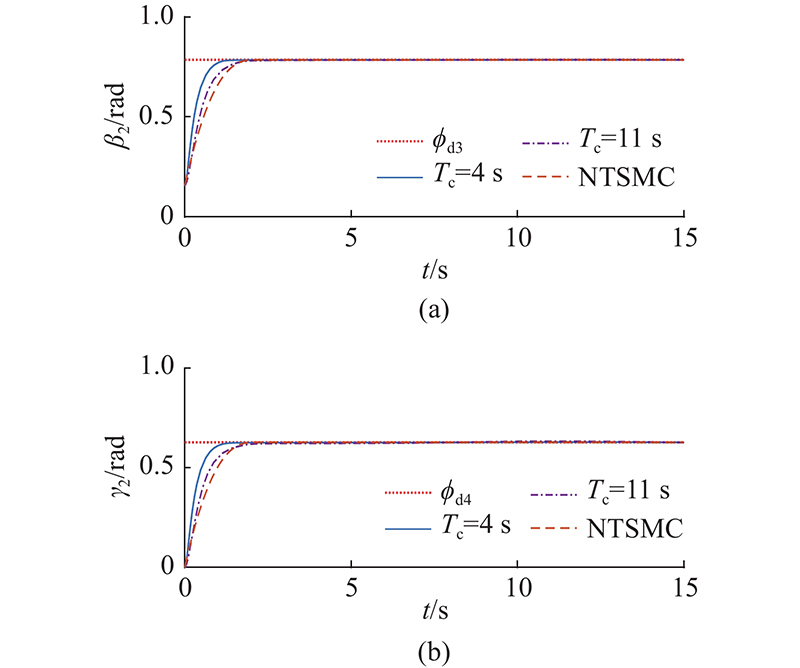
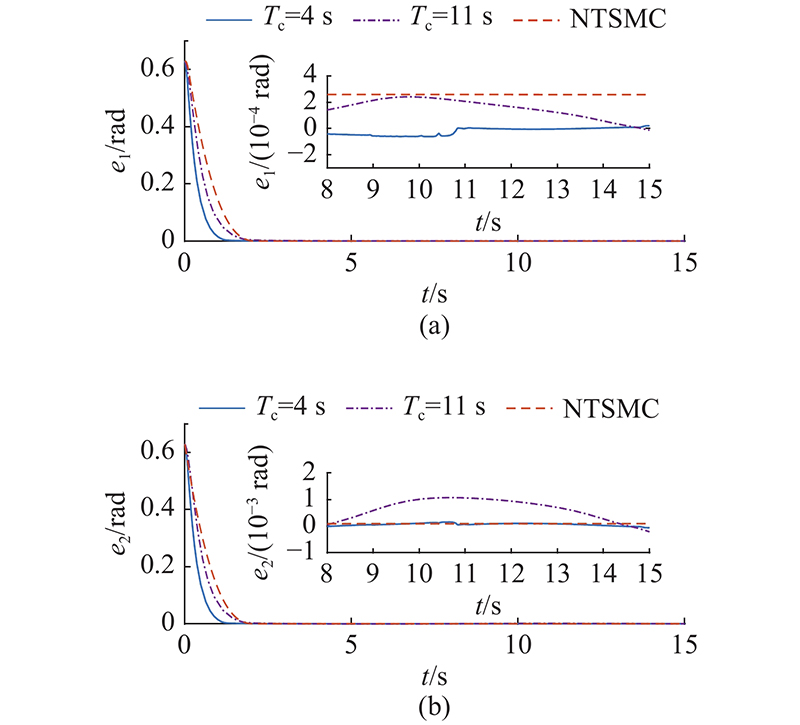
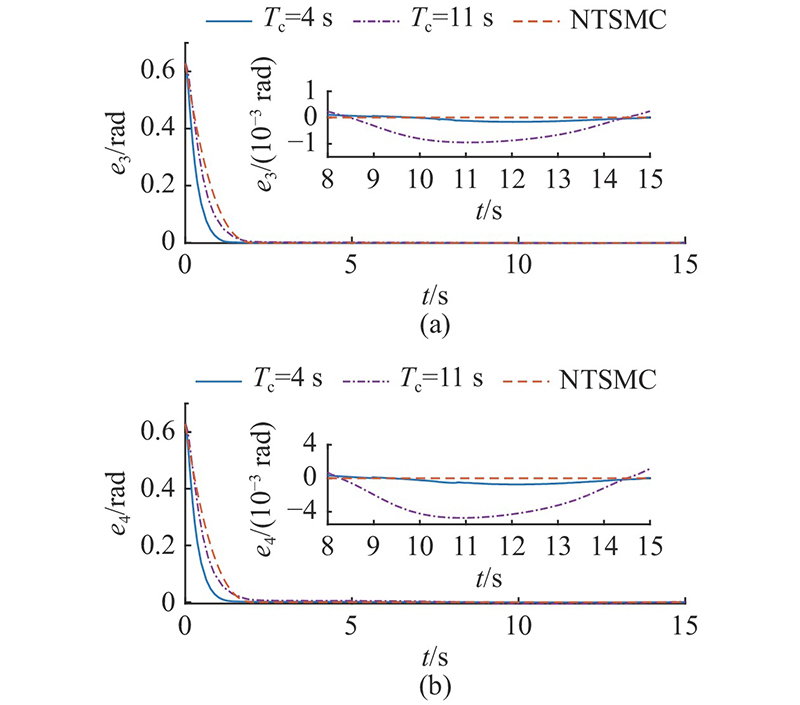
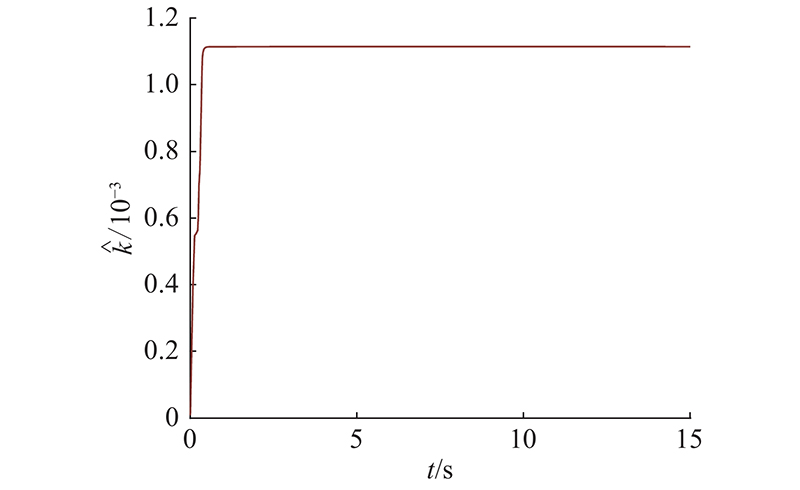
Abstract For the multi-segment cable-driven continuum space manipulator system, a predefined-time attitude control method based on fuzzy compensation was proposed, considering the external time-varying disturbances and parameter uncertainties. A fuzzy estimator was designed to estimate the system switching gain and compensate the unknown bounded total disturbance. Based on the theory of predefined time stability, a sliding mode-based predefined-time control method was presented to make the manipulator system reach the stable state within a predefined time. Compared with the control method based on the finite-time theory, the settling time of the proposed control method was independent of the initial state of the system and was preset according to the actual system requirements. Furthermore, the proposed method had better control performance in terms of convergence rate and accuracy. Based on Lyapunov stability theory, the stability of the closed-loop system was proved. Simulation results show that the proposed control method can make the system attitude angle error converge fast and the predefined time stable.
|
|
Received: 15 March 2022
Published: 30 June 2022
|
|
|
| Fund: 国家自然科学基金资助项目(61973167);中国航天科技集团公司第八研究院产学研合作基金资助项目(SAST2020?062);江苏高校优势学科建设工程资助项目;江苏省研究生科研与实践创新计划项目(KYCX22_0455) |
|
Corresponding Authors:
Yu GUO
E-mail: 824355614@qq.com;guoyu@njust.edu.cn
|
基于模糊补偿的连续型空间机械臂预定时间控制
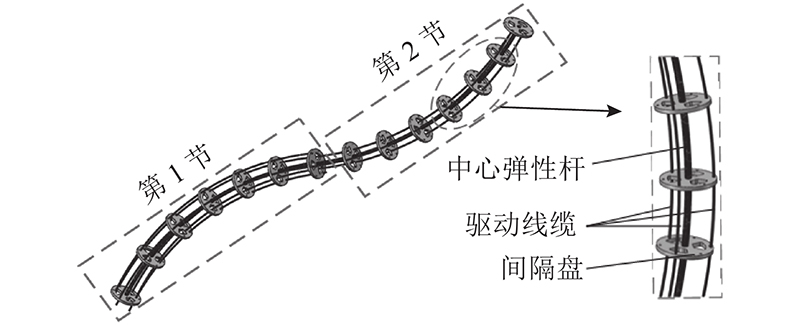
针对多节线驱连续型空间机械臂系统,在考虑存在外界时变干扰与参数不确定的情况下,提出基于模糊补偿的预定时间姿态控制方法. 设计模糊估计器估计系统切换增益,补偿未知有界总干扰. 基于预定时间稳定性理论,结合滑模控制,提出预定时间控制方法,使机械臂系统在预先设定时间内到达稳定状态. 与基于有限时间理论的控制方法相比,所提基于预定时间控制方法的稳定时间与系统初始状态无关,可以根据实际系统需求预先设置,并且所提方法在系统收敛速度与精度上具有更优的控制性能. 基于Lyapunov稳定性理论证明闭环系统的稳定性. 仿真结果表明,所提控制方法使系统姿态角误差快速收敛,并且预定时间稳定.
关键词:
线缆驱动,
连续型机械臂,
空间机械臂,
预定时间控制,
模糊控制
|
|
| [1] |
MOGHADDAM B M, CHHABRA R On the guidance, navigation and control of in-orbit space robotic missions: a survey and prospective vision[J]. Acta Astronautica, 2021, 184: 70- 100
doi: 10.1016/j.actaastro.2021.03.029
|
|
|
| [2] |
OUYANG X, MENG D, WANG X, et al Hybrid rigid-continuum dual-arm space robots: modeling, coupling analysis, and coordinated motion planning[J]. Aerospace Science and Technology, 2021, 116: 106861
doi: 10.1016/j.ast.2021.106861
|
|
|
| [3] |
PALMER D, AXINTE D Active uncoiling and feeding of a continuum arm robot[J]. Robotics and Computer Integrated Manufacturing, 2019, 56: 107- 116
doi: 10.1016/j.rcim.2018.09.003
|
|
|
| [4] |
TONAPI M M, GODAGE I S, WALKER I D. Next generation rope-like robot for in-space inspection [C]// 2014 IEEE Aerospace Conference. Big Sky: IEEE, 2014: 1-13.
|
|
|
| [5] |
JIANG D, CAI Z, PENG H, et al Coordinated control based on reinforcement learning for dual-arm continuum manipulators in space capture missions[J]. Journal of Aerospace Engineering, 2021, 34 (6): 4021087
doi: 10.1061/(ASCE)AS.1943-5525.0001335
|
|
|
| [6] |
IVANESCU M, POPESCU D, POPESCU N A decoupled sliding mode control for a continuum arm[J]. Advanced Robotics, 2015, 29 (13): 831- 845
doi: 10.1080/01691864.2015.1035323
|
|
|
| [7] |
ALQUMSAN A A, KHOO S, NORTON M Robust control of continuum robots using Cosserat rod theory[J]. Mechanism and Machine Theory, 2019, 131: 48- 61
doi: 10.1016/j.mechmachtheory.2018.09.011
|
|
|
| [8] |
ALQUMSAN A A, KHOO S, NORTON M Multi-surface sliding mode control of continuum robots with mismatched uncertainties[J]. Meccanica, 2019, 54: 2307- 2316
doi: 10.1007/s11012-019-01072-6
|
|
|
| [9] |
QI P, LIU C, ATAKA A, et al Kinematic control of continuum manipulators using a fuzzy model-based approach[J]. IEEE Transactions on Industrial Electronics, 2016, 63 (8): 5022- 5035
doi: 10.1109/TIE.2016.2554078
|
|
|
| [10] |
PILTAN F, KIM C H, KIM J Adaptive fuzzy-based fault-tolerant control of a continuum robotic system for maxillary sinus surgery[J]. Applied Sciences, 2019, 9 (12): 2490
doi: 10.3390/app9122490
|
|
|
| [11] |
ZHONG C, GUO Y, YU Z, et al Finite-time attitude control for flexible spacecraft with unknown bounded disturbance[J]. Transactions of the Institute of Measurement and Control, 2016, 38 (2): 240- 249
doi: 10.1177/0142331214566223
|
|
|
| [12] |
JIANG B, HU Q, FRISWELL M I Fixed-time attitude control for rigid spacecraft with actuator saturation and faults[J]. IEEE Transactions on Control Systems Technology, 2016, 24 (5): 1892- 1898
doi: 10.1109/TCST.2016.2519838
|
|
|
| [13] |
SÁNCHEZ-TORRES J D, DEFOORT M, MUÑOZ-VÁZQUEZ A J. A second order sliding mode controller with predefined-time convergence [C]// 15th International Conference on Electrical Engineering, Computing Science and Automatic Control. Mexico City: IEEE, 2018: 1-4.
|
|
|
| [14] |
WANG F, MIAO Y, LI C, et al Attitude control of rigid spacecraft with predefined-time stability[J]. Journal of the Franklin Institute, 2020, 357 (7): 4212- 4221
doi: 10.1016/j.jfranklin.2020.01.001
|
|
|
| [15] |
SÁNCHEZ-TORRES J D, GÓMEZ-GUTIÉRREZ D, LÓPEZ E, et al A class of predefined-time stable dynamical systems[J]. IMA Journal of Mathematical Control and Information, 2018, 35: i1- i29
doi: 10.1093/imamci/dnx004
|
|
|
| [16] |
王坚强 模糊多准则决策方法研究综述[J]. 控制与决策, 2008, 6 (23): 601- 606
WANG Jian-qiang Overview on fuzzy multi-criteria decision-making approach[J]. Control and Decision, 2008, 6 (23): 601- 606
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|