| 机械工程 |
|

|
|
|
| 水下机械手研究进展 |
肖华平( ),李翰林,刘书海 ),李翰林,刘书海 |
| 中国石油大学(北京) 机械与储运工程学院,北京 102249 |
|
| Review of underwater manipulators |
| Huaping XIAO(),hanlin LI,Shuhai LIU |
| College of Mechanical and Transportation Engineering, China University of Petroleum, Beijing 102249, China |
| 1 |
MORAN M E Evolution of robotic arms[J]. Journal of Robotic Surgery, 2007, 1 (2): 103- 111
doi: 10.1007/s11701-006-0002-x
|
| 2 |
WANG F, LIU H, CAO L, et al. A novel lightweight underwater manipulator based on ROS2 for reliable intervention [C]// Proceedings of the 9th International Conference on Automation, Control and Robotics Engineering. Jeju Island: IEEE, 2024: 345–349.
|
| 3 |
ANTONELLI G. Underwater robots: 2nd edition [M]. Cham: Springer, 2006: 1–7.
|
| 4 |
JONES D O B Using existing industrial remotely operated vehicles for deep-sea science[J]. Zoologica Scripta, 2009, 38 (s1): 41- 47
doi: 10.1111/j.1463-6409.2007.00315.x
|
| 5 |
HOTTA S, MITSUI Y, SUKA M, et al Lightweight underwater robot developed for archaeological surveys and excavations[J]. ROBOMECH Journal, 2023, 10 (1): 2
doi: 10.1186/s40648-023-00240-4
|
| 6 |
SIVČEV S, COLEMAN J, OMERDIĆ E, et al Underwater manipulators: a review[J]. Ocean Engineering, 2018, 163: 431- 450
doi: 10.1016/j.oceaneng.2018.06.018
|
| 7 |
KOŁODZIEJCZYK W Some considerations on an underwater robotic manipulator subjected to the environmental disturbances caused by water current[J]. Acta Mechanica et Automatica, 2016, 10 (1): 43- 49
doi: 10.1515/ama-2016-0008
|
| 8 |
ZHONG Y, YANG F Dynamic modeling and adaptive fuzzy sliding mode control for multi-link underwater manipulators[J]. Ocean Engineering, 2019, 187: 106202
doi: 10.1016/j.oceaneng.2019.106202
|
| 9 |
ANDERSON V C. MPL experimental RUM [R]. La Jolla: Scripps Institution of Oceanography, 1960: SIO Reference 60-26.
|
| 10 |
纪辉, 兰宇, 武子为, 等 面向水下作业的水液压机械手研究与展望[J]. 机械工程学报, 2023, 59 (4): 283- 294
JI Hui, LAN Yu, WU Ziwei, et al Research progress and prospect of water hydraulic manipulator for underwater operation[J]. Journal of Mechanical Engineering, 2023, 59 (4): 283- 294
doi: 10.3901/JME.2023.04.283
|
| 11 |
WANG Z, CUI W For safe and compliant interaction: an outlook of soft underwater manipulators[J]. Proceedings of the Institution of Mechanical Engineers, Part M: Journal of Engineering for the Maritime Environment, 2021, 235 (1): 3- 14
doi: 10.1177/1475090220950911
|
| 12 |
Woods Hole Oceanographic Institution. History of Alvin [EB/OL]. [2024-07-15]. https://www.whoi.edu/what-we-do/explore/underwater-vehicles/hov-alvin/history-of-alvin/.
|
| 13 |
顾云冠, 曹智裕, 王道炎, 等. 系缆无人遥控潜水器HR01[J]. 海洋工程, 1987, 5(4): 1–7.
GU Yunguan, CAO Zhiyu, WANG Daoyan, et al. Tethered remotely operated vehicle HR01 [J]. The Ocean Engineering, 1987, 5(4): 1–7.
|
| 14 |
Schilling Robotics. Manipulator systems [EB/OL]. [2024-07-15]. https://www.technipfmc.com/en/what-we-do/subsea/robotics/manipulator-systems/.
|
| 15 |
Kratf TeleRobotics. Products [EB/OL]. [2024-07-15]. http://krafttelerobotics.cn/products/index.html.
|
| 16 |
Hydro-Lek. Manipulators [EB/OL]. [2024-07-15]. http://www.hydro-lek.com/manipulators.php.
|
| 17 |
Forum Energy Technologies. ROV tooling and components [EB/OL]. [2024-07-15]. https://f-e-t.com/subsea/rov-tooling-and-components/.
|
| 18 |
KNR Systems Inc. HYDRA-UW [EB/OL]. [2024-07-15]. http://rnd.knrsys.com/english/view.html?id_no=25&id_no1=5.
|
| 19 |
Oceaneering. Atlas hybrid manipulator [EB/OL]. [2024-07-15]. https://www.oceaneering.com/brochures/atlas-hybrid-manipulator/.
|
| 20 |
Seamor Marine Ltd. Hydraulic articulating robotic manipulator [EB/OL]. [2024-07-15]. https://www.environmental-expert.com/products/seamor-model-7f-h-arm-hydraulic-articulating-robotic-manipulator-281530.
|
| 21 |
Envirex. Hydraulic light-weight manipulator series [EB/OL]. [2024-07-15]. https://envirex.no/titanrob/.
|
| 22 |
ISE. Magnum subsea manipulators with integrated telemetry [EB/OL]. [2024-07-15]. http://207.102.77.253/manips.html.
|
| 23 |
杨喜荣. 深海水下作业型机械手控制系统研究[D]. 杭州: 浙江大学, 2006.
YANG Xirong. Research on control system of deep-sea underwater manipulator [D]. Hangzhou: Zhejiang University, 2006.
|
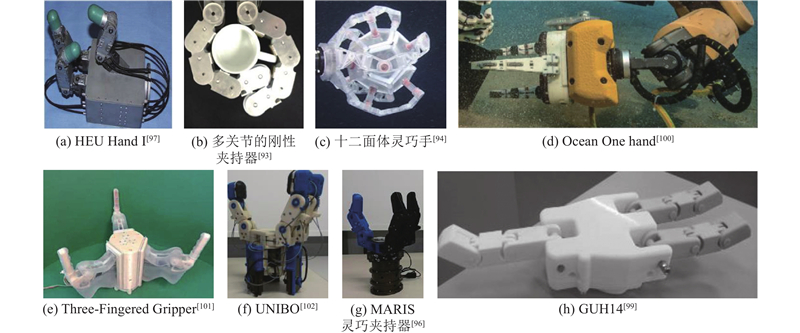
| 24 |
中国科学院沈阳自动化研究所. 7000米深海作业机械手[EB/OL]. (2015-10-23) [2024-07-20]. http://www.sia.cas.cn/kxcb/kpwz/201510/t20151023_4444028.html.
|
| 25 |
申雄. 模拟深水环境下双机械手协调作业关键技术研究[D]. 武汉: 华中科技大学, 2013.
SHEN Xiong. Study on key technologies for coordinated manipulation for dual manipulators in simulated deepwater environment [D]. Wuhan: Huazhong University of Science and Technology, 2013.
|
| 26 |
罗高生. 深海七功能主从液压机械手及其非线性鲁棒控制方法研究[D]. 杭州: 浙江大学, 2013.
LUO Gaosheng. Research on subsea 7 function master-slave hydraulic manipulator and its nonlinear robust control [D]. Hangzhou: Zhejiang University, 2013.
|
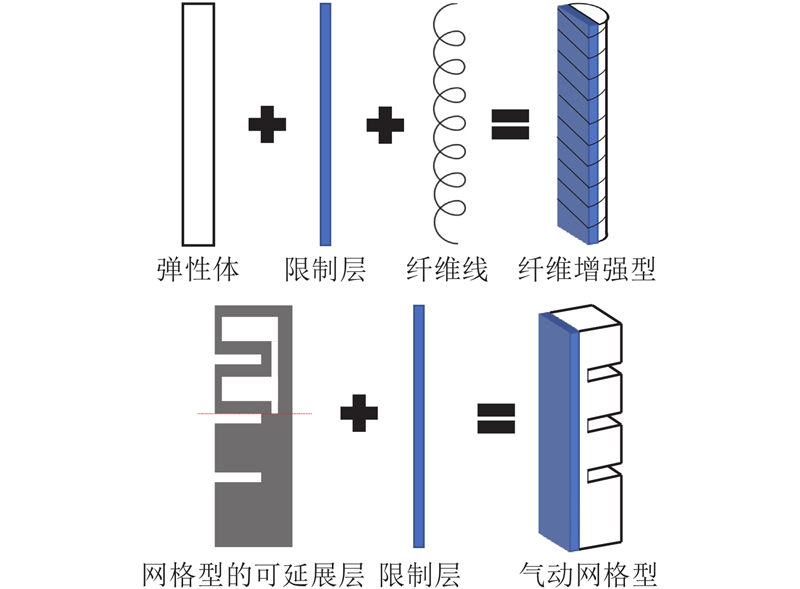
| 27 |
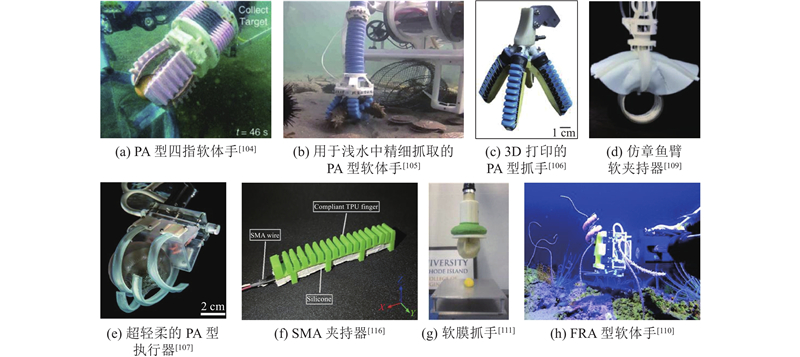
向忠祥, 茅及愚 “鱼鹰”号载人潜器打捞机械手的研制[J]. 海洋技术, 1990, 9 (1): 12- 17
XIANG Zhongxiang, MAO Jiyu Manipulator development for manned underwater salvage vehicle “the cormorant”[J]. Ocean Technology, 1990, 9 (1): 12- 17
|
| 28 |
茅及愚, 张向明, 徐国华, 等 兰鲸号潜器两型机械手的结构设计研究[J]. 海洋工程, 1998, 16 (1): 81- 88
MAO Jiyu, ZHANG Xiangming, XU Guohua, et al The structure design and study of two manipulators on blue whale underwater vehicle[J]. The Ocean Engineering, 1998, 16 (1): 81- 88
|
| 29 |
王千年. 深海液压机械臂的设计与分析[D]. 合肥: 中国科学技术大学, 2021: 6.
WANG Qiannian. Design and analysis of deep sea hydraulic manipulator [D]. Hefei: University of Science and Technology of China, 2021: 6.
|
| 30 |
孟庆鑫, 叶华武, 王晓东 SIWR-Ⅱ水下作业机械手动力机构特性分析[J]. 哈尔滨船舶工程学院学报, 1993, 14 (1): 60- 65
MENG Qingxin, YE Huawu, WANG Xiaodong Analyzing the characteristics of the motive mechanism of SIWR-Ⅱ manipulator under the water[J]. Journal of Harbin Shipbuilding Engineering Institute, 1993, 14 (1): 60- 65
|
| 31 |
YOERGER D R, SCHEMPF H, DIPIETRO D M Design and performance evaluation of an actively compliant underwater manipulator for full-ocean depth[J]. Journal of Robotic Systems, 1991, 8 (3): 371- 392
doi: 10.1002/rob.4620080306
|
| 32 |
王承禧, 徐国华, 黄群, 等 自主式水下机械手系统研究[J]. 海洋工程, 1996, 14 (3): 28- 36
WANG Chengxi, XU Guohua, HUANG Qun, et al The research on autonomous underwater manipulator system[J]. The Ocean Engineering, 1996, 14 (3): 28- 36
|
| 33 |
LANE D M, DAVIES J B C, CASALINO G, et al AMADEUS: advanced manipulation for deep underwater sampling[J]. IEEE Robotics & Automation Magazine, 1997, 4 (4): 34- 45
|
| 34 |
YUH J, CHOI S K, IKEHARA C, et al. Design of a semi-autonomous underwater vehicle for intervention missions (SAUVIM) [C]// Proceedings of 1998 International Symposium on Underwater Technology. Tokyo: IEEE, 1998: 63–68.
|
| 35 |
RIBAS D, RIDAO P, TURETTA A, et al I-AUV mechatronics integration for the TRIDENT FP7 project[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20 (5): 2583- 2592
doi: 10.1109/TMECH.2015.2395413
|
| 36 |
FERNÁNDEZ J J, PRATS M, SANZ P J, et al Grasping for the seabed: developing a new underwater robot arm for shallow-water intervention[J]. IEEE Robotics & Automation Magazine, 2013, 20 (4): 121- 130
|
| 37 |
张奇峰, 张艾群 基于能源消耗最小的自治水下机器人—机械手系统协调运动研究[J]. 机器人, 2006, 28 (4): 444- 447
ZHANG Qifeng, ZHANG Aiqun Coordinated motion of an autonomous underwater vehicle-manipulator system based on energy consumption minimization[J]. Robot, 2006, 28 (4): 444- 447
|
| 38 |
XIAO Z, XU G, PENG F, et al Development of a deep ocean electric autonomous manipulator[J]. China Ocean Engineering, 2011, 25 (1): 159- 168
doi: 10.1007/s13344-011-0014-9
|
| 39 |
HU X, CHEN J, ZHOU H, et al Development of underwater electric manipulator based on interventional autonomous underwater vehicle (AUV)[J]. Journal of Zhejiang University: Science A, 2024, 25 (3): 238- 250
doi: 10.1631/jzus.A2200621
|
| 40 |
南京华研. 水下电动机械臂 [EB/OL]. [2024-07-21]. https://www.huayanseal.com/?list_8/.
|
| 41 |
Graal Tech. UMA-1500-Manipulator [EB/OL]. [2024-07-20]. https://www.graaltech.com/products/uma-1500/.
|
| 42 |
SMITH J S, YU R, SARAFIS I, et al. Computer vision control of an underwater manipulator [C]// Proceedings of OCEANS'94. Brest: IEEE, 1994: I/187–I/192.
|
| 43 |
LEWANDOWSKI C, AKIN D, DILLOW B, et al. Development of a deep-sea robotic manipulator for autonomous sampling and retrieval [C]// Proceedings of the IEEE/OES Autonomous Underwater Vehicles. Woods Hole: IEEE, 2008: 1–6.
|
| 44 |
TERRIBILE A, PRENDIN W, LANZA R. An innovative electromechanical underwater telemanipulator-present status and future development [C]// Proceedings of OCEANS'94. Brest: IEEE, 2002: II/188–II/191.
|
| 45 |
Ocean Innovation System. STR OIS STR 5 function electric manipulator arm [EB/OL]. [2024-07-20]. https://www.str-subsea.com/products/rov-tools/manipulators-boom-arms/str-ois-str-5-function-electric-manipulator-arm.
|
| 46 |
Reach Robotics. ROV arms for harsh environments [EB/OL]. [2024-07-20]. https://reachrobotics.com/products/manipulators/.
|
| 47 |
ECA. Subsea electrical manipulator arms [EB/OL]. [2024-07-20]. https://www.ecagroup.com/en/solutions/subsea-electrical-manipulator-arms.
|
| 48 |
张建华. 深海模拟环境中液压水下机械手的仿真研究[D]. 武汉: 华中科技大学, 2012.
ZHANG Jianhua. Research and simulation of hydraulic underwater manipulator in the simulated environment of deep sea [D]. Wuhan: Huazhong University of Science and Technology, 2012.
|
| 49 |
安江波. 大时延水下机械手位置伺服控制技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2008.
AN Jiangbo. Research on position servo control of underwater manipulator with time delay [D]. Harbin: Harbin Engineering University, 2008.
|
| 50 |
PURUSHOTHAM A Kane’s method for robotic arm dynamics: a novel approach[J]. IOSR Journal of Mechanical and Civil Engineering, 2013, 6 (4): 7- 13
doi: 10.9790/1684-640713
|
| 51 |
裴香丽, 田颖, 张明路 水下机械手水动力学分析及控制方法研究[J]. 船舶力学, 2022, 26 (5): 679- 690
PEI Xiangli, TIAN Ying, ZHANG Minglu Research on hydrodynamic analysis and control method of underwater manipulators[J]. Journal of Ship Mechanics, 2022, 26 (5): 679- 690
|
| 52 |
MORISON J R, JOHNSON J W, SCHAAF S A The force exerted by surface waves on piles[J]. Journal of Petroleum Technology, 1950, 2 (5): 149- 154
doi: 10.2118/950149-G
|
| 53 |
王华, 孟庆鑫, 王立权 基于切片理论的水下灵巧手手指动力学分析[J]. 机器人, 2007, 29 (2): 160- 166
WANG Hua, MENG Qingxin, WANG Liquan Analysis on finger dynamics of dexterous underwater hand based on strip theory[J]. Robot, 2007, 29 (2): 160- 166
|
| 54 |
王懿, 张爱霞, 郭瑞岩, 等 六自由度水下机械臂动力学模型及流阻影响研究[J]. 北京理工大学学报, 2020, 40 (11): 1143- 1149
WANG Yi, ZHANG Aixia, GUO Ruiyan, et al Dynamic model of 6-DOF underwater manipulator and its influence of flow resistance[J]. Transactions of Beijing Institute of Technology, 2020, 40 (11): 1143- 1149
|
| 55 |
高涵, 张明路, 张小俊, 等 水下机械手动力学模型及力矩影响研究[J]. 机械设计与制造, 2017, (3): 68- 71
GAO Han, ZHANG Minglu, ZHANG Xiaojun, et al Research on underwater manipulator dynamics model and torque influence[J]. Machinery Design & Manufacture, 2017, (3): 68- 71
|
| 56 |
ZHAO S, YUH J Experimental study on advanced underwater robot control[J]. IEEE Transactions on Robotics, 2005, 21 (4): 695- 703
doi: 10.1109/TRO.2005.844682
|
| 57 |
肖治琥, 徐国华 流干扰下的水下机械手动力学建模分析[J]. 中国机械工程, 2011, 22 (21): 2521- 2526
XIAO Zhihu, XU Guohua Study on dynamics of underwater manipulator under flow influences[J]. China Mechanical Engineering, 2011, 22 (21): 2521- 2526
|
| 58 |
GE D, WANG G, GE J, et al Trajectory tracking control of two-joint underwater manipulator in ocean-wave environment[J]. Ocean Engineering, 2024, 292: 116329
doi: 10.1016/j.oceaneng.2023.116329
|
| 59 |
刘晓瑜, 田颖, 张明路 水下机械手动力学研究综述[J]. 工程设计学报, 2021, 28 (4): 389- 398
LIU Xiaoyu, TIAN Ying, ZHANG Minglu Review of underwater manipulator dynamics research[J]. Chinese Journal of Engineering Design, 2021, 28 (4): 389- 398
|
| 60 |
KOLODZIEJCZYK W The method of determination of transient hydrodynamic coefficients for a single DOF underwater manipulator[J]. Ocean Engineering, 2018, 153: 122- 131
doi: 10.1016/j.oceaneng.2018.01.090
|
| 61 |
SARPKAYA T Lift, drag, and added-mass coefficients for a circular cylinder immersed in a time-dependent flow[J]. Journal of Applied Mechanics, 1963, 30 (1): 13- 15
doi: 10.1115/1.3630062
|
| 62 |
KOŁODZIEJCZYK W, KOŁODZIEJCZYK M, KUŹMIEROWSKI T, et al Transient hydrodynamic coefficients for a single DOF underwater manipulator of a square cross-section[J]. Ocean Engineering, 2023, 268: 113438
doi: 10.1016/j.oceaneng.2022.113438
|
| 63 |
WANG X, LIU Y, XUE G, et al Transient hydrodynamics coefficients analysis of a six-degree-of-freedom underwater manipulator[J]. Ocean Engineering, 2024, 312: 119156
doi: 10.1016/j.oceaneng.2024.119156
|
| 64 |
刘晓瑜. 基于水动力学的水下机械臂动力学分析及仿真实 验[D].天津: 河北工业大学, 2021.
LIU Xiaoyu. Research on dynamic analysis and simulation test of underwater manipulator based on hydrodynamics [D]. Tianjin: Hebei University of Technology, 2021.
|
| 65 |
王庆云, 韩明勇, 常开应, 等 水下机器人水动力参数CFD计算及操纵性预报[J]. 中国海洋平台, 2023, 38 (1): 50- 56
WANG Qingyun, HAN Mingyong, CHANG Kaiying, et al CFD calculation of underwater vehicle hydrodynamic parameters and maneuverability prediction[J]. China Offshore Platform, 2023, 38 (1): 50- 56
doi: 10.12226/j.issn.1001-4500.2023.01.20230108
|
| 66 |
胡志强, 林扬, 谷海涛 水下机器人粘性类水动力数值计算方法研究[J]. 机器人, 2007, 29 (2): 145- 150
HU Zhiqiang, LIN Yang, GU Haitao On numerical computation of viscous hydrodynamics of unmanned underwater vehicle[J]. Robot, 2007, 29 (2): 145- 150
|
| 67 |
FILARETOV V F, KONOPLIN A J, GETMAN A V Experimental determination of the viscous friction coefficients for calculation of the force impacts on the moving links of the underwater manipulators[J]. Mehatronika, Avtomatizacia, Upravlenie, 2015, 16 (11): 738- 743
doi: 10.17587/mau.16.738-743
|
| 68 |
ZHANG M, LIU X, TIAN Y Modeling analysis and simulation of viscous hydrodynamic model of single-DOF manipulator[J]. Journal of Marine Science and Engineering, 2019, 7 (8): 261
doi: 10.3390/jmse7080261
|
| 69 |
安江波, 张铭钧, 孙昌将 水下机械手控制系统研究[J]. 机械设计与制造, 2009, (5): 185- 187
AN Jiangbo, ZHANG Mingjun, SUN Changjiang Research on control of underwater manipulator[J]. Machinery Design & Manufacture, 2009, (5): 185- 187
|
| 70 |
程尉. 小型水下双臂机械手控制系统研究[D]. 武汉: 华中科技大学, 2020.
CHENG Wei. Research on small underwater dual-arm manipulator control system [D]. Wuhan: Huazhong University of Science and Technology, 2020.
|
| 71 |
YUH J, ZHAO S, LEE P M. Application of adaptive disturbance observer control to an underwater manipulator [C]// IEEE International Conference on Robotics and Automation. Seoul: IEEE, 2001: 3244–3249.
|
| 72 |
SANTHAKUMAR M A nonregressor nonlinear disturbance observer-based adaptive control scheme for an underwater manipulator[J]. Advanced Robotics, 2013, 27 (16): 1273- 1283
doi: 10.1080/01691864.2013.819608
|
| 73 |
XU G, XIAO Z, GUO Y, et al. Trajectory tracking for underwater manipulator using sliding mode control [C]// Proceedings of the IEEE International Conference on Robotics and Biomimetics. Sanya: IEEE, 2007: 2127–2132.
|
| 74 |
VENKATESAN V, MOHAN S, KIM J. Disturbance observer based terminal sliding mode control of an underwater manipulator [C]// Proceedings of the 13th International Conference on Control Automation Robotics & Vision. Singapore: IEEE, 2014: 1566–1572.
|
| 75 |
谭定忠, 张铭钧, 王立权, 等 水下作业液压机械手夹持力模糊控制技术的研究[J]. 机床与液压, 2001, 29 (1): 24- 25
TAN Dingzhong, ZHANG Mingjun, WANG Liquan, et al Research on fuzzy control technology of grasping force in underwater hydraulic manipulator[J]. Machine Tool & Hydraulics, 2001, 29 (1): 24- 25
doi: 10.3969/j.issn.1001-3881.2001.01.010
|
| 76 |
杨犇, 梁喜凤 基于模糊补偿的七自由度机械手轨迹跟踪控制[J]. 机床与液压, 2012, 40 (23): 73- 75
YANG Ben, LIANG Xifeng Track following control of a 7-DOF manipulator based on fuzzy logic compensation[J]. Machine Tool & Hydraulics, 2012, 40 (23): 73- 75
|
| 77 |
LUO W, CONG H. Robust NN control of the manipulator in the underwater vehicle-manipulator system [C]// Advances in Neural Networks. Hokkaido: Springer, 2017: 75–82.
|
| 78 |
SHANG D, LI X, YIN M, et al Rotation tracking control strategy of underwater flexible telescopic manipulator based on neural network compensation for water environment disturbance[J]. Ocean Engineering, 2023, 284: 115245
doi: 10.1016/j.oceaneng.2023.115245
|
| 79 |
王立权, 王春林, 杜维杰, 等 基于Fuzzy-PID的水下作业机械手控制系统设计[J]. 液压与气动, 2005, 29 (1): 27- 31
WANG Liquan, WANG Chunlin, DU Weijie, et al Design of hydraulic control system for an underwater manipulator based on fuzzy-PID[J]. Chinese Hydraulics & Pneumatics, 2005, 29 (1): 27- 31
|
| 80 |
胡雯蔷, 徐筱龙, 徐国华 基于小脑模型关节控制器的水下机械手复合运动控制的研究及仿真[J]. 中国机械工程, 2008, 19 (16): 1891- 1894
HU Wenqiang, XU Xiaolong, XU Guohua Research and simulation on multiplex-athletics control of underwater manipulator based on CMAC[J]. China Mechanical Engineering, 2008, 19 (16): 1891- 1894
|
| 81 |
付雯, 温浩, 黄俊珲, 等 基于非线性动力学模型补偿的水下机械臂自适应滑模控制[J]. 清华大学学报: 自然科学版, 2023, 63 (7): 1068- 1077
FU Wen, WEN Hao, HUANG Junhui, et al Adaptive sliding mode control of underwater manipulator based on nonlinear dynamics model compensation[J]. Journal of Tsinghua University: Science and Technology, 2023, 63 (7): 1068- 1077
|
| 82 |
高阳, 张晓晖, 高玉儿, 等 基于神经网络和模糊补偿的水下机械臂控制[J]. 计算机工程与应用, 2022, 58 (15): 317- 323
GAO Yang, ZHANG Xiaohui, GAO Yu’er, et al Control of underwater manipulator based on neural network and fuzzy compensation[J]. Computer Engineering and Applications, 2022, 58 (15): 317- 323
|
| 83 |
HILDEBRANDT M, KERDELS J, ALBIEZ J, et al. Robust vision-based semi-autonomous underwater manipulation [M]// Intelligent Autonomous Systems 10. Baden: IOS Press, 2008: 308–315.
|
| 84 |
SIVČEV S, ROSSI M, COLEMAN J, et al Fully automatic visual servoing control for work-class marine intervention ROVs[J]. Control Engineering Practice, 2018, 74: 153- 167
doi: 10.1016/j.conengprac.2018.03.005
|
| 85 |
肖治琥. 深水机械手动力学特性及自主作业研究[D]. 武汉: 华中科技大学, 2011.
XIAO Zhihu. Study on dynamic characteristics and autonomous manipulation of underwater manipulator [D]. Wuhan: Huazhong University of Science and Technology, 2011.
|
| 86 |
JUN B H, SHIM H W, LEE P M, et al. Workspace control system of underwater tele-operated manipulators on ROVs [C]// Proceedings of the OCEANS 2009-EUROPE. Bremen: IEEE, 2009: 1–6.
|
| 87 |
CARRERA A, PALOMERAS N, HURTÓS N, et al Cognitive system for autonomous underwater intervention[J]. Pattern Recognition Letters, 2015, 67: 91- 99
doi: 10.1016/j.patrec.2015.06.010
|
| 88 |
LANE D M, MAURELLI F, KORMUSHEV P, et al PANDORA-persistent autonomy through learning, adaptation, observation and replanning[J]. IFAC-PapersOnLine, 2015, 48 (2): 238- 243
doi: 10.1016/j.ifacol.2015.06.039
|
| 89 |
王聪, 张子扬, 陈言壮, 等 基于深度强化学习与多参数域随机化的水下机械手自适应抓取研究[J]. 信息与控制, 2022, 51 (6): 651- 661
WANG Cong, ZHANG Ziyang, CHEN Yanzhuang, et al Deep reinforcement learning and multi-parameter domain randomization based underwater adaptive grasping research for underwater manipulator[J]. Information and Control, 2022, 51 (6): 651- 661
|
| 90 |
HUANG H, JIANG T, ZHANG Z, et al Learning strategies for underwater robot autonomous manipulation control[J]. Journal of the Franklin Institute, 2024, 361 (7): 106773
doi: 10.1016/j.jfranklin.2024.106773
|
| 91 |
YANG X, GAO J, WANG P, et al Digital twin-based stress prediction for autonomous grasping of underwater robots with reinforcement learning[J]. Expert Systems with Applications, 2025, 267: 126164
doi: 10.1016/j.eswa.2024.126164
|
| 92 |
LANE D M, DAVIES J B C, ROBINSON G, et al The AMADEUS dextrous subsea hand: design, modeling, and sensor processing[J]. IEEE Journal of Oceanic Engineering, 1999, 24 (1): 96- 111
doi: 10.1109/48.740158
|
| 93 |
TAKEUCHI K, NOMURA S, TAMAMOTO T, et al. Development of multi-joint gripper for underwater operations [C]// Proceedings of the OCEANS - MTS/IEEE Kobe Techno-Oceans. Kobe: IEEE, 2018: 1–6.
|
| 94 |
TEOH Z E, PHILLIPS B T, BECKER K P, et al Rotary-actuated folding polyhedrons for midwater investigation of delicate marine organisms[J]. Science Robotics, 2018, 3 (20): eaat5276
doi: 10.1126/scirobotics.aat5276
|
| 95 |
KAMPMANN P, KIRCHNER F Towards a fine-manipulation system with tactile feedback for deep-sea environments[J]. Robotics and Autonomous Systems, 2015, 67: 115- 121
doi: 10.1016/j.robot.2014.09.033
|
| 96 |
SIMETTI E, WANDERLINGH F, TORELLI S, et al Autonomous underwater intervention: experimental results of the MARIS project[J]. IEEE Journal of Oceanic Engineering, 2018, 43 (3): 620- 639
doi: 10.1109/JOE.2017.2733878
|
| 97 |
WANG H, HUANG X, QI X, et al. Development of underwater robot hand and its finger tracking control [C]// Proceedings of the IEEE International Conference on Automation and Logistics. Jinan: IEEE, 2007: 2973–2977.
|
| 98 |
MENG Q, WANG H, LI P, et al. Dexterous underwater robot hand: HEU hand II [C]// Proceedings of the International Conference on Mechatronics and Automation. Luoyang: IEEE, 2006: 1477–1482.
|
| 99 |
SPADAFORA F, MUZZUPAPPA M, BRUNO F, et al Design and construction of a robot hand prototype for underwater applications[J]. IFAC-PapersOnLine, 2015, 48 (2): 294- 299
doi: 10.1016/j.ifacol.2015.06.048
|
| 100 |
STUART H, WANG S, KHATIB O, et al The Ocean One hands: an adaptive design for robust marine manipulation[J]. The International Journal of Robotics Research, 2017, 36 (2): 150- 166
doi: 10.1177/0278364917694723
|
| 101 |
BEMFICA J R, MELCHIORRI C, MORIELLO L, et al Mechatronic design of a three-fingered gripper for underwater applications[J]. IFAC Proceedings Volumes, 2013, 46 (5): 307- 312
doi: 10.3182/20130410-3-CN-2034.00080
|
| 102 |
BEMFICA J R, MELCHIORRI C, MORIELLO L, et al. A three-fingered cable-driven gripper for underwater applications [C]// Proceedings of the IEEE International Conference on Robotics and Automation. Hong Kong: IEEE, 2014: 2469–2474.
|
| 103 |
WANG T, GE L, GU G Programmable design of soft pneu-net actuators with oblique chambers can generate coupled bending and twisting motions[J]. Sensors and Actuators A: Physical, 2018, 271: 131- 138
doi: 10.1016/j.sna.2018.01.018
|
| 104 |
LIU J, IACOPONI S, LASCHI C, et al Underwater mobile manipulation: a soft arm on a benthic legged robot[J]. IEEE Robotics & Automation Magazine, 2020, 27 (4): 12- 26
|
| 105 |
GONG Z, CHEN B, LIU J, et al An opposite-bending-and-extension soft robotic manipulator for delicate grasping in shallow water[J]. Frontiers in Robotics and AI, 2019, 6: 26
doi: 10.3389/frobt.2019.00026
|
| 106 |
VOGT D M, BECKER K P, PHILLIPS B T, et al Shipboard design and fabrication of custom 3D-printed soft robotic manipulators for the investigation of delicate deep-sea organisms[J]. PLoS One, 2018, 13 (8): e0200386
doi: 10.1371/journal.pone.0200386
|
| 107 |
SINATRA N R, TEEPLE C B, VOGT D M, et al Ultragentle manipulation of delicate structures using a soft robotic gripper[J]. Science Robotics, 2019, 4 (33): eaax5425
doi: 10.1126/scirobotics.aax5425
|
| 108 |
DOU J, ZHANG D, SUN Y, et al. Design of enveloping underwater soft gripper based on the bionic structure [C]// International Conference on Intelligent Robotics and Applications. Harbin: Springer, 2022: 311–322.
|
| 109 |
WU M, AFRIDI W H, WU J, et al Octopus-inspired underwater soft robotic gripper with crawling and swimming capabilities[J]. Research, 2024, 7: 456
doi: 10.34133/research.0456
|
| 110 |
GALLOWAY K C, BECKER K P, PHILLIPS B, et al Soft robotic grippers for biological sampling on deep reefs[J]. Soft Robotics, 2016, 3 (1): 23- 33
doi: 10.1089/soro.2015.0019
|
| 111 |
LICHT S, COLLINS E, BALLAT-DURAND D, et al. Universal jamming grippers for deep-sea manipulation [C]// Proceedings of the OCEANS 2016 MTS/IEEE Monterey. Monterey: IEEE, 2016: 1–5.
|
| 112 |
ABOZAID Y A, ABOELRAYAT M T, FAHIM I S, et al Soft robotic grippers: a review on technologies, materials, and applications[J]. Sensors and Actuators A: Physical, 2024, 372: 115380
doi: 10.1016/j.sna.2024.115380
|
| 113 |
SHINTAKE J, SHEA H, FLOREANO D. Biomimetic underwater robots based on dielectric elastomer actuators [C]// Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Daejeon: IEEE, 2016: 4957–4962.
|
| 114 |
KOFOD G, WIRGES W, PAAJANEN M, et al Energy minimization for self-organized structure formation and actuation[J]. Applied Physics Letters, 2007, 90 (8): 81916
doi: 10.1063/1.2695785
|
| 115 |
ENGEBERG E D, DILIBAL S, VATANI M, et al Anthropomorphic finger antagonistically actuated by SMA plates[J]. Bioinspiration & Biomimetics, 2015, 10 (5): 56002
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|