|
|
|
| Ensemble probabilistic model based variable impedance for robotic grinding force control |
Wan-jin GUO1,2,3( ),Wu-duan ZHAO1,Qian-hui LI1,Li-jun ZHAO2,4,Chu-qing CAO3,4 ),Wu-duan ZHAO1,Qian-hui LI1,Li-jun ZHAO2,4,Chu-qing CAO3,4 |
1. Key Laboratory of Road Construction Technology and Equipment, Ministry of Education, Chang’an University, Xi'an 710064, China
2. State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150001, China
3. Post-Doctoral Research Center, Wuhu HIT Robot Technology Research Institute Limited Company, Wuhu 241007, China
4. Yangtze River Delta HIT Robot Technology Research Institute, Wuhu 241007, China |
|
|
|
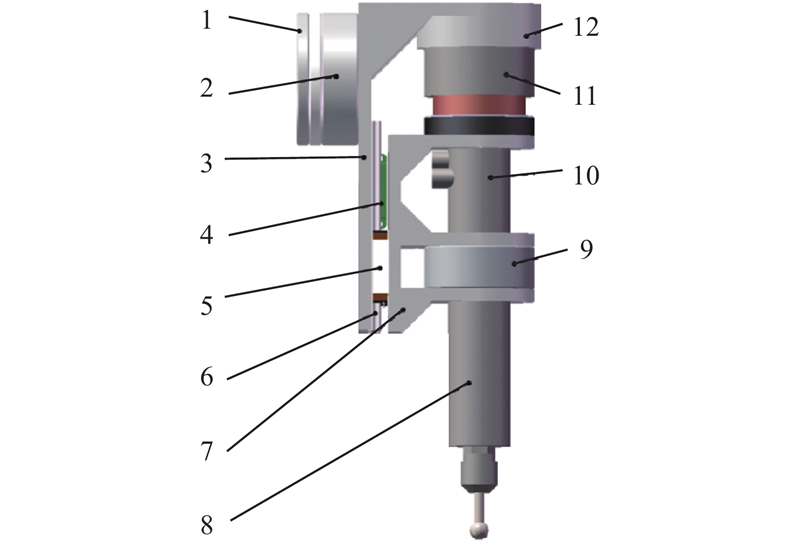
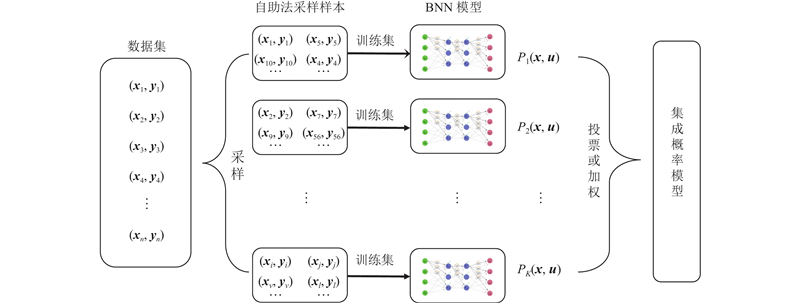
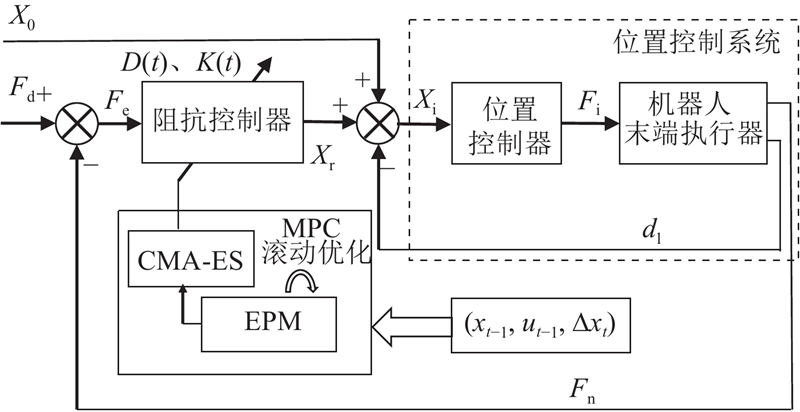
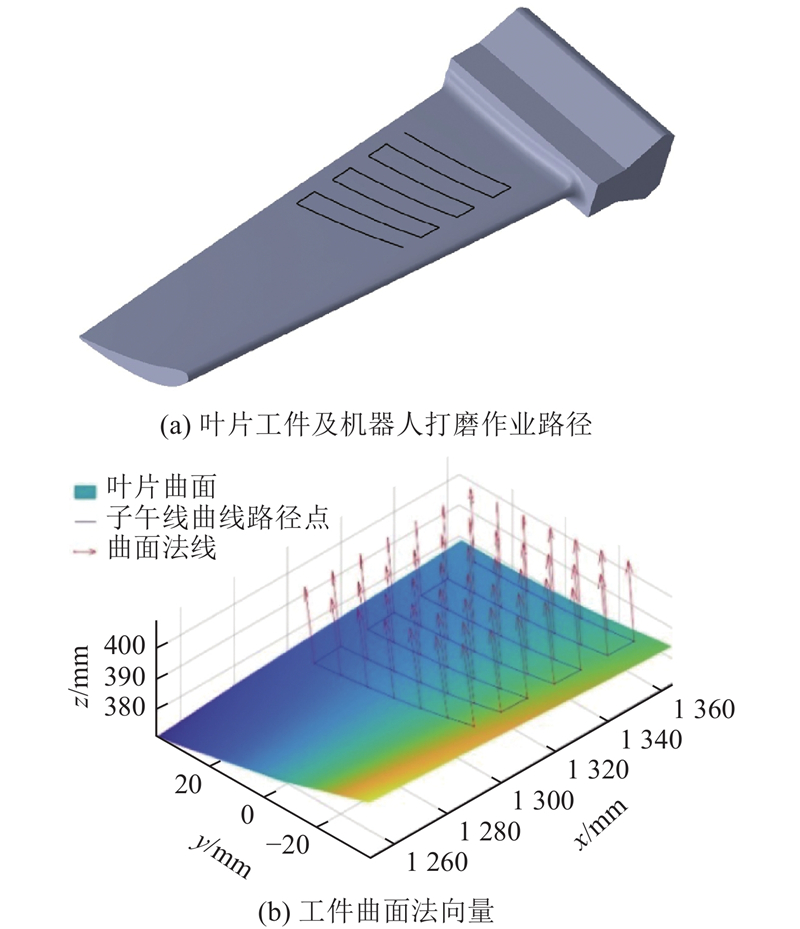
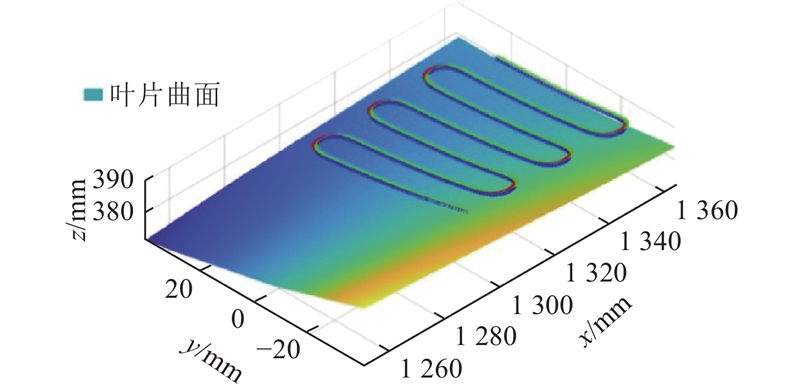
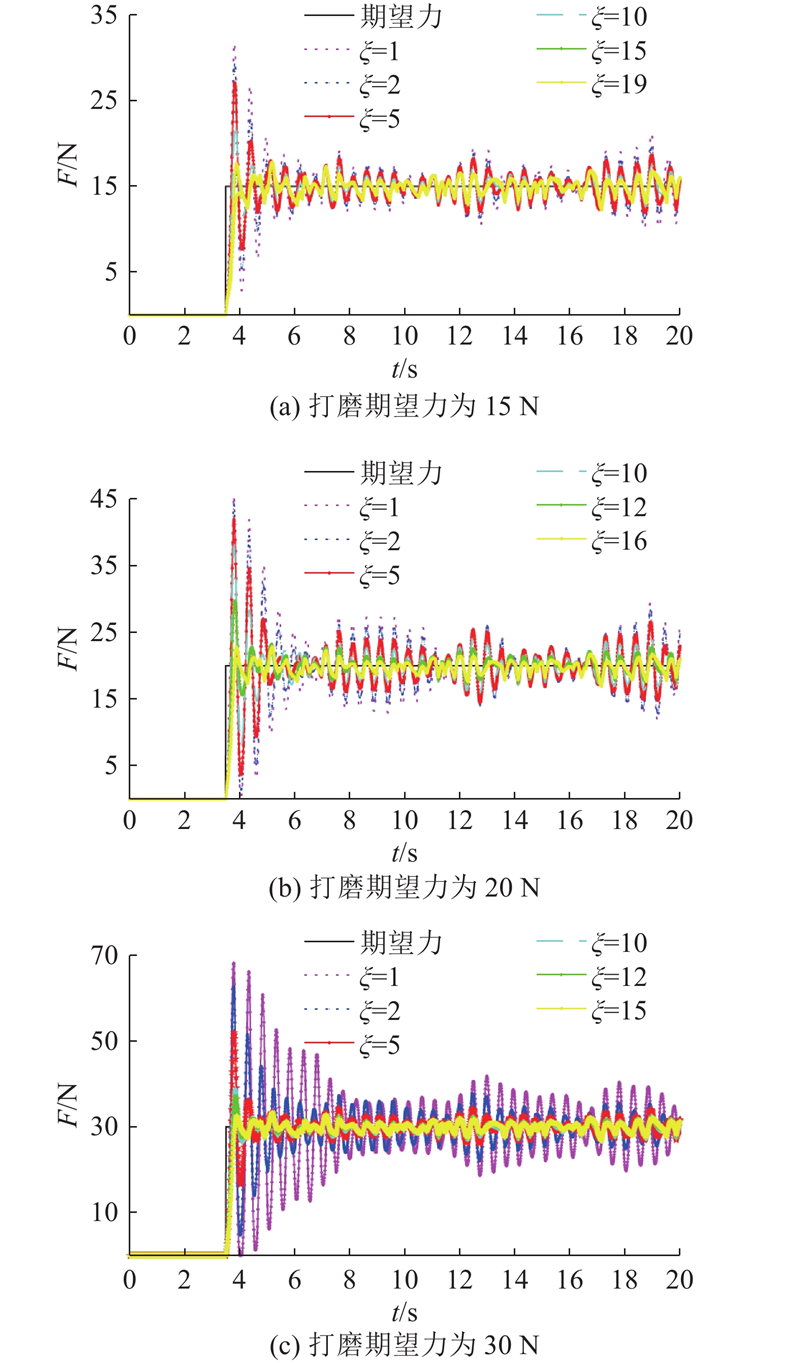
Abstract A compliant floating force-controlled end-effector was designed, in order to resolve the problem of poor adaptability of industrial robots for the compliant grinding of workpieces. A robotic grinding force control method with the active adaptive variable impedance was proposed, using the reinforcement-learning based on the ensemble Bayesian neural networks model. According to the contact environment information of the robotic grinding, the multiple sampling samples from the small amount of data were obtained by the Bootstrapping method, and the ensemble Bayesian neural network model was trained to characterize the interactions between the robotic grinding system and the grinding condition environment. The optimal impedance parameters were solved by the covariance matrix adaptation evolution strategy (CMA-ES). A virtual prototype platform of the robotic grinding system was constructed. A robotic grinding simulation experiment of a blade workpiece was conducted, and the effectiveness of the proposed method was verified. Experimental results show that the proposed method reduces the absolute tracking error of the grinding force to a small value after a dozen training, realizes the active adaptive variable impedance for the grinding force control of the robotic grinding system, and improves the flexibility and the robustness of the robotic grinding force control.
|
|
Received: 14 March 2023
Published: 27 December 2023
|
|
|
| Fund: 国家自然科学基金资助项目(52275005);中央高校基本科研业务费专项资金资助项目(300102253201);安徽省博士后研究人员科研活动经费资助项目(2023B675);中国博士后科学基金资助项目(2022M722435);哈尔滨工业大学机器人技术与系统国家重点实验室开放研究项目(SKLRS-2020-KF-08);安徽省教育厅科学研究重点项目(KJ2020A0364);高校优秀青年人才支持计划项目(2019YQQ023) |
基于集成概率模型的变阻抗机器人打磨力控制
工业机器人对工件柔顺打磨作业的适应性差,为此设计机器人柔顺浮动力控末端执行器,基于集成贝叶斯神经网络模型的强化学习,提出主动自适应变阻抗的机器人打磨力控制方法. 所提方法根据打磨作业的接触环境信息,利用自助法获取小量数据的多次采样样本,训练集成贝叶斯神经网络模型以描述机器人打磨系统与工况环境交互作用,采用协方差矩阵自适应进化策略(CMA-ES)求解最优阻抗参数. 构建机器人打磨系统虚拟样机平台,开展叶片工件的打磨仿真实验,验证所提方法的有效性. 实验结果表明,所提方法在十几次训练后,能够将打磨力的绝对跟踪误差减小至较小值,较好地实现了机器人打磨系统的主动自适应变阻抗打磨力控制,提高了机器人打磨力控制的柔顺性和鲁棒性.
关键词:
工业机器人,
打磨力控制,
自适应变阻抗,
强化学习,
集成贝叶斯神经网络
|
|
| [1] |
ZHU D, FENG X, XU X, et al Robotic grinding of complex components: a step towards efficient and intelligent machining–challenges, solutions, and applications[J]. Robotics and Computer-Integrated Manufacturing, 2020, 65: 101908
doi: 10.1016/j.rcim.2019.101908
|
|
|
| [2] |
黄云, 肖贵坚, 邹莱 航空发动机叶片机器人精密砂带磨削研究现状及发展趋势[J]. 航空学报, 2019, 40 (3): 022508
HUANG Yun, XIAO Gui-jian, ZOU Lai Current situation and development trend of robot precise belt grinding for aero-engine blade[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40 (3): 022508
|
|
|
| [3] |
LIU L, ULRICH B J, ELBESTAWI M A. Robotic grinding force regulation: design, implementation and benefits [C]// IEEE International Conference on Robotics and Automation. Cincinnati: IEEE, 1990: 258-265.
|
|
|
| [4] |
WANG Q, WANG W, ZHENG L, et al Force control-based vibration suppression in robotic grinding of large thin-wall shells[J]. Robotics and Computer-Integrated Manufacturing, 2021, 67: 102031
doi: 10.1016/j.rcim.2020.102031
|
|
|
| [5] |
LI D, YANG J, ZHAO H, et al Contact force plan and control of robotic grinding towards ensuring contour accuracy of curved surfaces[J]. International Journal of Mechanical Sciences, 2022, 227: 107449
doi: 10.1016/j.ijmecsci.2022.107449
|
|
|
| [6] |
ZHANG T, XIAO M, ZOU Y B, et al Robotic curved surface tracking with a neural network for angle identification and constant force control based on reinforcement learning[J]. International Journal of Precision Engineering and Manufacturing, 2020, 21: 869- 882
doi: 10.1007/s12541-020-00315-x
|
|
|
| [7] |
甘亚辉, 段晋军, 戴先中 非结构环境下的机器人自适应变阻抗力跟踪控制方法[J]. 控制与决策, 2019, 34 (10): 2134- 2142
GAN Ya-hui, DUAN Jin-jun, DAI Xian-zhong Adaptive variable impedance control for robot force tracking in unstructured environment[J]. Control and Decision, 2019, 34 (10): 2134- 2142
|
|
|
| [8] |
李超, 张智, 夏桂华, 等 基于强化学习的学习变阻抗控制[J]. 哈尔滨工程大学学报, 2019, 40 (2): 304- 311
LI Chao, ZHANG Zhi, XIA Gui-hua, et al Learning variable impedance control based on reinforcement learning[J]. Journal of Harbin Engineering University, 2019, 40 (2): 304- 311
|
|
|
| [9] |
ZHOU H, MA S, WANG G, et al A hybrid control strategy for grinding and polishing robot based on adaptive impedance control[J]. Advances in Mechanical Engineering, 2021, 13 (3): 1- 21
|
|
|
| [10] |
SHEN Y, LU Y, ZHUANG C A fuzzy-based impedance control for force tracking in unknown environment[J]. Journal of Mechanical Science and Technology, 2022, 36: 5231- 5242
doi: 10.1007/s12206-022-0936-6
|
|
|
| [11] |
ZHONG Y, WANG T, PU Y, et al An adaptive bilateral impedance control based on nonlinear disturbance observer for different flexible targets grasping[J]. Computers and Electrical Engineering, 2022, 103: 108388
doi: 10.1016/j.compeleceng.2022.108388
|
|
|
| [12] |
WU X, HUANG Z, WAN Y, et al A novel force-controlled spherical polishing tool combined with self-rotation and co-rotation motion[J]. IEEE Access, 2020, 8: 108191- 108200
doi: 10.1109/ACCESS.2020.2997968
|
|
|
| [13] |
MOHAMMAD A E K, HONG J, WANG D, et al Synergistic integrated design of an electrochemical mechanical polishing end-effector for robotic polishing applications[J]. Robotics and Computer-Integrated Manufacturing, 2019, 55: 65- 75
doi: 10.1016/j.rcim.2018.07.005
|
|
|
| [14] |
郭万金, 赵伍端, 于苏扬, 等 无先验模型曲面的机器人打磨主动自适应在线轨迹预测方法[J]. 浙江大学学报: 工学版, 2023, 57 (8): 1655- 1666
GUO Wan-jin, ZHAO Wu-duan, YU Su-yang, et al Active adaptive online trajectory prediction for robotic grinding on surface without prior model[J]. Journal of Zhejiang University: Engineering Science, 2023, 57 (8): 1655- 1666
|
|
|
| [15] |
HOGAN N. Impedance control: an approach to manipulation [C]// 1984 American Control Conference. San Diego: IEEE, 1984: 304-313.
|
|
|
| [16] |
OTT C, MUKHERJEE R, NAKAMURA Y. Unified impedance and admittance control [C]// 2010 IEEE International Conference on Robotics and Automation. Anchorage: IEEE, 2010: 554-561.
|
|
|
| [17] |
肖蒙. 机器人打磨加工过程中恒力控制方法研究[D]. 广州: 华南理工大学, 2020.
XIAO Meng. Research on constant force control methods in robot grinding process [D]. Guangzhou: South China University of Technology, 2020.
|
|
|
| [18] |
DEISENROTH M P, RASMUSSEN C E. PILCO: a model-based and data-efficient approach to policy search [C]// 28th International Conference on Machine Learning. Washington: Omnipress, 2011: 465-472.
|
|
|
| [19] |
张铁, 肖蒙, 邹焱飚, 等 基于强化学习的机器人曲面恒力跟踪研究[J]. 浙江大学学报: 工学版, 2019, 53 (10): 1865- 1873
ZHANG Tie, XIAO Meng, ZOU Yan-biao, et al Research on robot constant force control of surface tracking based on reinforcement learning[J]. Journal of Zhejiang University: Engineering Science, 2019, 53 (10): 1865- 1873
|
|
|
| [20] |
KINGMA D P, SALIMANS T, WELLING M. Variational dropout and the local reparameterization trick [EB/OL]. (2015-12-20)[2023-03-12]. https://arxiv.org/pdf/1506.02557.pdf.
|
|
|
| [21] |
JOSPIN L V, LAGA H, BOUSSAID F, et al Hands-on bayesian neural networks: a tutorial for deep learning users[J]. IEEE Computational Intelligence Magazine, 2022, 17 (2): 29- 48
doi: 10.1109/MCI.2022.3155327
|
|
|
| [22] |
KINGMA D P, WELLING M. Auto-encoding variational bayes [EB/OL]. (2022-12-11)[2023-03-12]. https://arxiv.org/pdf/1312.6114.pdf.
|
|
|
| [23] |
CHUA K, CALANDRA R, MCALLISTER R, et al. Deep reinforcement learning in a handful of trials using probabilistic dynamics models [EB/OL]. (2018-11-02)[2023-03-12]. https://arxiv.org/pdf/1805.12114.pdf.
|
|
|
| [24] |
QUIRYNEN R, VUKOV M, ZANON M, et al Autogenerating microsecond solvers for nonlinear MPC: a tutorial using ACADO integrators[J]. Optimal Control Applications and Methods, 2015, 36 (5): 685- 704
doi: 10.1002/oca.2152
|
|
|
| [25] |
HANSEN N. The CMA evolution strategy: a comparing review [M]// LOZANO J A, LARRAÑAGA P, INZA I, et al. Towards a new evolutionary computation. Berlin: Springer, 2006, 192: 75-102.
|
|
|
| [26] |
普亚松, 史耀耀, 蔺小军, 等 基于对数四元数的工业机器人Hermite样条曲线姿态插值[J]. 西北工业大学学报, 2019, 37 (6): 1165- 1173
PU Ya-song, SHI Yao-yao, LIN Xiao-jun, et al Interpolating industrial robot orientation with Hermite spline curve based on logarithmic quaternion[J]. Journal of Northwestern Polytechnical University, 2019, 37 (6): 1165- 1173
doi: 10.1051/jnwpu/20193761165
|
|
|
| [27] |
郭万金, 于苏扬, 赵伍端, 等 机器人主动柔顺恒力打磨控制方法[J]. 东北大学学报: 自然科学版, 2023, 44 (1): 89- 99
GUO Wan-jin, YU Su-yang, ZHAO Wu-duan, et al Grinding control method of robotic active compliance constant-force[J]. Journal of Northeastern University: Natural Science, 2023, 44 (1): 89- 99
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|