|
|
|
| Explicit-time adaptive tracking control for aerial manipulator systems |
Yicheng LIU( ),Xiang MA,Wen YAN ),Xiang MA,Wen YAN |
| College of Electrical Engineering, Sichuan University, Chengdu 610065, China |
|
|
|
Abstract A novel explicit-time adaptive control (ETAC) method was proposed to address the challenge of achieving fixed-time stable control with minimal control input in aerial manipulator systems which are susceptible to environmental disturbances during operation due to the complex physical structure. This method enabled rapid system error convergence within an explicit time frame even in the presence of unknown disturbances. The Newton-Euler method was utilized to establish the dynamic model of the aerial manipulator, and an adaptive neural network approximation strategy was designed to estimate disturbances without relying on prior knowledge. An explicit-time stability strategy was incorporated to ensure control convergence, accelerating system convergence while mitigating the problem of controller saturation caused by excessive control input. The results of numerical simulation and flight experiments indicated that, compared to the predefined-time control method, the proposed method reduced the control input by 30.51%, shortened the system error convergence time by 8.36%, and decreased the system error by 31.25% under manipulator disturbances. This method significantly enhances the system’s disturbance rejection capability while maintaining a lower control input.
|
|
Received: 31 October 2024
Published: 25 August 2025
|
|
|
| Fund: 四川省智能制造与机器人重大科技专项资助项目 (2019ZDZX0019). |
空中作业机器人系统显式时间自适应跟踪控制
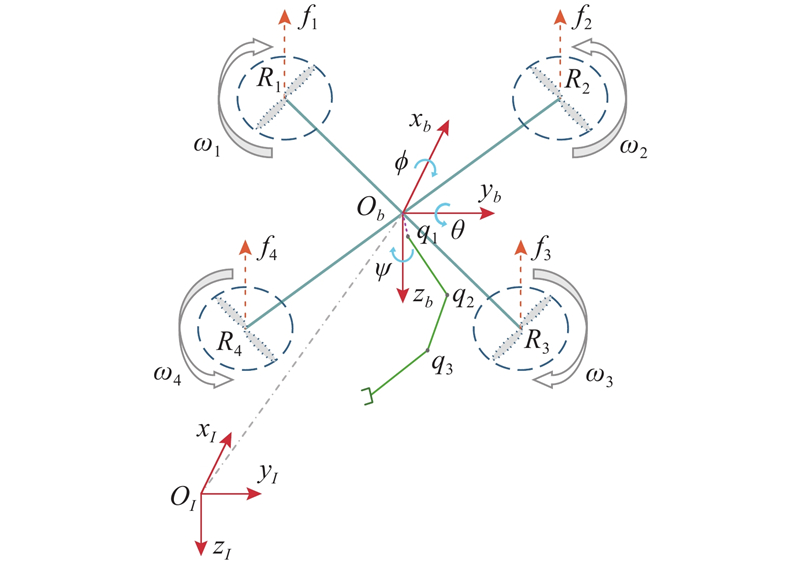
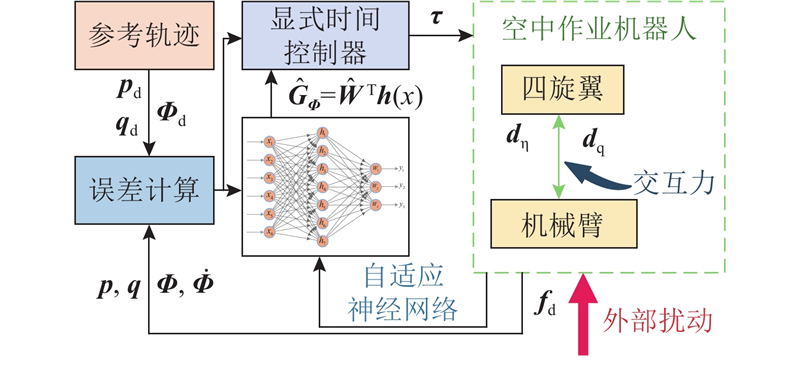
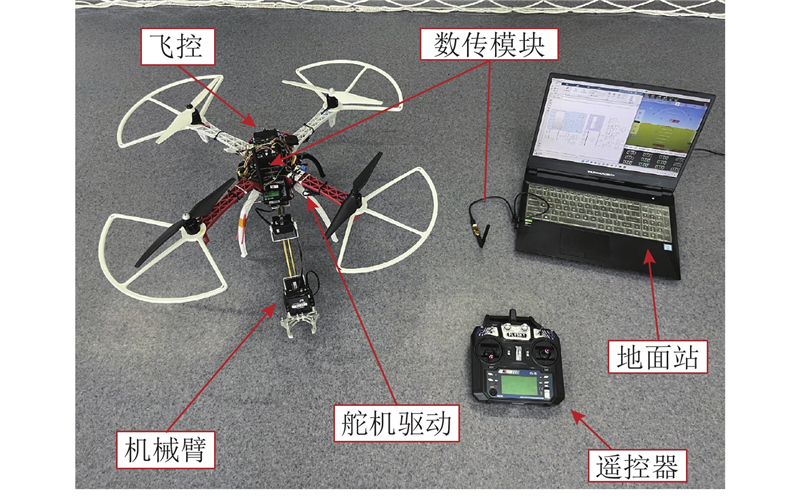
空中作业机器人系统的复杂物理结构使其在运行过程中易受复杂环境扰动影响,难以实现在较小控制输入下的固定时间稳定控制. 提出一种新型的显式时间自适应控制(ETAC)方法,在未知扰动存在时,使系统误差在显式时间内快速收敛. 利用牛顿-欧拉法建立空中作业机器人的动力学模型,设计自适应神经网络逼近策略,无须依赖先验知识即可估计扰动;结合显式时间稳定策略以确保控制收敛性,加快系统收敛速度,并有效缓解控制输入过大导致的控制器饱和问题. 数值仿真和飞行实验结果表明,与预定义时间控制方法相比,所提方法的控制输入减少了30.51%,系统误差收敛时间缩短了8.36%;在机械臂受到扰动的情况下,系统误差降低了31.25%. 该方法在保持较小控制输入的同时,显著增强了系统的抗扰动能力.
关键词:
空中作业机器人,
轨迹跟踪,
显式时间稳定策略,
扰动估计,
自适应神经网络
|
|
| [1] |
KHALID A, MUSHTAQ Z, ARIF S, et al. Control schemes for quadrotor UAV: taxonomy and survey[J]. ACM Computing Surveys, 2023, 56 (5): 1- 32
|
|
|
| [2] |
HUA H, FANG Y, ZHANG X, et al A novel robust observer-based nonlinear trajectory tracking control strategy for quadrotors[J]. IEEE Transactions on Control Systems Technology, 2021, 29 (5): 1952- 1963
|
|
|
| [3] |
ZEGHLACHE S, RAHALI H, DJERIOUI A, et al Robust adaptive backstepping neural networks fault tolerant control for mobile manipulator UAV with multiple uncertainties[J]. Mathematics and Computers in Simulation, 2024, 218: 556- 585
|
|
|
| [4] |
CAO H, WU Y, WANG L Adaptive NN motion control and predictive coordinate planning for aerial manipulators[J]. Aerospace Science and Technology, 2022, 126: 107607
|
|
|
| [5] |
YAO Y, DING L, WANG Y Fractional-order nonsingular terminal sliding mode control of a cable-driven aerial manipulator based on RBF neural network[J]. International Journal of Aeronautical and Space Sciences, 2024, 25 (2): 759- 771
|
|
|
| [6] |
FANG Q, MAO P, SHEN L, et al Robust control based on adaptive neural network for the process of steady formation of continuous contact force in unmanned aerial manipulator[J]. Sensors, 2023, 23 (2): 989
|
|
|
| [7] |
刘宜成, 贺嘉辣, 严文 旋翼飞行机械臂固定时间滑模控制[J]. 电光与控制, 2024, 31 (1): 69- 76
LIU Yicheng, HE Jiala, YAN Wen Fixed-time sliding mode control of rotor flight manipulator[J]. Electronics Optics and Control, 2024, 31 (1): 69- 76
doi: 10.3969/j.issn.1671-637X.2024.01.011
|
|
|
| [8] |
刘浩, 黄山, 涂海燕 基于预定义时间的四旋翼滑模控制[J]. 北京航空航天大学学报, 2024, 50 (5): 1665- 1674
LIU Hao, HUANG Shan, TU Haiyan Quadrotor sliding mode control based on predefined time[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50 (5): 1665- 1674
|
|
|
| [9] |
YAN W, ZHAO T, GONG X An explicit-time and explicit-accuracy control for a state-constrained nonstrict-feedback uncertain system based on adaptive fuzzy dynamic-approximation[J]. Journal of the Franklin Institute, 2023, 360 (9): 6425- 6462
|
|
|
| [10] |
LI H, LI Z, LIU J, et al Adaptive neural network backstepping control method for aerial manipulator based on coupling disturbance compensation[J]. Journal of the Franklin Institute, 2024, 361 (7): 106733
|
|
|
| [11] |
LIANG J, CHEN Y, LAI N, et al Low-complexity prescribed performance control for unmanned aerial manipulator robot system under model uncertainty and unknown disturbances[J]. IEEE Transactions on Industrial Informatics, 2022, 18 (7): 4632- 4641
|
|
|
| [12] |
ZHAO K, ZHANG J, MA D, et al Composite disturbance rejection attitude control for quadrotor with unknown disturbance[J]. IEEE Transactions on Industrial Electronics, 2020, 67 (8): 6894- 6903
|
|
|
| [13] |
JIANG H, MA Q, GUO J Fuzzy-based fixed-time attitude control of quadrotor unmanned aerial vehicle with full-state constraints: theory and experiments[J]. IEEE Transactions on Fuzzy Systems, 2024, 32 (3): 1108- 1115
|
|
|
| [14] |
LIU K, HUNG T, LIN C, et al Redundancy-driven multi-task adaptive backstepping tracking control for aerial manipulators[J]. IEEE Access, 2024, 12: 47134- 47145
|
|
|
| [15] |
YOGI S C, TRIPATHI V K, BEHERA L Adaptive integral sliding mode control using fully connected recurrent neural network for position and attitude control of quadrotor[J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32 (12): 5595- 5609
|
|
|
| [16] |
LIU Y C, HUANG C Y DDPG-based adaptive robust tracking control for aerial manipulators with decoupling approach[J]. IEEE Transactions on Cybernetics, 2022, 52 (8): 8258- 8271
|
|
|
| [17] |
YANG Y, GORBACHEV S, ZHAO B, et al Predictor-based neural attitude control of a quadrotor with disturbances[J]. IEEE Transactions on Industrial Informatics, 2024, 20 (1): 169- 178
|
|
|
| [18] |
YAN W, ZHAO T, YANG H, et al 1-order-smooth explicit-time nonsingular terminal sliding mode control of industrial cyber-physical systems against cyber-attacks[J]. IEEE Transactions on Industrial Cyber-Physical Systems, 2023, 1: 371- 380
|
|
|
| [19] |
MAHMOOD A, UR REHMAN F, OKASHA M, et al Neural adaptive sliding mode control for camera positioner quadrotor UAV[J]. International Journal of Aeronautical and Space Sciences, 2025, 26 (2): 733- 747
|
|
|
| [20] |
ZHU Z, XIA Y, FU M Adaptive sliding mode control for attitude stabilization with actuator saturation[J]. IEEE Transactions on Industrial Electronics, 2011, 58 (10): 4898- 4907
|
|
|
| [21] |
LIAN S, MENG W, LIN Z, et al Adaptive attitude control of a quadrotor using fast nonsingular terminal sliding mode[J]. IEEE Transactions on Industrial Electronics, 2022, 69 (2): 1597- 1607
|
|
|
| [22] |
TONG S, LI Y, LIU Y Observer-based adaptive neural networks control for large-scale interconnected systems with nonconstant control gains[J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32 (4): 1575- 1585
|
|
|
| [23] |
DAI X, KE C, QUAN Q, et al RFlySim: automatic test platform for UAV autopilot systems with FPGA-based hardware-in-the-loop simulations[J]. Aerospace Science and Technology, 2021, 114: 106727
|
|
|
| [24] |
YU L, HE G, WANG X, et al A novel fixed-time sliding mode control of quadrotor with experiments and comparisons[J]. IEEE Control Systems Letters, 2021, 6: 770- 775
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|