[2]
WANG F, LIU H, CAO L, et al. A novel lightweight underwater manipulator based on ROS2 for reliable intervention [C]// Proceedings of the 9th International Conference on Automation, Control and Robotics Engineering . Jeju Island: IEEE, 2024: 345–349.
[本文引用: 1]
[3]
ANTONELLI G. Underwater robots: 2nd edition [M]. Cham: Springer, 2006: 1–7.
[本文引用: 1]
[4]
JONES D O B Using existing industrial remotely operated vehicles for deep-sea science
[J]. Zoologica Scripta , 2009 , 38 (s1 ): 41 - 47
DOI:10.1111/j.1463-6409.2007.00315.x
[5]
HOTTA S, MITSUI Y, SUKA M, et al Lightweight underwater robot developed for archaeological surveys and excavations
[J]. ROBOMECH Journal , 2023 , 10 (1 ): 2
DOI:10.1186/s40648-023-00240-4
[本文引用: 1]
[7]
KOŁODZIEJCZYK W Some considerations on an underwater robotic manipulator subjected to the environmental disturbances caused by water current
[J]. Acta Mechanica et Automatica , 2016 , 10 (1 ): 43 - 49
DOI:10.1515/ama-2016-0008
[本文引用: 1]
[8]
ZHONG Y, YANG F Dynamic modeling and adaptive fuzzy sliding mode control for multi-link underwater manipulators
[J]. Ocean Engineering , 2019 , 187 : 106202
DOI:10.1016/j.oceaneng.2019.106202
[本文引用: 1]
[9]
ANDERSON V C. MPL experimental RUM [R]. La Jolla: Scripps Institution of Oceanography, 1960: SIO Reference 60-26.
[本文引用: 1]
[10]
纪辉, 兰宇, 武子为, 等 面向水下作业的水液压机械手研究与展望
[J]. 机械工程学报 , 2023 , 59 (4 ): 283 - 294
DOI:10.3901/JME.2023.04.283
[本文引用: 1]
JI Hui, LAN Yu, WU Ziwei, et al Research progress and prospect of water hydraulic manipulator for underwater operation
[J]. Journal of Mechanical Engineering , 2023 , 59 (4 ): 283 - 294
DOI:10.3901/JME.2023.04.283
[本文引用: 1]
[11]
WANG Z, CUI W For safe and compliant interaction: an outlook of soft underwater manipulators
[J]. Proceedings of the Institution of Mechanical Engineers, Part M: Journal of Engineering for the Maritime Environment , 2021 , 235 (1 ): 3 - 14
DOI:10.1177/1475090220950911
[本文引用: 1]
[12]
Woods Hole Oceanographic Institution. History of Alvin [EB/OL]. [2024-07-15]. https://www.whoi.edu/what-we-do/explore/underwater-vehicles/hov-alvin/history-of-alvin/.
[本文引用: 1]
[13]
顾云冠, 曹智裕, 王道炎, 等. 系缆无人遥控潜水器HR01[J]. 海洋工程, 1987, 5(4): 1–7.
[本文引用: 2]
GU Yunguan, CAO Zhiyu, WANG Daoyan, et al. Tethered remotely operated vehicle HR01 [J]. The Ocean Engineering , 1987, 5(4): 1–7.
[本文引用: 2]
[14]
Schilling Robotics. Manipulator systems [EB/OL]. [2024-07-15]. https://www.technipfmc.com/en/what-we-do/subsea/robotics/manipulator-systems/.
[本文引用: 5]
[15]
Kratf TeleRobotics. Products [EB/OL]. [2024-07-15]. http://krafttelerobotics.cn/products/index.html.
[本文引用: 4]
[16]
Hydro-Lek. Manipulators [EB/OL]. [2024-07-15]. http://www.hydro-lek.com/manipulators.php.
[本文引用: 3]
[17]
Forum Energy Technologies. ROV tooling and components [EB/OL]. [2024-07-15]. https://f-e-t.com/subsea/rov-tooling-and-components/.
[本文引用: 2]
[18]
KNR Systems Inc. HYDRA-UW [EB/OL]. [2024-07-15]. http://rnd.knrsys.com/english/view.html?id_no=25&id_no1=5.
[本文引用: 1]
[19]
Oceaneering. Atlas hybrid manipulator [EB/OL]. [2024-07-15]. https://www.oceaneering.com/brochures/atlas-hybrid-manipulator/.
[本文引用: 1]
[20]
Seamor Marine Ltd. Hydraulic articulating robotic manipulator [EB/OL]. [2024-07-15]. https://www.environmental-expert.com/products/seamor-model-7f-h-arm-hydraulic-articulating-robotic-manipulator-281530.
[本文引用: 1]
[21]
Envirex. Hydraulic light-weight manipulator series [EB/OL]. [2024-07-15]. https://envirex.no/titanrob/.
[本文引用: 3]
[22]
ISE. Magnum subsea manipulators with integrated telemetry [EB/OL]. [2024-07-15]. http://207.102.77.253/manips.html.
[本文引用: 3]
[23]
杨喜荣. 深海水下作业型机械手控制系统研究[D]. 杭州: 浙江大学, 2006.
[本文引用: 2]
YANG Xirong. Research on control system of deep-sea underwater manipulator [D]. Hangzhou: Zhejiang University, 2006.
[本文引用: 2]
[24]
中国科学院沈阳自动化研究所. 7000米深海作业机械手[EB/OL]. (2015-10-23) [2024-07-20]. http://www.sia.cas.cn/kxcb/kpwz/201510/t20151023_4444028.html.
[本文引用: 2]
[25]
申雄. 模拟深水环境下双机械手协调作业关键技术研究[D]. 武汉: 华中科技大学, 2013.
[本文引用: 2]
SHEN Xiong. Study on key technologies for coordinated manipulation for dual manipulators in simulated deepwater environment [D]. Wuhan: Huazhong University of Science and Technology, 2013.
[本文引用: 2]
[26]
罗高生. 深海七功能主从液压机械手及其非线性鲁棒控制方法研究[D]. 杭州: 浙江大学, 2013.
[本文引用: 2]
LUO Gaosheng. Research on subsea 7 function master-slave hydraulic manipulator and its nonlinear robust control [D]. Hangzhou: Zhejiang University, 2013.
[本文引用: 2]
[27]
向忠祥, 茅及愚 “鱼鹰”号载人潜器打捞机械手的研制
[J]. 海洋技术 , 1990 , 9 (1 ): 12 - 17
[本文引用: 1]
XIANG Zhongxiang, MAO Jiyu Manipulator development for manned underwater salvage vehicle “the cormorant”
[J]. Ocean Technology , 1990 , 9 (1 ): 12 - 17
[本文引用: 1]
[28]
茅及愚, 张向明, 徐国华, 等 兰鲸号潜器两型机械手的结构设计研究
[J]. 海洋工程 , 1998 , 16 (1 ): 81 - 88
[本文引用: 2]
MAO Jiyu, ZHANG Xiangming, XU Guohua, et al The structure design and study of two manipulators on blue whale underwater vehicle
[J]. The Ocean Engineering , 1998 , 16 (1 ): 81 - 88
[本文引用: 2]
[29]
王千年. 深海液压机械臂的设计与分析[D]. 合肥: 中国科学技术大学, 2021: 6.
[本文引用: 1]
WANG Qiannian. Design and analysis of deep sea hydraulic manipulator [D]. Hefei: University of Science and Technology of China, 2021: 6.
[本文引用: 1]
[30]
孟庆鑫, 叶华武, 王晓东 SIWR-Ⅱ水下作业机械手动力机构特性分析
[J]. 哈尔滨船舶工程学院学报 , 1993 , 14 (1 ): 60 - 65
[本文引用: 1]
MENG Qingxin, YE Huawu, WANG Xiaodong Analyzing the characteristics of the motive mechanism of SIWR-Ⅱ manipulator under the water
[J]. Journal of Harbin Shipbuilding Engineering Institute , 1993 , 14 (1 ): 60 - 65
[本文引用: 1]
[31]
YOERGER D R, SCHEMPF H, DIPIETRO D M Design and performance evaluation of an actively compliant underwater manipulator for full-ocean depth
[J]. Journal of Robotic Systems , 1991 , 8 (3 ): 371 - 392
DOI:10.1002/rob.4620080306
[本文引用: 2]
[32]
王承禧, 徐国华, 黄群, 等 自主式水下机械手系统研究
[J]. 海洋工程 , 1996 , 14 (3 ): 28 - 36
[本文引用: 2]
WANG Chengxi, XU Guohua, HUANG Qun, et al The research on autonomous underwater manipulator system
[J]. The Ocean Engineering , 1996 , 14 (3 ): 28 - 36
[本文引用: 2]
[33]
LANE D M, DAVIES J B C, CASALINO G, et al AMADEUS: advanced manipulation for deep underwater sampling
[J]. IEEE Robotics & Automation Magazine , 1997 , 4 (4 ): 34 - 45
[本文引用: 2]
[34]
YUH J, CHOI S K, IKEHARA C, et al. Design of a semi-autonomous underwater vehicle for intervention missions (SAUVIM) [C]// Proceedings of 1998 International Symposium on Underwater Technology . Tokyo: IEEE, 1998: 63–68.
[本文引用: 2]
[35]
RIBAS D, RIDAO P, TURETTA A, et al I-AUV mechatronics integration for the TRIDENT FP7 project
[J]. IEEE/ASME Transactions on Mechatronics , 2015 , 20 (5 ): 2583 - 2592
DOI:10.1109/TMECH.2015.2395413
[本文引用: 1]
[36]
FERNÁNDEZ J J, PRATS M, SANZ P J, et al Grasping for the seabed: developing a new underwater robot arm for shallow-water intervention
[J]. IEEE Robotics & Automation Magazine , 2013 , 20 (4 ): 121 - 130
[本文引用: 1]
[37]
张奇峰, 张艾群 基于能源消耗最小的自治水下机器人—机械手系统协调运动研究
[J]. 机器人 , 2006 , 28 (4 ): 444 - 447
[本文引用: 2]
ZHANG Qifeng, ZHANG Aiqun Coordinated motion of an autonomous underwater vehicle-manipulator system based on energy consumption minimization
[J]. Robot , 2006 , 28 (4 ): 444 - 447
[本文引用: 2]
[38]
XIAO Z, XU G, PENG F, et al Development of a deep ocean electric autonomous manipulator
[J]. China Ocean Engineering , 2011 , 25 (1 ): 159 - 168
DOI:10.1007/s13344-011-0014-9
[本文引用: 2]
[39]
HU X, CHEN J, ZHOU H, et al Development of underwater electric manipulator based on interventional autonomous underwater vehicle (AUV)
[J]. Journal of Zhejiang University: Science A , 2024 , 25 (3 ): 238 - 250
DOI:10.1631/jzus.A2200621
[本文引用: 2]
[40]
南京华研. 水下电动机械臂 [EB/OL]. [2024-07-21]. https://www.huayanseal.com/?list_8/.
[本文引用: 4]
[41]
Graal Tech. UMA-1500-Manipulator [EB/OL]. [2024-07-20]. https://www.graaltech.com/products/uma-1500/.
[本文引用: 1]
[42]
SMITH J S, YU R, SARAFIS I, et al. Computer vision control of an underwater manipulator [C]// Proceedings of OCEANS'94 . Brest: IEEE, 1994: I/187–I/192.
[本文引用: 1]
[43]
LEWANDOWSKI C, AKIN D, DILLOW B, et al. Development of a deep-sea robotic manipulator for autonomous sampling and retrieval [C]// Proceedings of the IEEE/OES Autonomous Underwater Vehicles . Woods Hole: IEEE, 2008: 1–6.
[本文引用: 1]
[44]
TERRIBILE A, PRENDIN W, LANZA R. An innovative electromechanical underwater telemanipulator-present status and future development [C]// Proceedings of OCEANS'94 . Brest: IEEE, 2002: II/188–II/191.
[本文引用: 1]
[45]
Ocean Innovation System. STR OIS STR 5 function electric manipulator arm [EB/OL]. [2024-07-20]. https://www.str-subsea.com/products/rov-tools/manipulators-boom-arms/str-ois-str-5-function-electric-manipulator-arm.
[本文引用: 1]
[46]
Reach Robotics. ROV arms for harsh environments [EB/OL]. [2024-07-20]. https://reachrobotics.com/products/manipulators/.
[本文引用: 2]
[47]
ECA. Subsea electrical manipulator arms [EB/OL]. [2024-07-20]. https://www.ecagroup.com/en/solutions/subsea-electrical-manipulator-arms.
[本文引用: 3]
[48]
张建华. 深海模拟环境中液压水下机械手的仿真研究[D]. 武汉: 华中科技大学, 2012.
[本文引用: 1]
ZHANG Jianhua. Research and simulation of hydraulic underwater manipulator in the simulated environment of deep sea [D]. Wuhan: Huazhong University of Science and Technology, 2012.
[本文引用: 1]
[49]
安江波. 大时延水下机械手位置伺服控制技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2008.
[本文引用: 1]
AN Jiangbo. Research on position servo control of underwater manipulator with time delay [D]. Harbin: Harbin Engineering University, 2008.
[本文引用: 1]
[50]
PURUSHOTHAM A Kane’s method for robotic arm dynamics: a novel approach
[J]. IOSR Journal of Mechanical and Civil Engineering , 2013 , 6 (4 ): 7 - 13
DOI:10.9790/1684-640713
[本文引用: 1]
[51]
裴香丽, 田颖, 张明路 水下机械手水动力学分析及控制方法研究
[J]. 船舶力学 , 2022 , 26 (5 ): 679 - 690
[本文引用: 1]
PEI Xiangli, TIAN Ying, ZHANG Minglu Research on hydrodynamic analysis and control method of underwater manipulators
[J]. Journal of Ship Mechanics , 2022 , 26 (5 ): 679 - 690
[本文引用: 1]
[52]
MORISON J R, JOHNSON J W, SCHAAF S A The force exerted by surface waves on piles
[J]. Journal of Petroleum Technology , 1950 , 2 (5 ): 149 - 154
DOI:10.2118/950149-G
[本文引用: 1]
[53]
王华, 孟庆鑫, 王立权 基于切片理论的水下灵巧手手指动力学分析
[J]. 机器人 , 2007 , 29 (2 ): 160 - 166
[本文引用: 1]
WANG Hua, MENG Qingxin, WANG Liquan Analysis on finger dynamics of dexterous underwater hand based on strip theory
[J]. Robot , 2007 , 29 (2 ): 160 - 166
[本文引用: 1]
[54]
王懿, 张爱霞, 郭瑞岩, 等 六自由度水下机械臂动力学模型及流阻影响研究
[J]. 北京理工大学学报 , 2020 , 40 (11 ): 1143 - 1149
[本文引用: 1]
WANG Yi, ZHANG Aixia, GUO Ruiyan, et al Dynamic model of 6-DOF underwater manipulator and its influence of flow resistance
[J]. Transactions of Beijing Institute of Technology , 2020 , 40 (11 ): 1143 - 1149
[本文引用: 1]
[55]
高涵, 张明路, 张小俊, 等 水下机械手动力学模型及力矩影响研究
[J]. 机械设计与制造 , 2017 , (3 ): 68 - 71
[本文引用: 1]
GAO Han, ZHANG Minglu, ZHANG Xiaojun, et al Research on underwater manipulator dynamics model and torque influence
[J]. Machinery Design & Manufacture , 2017 , (3 ): 68 - 71
[本文引用: 1]
[56]
ZHAO S, YUH J Experimental study on advanced underwater robot control
[J]. IEEE Transactions on Robotics , 2005 , 21 (4 ): 695 - 703
DOI:10.1109/TRO.2005.844682
[本文引用: 1]
[57]
肖治琥, 徐国华 流干扰下的水下机械手动力学建模分析
[J]. 中国机械工程 , 2011 , 22 (21 ): 2521 - 2526
[本文引用: 1]
XIAO Zhihu, XU Guohua Study on dynamics of underwater manipulator under flow influences
[J]. China Mechanical Engineering , 2011 , 22 (21 ): 2521 - 2526
[本文引用: 1]
[58]
GE D, WANG G, GE J, et al Trajectory tracking control of two-joint underwater manipulator in ocean-wave environment
[J]. Ocean Engineering , 2024 , 292 : 116329
DOI:10.1016/j.oceaneng.2023.116329
[本文引用: 1]
[59]
刘晓瑜, 田颖, 张明路 水下机械手动力学研究综述
[J]. 工程设计学报 , 2021 , 28 (4 ): 389 - 398
[本文引用: 1]
LIU Xiaoyu, TIAN Ying, ZHANG Minglu Review of underwater manipulator dynamics research
[J]. Chinese Journal of Engineering Design , 2021 , 28 (4 ): 389 - 398
[本文引用: 1]
[60]
KOLODZIEJCZYK W The method of determination of transient hydrodynamic coefficients for a single DOF underwater manipulator
[J]. Ocean Engineering , 2018 , 153 : 122 - 131
DOI:10.1016/j.oceaneng.2018.01.090
[本文引用: 1]
[61]
SARPKAYA T Lift, drag, and added-mass coefficients for a circular cylinder immersed in a time-dependent flow
[J]. Journal of Applied Mechanics , 1963 , 30 (1 ): 13 - 15
DOI:10.1115/1.3630062
[本文引用: 1]
[62]
KOŁODZIEJCZYK W, KOŁODZIEJCZYK M, KUŹMIEROWSKI T, et al Transient hydrodynamic coefficients for a single DOF underwater manipulator of a square cross-section
[J]. Ocean Engineering , 2023 , 268 : 113438
DOI:10.1016/j.oceaneng.2022.113438
[本文引用: 1]
[63]
WANG X, LIU Y, XUE G, et al Transient hydrodynamics coefficients analysis of a six-degree-of-freedom underwater manipulator
[J]. Ocean Engineering , 2024 , 312 : 119156
DOI:10.1016/j.oceaneng.2024.119156
[本文引用: 1]
[64]
刘晓瑜. 基于水动力学的水下机械臂动力学分析及仿真实 验[D].天津: 河北工业大学, 2021.
[本文引用: 1]
LIU Xiaoyu. Research on dynamic analysis and simulation test of underwater manipulator based on hydrodynamics [D]. Tianjin: Hebei University of Technology, 2021.
[本文引用: 1]
[65]
王庆云, 韩明勇, 常开应, 等 水下机器人水动力参数CFD计算及操纵性预报
[J]. 中国海洋平台 , 2023 , 38 (1 ): 50 - 56
DOI:10.12226/j.issn.1001-4500.2023.01.20230108
[本文引用: 1]
WANG Qingyun, HAN Mingyong, CHANG Kaiying, et al CFD calculation of underwater vehicle hydrodynamic parameters and maneuverability prediction
[J]. China Offshore Platform , 2023 , 38 (1 ): 50 - 56
DOI:10.12226/j.issn.1001-4500.2023.01.20230108
[本文引用: 1]
[66]
胡志强, 林扬, 谷海涛 水下机器人粘性类水动力数值计算方法研究
[J]. 机器人 , 2007 , 29 (2 ): 145 - 150
[本文引用: 1]
HU Zhiqiang, LIN Yang, GU Haitao On numerical computation of viscous hydrodynamics of unmanned underwater vehicle
[J]. Robot , 2007 , 29 (2 ): 145 - 150
[本文引用: 1]
[67]
FILARETOV V F, KONOPLIN A J, GETMAN A V Experimental determination of the viscous friction coefficients for calculation of the force impacts on the moving links of the underwater manipulators
[J]. Mehatronika, Avtomatizacia, Upravlenie , 2015 , 16 (11 ): 738 - 743
DOI:10.17587/mau.16.738-743
[本文引用: 1]
[68]
ZHANG M, LIU X, TIAN Y Modeling analysis and simulation of viscous hydrodynamic model of single-DOF manipulator
[J]. Journal of Marine Science and Engineering , 2019 , 7 (8 ): 261
DOI:10.3390/jmse7080261
[本文引用: 1]
[69]
安江波, 张铭钧, 孙昌将 水下机械手控制系统研究
[J]. 机械设计与制造 , 2009 , (5 ): 185 - 187
[本文引用: 1]
AN Jiangbo, ZHANG Mingjun, SUN Changjiang Research on control of underwater manipulator
[J]. Machinery Design & Manufacture , 2009 , (5 ): 185 - 187
[本文引用: 1]
[70]
程尉. 小型水下双臂机械手控制系统研究[D]. 武汉: 华中科技大学, 2020.
[本文引用: 1]
CHENG Wei. Research on small underwater dual-arm manipulator control system [D]. Wuhan: Huazhong University of Science and Technology, 2020.
[本文引用: 1]
[71]
YUH J, ZHAO S, LEE P M. Application of adaptive disturbance observer control to an underwater manipulator [C]// IEEE International Conference on Robotics and Automation . Seoul: IEEE, 2001: 3244–3249.
[本文引用: 1]
[72]
SANTHAKUMAR M A nonregressor nonlinear disturbance observer-based adaptive control scheme for an underwater manipulator
[J]. Advanced Robotics , 2013 , 27 (16 ): 1273 - 1283
DOI:10.1080/01691864.2013.819608
[本文引用: 1]
[73]
XU G, XIAO Z, GUO Y, et al. Trajectory tracking for underwater manipulator using sliding mode control [C]// Proceedings of the IEEE International Conference on Robotics and Biomimetics . Sanya: IEEE, 2007: 2127–2132.
[本文引用: 1]
[74]
VENKATESAN V, MOHAN S, KIM J. Disturbance observer based terminal sliding mode control of an underwater manipulator [C]// Proceedings of the 13th International Conference on Control Automation Robotics & Vision . Singapore: IEEE, 2014: 1566–1572.
[本文引用: 1]
[75]
谭定忠, 张铭钧, 王立权, 等 水下作业液压机械手夹持力模糊控制技术的研究
[J]. 机床与液压 , 2001 , 29 (1 ): 24 - 25
DOI:10.3969/j.issn.1001-3881.2001.01.010
[本文引用: 1]
TAN Dingzhong, ZHANG Mingjun, WANG Liquan, et al Research on fuzzy control technology of grasping force in underwater hydraulic manipulator
[J]. Machine Tool & Hydraulics , 2001 , 29 (1 ): 24 - 25
DOI:10.3969/j.issn.1001-3881.2001.01.010
[本文引用: 1]
[76]
杨犇, 梁喜凤 基于模糊补偿的七自由度机械手轨迹跟踪控制
[J]. 机床与液压 , 2012 , 40 (23 ): 73 - 75
[本文引用: 1]
YANG Ben, LIANG Xifeng Track following control of a 7-DOF manipulator based on fuzzy logic compensation
[J]. Machine Tool & Hydraulics , 2012 , 40 (23 ): 73 - 75
[本文引用: 1]
[77]
LUO W, CONG H. Robust NN control of the manipulator in the underwater vehicle-manipulator system [C]// Advances in Neural Networks . Hokkaido: Springer, 2017: 75–82.
[本文引用: 1]
[78]
SHANG D, LI X, YIN M, et al Rotation tracking control strategy of underwater flexible telescopic manipulator based on neural network compensation for water environment disturbance
[J]. Ocean Engineering , 2023 , 284 : 115245
DOI:10.1016/j.oceaneng.2023.115245
[本文引用: 1]
[79]
王立权, 王春林, 杜维杰, 等 基于Fuzzy-PID的水下作业机械手控制系统设计
[J]. 液压与气动 , 2005 , 29 (1 ): 27 - 31
[本文引用: 1]
WANG Liquan, WANG Chunlin, DU Weijie, et al Design of hydraulic control system for an underwater manipulator based on fuzzy-PID
[J]. Chinese Hydraulics & Pneumatics , 2005 , 29 (1 ): 27 - 31
[本文引用: 1]
[80]
胡雯蔷, 徐筱龙, 徐国华 基于小脑模型关节控制器的水下机械手复合运动控制的研究及仿真
[J]. 中国机械工程 , 2008 , 19 (16 ): 1891 - 1894
[本文引用: 1]
HU Wenqiang, XU Xiaolong, XU Guohua Research and simulation on multiplex-athletics control of underwater manipulator based on CMAC
[J]. China Mechanical Engineering , 2008 , 19 (16 ): 1891 - 1894
[本文引用: 1]
[81]
付雯, 温浩, 黄俊珲, 等 基于非线性动力学模型补偿的水下机械臂自适应滑模控制
[J]. 清华大学学报: 自然科学版 , 2023 , 63 (7 ): 1068 - 1077
[本文引用: 1]
FU Wen, WEN Hao, HUANG Junhui, et al Adaptive sliding mode control of underwater manipulator based on nonlinear dynamics model compensation
[J]. Journal of Tsinghua University: Science and Technology , 2023 , 63 (7 ): 1068 - 1077
[本文引用: 1]
[82]
高阳, 张晓晖, 高玉儿, 等 基于神经网络和模糊补偿的水下机械臂控制
[J]. 计算机工程与应用 , 2022 , 58 (15 ): 317 - 323
[本文引用: 1]
GAO Yang, ZHANG Xiaohui, GAO Yu’er, et al Control of underwater manipulator based on neural network and fuzzy compensation
[J]. Computer Engineering and Applications , 2022 , 58 (15 ): 317 - 323
[本文引用: 1]
[83]
HILDEBRANDT M, KERDELS J, ALBIEZ J, et al. Robust vision-based semi-autonomous underwater manipulation [M]// Intelligent Autonomous Systems 10 . Baden: IOS Press, 2008: 308–315.
[本文引用: 1]
[84]
SIVČEV S, ROSSI M, COLEMAN J, et al Fully automatic visual servoing control for work-class marine intervention ROVs
[J]. Control Engineering Practice , 2018 , 74 : 153 - 167
DOI:10.1016/j.conengprac.2018.03.005
[本文引用: 1]
[85]
肖治琥. 深水机械手动力学特性及自主作业研究[D]. 武汉: 华中科技大学, 2011.
[本文引用: 1]
XIAO Zhihu. Study on dynamic characteristics and autonomous manipulation of underwater manipulator [D]. Wuhan: Huazhong University of Science and Technology, 2011.
[本文引用: 1]
[86]
JUN B H, SHIM H W, LEE P M, et al. Workspace control system of underwater tele-operated manipulators on ROVs [C]// Proceedings of the OCEANS 2009-EUROPE . Bremen: IEEE, 2009: 1–6.
[本文引用: 1]
[87]
CARRERA A, PALOMERAS N, HURTÓS N, et al Cognitive system for autonomous underwater intervention
[J]. Pattern Recognition Letters , 2015 , 67 : 91 - 99
DOI:10.1016/j.patrec.2015.06.010
[本文引用: 1]
[88]
LANE D M, MAURELLI F, KORMUSHEV P, et al PANDORA-persistent autonomy through learning, adaptation, observation and replanning
[J]. IFAC-PapersOnLine , 2015 , 48 (2 ): 238 - 243
DOI:10.1016/j.ifacol.2015.06.039
[本文引用: 1]
[89]
王聪, 张子扬, 陈言壮, 等 基于深度强化学习与多参数域随机化的水下机械手自适应抓取研究
[J]. 信息与控制 , 2022 , 51 (6 ): 651 - 661
[本文引用: 1]
WANG Cong, ZHANG Ziyang, CHEN Yanzhuang, et al Deep reinforcement learning and multi-parameter domain randomization based underwater adaptive grasping research for underwater manipulator
[J]. Information and Control , 2022 , 51 (6 ): 651 - 661
[本文引用: 1]
[90]
HUANG H, JIANG T, ZHANG Z, et al Learning strategies for underwater robot autonomous manipulation control
[J]. Journal of the Franklin Institute , 2024 , 361 (7 ): 106773
DOI:10.1016/j.jfranklin.2024.106773
[本文引用: 1]
[91]
YANG X, GAO J, WANG P, et al Digital twin-based stress prediction for autonomous grasping of underwater robots with reinforcement learning
[J]. Expert Systems with Applications , 2025 , 267 : 126164
DOI:10.1016/j.eswa.2024.126164
[本文引用: 1]
[92]
LANE D M, DAVIES J B C, ROBINSON G, et al The AMADEUS dextrous subsea hand: design, modeling, and sensor processing
[J]. IEEE Journal of Oceanic Engineering , 1999 , 24 (1 ): 96 - 111
DOI:10.1109/48.740158
[本文引用: 2]
[93]
TAKEUCHI K, NOMURA S, TAMAMOTO T, et al. Development of multi-joint gripper for underwater operations [C]// Proceedings of the OCEANS - MTS/IEEE Kobe Techno-Oceans . Kobe: IEEE, 2018: 1–6.
[本文引用: 2]
[94]
TEOH Z E, PHILLIPS B T, BECKER K P, et al Rotary-actuated folding polyhedrons for midwater investigation of delicate marine organisms
[J]. Science Robotics , 2018 , 3 (20 ): eaat5276
DOI:10.1126/scirobotics.aat5276
[本文引用: 2]
[95]
KAMPMANN P, KIRCHNER F Towards a fine-manipulation system with tactile feedback for deep-sea environments
[J]. Robotics and Autonomous Systems , 2015 , 67 : 115 - 121
DOI:10.1016/j.robot.2014.09.033
[本文引用: 2]
[96]
SIMETTI E, WANDERLINGH F, TORELLI S, et al Autonomous underwater intervention: experimental results of the MARIS project
[J]. IEEE Journal of Oceanic Engineering , 2018 , 43 (3 ): 620 - 639
DOI:10.1109/JOE.2017.2733878
[本文引用: 2]
[97]
WANG H, HUANG X, QI X, et al. Development of underwater robot hand and its finger tracking control [C]// Proceedings of the IEEE International Conference on Automation and Logistics . Jinan: IEEE, 2007: 2973–2977.
[本文引用: 2]
[98]
MENG Q, WANG H, LI P, et al. Dexterous underwater robot hand: HEU hand II [C]// Proceedings of the International Conference on Mechatronics and Automation . Luoyang: IEEE, 2006: 1477–1482.
[本文引用: 2]
[99]
SPADAFORA F, MUZZUPAPPA M, BRUNO F, et al Design and construction of a robot hand prototype for underwater applications
[J]. IFAC-PapersOnLine , 2015 , 48 (2 ): 294 - 299
DOI:10.1016/j.ifacol.2015.06.048
[本文引用: 2]
[100]
STUART H, WANG S, KHATIB O, et al The Ocean One hands: an adaptive design for robust marine manipulation
[J]. The International Journal of Robotics Research , 2017 , 36 (2 ): 150 - 166
DOI:10.1177/0278364917694723
[本文引用: 2]
[101]
BEMFICA J R, MELCHIORRI C, MORIELLO L, et al Mechatronic design of a three-fingered gripper for underwater applications
[J]. IFAC Proceedings Volumes , 2013 , 46 (5 ): 307 - 312
DOI:10.3182/20130410-3-CN-2034.00080
[本文引用: 2]
[102]
BEMFICA J R, MELCHIORRI C, MORIELLO L, et al. A three-fingered cable-driven gripper for underwater applications [C]// Proceedings of the IEEE International Conference on Robotics and Automation . Hong Kong: IEEE, 2014: 2469–2474.
[本文引用: 2]
[103]
WANG T, GE L, GU G Programmable design of soft pneu-net actuators with oblique chambers can generate coupled bending and twisting motions
[J]. Sensors and Actuators A: Physical , 2018 , 271 : 131 - 138
DOI:10.1016/j.sna.2018.01.018
[本文引用: 1]
[104]
LIU J, IACOPONI S, LASCHI C, et al Underwater mobile manipulation: a soft arm on a benthic legged robot
[J]. IEEE Robotics & Automation Magazine , 2020 , 27 (4 ): 12 - 26
[本文引用: 1]
[105]
GONG Z, CHEN B, LIU J, et al An opposite-bending-and-extension soft robotic manipulator for delicate grasping in shallow water
[J]. Frontiers in Robotics and AI , 2019 , 6 : 26
DOI:10.3389/frobt.2019.00026
[106]
VOGT D M, BECKER K P, PHILLIPS B T, et al Shipboard design and fabrication of custom 3D-printed soft robotic manipulators for the investigation of delicate deep-sea organisms
[J]. PLoS One , 2018 , 13 (8 ): e0200386
DOI:10.1371/journal.pone.0200386
[本文引用: 2]
[107]
SINATRA N R, TEEPLE C B, VOGT D M, et al Ultragentle manipulation of delicate structures using a soft robotic gripper
[J]. Science Robotics , 2019 , 4 (33 ): eaax5425
DOI:10.1126/scirobotics.aax5425
[本文引用: 2]
[108]
DOU J, ZHANG D, SUN Y, et al. Design of enveloping underwater soft gripper based on the bionic structure [C]// International Conference on Intelligent Robotics and Applications . Harbin: Springer, 2022: 311–322.
[本文引用: 2]
[109]
WU M, AFRIDI W H, WU J, et al Octopus-inspired underwater soft robotic gripper with crawling and swimming capabilities
[J]. Research , 2024 , 7 : 456
DOI:10.34133/research.0456
[本文引用: 2]
[110]
GALLOWAY K C, BECKER K P, PHILLIPS B, et al Soft robotic grippers for biological sampling on deep reefs
[J]. Soft Robotics , 2016 , 3 (1 ): 23 - 33
DOI:10.1089/soro.2015.0019
[本文引用: 2]
[111]
LICHT S, COLLINS E, BALLAT-DURAND D, et al. Universal jamming grippers for deep-sea manipulation [C]// Proceedings of the OCEANS 2016 MTS/IEEE Monterey . Monterey: IEEE, 2016: 1–5.
[本文引用: 2]
[112]
ABOZAID Y A, ABOELRAYAT M T, FAHIM I S, et al Soft robotic grippers: a review on technologies, materials, and applications
[J]. Sensors and Actuators A: Physical , 2024 , 372 : 115380
DOI:10.1016/j.sna.2024.115380
[本文引用: 1]
[113]
SHINTAKE J, SHEA H, FLOREANO D. Biomimetic underwater robots based on dielectric elastomer actuators [C]// Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems . Daejeon: IEEE, 2016: 4957–4962.
[本文引用: 1]
[114]
KOFOD G, WIRGES W, PAAJANEN M, et al Energy minimization for self-organized structure formation and actuation
[J]. Applied Physics Letters , 2007 , 90 (8 ): 81916
DOI:10.1063/1.2695785
[本文引用: 1]
[115]
ENGEBERG E D, DILIBAL S, VATANI M, et al Anthropomorphic finger antagonistically actuated by SMA plates
[J]. Bioinspiration & Biomimetics , 2015 , 10 (5 ): 56002
[本文引用: 2]
[116]
VAR S C S, JOVANOVA J. Design of a soft underwater gripper with SMA actuation [C]// Proceedings of the ASME 2023 Conference on Smart Materials, Adaptive Structures and Intelligent Systems . Austin: American Society of Mechanical Engineers, 2023: V001T06A013.
[本文引用: 2]
Evolution of robotic arms
1
2007
... 20世纪50年代末,Joseph F. Englberger和George Devol开发了第一台工业机械臂Unimate[1 ] . 自此以后,工业机械臂逐步代替人类去执行一些复杂危险的任务,如搬运物体、焊接、救援等. 然而,人类活动的发展导致陆地资源逐渐枯竭. 随着人类获取资源的范围不断扩大,人们的目标开始由陆地转向太空、海洋. ...
1
... 近些年来,海洋作为人类生存的第二大空间,因丰富的自然资源而受到越来越多的关注. 随着海洋资源的开发和海洋科学研究的日益成熟,应对海洋环境作业的水下机械手逐渐兴起. 同时,随着海底油气开采装备、管道和桥梁等水工结构数量的增加和使用寿命的延长,水下检测和维护对确保其健康和安全至关重要[2 ] . 目前,水下结构的检查和维护工作主要由潜水员完成,但是潜水员只能在浅水区作业,并且面临巨大的安全风险. 因此,利用水下机械手替代潜水员执行这些任务的需求正在迅速增长. ...
1
... 水下航行器-机械手系统(underwater vehicle-manipulator system, UVMS)是执行水下操作任务的理想解决方案,主要用于管道检查、设备安装和拆除、障碍物清理、生物与地质取样、考古等任务[3 -5 ] . UVMS的水下机械手主要包括机械臂及末端执行器,大多采用拟人化设计,类似于人的手臂和手掌,如图1 所示. 机械臂由一系列刚体(连接体)组成,刚体间通过具有适当角位移的关节相互连接;末端执行器上连接有抓手或可互换工具等[6 ] . ...
Using existing industrial remotely operated vehicles for deep-sea science
0
2009
Lightweight underwater robot developed for archaeological surveys and excavations
1
2023
... 水下航行器-机械手系统(underwater vehicle-manipulator system, UVMS)是执行水下操作任务的理想解决方案,主要用于管道检查、设备安装和拆除、障碍物清理、生物与地质取样、考古等任务[3 -5 ] . UVMS的水下机械手主要包括机械臂及末端执行器,大多采用拟人化设计,类似于人的手臂和手掌,如图1 所示. 机械臂由一系列刚体(连接体)组成,刚体间通过具有适当角位移的关节相互连接;末端执行器上连接有抓手或可互换工具等[6 ] . ...
Underwater manipulators: a review
3
2018
... 水下航行器-机械手系统(underwater vehicle-manipulator system, UVMS)是执行水下操作任务的理想解决方案,主要用于管道检查、设备安装和拆除、障碍物清理、生物与地质取样、考古等任务[3 -5 ] . UVMS的水下机械手主要包括机械臂及末端执行器,大多采用拟人化设计,类似于人的手臂和手掌,如图1 所示. 机械臂由一系列刚体(连接体)组成,刚体间通过具有适当角位移的关节相互连接;末端执行器上连接有抓手或可互换工具等[6 ] . ...
... Parameters of existing foreign commercial hydraulic manipulators
Tab.1 液压机械手名称 研发公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 MK37[6 ] Western Space and Marine 6 11 000 0.94 43 16 23 — 力反馈 The ARM[6 ] Western Space and Marine 6 11 000 1.7 145 97 45.4 — 力反馈 Titan 4[14 ] Schilling Robotics 6 4 000 1.922 100 78 122 170 位置 Atlas 7P/7R[14 ] Schilling Robotics 6 6 500 1.675 73 50 250 205 速率 Orion 7P/7R[14 ] Schilling Robotics 6 6 500 2.013 54 38 68 205 位置/速率 Orion 4R[14 ] Schilling Robotics 3 6 500 2.013 64 48 181 205 速率 Grips[15 ] Kratf TeleRobotics 6 3 000 1.289 59 41 82 20 主从+力反馈 Raptor[15 ] Kratf TeleRobotics 6 3 000 1.639 75 44 227 135 主从+力反馈 Predator[15 ] Kratf TeleRobotics 6 3 000 2.013 80 51 227 135 主从+力反馈 HLK-43000 [16 ] Hydro-Lek 5 3 000 0.66 8.4 4.2 10 8.2 速率 HLK-5300 [16 ] Hydro-Lek 6 6 000 1.428 36 20.2 32 60 速率 TA40[17 ] Forum Energy Technologies 6 7 000 2.1 — — 70 — — TA60[17 ] Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率
国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
... [
6 ]
Western Space and Marine 6 11 000 1.7 145 97 45.4 — 力反馈 Titan 4[14 ] Schilling Robotics 6 4 000 1.922 100 78 122 170 位置 Atlas 7P/7R[14 ] Schilling Robotics 6 6 500 1.675 73 50 250 205 速率 Orion 7P/7R[14 ] Schilling Robotics 6 6 500 2.013 54 38 68 205 位置/速率 Orion 4R[14 ] Schilling Robotics 3 6 500 2.013 64 48 181 205 速率 Grips[15 ] Kratf TeleRobotics 6 3 000 1.289 59 41 82 20 主从+力反馈 Raptor[15 ] Kratf TeleRobotics 6 3 000 1.639 75 44 227 135 主从+力反馈 Predator[15 ] Kratf TeleRobotics 6 3 000 2.013 80 51 227 135 主从+力反馈 HLK-43000 [16 ] Hydro-Lek 5 3 000 0.66 8.4 4.2 10 8.2 速率 HLK-5300 [16 ] Hydro-Lek 6 6 000 1.428 36 20.2 32 60 速率 TA40[17 ] Forum Energy Technologies 6 7 000 2.1 — — 70 — — TA60[17 ] Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率 国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
Some considerations on an underwater robotic manipulator subjected to the environmental disturbances caused by water current
1
2016
... 相较于工业机械臂,水下机械手的工作环境更为严苛,设计时不仅要满足工程上的载重、出力等指标,而且需要考虑密封、低温、高压等问题. 同时,机械手在运动过程中与水存在相互作用. 具体而言,机械手在工作时不仅需要克服自身重力和负载,而且会受到惯性水动力和黏性水动力的显著影响. 这些水动力因素增加了系统的控制难度,并对机械手的作业路径跟踪造成干扰,导致工作精度下降[7 -8 ] . 另外,水流的变化、湍流的影响导致水动力作用呈现非线性、不确定性等特性,机械手的动力学模型往往难以完全反映其在实际工况下的行为. 在动态变化的环境中,机械手未能实现自主智能化,仍须人工干预. 此外,当采集珊瑚礁等脆弱的样本时,刚性末端执行器难以操作,而且容易对操作对象造成损坏. 当水下机械手与人交互协作时,大功率的刚性执行器也存在一定的安全隐患. 因此,具有高度柔顺性、能够根据周围环境变形的软体执行器成为了应对海洋勘探、采样相关挑战的解决方案. ...
Dynamic modeling and adaptive fuzzy sliding mode control for multi-link underwater manipulators
1
2019
... 相较于工业机械臂,水下机械手的工作环境更为严苛,设计时不仅要满足工程上的载重、出力等指标,而且需要考虑密封、低温、高压等问题. 同时,机械手在运动过程中与水存在相互作用. 具体而言,机械手在工作时不仅需要克服自身重力和负载,而且会受到惯性水动力和黏性水动力的显著影响. 这些水动力因素增加了系统的控制难度,并对机械手的作业路径跟踪造成干扰,导致工作精度下降[7 -8 ] . 另外,水流的变化、湍流的影响导致水动力作用呈现非线性、不确定性等特性,机械手的动力学模型往往难以完全反映其在实际工况下的行为. 在动态变化的环境中,机械手未能实现自主智能化,仍须人工干预. 此外,当采集珊瑚礁等脆弱的样本时,刚性末端执行器难以操作,而且容易对操作对象造成损坏. 当水下机械手与人交互协作时,大功率的刚性执行器也存在一定的安全隐患. 因此,具有高度柔顺性、能够根据周围环境变形的软体执行器成为了应对海洋勘探、采样相关挑战的解决方案. ...
1
... 1960年,Anderson设计了第一台水下机械手-远程水下操纵器RUM,被用于海洋科学研究[9 ] . 水下机械手类似于工业机械臂,是一种串联机械结构,其发展历程如图2 所示. 依据驱动方式的不同,可以分为液压驱动和电驱动的水下机械手. 早期的水下机械手大多是液压油驱动的;也有一些利用水液压驱动,优点是黏度低、功率密度高、不燃、无污染,然而这种方法因腐蚀、润滑和密封问题以及不合适的工作温度等缺点被逐渐放弃[10 ] . 因此,现有的商用水下机械手和科研机构开发的原型水下机械手都采用液压油或电驱动方式. 另外,根据作业需求,水下机械手都必须满足工作半径、提升能力等相关要求,须具备轻质结构、集成模块、高精度、低耦合干扰等设计特性. ...
面向水下作业的水液压机械手研究与展望
1
2023
... 1960年,Anderson设计了第一台水下机械手-远程水下操纵器RUM,被用于海洋科学研究[9 ] . 水下机械手类似于工业机械臂,是一种串联机械结构,其发展历程如图2 所示. 依据驱动方式的不同,可以分为液压驱动和电驱动的水下机械手. 早期的水下机械手大多是液压油驱动的;也有一些利用水液压驱动,优点是黏度低、功率密度高、不燃、无污染,然而这种方法因腐蚀、润滑和密封问题以及不合适的工作温度等缺点被逐渐放弃[10 ] . 因此,现有的商用水下机械手和科研机构开发的原型水下机械手都采用液压油或电驱动方式. 另外,根据作业需求,水下机械手都必须满足工作半径、提升能力等相关要求,须具备轻质结构、集成模块、高精度、低耦合干扰等设计特性. ...
面向水下作业的水液压机械手研究与展望
1
2023
... 1960年,Anderson设计了第一台水下机械手-远程水下操纵器RUM,被用于海洋科学研究[9 ] . 水下机械手类似于工业机械臂,是一种串联机械结构,其发展历程如图2 所示. 依据驱动方式的不同,可以分为液压驱动和电驱动的水下机械手. 早期的水下机械手大多是液压油驱动的;也有一些利用水液压驱动,优点是黏度低、功率密度高、不燃、无污染,然而这种方法因腐蚀、润滑和密封问题以及不合适的工作温度等缺点被逐渐放弃[10 ] . 因此,现有的商用水下机械手和科研机构开发的原型水下机械手都采用液压油或电驱动方式. 另外,根据作业需求,水下机械手都必须满足工作半径、提升能力等相关要求,须具备轻质结构、集成模块、高精度、低耦合干扰等设计特性. ...
For safe and compliant interaction: an outlook of soft underwater manipulators
1
2021
... 液压水下机械手基于液压驱动技术,将液压泵的压力能通过直动缸、摆动缸等执行机构转化为机械能. 液压机械手是目前技术成熟度最高、应用最为广泛且实用的水下机械手,具有高效率、高功率尺寸比、较强的承载能力、液压系统不易受海水影响、结构紧凑以及内置过载保护等优点[11 ] . ...
1
... 1964年,美国伍兹霍尔海洋研究所为Alvin号载人潜水器设计了世界第一台水下液压机械手,采用轻质钛合金材料,伸展距离为1.75 m,可以抓举100 kg的物体,最大夹紧力矩为40 N·m,同时配有摄像机和传感器[12 ] . 国内最早的液压机械手是1985年中科院沈阳自动化研究所崔殿忠等为水下机器人HR01号设计的五轴六功能液压机械手[13 ] . 该机械手由上手、前手、手腕、指爪4个部分组成,质量为100 kg,伸展距离可以达到0.8 m,能抓举5 kg的物体,并采用主从控制方式,在手爪上配备10个接触传感器,用于识别抓取信息. ...
2
... 1964年,美国伍兹霍尔海洋研究所为Alvin号载人潜水器设计了世界第一台水下液压机械手,采用轻质钛合金材料,伸展距离为1.75 m,可以抓举100 kg的物体,最大夹紧力矩为40 N·m,同时配有摄像机和传感器[12 ] . 国内最早的液压机械手是1985年中科院沈阳自动化研究所崔殿忠等为水下机器人HR01号设计的五轴六功能液压机械手[13 ] . 该机械手由上手、前手、手腕、指爪4个部分组成,质量为100 kg,伸展距离可以达到0.8 m,能抓举5 kg的物体,并采用主从控制方式,在手爪上配备10个接触传感器,用于识别抓取信息. ...
... Parameters of domestic prototype hydraulic manipulators
Tab.2 液压机械手名称 研发单位 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 HR01号机械手[13 ] 沈阳自动化研究所 5 200 0.8 100 — 5 — 主从 七功能液压机械手[23 ] 浙江大学 6 7 000 2.1 <100 <75 70 180 主从 七功能主从伺服液压机械手[24 ] 沈阳自动化研究所 6 7 000 1.9 — — 65 — 主从/伺服 华海-6H[25 ] 华中科技大学 5 1 500 1.37 65 — 100 — 主从 小型液压机械手[26 ] 浙江大学 6 — 1 — — 100 — — 七功能液压机械手[26 ] 浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从
液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
2
... 1964年,美国伍兹霍尔海洋研究所为Alvin号载人潜水器设计了世界第一台水下液压机械手,采用轻质钛合金材料,伸展距离为1.75 m,可以抓举100 kg的物体,最大夹紧力矩为40 N·m,同时配有摄像机和传感器[12 ] . 国内最早的液压机械手是1985年中科院沈阳自动化研究所崔殿忠等为水下机器人HR01号设计的五轴六功能液压机械手[13 ] . 该机械手由上手、前手、手腕、指爪4个部分组成,质量为100 kg,伸展距离可以达到0.8 m,能抓举5 kg的物体,并采用主从控制方式,在手爪上配备10个接触传感器,用于识别抓取信息. ...
... Parameters of domestic prototype hydraulic manipulators
Tab.2 液压机械手名称 研发单位 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 HR01号机械手[13 ] 沈阳自动化研究所 5 200 0.8 100 — 5 — 主从 七功能液压机械手[23 ] 浙江大学 6 7 000 2.1 <100 <75 70 180 主从 七功能主从伺服液压机械手[24 ] 沈阳自动化研究所 6 7 000 1.9 — — 65 — 主从/伺服 华海-6H[25 ] 华中科技大学 5 1 500 1.37 65 — 100 — 主从 小型液压机械手[26 ] 浙江大学 6 — 1 — — 100 — — 七功能液压机械手[26 ] 浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从
液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
5
... 国外对液压水下机械手的研究较早,技术成熟. 现有商用水下机械手的参数归纳于表1 . 美国Schilling Robotics公司的Titan 4水下机械手在兼顾精确性和灵巧性的同时,能够在水下7000 m工作,最大工作半径为1 922 mm. 该机械手的提升质量比较大,在空气中质量仅为100 kg,能够抓举的重物的最大质量为454 kg,但是其采用位置控制方式,控制精度会因操作员视线受阻而降低[14 ] . 为了使操作员能够更加精确地控制机械手,美国Kratf TeleRobotics公司在Grips、Raptor等机械手的主从式位置控制方式的基础上加入力反馈,将机械臂末端的受力情况实时反馈给操作员,以实现更精确的控制[15 ] . 英国Hydro-Lek公司的HLK系列产品致力于液压机械手的轻量化,机械手本体主要采用高密度聚乙烯材料,降低了其与水下航行器之间运动耦合以及浮力矩的干扰作用. 其中HLK-43000在空气中的质量仅为8.4 kg,在海水中为4.2 kg,但是能够抓举10 kg的物体[16 ] . ...
... Parameters of existing foreign commercial hydraulic manipulators
Tab.1 液压机械手名称 研发公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 MK37[6 ] Western Space and Marine 6 11 000 0.94 43 16 23 — 力反馈 The ARM[6 ] Western Space and Marine 6 11 000 1.7 145 97 45.4 — 力反馈 Titan 4[14 ] Schilling Robotics 6 4 000 1.922 100 78 122 170 位置 Atlas 7P/7R[14 ] Schilling Robotics 6 6 500 1.675 73 50 250 205 速率 Orion 7P/7R[14 ] Schilling Robotics 6 6 500 2.013 54 38 68 205 位置/速率 Orion 4R[14 ] Schilling Robotics 3 6 500 2.013 64 48 181 205 速率 Grips[15 ] Kratf TeleRobotics 6 3 000 1.289 59 41 82 20 主从+力反馈 Raptor[15 ] Kratf TeleRobotics 6 3 000 1.639 75 44 227 135 主从+力反馈 Predator[15 ] Kratf TeleRobotics 6 3 000 2.013 80 51 227 135 主从+力反馈 HLK-43000 [16 ] Hydro-Lek 5 3 000 0.66 8.4 4.2 10 8.2 速率 HLK-5300 [16 ] Hydro-Lek 6 6 000 1.428 36 20.2 32 60 速率 TA40[17 ] Forum Energy Technologies 6 7 000 2.1 — — 70 — — TA60[17 ] Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率
国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
... [
14 ]
Schilling Robotics 6 6 500 1.675 73 50 250 205 速率 Orion 7P/7R[14 ] Schilling Robotics 6 6 500 2.013 54 38 68 205 位置/速率 Orion 4R[14 ] Schilling Robotics 3 6 500 2.013 64 48 181 205 速率 Grips[15 ] Kratf TeleRobotics 6 3 000 1.289 59 41 82 20 主从+力反馈 Raptor[15 ] Kratf TeleRobotics 6 3 000 1.639 75 44 227 135 主从+力反馈 Predator[15 ] Kratf TeleRobotics 6 3 000 2.013 80 51 227 135 主从+力反馈 HLK-43000 [16 ] Hydro-Lek 5 3 000 0.66 8.4 4.2 10 8.2 速率 HLK-5300 [16 ] Hydro-Lek 6 6 000 1.428 36 20.2 32 60 速率 TA40[17 ] Forum Energy Technologies 6 7 000 2.1 — — 70 — — TA60[17 ] Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率 国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
... [
14 ]
Schilling Robotics 6 6 500 2.013 54 38 68 205 位置/速率 Orion 4R[14 ] Schilling Robotics 3 6 500 2.013 64 48 181 205 速率 Grips[15 ] Kratf TeleRobotics 6 3 000 1.289 59 41 82 20 主从+力反馈 Raptor[15 ] Kratf TeleRobotics 6 3 000 1.639 75 44 227 135 主从+力反馈 Predator[15 ] Kratf TeleRobotics 6 3 000 2.013 80 51 227 135 主从+力反馈 HLK-43000 [16 ] Hydro-Lek 5 3 000 0.66 8.4 4.2 10 8.2 速率 HLK-5300 [16 ] Hydro-Lek 6 6 000 1.428 36 20.2 32 60 速率 TA40[17 ] Forum Energy Technologies 6 7 000 2.1 — — 70 — — TA60[17 ] Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率 国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
... [
14 ]
Schilling Robotics 3 6 500 2.013 64 48 181 205 速率 Grips[15 ] Kratf TeleRobotics 6 3 000 1.289 59 41 82 20 主从+力反馈 Raptor[15 ] Kratf TeleRobotics 6 3 000 1.639 75 44 227 135 主从+力反馈 Predator[15 ] Kratf TeleRobotics 6 3 000 2.013 80 51 227 135 主从+力反馈 HLK-43000 [16 ] Hydro-Lek 5 3 000 0.66 8.4 4.2 10 8.2 速率 HLK-5300 [16 ] Hydro-Lek 6 6 000 1.428 36 20.2 32 60 速率 TA40[17 ] Forum Energy Technologies 6 7 000 2.1 — — 70 — — TA60[17 ] Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率 国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
4
... 国外对液压水下机械手的研究较早,技术成熟. 现有商用水下机械手的参数归纳于表1 . 美国Schilling Robotics公司的Titan 4水下机械手在兼顾精确性和灵巧性的同时,能够在水下7000 m工作,最大工作半径为1 922 mm. 该机械手的提升质量比较大,在空气中质量仅为100 kg,能够抓举的重物的最大质量为454 kg,但是其采用位置控制方式,控制精度会因操作员视线受阻而降低[14 ] . 为了使操作员能够更加精确地控制机械手,美国Kratf TeleRobotics公司在Grips、Raptor等机械手的主从式位置控制方式的基础上加入力反馈,将机械臂末端的受力情况实时反馈给操作员,以实现更精确的控制[15 ] . 英国Hydro-Lek公司的HLK系列产品致力于液压机械手的轻量化,机械手本体主要采用高密度聚乙烯材料,降低了其与水下航行器之间运动耦合以及浮力矩的干扰作用. 其中HLK-43000在空气中的质量仅为8.4 kg,在海水中为4.2 kg,但是能够抓举10 kg的物体[16 ] . ...
... Parameters of existing foreign commercial hydraulic manipulators
Tab.1 液压机械手名称 研发公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 MK37[6 ] Western Space and Marine 6 11 000 0.94 43 16 23 — 力反馈 The ARM[6 ] Western Space and Marine 6 11 000 1.7 145 97 45.4 — 力反馈 Titan 4[14 ] Schilling Robotics 6 4 000 1.922 100 78 122 170 位置 Atlas 7P/7R[14 ] Schilling Robotics 6 6 500 1.675 73 50 250 205 速率 Orion 7P/7R[14 ] Schilling Robotics 6 6 500 2.013 54 38 68 205 位置/速率 Orion 4R[14 ] Schilling Robotics 3 6 500 2.013 64 48 181 205 速率 Grips[15 ] Kratf TeleRobotics 6 3 000 1.289 59 41 82 20 主从+力反馈 Raptor[15 ] Kratf TeleRobotics 6 3 000 1.639 75 44 227 135 主从+力反馈 Predator[15 ] Kratf TeleRobotics 6 3 000 2.013 80 51 227 135 主从+力反馈 HLK-43000 [16 ] Hydro-Lek 5 3 000 0.66 8.4 4.2 10 8.2 速率 HLK-5300 [16 ] Hydro-Lek 6 6 000 1.428 36 20.2 32 60 速率 TA40[17 ] Forum Energy Technologies 6 7 000 2.1 — — 70 — — TA60[17 ] Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率
国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
... [
15 ]
Kratf TeleRobotics 6 3 000 1.639 75 44 227 135 主从+力反馈 Predator[15 ] Kratf TeleRobotics 6 3 000 2.013 80 51 227 135 主从+力反馈 HLK-43000 [16 ] Hydro-Lek 5 3 000 0.66 8.4 4.2 10 8.2 速率 HLK-5300 [16 ] Hydro-Lek 6 6 000 1.428 36 20.2 32 60 速率 TA40[17 ] Forum Energy Technologies 6 7 000 2.1 — — 70 — — TA60[17 ] Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率 国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
... [
15 ]
Kratf TeleRobotics 6 3 000 2.013 80 51 227 135 主从+力反馈 HLK-43000 [16 ] Hydro-Lek 5 3 000 0.66 8.4 4.2 10 8.2 速率 HLK-5300 [16 ] Hydro-Lek 6 6 000 1.428 36 20.2 32 60 速率 TA40[17 ] Forum Energy Technologies 6 7 000 2.1 — — 70 — — TA60[17 ] Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率 国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
3
... 国外对液压水下机械手的研究较早,技术成熟. 现有商用水下机械手的参数归纳于表1 . 美国Schilling Robotics公司的Titan 4水下机械手在兼顾精确性和灵巧性的同时,能够在水下7000 m工作,最大工作半径为1 922 mm. 该机械手的提升质量比较大,在空气中质量仅为100 kg,能够抓举的重物的最大质量为454 kg,但是其采用位置控制方式,控制精度会因操作员视线受阻而降低[14 ] . 为了使操作员能够更加精确地控制机械手,美国Kratf TeleRobotics公司在Grips、Raptor等机械手的主从式位置控制方式的基础上加入力反馈,将机械臂末端的受力情况实时反馈给操作员,以实现更精确的控制[15 ] . 英国Hydro-Lek公司的HLK系列产品致力于液压机械手的轻量化,机械手本体主要采用高密度聚乙烯材料,降低了其与水下航行器之间运动耦合以及浮力矩的干扰作用. 其中HLK-43000在空气中的质量仅为8.4 kg,在海水中为4.2 kg,但是能够抓举10 kg的物体[16 ] . ...
... Parameters of existing foreign commercial hydraulic manipulators
Tab.1 液压机械手名称 研发公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 MK37[6 ] Western Space and Marine 6 11 000 0.94 43 16 23 — 力反馈 The ARM[6 ] Western Space and Marine 6 11 000 1.7 145 97 45.4 — 力反馈 Titan 4[14 ] Schilling Robotics 6 4 000 1.922 100 78 122 170 位置 Atlas 7P/7R[14 ] Schilling Robotics 6 6 500 1.675 73 50 250 205 速率 Orion 7P/7R[14 ] Schilling Robotics 6 6 500 2.013 54 38 68 205 位置/速率 Orion 4R[14 ] Schilling Robotics 3 6 500 2.013 64 48 181 205 速率 Grips[15 ] Kratf TeleRobotics 6 3 000 1.289 59 41 82 20 主从+力反馈 Raptor[15 ] Kratf TeleRobotics 6 3 000 1.639 75 44 227 135 主从+力反馈 Predator[15 ] Kratf TeleRobotics 6 3 000 2.013 80 51 227 135 主从+力反馈 HLK-43000 [16 ] Hydro-Lek 5 3 000 0.66 8.4 4.2 10 8.2 速率 HLK-5300 [16 ] Hydro-Lek 6 6 000 1.428 36 20.2 32 60 速率 TA40[17 ] Forum Energy Technologies 6 7 000 2.1 — — 70 — — TA60[17 ] Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率
国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
... [
16 ]
Hydro-Lek 6 6 000 1.428 36 20.2 32 60 速率 TA40[17 ] Forum Energy Technologies 6 7 000 2.1 — — 70 — — TA60[17 ] Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率 国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
2
... Parameters of existing foreign commercial hydraulic manipulators
Tab.1 液压机械手名称 研发公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 MK37[6 ] Western Space and Marine 6 11 000 0.94 43 16 23 — 力反馈 The ARM[6 ] Western Space and Marine 6 11 000 1.7 145 97 45.4 — 力反馈 Titan 4[14 ] Schilling Robotics 6 4 000 1.922 100 78 122 170 位置 Atlas 7P/7R[14 ] Schilling Robotics 6 6 500 1.675 73 50 250 205 速率 Orion 7P/7R[14 ] Schilling Robotics 6 6 500 2.013 54 38 68 205 位置/速率 Orion 4R[14 ] Schilling Robotics 3 6 500 2.013 64 48 181 205 速率 Grips[15 ] Kratf TeleRobotics 6 3 000 1.289 59 41 82 20 主从+力反馈 Raptor[15 ] Kratf TeleRobotics 6 3 000 1.639 75 44 227 135 主从+力反馈 Predator[15 ] Kratf TeleRobotics 6 3 000 2.013 80 51 227 135 主从+力反馈 HLK-43000 [16 ] Hydro-Lek 5 3 000 0.66 8.4 4.2 10 8.2 速率 HLK-5300 [16 ] Hydro-Lek 6 6 000 1.428 36 20.2 32 60 速率 TA40[17 ] Forum Energy Technologies 6 7 000 2.1 — — 70 — — TA60[17 ] Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率
国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
... [
17 ]
Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率 国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
1
... Parameters of existing foreign commercial hydraulic manipulators
Tab.1 液压机械手名称 研发公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 MK37[6 ] Western Space and Marine 6 11 000 0.94 43 16 23 — 力反馈 The ARM[6 ] Western Space and Marine 6 11 000 1.7 145 97 45.4 — 力反馈 Titan 4[14 ] Schilling Robotics 6 4 000 1.922 100 78 122 170 位置 Atlas 7P/7R[14 ] Schilling Robotics 6 6 500 1.675 73 50 250 205 速率 Orion 7P/7R[14 ] Schilling Robotics 6 6 500 2.013 54 38 68 205 位置/速率 Orion 4R[14 ] Schilling Robotics 3 6 500 2.013 64 48 181 205 速率 Grips[15 ] Kratf TeleRobotics 6 3 000 1.289 59 41 82 20 主从+力反馈 Raptor[15 ] Kratf TeleRobotics 6 3 000 1.639 75 44 227 135 主从+力反馈 Predator[15 ] Kratf TeleRobotics 6 3 000 2.013 80 51 227 135 主从+力反馈 HLK-43000 [16 ] Hydro-Lek 5 3 000 0.66 8.4 4.2 10 8.2 速率 HLK-5300 [16 ] Hydro-Lek 6 6 000 1.428 36 20.2 32 60 速率 TA40[17 ] Forum Energy Technologies 6 7 000 2.1 — — 70 — — TA60[17 ] Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率
国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
1
... Parameters of existing foreign commercial hydraulic manipulators
Tab.1 液压机械手名称 研发公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 MK37[6 ] Western Space and Marine 6 11 000 0.94 43 16 23 — 力反馈 The ARM[6 ] Western Space and Marine 6 11 000 1.7 145 97 45.4 — 力反馈 Titan 4[14 ] Schilling Robotics 6 4 000 1.922 100 78 122 170 位置 Atlas 7P/7R[14 ] Schilling Robotics 6 6 500 1.675 73 50 250 205 速率 Orion 7P/7R[14 ] Schilling Robotics 6 6 500 2.013 54 38 68 205 位置/速率 Orion 4R[14 ] Schilling Robotics 3 6 500 2.013 64 48 181 205 速率 Grips[15 ] Kratf TeleRobotics 6 3 000 1.289 59 41 82 20 主从+力反馈 Raptor[15 ] Kratf TeleRobotics 6 3 000 1.639 75 44 227 135 主从+力反馈 Predator[15 ] Kratf TeleRobotics 6 3 000 2.013 80 51 227 135 主从+力反馈 HLK-43000 [16 ] Hydro-Lek 5 3 000 0.66 8.4 4.2 10 8.2 速率 HLK-5300 [16 ] Hydro-Lek 6 6 000 1.428 36 20.2 32 60 速率 TA40[17 ] Forum Energy Technologies 6 7 000 2.1 — — 70 — — TA60[17 ] Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率
国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
1
... Parameters of existing foreign commercial hydraulic manipulators
Tab.1 液压机械手名称 研发公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 MK37[6 ] Western Space and Marine 6 11 000 0.94 43 16 23 — 力反馈 The ARM[6 ] Western Space and Marine 6 11 000 1.7 145 97 45.4 — 力反馈 Titan 4[14 ] Schilling Robotics 6 4 000 1.922 100 78 122 170 位置 Atlas 7P/7R[14 ] Schilling Robotics 6 6 500 1.675 73 50 250 205 速率 Orion 7P/7R[14 ] Schilling Robotics 6 6 500 2.013 54 38 68 205 位置/速率 Orion 4R[14 ] Schilling Robotics 3 6 500 2.013 64 48 181 205 速率 Grips[15 ] Kratf TeleRobotics 6 3 000 1.289 59 41 82 20 主从+力反馈 Raptor[15 ] Kratf TeleRobotics 6 3 000 1.639 75 44 227 135 主从+力反馈 Predator[15 ] Kratf TeleRobotics 6 3 000 2.013 80 51 227 135 主从+力反馈 HLK-43000 [16 ] Hydro-Lek 5 3 000 0.66 8.4 4.2 10 8.2 速率 HLK-5300 [16 ] Hydro-Lek 6 6 000 1.428 36 20.2 32 60 速率 TA40[17 ] Forum Energy Technologies 6 7 000 2.1 — — 70 — — TA60[17 ] Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率
国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
3
... Parameters of existing foreign commercial hydraulic manipulators
Tab.1 液压机械手名称 研发公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 MK37[6 ] Western Space and Marine 6 11 000 0.94 43 16 23 — 力反馈 The ARM[6 ] Western Space and Marine 6 11 000 1.7 145 97 45.4 — 力反馈 Titan 4[14 ] Schilling Robotics 6 4 000 1.922 100 78 122 170 位置 Atlas 7P/7R[14 ] Schilling Robotics 6 6 500 1.675 73 50 250 205 速率 Orion 7P/7R[14 ] Schilling Robotics 6 6 500 2.013 54 38 68 205 位置/速率 Orion 4R[14 ] Schilling Robotics 3 6 500 2.013 64 48 181 205 速率 Grips[15 ] Kratf TeleRobotics 6 3 000 1.289 59 41 82 20 主从+力反馈 Raptor[15 ] Kratf TeleRobotics 6 3 000 1.639 75 44 227 135 主从+力反馈 Predator[15 ] Kratf TeleRobotics 6 3 000 2.013 80 51 227 135 主从+力反馈 HLK-43000 [16 ] Hydro-Lek 5 3 000 0.66 8.4 4.2 10 8.2 速率 HLK-5300 [16 ] Hydro-Lek 6 6 000 1.428 36 20.2 32 60 速率 TA40[17 ] Forum Energy Technologies 6 7 000 2.1 — — 70 — — TA60[17 ] Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率
国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
... [
21 ]
Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率 国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
... [
21 ]
Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率 国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
3
... Parameters of existing foreign commercial hydraulic manipulators
Tab.1 液压机械手名称 研发公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 MK37[6 ] Western Space and Marine 6 11 000 0.94 43 16 23 — 力反馈 The ARM[6 ] Western Space and Marine 6 11 000 1.7 145 97 45.4 — 力反馈 Titan 4[14 ] Schilling Robotics 6 4 000 1.922 100 78 122 170 位置 Atlas 7P/7R[14 ] Schilling Robotics 6 6 500 1.675 73 50 250 205 速率 Orion 7P/7R[14 ] Schilling Robotics 6 6 500 2.013 54 38 68 205 位置/速率 Orion 4R[14 ] Schilling Robotics 3 6 500 2.013 64 48 181 205 速率 Grips[15 ] Kratf TeleRobotics 6 3 000 1.289 59 41 82 20 主从+力反馈 Raptor[15 ] Kratf TeleRobotics 6 3 000 1.639 75 44 227 135 主从+力反馈 Predator[15 ] Kratf TeleRobotics 6 3 000 2.013 80 51 227 135 主从+力反馈 HLK-43000 [16 ] Hydro-Lek 5 3 000 0.66 8.4 4.2 10 8.2 速率 HLK-5300 [16 ] Hydro-Lek 6 6 000 1.428 36 20.2 32 60 速率 TA40[17 ] Forum Energy Technologies 6 7 000 2.1 — — 70 — — TA60[17 ] Forum Energy Technologies 4 — 1.41 78 56 380 250 — HYDRA UW3[18 ] KNR Systems Inc. 6 2 500 2.17 — — 300 — 位置 Atlas Hybrid[19 ] Oceaneering 6 6 500 1.66 73 50 65 205 位置/速率 7F-HARM[20 ] Seamor Marine Ltd. 6 600 1.07 3 — — — — G501[21 ] Envirex 4 3 000 0.8 15 13 100 80 速率 M501[21 ] Envirex 4 3 000 0.95 14 11 50 45 速率 M701[21 ] Envirex 6 3 000 1.2 17 14 50 30 速率 Magnum-5Mini[22 ] ISE 4 6 000 0.71 13 — 68 14 速率 Magnum-6Mini[22 ] ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率
国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
... [
22 ]
ISE 5 6 000 0.96 63 — 454 108 速率 Magnum-7[22 ] ISE 6 6 000 1.5 71 — 454 108 位置/速率 国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
... [
22 ]
ISE 6 6 000 1.5 71 — 454 108 位置/速率 国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
2
... 国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
... Parameters of domestic prototype hydraulic manipulators
Tab.2 液压机械手名称 研发单位 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 HR01号机械手[13 ] 沈阳自动化研究所 5 200 0.8 100 — 5 — 主从 七功能液压机械手[23 ] 浙江大学 6 7 000 2.1 <100 <75 70 180 主从 七功能主从伺服液压机械手[24 ] 沈阳自动化研究所 6 7 000 1.9 — — 65 — 主从/伺服 华海-6H[25 ] 华中科技大学 5 1 500 1.37 65 — 100 — 主从 小型液压机械手[26 ] 浙江大学 6 — 1 — — 100 — — 七功能液压机械手[26 ] 浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从
液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
2
... 国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
... Parameters of domestic prototype hydraulic manipulators
Tab.2 液压机械手名称 研发单位 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 HR01号机械手[13 ] 沈阳自动化研究所 5 200 0.8 100 — 5 — 主从 七功能液压机械手[23 ] 浙江大学 6 7 000 2.1 <100 <75 70 180 主从 七功能主从伺服液压机械手[24 ] 沈阳自动化研究所 6 7 000 1.9 — — 65 — 主从/伺服 华海-6H[25 ] 华中科技大学 5 1 500 1.37 65 — 100 — 主从 小型液压机械手[26 ] 浙江大学 6 — 1 — — 100 — — 七功能液压机械手[26 ] 浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从
液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
2
... 国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
... Parameters of domestic prototype hydraulic manipulators
Tab.2 液压机械手名称 研发单位 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 HR01号机械手[13 ] 沈阳自动化研究所 5 200 0.8 100 — 5 — 主从 七功能液压机械手[23 ] 浙江大学 6 7 000 2.1 <100 <75 70 180 主从 七功能主从伺服液压机械手[24 ] 沈阳自动化研究所 6 7 000 1.9 — — 65 — 主从/伺服 华海-6H[25 ] 华中科技大学 5 1 500 1.37 65 — 100 — 主从 小型液压机械手[26 ] 浙江大学 6 — 1 — — 100 — — 七功能液压机械手[26 ] 浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从
液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
2
... 国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
... Parameters of domestic prototype hydraulic manipulators
Tab.2 液压机械手名称 研发单位 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 HR01号机械手[13 ] 沈阳自动化研究所 5 200 0.8 100 — 5 — 主从 七功能液压机械手[23 ] 浙江大学 6 7 000 2.1 <100 <75 70 180 主从 七功能主从伺服液压机械手[24 ] 沈阳自动化研究所 6 7 000 1.9 — — 65 — 主从/伺服 华海-6H[25 ] 华中科技大学 5 1 500 1.37 65 — 100 — 主从 小型液压机械手[26 ] 浙江大学 6 — 1 — — 100 — — 七功能液压机械手[26 ] 浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从
液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
2
... 国内技术相对落后、不够成熟,液压机械手的研究集中于浙江大学、中科院沈阳自动化研究所等科研单位研发的原型机械手. 表2 归纳了国内主要的原型机械手. “十五”期间,浙江大学研制用于7000 m海底作业的七功能液压机械手,采用主从式闭环位置控制,可以在2.1 m工作半径内进行水下科考、打捞、检修等任务;同时,各关节处安装有角度传感器,以实时监测关节角度和手臂姿态[23 ] . “十二五”期间,沈阳自动化研究所研发七功能主从伺服液压机械手,设计水深为7000 m,最大伸长距离为1.9 m,可以抓举65 kg的物体. 该机械手被部署于发现号ROV上,并在1100 m深的冷泉区完成了样品采集、回收及采样器触发等科研任务[24 ] . 华中科技大学针对国家课题“机械手模拟检测及油气应急处置模拟训练”研制油气开发水下机械手“华海-6H”,其具有5个自由度,由肩部、大臂、肘部、腕部和末端执行器组成,可以实现1500 m深水环境作业[25 ] . ...
... Parameters of domestic prototype hydraulic manipulators
Tab.2 液压机械手名称 研发单位 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 HR01号机械手[13 ] 沈阳自动化研究所 5 200 0.8 100 — 5 — 主从 七功能液压机械手[23 ] 浙江大学 6 7 000 2.1 <100 <75 70 180 主从 七功能主从伺服液压机械手[24 ] 沈阳自动化研究所 6 7 000 1.9 — — 65 — 主从/伺服 华海-6H[25 ] 华中科技大学 5 1 500 1.37 65 — 100 — 主从 小型液压机械手[26 ] 浙江大学 6 — 1 — — 100 — — 七功能液压机械手[26 ] 浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从
液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
2
... Parameters of domestic prototype hydraulic manipulators
Tab.2 液压机械手名称 研发单位 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 HR01号机械手[13 ] 沈阳自动化研究所 5 200 0.8 100 — 5 — 主从 七功能液压机械手[23 ] 浙江大学 6 7 000 2.1 <100 <75 70 180 主从 七功能主从伺服液压机械手[24 ] 沈阳自动化研究所 6 7 000 1.9 — — 65 — 主从/伺服 华海-6H[25 ] 华中科技大学 5 1 500 1.37 65 — 100 — 主从 小型液压机械手[26 ] 浙江大学 6 — 1 — — 100 — — 七功能液压机械手[26 ] 浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从
液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
... [
26 ]
浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从 液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
2
... Parameters of domestic prototype hydraulic manipulators
Tab.2 液压机械手名称 研发单位 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 HR01号机械手[13 ] 沈阳自动化研究所 5 200 0.8 100 — 5 — 主从 七功能液压机械手[23 ] 浙江大学 6 7 000 2.1 <100 <75 70 180 主从 七功能主从伺服液压机械手[24 ] 沈阳自动化研究所 6 7 000 1.9 — — 65 — 主从/伺服 华海-6H[25 ] 华中科技大学 5 1 500 1.37 65 — 100 — 主从 小型液压机械手[26 ] 浙江大学 6 — 1 — — 100 — — 七功能液压机械手[26 ] 浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从
液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
... [
26 ]
浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从 液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
“鱼鹰”号载人潜器打捞机械手的研制
1
1990
... Parameters of domestic prototype hydraulic manipulators
Tab.2 液压机械手名称 研发单位 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 HR01号机械手[13 ] 沈阳自动化研究所 5 200 0.8 100 — 5 — 主从 七功能液压机械手[23 ] 浙江大学 6 7 000 2.1 <100 <75 70 180 主从 七功能主从伺服液压机械手[24 ] 沈阳自动化研究所 6 7 000 1.9 — — 65 — 主从/伺服 华海-6H[25 ] 华中科技大学 5 1 500 1.37 65 — 100 — 主从 小型液压机械手[26 ] 浙江大学 6 — 1 — — 100 — — 七功能液压机械手[26 ] 浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从
液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
“鱼鹰”号载人潜器打捞机械手的研制
1
1990
... Parameters of domestic prototype hydraulic manipulators
Tab.2 液压机械手名称 研发单位 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 HR01号机械手[13 ] 沈阳自动化研究所 5 200 0.8 100 — 5 — 主从 七功能液压机械手[23 ] 浙江大学 6 7 000 2.1 <100 <75 70 180 主从 七功能主从伺服液压机械手[24 ] 沈阳自动化研究所 6 7 000 1.9 — — 65 — 主从/伺服 华海-6H[25 ] 华中科技大学 5 1 500 1.37 65 — 100 — 主从 小型液压机械手[26 ] 浙江大学 6 — 1 — — 100 — — 七功能液压机械手[26 ] 浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从
液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
兰鲸号潜器两型机械手的结构设计研究
2
1998
... Parameters of domestic prototype hydraulic manipulators
Tab.2 液压机械手名称 研发单位 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 HR01号机械手[13 ] 沈阳自动化研究所 5 200 0.8 100 — 5 — 主从 七功能液压机械手[23 ] 浙江大学 6 7 000 2.1 <100 <75 70 180 主从 七功能主从伺服液压机械手[24 ] 沈阳自动化研究所 6 7 000 1.9 — — 65 — 主从/伺服 华海-6H[25 ] 华中科技大学 5 1 500 1.37 65 — 100 — 主从 小型液压机械手[26 ] 浙江大学 6 — 1 — — 100 — — 七功能液压机械手[26 ] 浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从
液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
... [
28 ]
华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从 液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
兰鲸号潜器两型机械手的结构设计研究
2
1998
... Parameters of domestic prototype hydraulic manipulators
Tab.2 液压机械手名称 研发单位 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 HR01号机械手[13 ] 沈阳自动化研究所 5 200 0.8 100 — 5 — 主从 七功能液压机械手[23 ] 浙江大学 6 7 000 2.1 <100 <75 70 180 主从 七功能主从伺服液压机械手[24 ] 沈阳自动化研究所 6 7 000 1.9 — — 65 — 主从/伺服 华海-6H[25 ] 华中科技大学 5 1 500 1.37 65 — 100 — 主从 小型液压机械手[26 ] 浙江大学 6 — 1 — — 100 — — 七功能液压机械手[26 ] 浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从
液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
... [
28 ]
华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从 液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
1
... Parameters of domestic prototype hydraulic manipulators
Tab.2 液压机械手名称 研发单位 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 HR01号机械手[13 ] 沈阳自动化研究所 5 200 0.8 100 — 5 — 主从 七功能液压机械手[23 ] 浙江大学 6 7 000 2.1 <100 <75 70 180 主从 七功能主从伺服液压机械手[24 ] 沈阳自动化研究所 6 7 000 1.9 — — 65 — 主从/伺服 华海-6H[25 ] 华中科技大学 5 1 500 1.37 65 — 100 — 主从 小型液压机械手[26 ] 浙江大学 6 — 1 — — 100 — — 七功能液压机械手[26 ] 浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从
液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
1
... Parameters of domestic prototype hydraulic manipulators
Tab.2 液压机械手名称 研发单位 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 HR01号机械手[13 ] 沈阳自动化研究所 5 200 0.8 100 — 5 — 主从 七功能液压机械手[23 ] 浙江大学 6 7 000 2.1 <100 <75 70 180 主从 七功能主从伺服液压机械手[24 ] 沈阳自动化研究所 6 7 000 1.9 — — 65 — 主从/伺服 华海-6H[25 ] 华中科技大学 5 1 500 1.37 65 — 100 — 主从 小型液压机械手[26 ] 浙江大学 6 — 1 — — 100 — — 七功能液压机械手[26 ] 浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从
液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
SIWR-Ⅱ水下作业机械手动力机构特性分析
1
1993
... Parameters of domestic prototype hydraulic manipulators
Tab.2 液压机械手名称 研发单位 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 HR01号机械手[13 ] 沈阳自动化研究所 5 200 0.8 100 — 5 — 主从 七功能液压机械手[23 ] 浙江大学 6 7 000 2.1 <100 <75 70 180 主从 七功能主从伺服液压机械手[24 ] 沈阳自动化研究所 6 7 000 1.9 — — 65 — 主从/伺服 华海-6H[25 ] 华中科技大学 5 1 500 1.37 65 — 100 — 主从 小型液压机械手[26 ] 浙江大学 6 — 1 — — 100 — — 七功能液压机械手[26 ] 浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从
液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
SIWR-Ⅱ水下作业机械手动力机构特性分析
1
1993
... Parameters of domestic prototype hydraulic manipulators
Tab.2 液压机械手名称 研发单位 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 HR01号机械手[13 ] 沈阳自动化研究所 5 200 0.8 100 — 5 — 主从 七功能液压机械手[23 ] 浙江大学 6 7 000 2.1 <100 <75 70 180 主从 七功能主从伺服液压机械手[24 ] 沈阳自动化研究所 6 7 000 1.9 — — 65 — 主从/伺服 华海-6H[25 ] 华中科技大学 5 1 500 1.37 65 — 100 — 主从 小型液压机械手[26 ] 浙江大学 6 — 1 — — 100 — — 七功能液压机械手[26 ] 浙江大学 6 4 500 1.6 45 — 100 — 主从 鱼鹰号机械手[27 ] 华中科技大学 3 — 2.805 — — 100 — 开关 蓝鲸号打捞机械手[28 ] 华中科技大学 3 — 2.803 440 — 150 — — 蓝鲸号作业机械手[28 ] 华中科技大学 6 — 2.3 120 — 32 — — 七功能水下机械手[29 ] 哈尔滨工程大学 6 — >1.6 70 54 — — 主从 SIWR-Ⅱ水下机械手[30 ] 哈尔滨工程大学 5 — 1.2 — — 20 — 主从
液压驱动的水下机械手技术成熟,被广泛应用于深海(3000 m以上)重载作业,但仍然面临诸多挑战. 首先,液压机械手普遍采用主从式控制,受高自重和大负载的影响,容易与水下航行器产生强运动耦合,导致定位精度差,即使加入力反馈或传感器也很难在接触任务中实现高精度的精细控制,因此需要具有更高精度和稳定性的控制系统. 其次,液压系统中摩擦、泄漏、流体可压缩性等非线性因素使得动力学建模与求解复杂化,须在动力学建模和控制系统的设计与实现过程中充分考虑外部扰动影响. 此外,液压机械手系统的质量和体积较大,如沈阳自动化研究所研制的主从伺服液压机械手系统包含机械手本体、阀箱、补偿器、管路等多个组件,不仅增加了水下航行器的负载压力,而且对操控稳定性和能耗提出了更高的要求. 同时,复杂的管线布置与固定的执行机构位置降低了系统的模块化水平,限制了其对不同任务的适应性和维护效率. 因此,对于液压水下机械手,未来仍须在轻量化、模块化设计及控制系统优化方面进行深入研究和创新. ...
Design and performance evaluation of an actively compliant underwater manipulator for full-ocean depth
2
1991
... 1991年,Yoerger等[31 ] 为伍兹霍尔海洋研究所的JASON号潜水器开发了最早的电动水下机械手,其具有3个自由度,在测试中完成了地中海下700 m处的文物打捞和3000 m深的水下试验. 1996年,华中科技大学团队设计了国内最早的电动机械手,该机械手具有2个自由度(大臂回转、小臂伸缩),伸展距离可以达到1.34 m,在试验中完成了爆炸剪缆作业[32 ] . ...
... Parameters of foreign electric manipulators
Tab.3 电动机械手名称 研发单位/公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 JASON manipulator[31 ] Deep Submergence Laboratory 3 3 000 — — — — — — AMADEUS manipulator[33 ] Ansaldo 7 500 — — — — — 速率 MARIS 7080 [34 ] Ansaldo 6 6 000 1.4 65 45 8 — 半自动 UMA-1500 [41 ] Graal Tech 6 1 500 2 28 14 10 — 位置 Poseidon[42 ] University of Liverpool 5 100 1 — 37 5 — PID SAMURAI[43 ] Space Systems Laboratory 6 6 000 — — — — 1.6 — Electromechanical [44 ] Tecnomare/Ansaldo 6 — 2 160 — 30 — 主从/力反馈 BE5-500[45 ] Ocean Innovation System 6 500 0.7 15 8 — 1.6 速率 Bravo 3[46 ] Reach Robotics 2 450 0.41 4 2.6 15 20 主从 X7[46 ] Reach Robotics 6 300 0.508 2.9 1.8 3 7 位置/速率 Arm 5E Micro[47 ] ECA 4 6 000 0.64 10 5 10 10 位置/速率 Arm 5E[47 ] ECA 4 6 000 1 27 18 25 25 位置/速率 Arm 7E[47 ] ECA 6 6 000 1.79 69 49.2 40 25 位置/速率
表 4 国内电动机械手相关参数 ...
自主式水下机械手系统研究
2
1996
... 1991年,Yoerger等[31 ] 为伍兹霍尔海洋研究所的JASON号潜水器开发了最早的电动水下机械手,其具有3个自由度,在测试中完成了地中海下700 m处的文物打捞和3000 m深的水下试验. 1996年,华中科技大学团队设计了国内最早的电动机械手,该机械手具有2个自由度(大臂回转、小臂伸缩),伸展距离可以达到1.34 m,在试验中完成了爆炸剪缆作业[32 ] . ...
... Parameters of domestic electric manipulators
Tab.4 电动机械手名称 研发单位/公司 自由度 作业深度/m 伸展距离/m 质量(空气)/kg 质量(水下)/kg 抓举能力/kg 腕关节力矩/(N·m) 控制方式 自主式水下机械手[32 ] 华中科技大学 2 70 1.34 12.5 — 12 — 智能 三功能水下机械手[37 ] 沈阳自动化研究所 2 — — — — — — — 华海-4E[38 ] 华中科技大学 4 3 500 1.3 <90 — 10 — — 水下电动机械手[39 ] 浙江大学 4 500 0.694 14.3 — — 31 — L20[40 ] 南京华研 5 300 1.2 45 36 — 10 主从 东麒M3[40 ] 南京华研 2 300 — 7.8 3.4 — 49 位置/速率 东麒S7[40 ] 南京华研 4 300 — 7.3 3.3 — — 位置/速率 HUST-8FSA[48 ] 华中科技大学 6 100 3 — — 150 — 主从 4自由度水下机械手[49 ] 哈尔滨工程大学 4 — 0.684 — — — — —
水下电动机械手在精度、响应速度、维护和环保方面具有显著优势,并且通过关节驱动模块化设计(电机+减速器+编码器),许多原型机的功能性和适应性得到了增强. 然而,在许多工业干预任务中,典型的电动机械手通常无法满足速度、强度或力的要求,这是电驱动技术的局限性导致的. 此外,在极端高压或低温的深海环境下工作时,电动机械手仍然需要压力平衡装置以保证其耐压性、防水性,这增加了系统重量和能耗. 因此,在电动机机械手未来的发展中,须弥补其模块化与轻量化技术在深海密封以及高功率密度上的不足. ...
自主式水下机械手系统研究
2
1996
... 1991年,Yoerger等[31 ] 为伍兹霍尔海洋研究所的JASON号潜水器开发了最早的电动水下机械手,其具有3个自由度,在测试中完成了地中海下700 m处的文物打捞和3000 m深的水下试验. 1996年,华中科技大学团队设计了国内最早的电动机械手,该机械手具有2个自由度(大臂回转、小臂伸缩),伸展距离可以达到1.34 m,在试验中完成了爆炸剪缆作业[32 ] . ...
... Parameters of domestic electric manipulators
Tab.4 电动机械手名称 研发单位/公司 自由度 作业深度/m 伸展距离/m 质量(空气)/kg 质量(水下)/kg 抓举能力/kg 腕关节力矩/(N·m) 控制方式 自主式水下机械手[32 ] 华中科技大学 2 70 1.34 12.5 — 12 — 智能 三功能水下机械手[37 ] 沈阳自动化研究所 2 — — — — — — — 华海-4E[38 ] 华中科技大学 4 3 500 1.3 <90 — 10 — — 水下电动机械手[39 ] 浙江大学 4 500 0.694 14.3 — — 31 — L20[40 ] 南京华研 5 300 1.2 45 36 — 10 主从 东麒M3[40 ] 南京华研 2 300 — 7.8 3.4 — 49 位置/速率 东麒S7[40 ] 南京华研 4 300 — 7.3 3.3 — — 位置/速率 HUST-8FSA[48 ] 华中科技大学 6 100 3 — — 150 — 主从 4自由度水下机械手[49 ] 哈尔滨工程大学 4 — 0.684 — — — — —
水下电动机械手在精度、响应速度、维护和环保方面具有显著优势,并且通过关节驱动模块化设计(电机+减速器+编码器),许多原型机的功能性和适应性得到了增强. 然而,在许多工业干预任务中,典型的电动机械手通常无法满足速度、强度或力的要求,这是电驱动技术的局限性导致的. 此外,在极端高压或低温的深海环境下工作时,电动机械手仍然需要压力平衡装置以保证其耐压性、防水性,这增加了系统重量和能耗. 因此,在电动机机械手未来的发展中,须弥补其模块化与轻量化技术在深海密封以及高功率密度上的不足. ...
AMADEUS: advanced manipulation for deep underwater sampling
2
1997
... 国外在电动水下机械手领域的研究集中在为水下机器人项目设计的机械手原型机上. 1997年,Ansaldo公司为AMADEUS项目设计7自由度的冗余电动机械手,用于水下500 m的合作操作. 该机械手的冗余自由度可以用于避障等次要目标[33 ] ,但同时冗余自由度会进一步加剧水环境的影响,导致动力学模型难以精确反映其运动与力学特性. 1998年,Ansaldo公司为SAUVIM项目设计MARIS 7080 机械手,其具有6自由度,通过内部油补偿可以在深海6000 m下作业;驱动系统采用带有减速装置的无刷电机,并配备旋转变压器用于角度测量,实现了末端执行器的亚毫米级定位[34 ] . 2013年,TRIDENT项目中产生了第一个水下模块化机械手UMA,通过不同的模块组合可以实现不同的运动学配置[35 ] . 此外,英国的ECA、澳大利亚的Reach Robotics等公司相继推出了最新的电动商用机械手. 在RAUVI项目中,ECA公司的Arm 5E机械手被重新设计,通过减小尺寸和重量,进一步弱化了其和水下航行器之间的动态耦合[36 ] . ...
... Parameters of foreign electric manipulators
Tab.3 电动机械手名称 研发单位/公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 JASON manipulator[31 ] Deep Submergence Laboratory 3 3 000 — — — — — — AMADEUS manipulator[33 ] Ansaldo 7 500 — — — — — 速率 MARIS 7080 [34 ] Ansaldo 6 6 000 1.4 65 45 8 — 半自动 UMA-1500 [41 ] Graal Tech 6 1 500 2 28 14 10 — 位置 Poseidon[42 ] University of Liverpool 5 100 1 — 37 5 — PID SAMURAI[43 ] Space Systems Laboratory 6 6 000 — — — — 1.6 — Electromechanical [44 ] Tecnomare/Ansaldo 6 — 2 160 — 30 — 主从/力反馈 BE5-500[45 ] Ocean Innovation System 6 500 0.7 15 8 — 1.6 速率 Bravo 3[46 ] Reach Robotics 2 450 0.41 4 2.6 15 20 主从 X7[46 ] Reach Robotics 6 300 0.508 2.9 1.8 3 7 位置/速率 Arm 5E Micro[47 ] ECA 4 6 000 0.64 10 5 10 10 位置/速率 Arm 5E[47 ] ECA 4 6 000 1 27 18 25 25 位置/速率 Arm 7E[47 ] ECA 6 6 000 1.79 69 49.2 40 25 位置/速率
表 4 国内电动机械手相关参数 ...
2
... 国外在电动水下机械手领域的研究集中在为水下机器人项目设计的机械手原型机上. 1997年,Ansaldo公司为AMADEUS项目设计7自由度的冗余电动机械手,用于水下500 m的合作操作. 该机械手的冗余自由度可以用于避障等次要目标[33 ] ,但同时冗余自由度会进一步加剧水环境的影响,导致动力学模型难以精确反映其运动与力学特性. 1998年,Ansaldo公司为SAUVIM项目设计MARIS 7080 机械手,其具有6自由度,通过内部油补偿可以在深海6000 m下作业;驱动系统采用带有减速装置的无刷电机,并配备旋转变压器用于角度测量,实现了末端执行器的亚毫米级定位[34 ] . 2013年,TRIDENT项目中产生了第一个水下模块化机械手UMA,通过不同的模块组合可以实现不同的运动学配置[35 ] . 此外,英国的ECA、澳大利亚的Reach Robotics等公司相继推出了最新的电动商用机械手. 在RAUVI项目中,ECA公司的Arm 5E机械手被重新设计,通过减小尺寸和重量,进一步弱化了其和水下航行器之间的动态耦合[36 ] . ...
... Parameters of foreign electric manipulators
Tab.3 电动机械手名称 研发单位/公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 JASON manipulator[31 ] Deep Submergence Laboratory 3 3 000 — — — — — — AMADEUS manipulator[33 ] Ansaldo 7 500 — — — — — 速率 MARIS 7080 [34 ] Ansaldo 6 6 000 1.4 65 45 8 — 半自动 UMA-1500 [41 ] Graal Tech 6 1 500 2 28 14 10 — 位置 Poseidon[42 ] University of Liverpool 5 100 1 — 37 5 — PID SAMURAI[43 ] Space Systems Laboratory 6 6 000 — — — — 1.6 — Electromechanical [44 ] Tecnomare/Ansaldo 6 — 2 160 — 30 — 主从/力反馈 BE5-500[45 ] Ocean Innovation System 6 500 0.7 15 8 — 1.6 速率 Bravo 3[46 ] Reach Robotics 2 450 0.41 4 2.6 15 20 主从 X7[46 ] Reach Robotics 6 300 0.508 2.9 1.8 3 7 位置/速率 Arm 5E Micro[47 ] ECA 4 6 000 0.64 10 5 10 10 位置/速率 Arm 5E[47 ] ECA 4 6 000 1 27 18 25 25 位置/速率 Arm 7E[47 ] ECA 6 6 000 1.79 69 49.2 40 25 位置/速率
表 4 国内电动机械手相关参数 ...
I-AUV mechatronics integration for the TRIDENT FP7 project
1
2015
... 国外在电动水下机械手领域的研究集中在为水下机器人项目设计的机械手原型机上. 1997年,Ansaldo公司为AMADEUS项目设计7自由度的冗余电动机械手,用于水下500 m的合作操作. 该机械手的冗余自由度可以用于避障等次要目标[33 ] ,但同时冗余自由度会进一步加剧水环境的影响,导致动力学模型难以精确反映其运动与力学特性. 1998年,Ansaldo公司为SAUVIM项目设计MARIS 7080 机械手,其具有6自由度,通过内部油补偿可以在深海6000 m下作业;驱动系统采用带有减速装置的无刷电机,并配备旋转变压器用于角度测量,实现了末端执行器的亚毫米级定位[34 ] . 2013年,TRIDENT项目中产生了第一个水下模块化机械手UMA,通过不同的模块组合可以实现不同的运动学配置[35 ] . 此外,英国的ECA、澳大利亚的Reach Robotics等公司相继推出了最新的电动商用机械手. 在RAUVI项目中,ECA公司的Arm 5E机械手被重新设计,通过减小尺寸和重量,进一步弱化了其和水下航行器之间的动态耦合[36 ] . ...
Grasping for the seabed: developing a new underwater robot arm for shallow-water intervention
1
2013
... 国外在电动水下机械手领域的研究集中在为水下机器人项目设计的机械手原型机上. 1997年,Ansaldo公司为AMADEUS项目设计7自由度的冗余电动机械手,用于水下500 m的合作操作. 该机械手的冗余自由度可以用于避障等次要目标[33 ] ,但同时冗余自由度会进一步加剧水环境的影响,导致动力学模型难以精确反映其运动与力学特性. 1998年,Ansaldo公司为SAUVIM项目设计MARIS 7080 机械手,其具有6自由度,通过内部油补偿可以在深海6000 m下作业;驱动系统采用带有减速装置的无刷电机,并配备旋转变压器用于角度测量,实现了末端执行器的亚毫米级定位[34 ] . 2013年,TRIDENT项目中产生了第一个水下模块化机械手UMA,通过不同的模块组合可以实现不同的运动学配置[35 ] . 此外,英国的ECA、澳大利亚的Reach Robotics等公司相继推出了最新的电动商用机械手. 在RAUVI项目中,ECA公司的Arm 5E机械手被重新设计,通过减小尺寸和重量,进一步弱化了其和水下航行器之间的动态耦合[36 ] . ...
基于能源消耗最小的自治水下机器人—机械手系统协调运动研究
2
2006
... 在国内,以华中科技大学为代表的科研单位在水下电动机械手设计与制造领域的研究取得了重大进展. 2005年,沈阳自动化研究所根据国家863计划项目“水下虚拟遥操作及监控机械手系统”研制三功能水下机械手,该机械手由2个摆动关节和手爪组成,关节部件采用分装设计,实现了驱动模块化[37 ] . 2010年,华中科技大学研发了一款3自由度水下机械手“华海-4E”,可以在3500 m深的水下工作,并配有传感器系统(包含超声波探头阵列和水下照相机),根据视觉、距离远近等反馈信息做出反应,实现了对水下目标的自主识别与捕捉[38 ] . 最近,浙江大学设计一种3自由度水下电动机械手,其中关节驱动系统采用高度集成化设计,将力矩电机、谐波减速器、编码器及制动器整合为独立模块,并加入了压力平衡装置,可以在深度为500 m以上的水下作业[39 ] . 此外,南京华研致力于水下电动机械手的研发,现已上市多个系列的产品. 其中,东麒系列的S7是一款水下轻量化高精度机械手,具有6个自由度,作业深度达到300 m,支持位置、速率控制,适用于大部分水下作业[40 ] . 分别归纳国外商业电动机械手、原型机与国内电动机械手及其参数,见表3 和表4 . ...
... Parameters of domestic electric manipulators
Tab.4 电动机械手名称 研发单位/公司 自由度 作业深度/m 伸展距离/m 质量(空气)/kg 质量(水下)/kg 抓举能力/kg 腕关节力矩/(N·m) 控制方式 自主式水下机械手[32 ] 华中科技大学 2 70 1.34 12.5 — 12 — 智能 三功能水下机械手[37 ] 沈阳自动化研究所 2 — — — — — — — 华海-4E[38 ] 华中科技大学 4 3 500 1.3 <90 — 10 — — 水下电动机械手[39 ] 浙江大学 4 500 0.694 14.3 — — 31 — L20[40 ] 南京华研 5 300 1.2 45 36 — 10 主从 东麒M3[40 ] 南京华研 2 300 — 7.8 3.4 — 49 位置/速率 东麒S7[40 ] 南京华研 4 300 — 7.3 3.3 — — 位置/速率 HUST-8FSA[48 ] 华中科技大学 6 100 3 — — 150 — 主从 4自由度水下机械手[49 ] 哈尔滨工程大学 4 — 0.684 — — — — —
水下电动机械手在精度、响应速度、维护和环保方面具有显著优势,并且通过关节驱动模块化设计(电机+减速器+编码器),许多原型机的功能性和适应性得到了增强. 然而,在许多工业干预任务中,典型的电动机械手通常无法满足速度、强度或力的要求,这是电驱动技术的局限性导致的. 此外,在极端高压或低温的深海环境下工作时,电动机械手仍然需要压力平衡装置以保证其耐压性、防水性,这增加了系统重量和能耗. 因此,在电动机机械手未来的发展中,须弥补其模块化与轻量化技术在深海密封以及高功率密度上的不足. ...
基于能源消耗最小的自治水下机器人—机械手系统协调运动研究
2
2006
... 在国内,以华中科技大学为代表的科研单位在水下电动机械手设计与制造领域的研究取得了重大进展. 2005年,沈阳自动化研究所根据国家863计划项目“水下虚拟遥操作及监控机械手系统”研制三功能水下机械手,该机械手由2个摆动关节和手爪组成,关节部件采用分装设计,实现了驱动模块化[37 ] . 2010年,华中科技大学研发了一款3自由度水下机械手“华海-4E”,可以在3500 m深的水下工作,并配有传感器系统(包含超声波探头阵列和水下照相机),根据视觉、距离远近等反馈信息做出反应,实现了对水下目标的自主识别与捕捉[38 ] . 最近,浙江大学设计一种3自由度水下电动机械手,其中关节驱动系统采用高度集成化设计,将力矩电机、谐波减速器、编码器及制动器整合为独立模块,并加入了压力平衡装置,可以在深度为500 m以上的水下作业[39 ] . 此外,南京华研致力于水下电动机械手的研发,现已上市多个系列的产品. 其中,东麒系列的S7是一款水下轻量化高精度机械手,具有6个自由度,作业深度达到300 m,支持位置、速率控制,适用于大部分水下作业[40 ] . 分别归纳国外商业电动机械手、原型机与国内电动机械手及其参数,见表3 和表4 . ...
... Parameters of domestic electric manipulators
Tab.4 电动机械手名称 研发单位/公司 自由度 作业深度/m 伸展距离/m 质量(空气)/kg 质量(水下)/kg 抓举能力/kg 腕关节力矩/(N·m) 控制方式 自主式水下机械手[32 ] 华中科技大学 2 70 1.34 12.5 — 12 — 智能 三功能水下机械手[37 ] 沈阳自动化研究所 2 — — — — — — — 华海-4E[38 ] 华中科技大学 4 3 500 1.3 <90 — 10 — — 水下电动机械手[39 ] 浙江大学 4 500 0.694 14.3 — — 31 — L20[40 ] 南京华研 5 300 1.2 45 36 — 10 主从 东麒M3[40 ] 南京华研 2 300 — 7.8 3.4 — 49 位置/速率 东麒S7[40 ] 南京华研 4 300 — 7.3 3.3 — — 位置/速率 HUST-8FSA[48 ] 华中科技大学 6 100 3 — — 150 — 主从 4自由度水下机械手[49 ] 哈尔滨工程大学 4 — 0.684 — — — — —
水下电动机械手在精度、响应速度、维护和环保方面具有显著优势,并且通过关节驱动模块化设计(电机+减速器+编码器),许多原型机的功能性和适应性得到了增强. 然而,在许多工业干预任务中,典型的电动机械手通常无法满足速度、强度或力的要求,这是电驱动技术的局限性导致的. 此外,在极端高压或低温的深海环境下工作时,电动机械手仍然需要压力平衡装置以保证其耐压性、防水性,这增加了系统重量和能耗. 因此,在电动机机械手未来的发展中,须弥补其模块化与轻量化技术在深海密封以及高功率密度上的不足. ...
Development of a deep ocean electric autonomous manipulator
2
2011
... 在国内,以华中科技大学为代表的科研单位在水下电动机械手设计与制造领域的研究取得了重大进展. 2005年,沈阳自动化研究所根据国家863计划项目“水下虚拟遥操作及监控机械手系统”研制三功能水下机械手,该机械手由2个摆动关节和手爪组成,关节部件采用分装设计,实现了驱动模块化[37 ] . 2010年,华中科技大学研发了一款3自由度水下机械手“华海-4E”,可以在3500 m深的水下工作,并配有传感器系统(包含超声波探头阵列和水下照相机),根据视觉、距离远近等反馈信息做出反应,实现了对水下目标的自主识别与捕捉[38 ] . 最近,浙江大学设计一种3自由度水下电动机械手,其中关节驱动系统采用高度集成化设计,将力矩电机、谐波减速器、编码器及制动器整合为独立模块,并加入了压力平衡装置,可以在深度为500 m以上的水下作业[39 ] . 此外,南京华研致力于水下电动机械手的研发,现已上市多个系列的产品. 其中,东麒系列的S7是一款水下轻量化高精度机械手,具有6个自由度,作业深度达到300 m,支持位置、速率控制,适用于大部分水下作业[40 ] . 分别归纳国外商业电动机械手、原型机与国内电动机械手及其参数,见表3 和表4 . ...
... Parameters of domestic electric manipulators
Tab.4 电动机械手名称 研发单位/公司 自由度 作业深度/m 伸展距离/m 质量(空气)/kg 质量(水下)/kg 抓举能力/kg 腕关节力矩/(N·m) 控制方式 自主式水下机械手[32 ] 华中科技大学 2 70 1.34 12.5 — 12 — 智能 三功能水下机械手[37 ] 沈阳自动化研究所 2 — — — — — — — 华海-4E[38 ] 华中科技大学 4 3 500 1.3 <90 — 10 — — 水下电动机械手[39 ] 浙江大学 4 500 0.694 14.3 — — 31 — L20[40 ] 南京华研 5 300 1.2 45 36 — 10 主从 东麒M3[40 ] 南京华研 2 300 — 7.8 3.4 — 49 位置/速率 东麒S7[40 ] 南京华研 4 300 — 7.3 3.3 — — 位置/速率 HUST-8FSA[48 ] 华中科技大学 6 100 3 — — 150 — 主从 4自由度水下机械手[49 ] 哈尔滨工程大学 4 — 0.684 — — — — —
水下电动机械手在精度、响应速度、维护和环保方面具有显著优势,并且通过关节驱动模块化设计(电机+减速器+编码器),许多原型机的功能性和适应性得到了增强. 然而,在许多工业干预任务中,典型的电动机械手通常无法满足速度、强度或力的要求,这是电驱动技术的局限性导致的. 此外,在极端高压或低温的深海环境下工作时,电动机械手仍然需要压力平衡装置以保证其耐压性、防水性,这增加了系统重量和能耗. 因此,在电动机机械手未来的发展中,须弥补其模块化与轻量化技术在深海密封以及高功率密度上的不足. ...
Development of underwater electric manipulator based on interventional autonomous underwater vehicle (AUV)
2
2024
... 在国内,以华中科技大学为代表的科研单位在水下电动机械手设计与制造领域的研究取得了重大进展. 2005年,沈阳自动化研究所根据国家863计划项目“水下虚拟遥操作及监控机械手系统”研制三功能水下机械手,该机械手由2个摆动关节和手爪组成,关节部件采用分装设计,实现了驱动模块化[37 ] . 2010年,华中科技大学研发了一款3自由度水下机械手“华海-4E”,可以在3500 m深的水下工作,并配有传感器系统(包含超声波探头阵列和水下照相机),根据视觉、距离远近等反馈信息做出反应,实现了对水下目标的自主识别与捕捉[38 ] . 最近,浙江大学设计一种3自由度水下电动机械手,其中关节驱动系统采用高度集成化设计,将力矩电机、谐波减速器、编码器及制动器整合为独立模块,并加入了压力平衡装置,可以在深度为500 m以上的水下作业[39 ] . 此外,南京华研致力于水下电动机械手的研发,现已上市多个系列的产品. 其中,东麒系列的S7是一款水下轻量化高精度机械手,具有6个自由度,作业深度达到300 m,支持位置、速率控制,适用于大部分水下作业[40 ] . 分别归纳国外商业电动机械手、原型机与国内电动机械手及其参数,见表3 和表4 . ...
... Parameters of domestic electric manipulators
Tab.4 电动机械手名称 研发单位/公司 自由度 作业深度/m 伸展距离/m 质量(空气)/kg 质量(水下)/kg 抓举能力/kg 腕关节力矩/(N·m) 控制方式 自主式水下机械手[32 ] 华中科技大学 2 70 1.34 12.5 — 12 — 智能 三功能水下机械手[37 ] 沈阳自动化研究所 2 — — — — — — — 华海-4E[38 ] 华中科技大学 4 3 500 1.3 <90 — 10 — — 水下电动机械手[39 ] 浙江大学 4 500 0.694 14.3 — — 31 — L20[40 ] 南京华研 5 300 1.2 45 36 — 10 主从 东麒M3[40 ] 南京华研 2 300 — 7.8 3.4 — 49 位置/速率 东麒S7[40 ] 南京华研 4 300 — 7.3 3.3 — — 位置/速率 HUST-8FSA[48 ] 华中科技大学 6 100 3 — — 150 — 主从 4自由度水下机械手[49 ] 哈尔滨工程大学 4 — 0.684 — — — — —
水下电动机械手在精度、响应速度、维护和环保方面具有显著优势,并且通过关节驱动模块化设计(电机+减速器+编码器),许多原型机的功能性和适应性得到了增强. 然而,在许多工业干预任务中,典型的电动机械手通常无法满足速度、强度或力的要求,这是电驱动技术的局限性导致的. 此外,在极端高压或低温的深海环境下工作时,电动机械手仍然需要压力平衡装置以保证其耐压性、防水性,这增加了系统重量和能耗. 因此,在电动机机械手未来的发展中,须弥补其模块化与轻量化技术在深海密封以及高功率密度上的不足. ...
4
... 在国内,以华中科技大学为代表的科研单位在水下电动机械手设计与制造领域的研究取得了重大进展. 2005年,沈阳自动化研究所根据国家863计划项目“水下虚拟遥操作及监控机械手系统”研制三功能水下机械手,该机械手由2个摆动关节和手爪组成,关节部件采用分装设计,实现了驱动模块化[37 ] . 2010年,华中科技大学研发了一款3自由度水下机械手“华海-4E”,可以在3500 m深的水下工作,并配有传感器系统(包含超声波探头阵列和水下照相机),根据视觉、距离远近等反馈信息做出反应,实现了对水下目标的自主识别与捕捉[38 ] . 最近,浙江大学设计一种3自由度水下电动机械手,其中关节驱动系统采用高度集成化设计,将力矩电机、谐波减速器、编码器及制动器整合为独立模块,并加入了压力平衡装置,可以在深度为500 m以上的水下作业[39 ] . 此外,南京华研致力于水下电动机械手的研发,现已上市多个系列的产品. 其中,东麒系列的S7是一款水下轻量化高精度机械手,具有6个自由度,作业深度达到300 m,支持位置、速率控制,适用于大部分水下作业[40 ] . 分别归纳国外商业电动机械手、原型机与国内电动机械手及其参数,见表3 和表4 . ...
... Parameters of domestic electric manipulators
Tab.4 电动机械手名称 研发单位/公司 自由度 作业深度/m 伸展距离/m 质量(空气)/kg 质量(水下)/kg 抓举能力/kg 腕关节力矩/(N·m) 控制方式 自主式水下机械手[32 ] 华中科技大学 2 70 1.34 12.5 — 12 — 智能 三功能水下机械手[37 ] 沈阳自动化研究所 2 — — — — — — — 华海-4E[38 ] 华中科技大学 4 3 500 1.3 <90 — 10 — — 水下电动机械手[39 ] 浙江大学 4 500 0.694 14.3 — — 31 — L20[40 ] 南京华研 5 300 1.2 45 36 — 10 主从 东麒M3[40 ] 南京华研 2 300 — 7.8 3.4 — 49 位置/速率 东麒S7[40 ] 南京华研 4 300 — 7.3 3.3 — — 位置/速率 HUST-8FSA[48 ] 华中科技大学 6 100 3 — — 150 — 主从 4自由度水下机械手[49 ] 哈尔滨工程大学 4 — 0.684 — — — — —
水下电动机械手在精度、响应速度、维护和环保方面具有显著优势,并且通过关节驱动模块化设计(电机+减速器+编码器),许多原型机的功能性和适应性得到了增强. 然而,在许多工业干预任务中,典型的电动机械手通常无法满足速度、强度或力的要求,这是电驱动技术的局限性导致的. 此外,在极端高压或低温的深海环境下工作时,电动机械手仍然需要压力平衡装置以保证其耐压性、防水性,这增加了系统重量和能耗. 因此,在电动机机械手未来的发展中,须弥补其模块化与轻量化技术在深海密封以及高功率密度上的不足. ...
... [
40 ]
南京华研 2 300 — 7.8 3.4 — 49 位置/速率 东麒S7[40 ] 南京华研 4 300 — 7.3 3.3 — — 位置/速率 HUST-8FSA[48 ] 华中科技大学 6 100 3 — — 150 — 主从 4自由度水下机械手[49 ] 哈尔滨工程大学 4 — 0.684 — — — — — 水下电动机械手在精度、响应速度、维护和环保方面具有显著优势,并且通过关节驱动模块化设计(电机+减速器+编码器),许多原型机的功能性和适应性得到了增强. 然而,在许多工业干预任务中,典型的电动机械手通常无法满足速度、强度或力的要求,这是电驱动技术的局限性导致的. 此外,在极端高压或低温的深海环境下工作时,电动机械手仍然需要压力平衡装置以保证其耐压性、防水性,这增加了系统重量和能耗. 因此,在电动机机械手未来的发展中,须弥补其模块化与轻量化技术在深海密封以及高功率密度上的不足. ...
... [
40 ]
南京华研 4 300 — 7.3 3.3 — — 位置/速率 HUST-8FSA[48 ] 华中科技大学 6 100 3 — — 150 — 主从 4自由度水下机械手[49 ] 哈尔滨工程大学 4 — 0.684 — — — — — 水下电动机械手在精度、响应速度、维护和环保方面具有显著优势,并且通过关节驱动模块化设计(电机+减速器+编码器),许多原型机的功能性和适应性得到了增强. 然而,在许多工业干预任务中,典型的电动机械手通常无法满足速度、强度或力的要求,这是电驱动技术的局限性导致的. 此外,在极端高压或低温的深海环境下工作时,电动机械手仍然需要压力平衡装置以保证其耐压性、防水性,这增加了系统重量和能耗. 因此,在电动机机械手未来的发展中,须弥补其模块化与轻量化技术在深海密封以及高功率密度上的不足. ...
1
... Parameters of foreign electric manipulators
Tab.3 电动机械手名称 研发单位/公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 JASON manipulator[31 ] Deep Submergence Laboratory 3 3 000 — — — — — — AMADEUS manipulator[33 ] Ansaldo 7 500 — — — — — 速率 MARIS 7080 [34 ] Ansaldo 6 6 000 1.4 65 45 8 — 半自动 UMA-1500 [41 ] Graal Tech 6 1 500 2 28 14 10 — 位置 Poseidon[42 ] University of Liverpool 5 100 1 — 37 5 — PID SAMURAI[43 ] Space Systems Laboratory 6 6 000 — — — — 1.6 — Electromechanical [44 ] Tecnomare/Ansaldo 6 — 2 160 — 30 — 主从/力反馈 BE5-500[45 ] Ocean Innovation System 6 500 0.7 15 8 — 1.6 速率 Bravo 3[46 ] Reach Robotics 2 450 0.41 4 2.6 15 20 主从 X7[46 ] Reach Robotics 6 300 0.508 2.9 1.8 3 7 位置/速率 Arm 5E Micro[47 ] ECA 4 6 000 0.64 10 5 10 10 位置/速率 Arm 5E[47 ] ECA 4 6 000 1 27 18 25 25 位置/速率 Arm 7E[47 ] ECA 6 6 000 1.79 69 49.2 40 25 位置/速率
表 4 国内电动机械手相关参数 ...
1
... Parameters of foreign electric manipulators
Tab.3 电动机械手名称 研发单位/公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 JASON manipulator[31 ] Deep Submergence Laboratory 3 3 000 — — — — — — AMADEUS manipulator[33 ] Ansaldo 7 500 — — — — — 速率 MARIS 7080 [34 ] Ansaldo 6 6 000 1.4 65 45 8 — 半自动 UMA-1500 [41 ] Graal Tech 6 1 500 2 28 14 10 — 位置 Poseidon[42 ] University of Liverpool 5 100 1 — 37 5 — PID SAMURAI[43 ] Space Systems Laboratory 6 6 000 — — — — 1.6 — Electromechanical [44 ] Tecnomare/Ansaldo 6 — 2 160 — 30 — 主从/力反馈 BE5-500[45 ] Ocean Innovation System 6 500 0.7 15 8 — 1.6 速率 Bravo 3[46 ] Reach Robotics 2 450 0.41 4 2.6 15 20 主从 X7[46 ] Reach Robotics 6 300 0.508 2.9 1.8 3 7 位置/速率 Arm 5E Micro[47 ] ECA 4 6 000 0.64 10 5 10 10 位置/速率 Arm 5E[47 ] ECA 4 6 000 1 27 18 25 25 位置/速率 Arm 7E[47 ] ECA 6 6 000 1.79 69 49.2 40 25 位置/速率
表 4 国内电动机械手相关参数 ...
1
... Parameters of foreign electric manipulators
Tab.3 电动机械手名称 研发单位/公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 JASON manipulator[31 ] Deep Submergence Laboratory 3 3 000 — — — — — — AMADEUS manipulator[33 ] Ansaldo 7 500 — — — — — 速率 MARIS 7080 [34 ] Ansaldo 6 6 000 1.4 65 45 8 — 半自动 UMA-1500 [41 ] Graal Tech 6 1 500 2 28 14 10 — 位置 Poseidon[42 ] University of Liverpool 5 100 1 — 37 5 — PID SAMURAI[43 ] Space Systems Laboratory 6 6 000 — — — — 1.6 — Electromechanical [44 ] Tecnomare/Ansaldo 6 — 2 160 — 30 — 主从/力反馈 BE5-500[45 ] Ocean Innovation System 6 500 0.7 15 8 — 1.6 速率 Bravo 3[46 ] Reach Robotics 2 450 0.41 4 2.6 15 20 主从 X7[46 ] Reach Robotics 6 300 0.508 2.9 1.8 3 7 位置/速率 Arm 5E Micro[47 ] ECA 4 6 000 0.64 10 5 10 10 位置/速率 Arm 5E[47 ] ECA 4 6 000 1 27 18 25 25 位置/速率 Arm 7E[47 ] ECA 6 6 000 1.79 69 49.2 40 25 位置/速率
表 4 国内电动机械手相关参数 ...
1
... Parameters of foreign electric manipulators
Tab.3 电动机械手名称 研发单位/公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 JASON manipulator[31 ] Deep Submergence Laboratory 3 3 000 — — — — — — AMADEUS manipulator[33 ] Ansaldo 7 500 — — — — — 速率 MARIS 7080 [34 ] Ansaldo 6 6 000 1.4 65 45 8 — 半自动 UMA-1500 [41 ] Graal Tech 6 1 500 2 28 14 10 — 位置 Poseidon[42 ] University of Liverpool 5 100 1 — 37 5 — PID SAMURAI[43 ] Space Systems Laboratory 6 6 000 — — — — 1.6 — Electromechanical [44 ] Tecnomare/Ansaldo 6 — 2 160 — 30 — 主从/力反馈 BE5-500[45 ] Ocean Innovation System 6 500 0.7 15 8 — 1.6 速率 Bravo 3[46 ] Reach Robotics 2 450 0.41 4 2.6 15 20 主从 X7[46 ] Reach Robotics 6 300 0.508 2.9 1.8 3 7 位置/速率 Arm 5E Micro[47 ] ECA 4 6 000 0.64 10 5 10 10 位置/速率 Arm 5E[47 ] ECA 4 6 000 1 27 18 25 25 位置/速率 Arm 7E[47 ] ECA 6 6 000 1.79 69 49.2 40 25 位置/速率
表 4 国内电动机械手相关参数 ...
1
... Parameters of foreign electric manipulators
Tab.3 电动机械手名称 研发单位/公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 JASON manipulator[31 ] Deep Submergence Laboratory 3 3 000 — — — — — — AMADEUS manipulator[33 ] Ansaldo 7 500 — — — — — 速率 MARIS 7080 [34 ] Ansaldo 6 6 000 1.4 65 45 8 — 半自动 UMA-1500 [41 ] Graal Tech 6 1 500 2 28 14 10 — 位置 Poseidon[42 ] University of Liverpool 5 100 1 — 37 5 — PID SAMURAI[43 ] Space Systems Laboratory 6 6 000 — — — — 1.6 — Electromechanical [44 ] Tecnomare/Ansaldo 6 — 2 160 — 30 — 主从/力反馈 BE5-500[45 ] Ocean Innovation System 6 500 0.7 15 8 — 1.6 速率 Bravo 3[46 ] Reach Robotics 2 450 0.41 4 2.6 15 20 主从 X7[46 ] Reach Robotics 6 300 0.508 2.9 1.8 3 7 位置/速率 Arm 5E Micro[47 ] ECA 4 6 000 0.64 10 5 10 10 位置/速率 Arm 5E[47 ] ECA 4 6 000 1 27 18 25 25 位置/速率 Arm 7E[47 ] ECA 6 6 000 1.79 69 49.2 40 25 位置/速率
表 4 国内电动机械手相关参数 ...
2
... Parameters of foreign electric manipulators
Tab.3 电动机械手名称 研发单位/公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 JASON manipulator[31 ] Deep Submergence Laboratory 3 3 000 — — — — — — AMADEUS manipulator[33 ] Ansaldo 7 500 — — — — — 速率 MARIS 7080 [34 ] Ansaldo 6 6 000 1.4 65 45 8 — 半自动 UMA-1500 [41 ] Graal Tech 6 1 500 2 28 14 10 — 位置 Poseidon[42 ] University of Liverpool 5 100 1 — 37 5 — PID SAMURAI[43 ] Space Systems Laboratory 6 6 000 — — — — 1.6 — Electromechanical [44 ] Tecnomare/Ansaldo 6 — 2 160 — 30 — 主从/力反馈 BE5-500[45 ] Ocean Innovation System 6 500 0.7 15 8 — 1.6 速率 Bravo 3[46 ] Reach Robotics 2 450 0.41 4 2.6 15 20 主从 X7[46 ] Reach Robotics 6 300 0.508 2.9 1.8 3 7 位置/速率 Arm 5E Micro[47 ] ECA 4 6 000 0.64 10 5 10 10 位置/速率 Arm 5E[47 ] ECA 4 6 000 1 27 18 25 25 位置/速率 Arm 7E[47 ] ECA 6 6 000 1.79 69 49.2 40 25 位置/速率
表 4 国内电动机械手相关参数 ...
... [
46 ]
Reach Robotics 6 300 0.508 2.9 1.8 3 7 位置/速率 Arm 5E Micro[47 ] ECA 4 6 000 0.64 10 5 10 10 位置/速率 Arm 5E[47 ] ECA 4 6 000 1 27 18 25 25 位置/速率 Arm 7E[47 ] ECA 6 6 000 1.79 69 49.2 40 25 位置/速率 表 4 国内电动机械手相关参数 ...
3
... Parameters of foreign electric manipulators
Tab.3 电动机械手名称 研发单位/公司 自由度 作业 伸展 质量 质量 抓举 腕关节 控制方式 JASON manipulator[31 ] Deep Submergence Laboratory 3 3 000 — — — — — — AMADEUS manipulator[33 ] Ansaldo 7 500 — — — — — 速率 MARIS 7080 [34 ] Ansaldo 6 6 000 1.4 65 45 8 — 半自动 UMA-1500 [41 ] Graal Tech 6 1 500 2 28 14 10 — 位置 Poseidon[42 ] University of Liverpool 5 100 1 — 37 5 — PID SAMURAI[43 ] Space Systems Laboratory 6 6 000 — — — — 1.6 — Electromechanical [44 ] Tecnomare/Ansaldo 6 — 2 160 — 30 — 主从/力反馈 BE5-500[45 ] Ocean Innovation System 6 500 0.7 15 8 — 1.6 速率 Bravo 3[46 ] Reach Robotics 2 450 0.41 4 2.6 15 20 主从 X7[46 ] Reach Robotics 6 300 0.508 2.9 1.8 3 7 位置/速率 Arm 5E Micro[47 ] ECA 4 6 000 0.64 10 5 10 10 位置/速率 Arm 5E[47 ] ECA 4 6 000 1 27 18 25 25 位置/速率 Arm 7E[47 ] ECA 6 6 000 1.79 69 49.2 40 25 位置/速率
表 4 国内电动机械手相关参数 ...
... [
47 ]
ECA 4 6 000 1 27 18 25 25 位置/速率 Arm 7E[47 ] ECA 6 6 000 1.79 69 49.2 40 25 位置/速率 表 4 国内电动机械手相关参数 ...
... [
47 ]
ECA 6 6 000 1.79 69 49.2 40 25 位置/速率 表 4 国内电动机械手相关参数 ...
1
... Parameters of domestic electric manipulators
Tab.4 电动机械手名称 研发单位/公司 自由度 作业深度/m 伸展距离/m 质量(空气)/kg 质量(水下)/kg 抓举能力/kg 腕关节力矩/(N·m) 控制方式 自主式水下机械手[32 ] 华中科技大学 2 70 1.34 12.5 — 12 — 智能 三功能水下机械手[37 ] 沈阳自动化研究所 2 — — — — — — — 华海-4E[38 ] 华中科技大学 4 3 500 1.3 <90 — 10 — — 水下电动机械手[39 ] 浙江大学 4 500 0.694 14.3 — — 31 — L20[40 ] 南京华研 5 300 1.2 45 36 — 10 主从 东麒M3[40 ] 南京华研 2 300 — 7.8 3.4 — 49 位置/速率 东麒S7[40 ] 南京华研 4 300 — 7.3 3.3 — — 位置/速率 HUST-8FSA[48 ] 华中科技大学 6 100 3 — — 150 — 主从 4自由度水下机械手[49 ] 哈尔滨工程大学 4 — 0.684 — — — — —
水下电动机械手在精度、响应速度、维护和环保方面具有显著优势,并且通过关节驱动模块化设计(电机+减速器+编码器),许多原型机的功能性和适应性得到了增强. 然而,在许多工业干预任务中,典型的电动机械手通常无法满足速度、强度或力的要求,这是电驱动技术的局限性导致的. 此外,在极端高压或低温的深海环境下工作时,电动机械手仍然需要压力平衡装置以保证其耐压性、防水性,这增加了系统重量和能耗. 因此,在电动机机械手未来的发展中,须弥补其模块化与轻量化技术在深海密封以及高功率密度上的不足. ...
1
... Parameters of domestic electric manipulators
Tab.4 电动机械手名称 研发单位/公司 自由度 作业深度/m 伸展距离/m 质量(空气)/kg 质量(水下)/kg 抓举能力/kg 腕关节力矩/(N·m) 控制方式 自主式水下机械手[32 ] 华中科技大学 2 70 1.34 12.5 — 12 — 智能 三功能水下机械手[37 ] 沈阳自动化研究所 2 — — — — — — — 华海-4E[38 ] 华中科技大学 4 3 500 1.3 <90 — 10 — — 水下电动机械手[39 ] 浙江大学 4 500 0.694 14.3 — — 31 — L20[40 ] 南京华研 5 300 1.2 45 36 — 10 主从 东麒M3[40 ] 南京华研 2 300 — 7.8 3.4 — 49 位置/速率 东麒S7[40 ] 南京华研 4 300 — 7.3 3.3 — — 位置/速率 HUST-8FSA[48 ] 华中科技大学 6 100 3 — — 150 — 主从 4自由度水下机械手[49 ] 哈尔滨工程大学 4 — 0.684 — — — — —
水下电动机械手在精度、响应速度、维护和环保方面具有显著优势,并且通过关节驱动模块化设计(电机+减速器+编码器),许多原型机的功能性和适应性得到了增强. 然而,在许多工业干预任务中,典型的电动机械手通常无法满足速度、强度或力的要求,这是电驱动技术的局限性导致的. 此外,在极端高压或低温的深海环境下工作时,电动机械手仍然需要压力平衡装置以保证其耐压性、防水性,这增加了系统重量和能耗. 因此,在电动机机械手未来的发展中,须弥补其模块化与轻量化技术在深海密封以及高功率密度上的不足. ...
1
... Parameters of domestic electric manipulators
Tab.4 电动机械手名称 研发单位/公司 自由度 作业深度/m 伸展距离/m 质量(空气)/kg 质量(水下)/kg 抓举能力/kg 腕关节力矩/(N·m) 控制方式 自主式水下机械手[32 ] 华中科技大学 2 70 1.34 12.5 — 12 — 智能 三功能水下机械手[37 ] 沈阳自动化研究所 2 — — — — — — — 华海-4E[38 ] 华中科技大学 4 3 500 1.3 <90 — 10 — — 水下电动机械手[39 ] 浙江大学 4 500 0.694 14.3 — — 31 — L20[40 ] 南京华研 5 300 1.2 45 36 — 10 主从 东麒M3[40 ] 南京华研 2 300 — 7.8 3.4 — 49 位置/速率 东麒S7[40 ] 南京华研 4 300 — 7.3 3.3 — — 位置/速率 HUST-8FSA[48 ] 华中科技大学 6 100 3 — — 150 — 主从 4自由度水下机械手[49 ] 哈尔滨工程大学 4 — 0.684 — — — — —
水下电动机械手在精度、响应速度、维护和环保方面具有显著优势,并且通过关节驱动模块化设计(电机+减速器+编码器),许多原型机的功能性和适应性得到了增强. 然而,在许多工业干预任务中,典型的电动机械手通常无法满足速度、强度或力的要求,这是电驱动技术的局限性导致的. 此外,在极端高压或低温的深海环境下工作时,电动机械手仍然需要压力平衡装置以保证其耐压性、防水性,这增加了系统重量和能耗. 因此,在电动机机械手未来的发展中,须弥补其模块化与轻量化技术在深海密封以及高功率密度上的不足. ...
1
... Parameters of domestic electric manipulators
Tab.4 电动机械手名称 研发单位/公司 自由度 作业深度/m 伸展距离/m 质量(空气)/kg 质量(水下)/kg 抓举能力/kg 腕关节力矩/(N·m) 控制方式 自主式水下机械手[32 ] 华中科技大学 2 70 1.34 12.5 — 12 — 智能 三功能水下机械手[37 ] 沈阳自动化研究所 2 — — — — — — — 华海-4E[38 ] 华中科技大学 4 3 500 1.3 <90 — 10 — — 水下电动机械手[39 ] 浙江大学 4 500 0.694 14.3 — — 31 — L20[40 ] 南京华研 5 300 1.2 45 36 — 10 主从 东麒M3[40 ] 南京华研 2 300 — 7.8 3.4 — 49 位置/速率 东麒S7[40 ] 南京华研 4 300 — 7.3 3.3 — — 位置/速率 HUST-8FSA[48 ] 华中科技大学 6 100 3 — — 150 — 主从 4自由度水下机械手[49 ] 哈尔滨工程大学 4 — 0.684 — — — — —
水下电动机械手在精度、响应速度、维护和环保方面具有显著优势,并且通过关节驱动模块化设计(电机+减速器+编码器),许多原型机的功能性和适应性得到了增强. 然而,在许多工业干预任务中,典型的电动机械手通常无法满足速度、强度或力的要求,这是电驱动技术的局限性导致的. 此外,在极端高压或低温的深海环境下工作时,电动机械手仍然需要压力平衡装置以保证其耐压性、防水性,这增加了系统重量和能耗. 因此,在电动机机械手未来的发展中,须弥补其模块化与轻量化技术在深海密封以及高功率密度上的不足. ...
Kane’s method for robotic arm dynamics: a novel approach
1
2013
... 水下机械手动力学模型的建立通常涉及陆地环境中的动力学模型和水下环境中的水动力学模型2部分. 陆地环境中的动力学建模方法包括Lagrange法、Newton-Eular法及Kane法等[50 ] ,这些方法都比较成熟且完整. 水动力学模型的理论尚不完整且不成熟,缺乏准确的建模方法对其进行表示. 现有的水动力学模型主要考虑惯性水动力模型和黏性水动力模型,如图3 所示.其中,V n 为来流法向速度,V r 为来流切向速度. ...
水下机械手水动力学分析及控制方法研究
1
2022
... 式中:F d 为水阻力,F m 为附加质量力,F l 为升力,F b 为浮力[51 ] . 水阻力F d 与附加质量力F m 的计算采用Morison等[52 ] 研究柱状结构波浪力时推导出的Morison方程,如图4 所示,方程表示为 ...
水下机械手水动力学分析及控制方法研究
1
2022
... 式中:F d 为水阻力,F m 为附加质量力,F l 为升力,F b 为浮力[51 ] . 水阻力F d 与附加质量力F m 的计算采用Morison等[52 ] 研究柱状结构波浪力时推导出的Morison方程,如图4 所示,方程表示为 ...
The force exerted by surface waves on piles
1
1950
... 式中:F d 为水阻力,F m 为附加质量力,F l 为升力,F b 为浮力[51 ] . 水阻力F d 与附加质量力F m 的计算采用Morison等[52 ] 研究柱状结构波浪力时推导出的Morison方程,如图4 所示,方程表示为 ...
基于切片理论的水下灵巧手手指动力学分析
1
2007
... 目前,大量研究基于Morison方程建立静水环境下的惯性水动力学模型,但是静水假设与实际的工况环境存在差异,导致建模精度不够. 静水环境中水动力主要由机械手自身运动产生(搅水受力),此时来流速度V 等效为连杆单元的法向速度. 同时,机械手是一种多关节的串联机构,不同关节之间的运动引起的水动力之间存在耦合作用,这时单个连杆产生的惯性水动力由多个连杆关节间的相对运动引起,在此基础上可以应用Morison方程计算其水阻力与附加质量力[53 ] . 惯性水动力矩对关节驱动力矩的影响很小,一般只占1%甚至0.01%,但是随着机械手的自由度增加,关节的耦合作用对驱动力矩的影响变得更显著. 研究表明,6自由度的机械手关节1所受的最大瞬时惯性水动力矩可以达到驱动力矩的8%左右[54 ] . 因此,设计多自由度水下机械手时须考虑惯性水动力矩对关节1驱动力矩的影响. 另外,浮力也是一个重要的影响因素. 浮力矩可以达到陆地环境中驱动力矩的2/3[55 ] ;特别是对于高自重和大载重的机械手,由于浮力与质量成正比关系,浮力受到质量的显著影响,需要在动力学建模中对浮力矩项进行补偿. ...
基于切片理论的水下灵巧手手指动力学分析
1
2007
... 目前,大量研究基于Morison方程建立静水环境下的惯性水动力学模型,但是静水假设与实际的工况环境存在差异,导致建模精度不够. 静水环境中水动力主要由机械手自身运动产生(搅水受力),此时来流速度V 等效为连杆单元的法向速度. 同时,机械手是一种多关节的串联机构,不同关节之间的运动引起的水动力之间存在耦合作用,这时单个连杆产生的惯性水动力由多个连杆关节间的相对运动引起,在此基础上可以应用Morison方程计算其水阻力与附加质量力[53 ] . 惯性水动力矩对关节驱动力矩的影响很小,一般只占1%甚至0.01%,但是随着机械手的自由度增加,关节的耦合作用对驱动力矩的影响变得更显著. 研究表明,6自由度的机械手关节1所受的最大瞬时惯性水动力矩可以达到驱动力矩的8%左右[54 ] . 因此,设计多自由度水下机械手时须考虑惯性水动力矩对关节1驱动力矩的影响. 另外,浮力也是一个重要的影响因素. 浮力矩可以达到陆地环境中驱动力矩的2/3[55 ] ;特别是对于高自重和大载重的机械手,由于浮力与质量成正比关系,浮力受到质量的显著影响,需要在动力学建模中对浮力矩项进行补偿. ...
六自由度水下机械臂动力学模型及流阻影响研究
1
2020
... 目前,大量研究基于Morison方程建立静水环境下的惯性水动力学模型,但是静水假设与实际的工况环境存在差异,导致建模精度不够. 静水环境中水动力主要由机械手自身运动产生(搅水受力),此时来流速度V 等效为连杆单元的法向速度. 同时,机械手是一种多关节的串联机构,不同关节之间的运动引起的水动力之间存在耦合作用,这时单个连杆产生的惯性水动力由多个连杆关节间的相对运动引起,在此基础上可以应用Morison方程计算其水阻力与附加质量力[53 ] . 惯性水动力矩对关节驱动力矩的影响很小,一般只占1%甚至0.01%,但是随着机械手的自由度增加,关节的耦合作用对驱动力矩的影响变得更显著. 研究表明,6自由度的机械手关节1所受的最大瞬时惯性水动力矩可以达到驱动力矩的8%左右[54 ] . 因此,设计多自由度水下机械手时须考虑惯性水动力矩对关节1驱动力矩的影响. 另外,浮力也是一个重要的影响因素. 浮力矩可以达到陆地环境中驱动力矩的2/3[55 ] ;特别是对于高自重和大载重的机械手,由于浮力与质量成正比关系,浮力受到质量的显著影响,需要在动力学建模中对浮力矩项进行补偿. ...
六自由度水下机械臂动力学模型及流阻影响研究
1
2020
... 目前,大量研究基于Morison方程建立静水环境下的惯性水动力学模型,但是静水假设与实际的工况环境存在差异,导致建模精度不够. 静水环境中水动力主要由机械手自身运动产生(搅水受力),此时来流速度V 等效为连杆单元的法向速度. 同时,机械手是一种多关节的串联机构,不同关节之间的运动引起的水动力之间存在耦合作用,这时单个连杆产生的惯性水动力由多个连杆关节间的相对运动引起,在此基础上可以应用Morison方程计算其水阻力与附加质量力[53 ] . 惯性水动力矩对关节驱动力矩的影响很小,一般只占1%甚至0.01%,但是随着机械手的自由度增加,关节的耦合作用对驱动力矩的影响变得更显著. 研究表明,6自由度的机械手关节1所受的最大瞬时惯性水动力矩可以达到驱动力矩的8%左右[54 ] . 因此,设计多自由度水下机械手时须考虑惯性水动力矩对关节1驱动力矩的影响. 另外,浮力也是一个重要的影响因素. 浮力矩可以达到陆地环境中驱动力矩的2/3[55 ] ;特别是对于高自重和大载重的机械手,由于浮力与质量成正比关系,浮力受到质量的显著影响,需要在动力学建模中对浮力矩项进行补偿. ...
水下机械手动力学模型及力矩影响研究
1
2017
... 目前,大量研究基于Morison方程建立静水环境下的惯性水动力学模型,但是静水假设与实际的工况环境存在差异,导致建模精度不够. 静水环境中水动力主要由机械手自身运动产生(搅水受力),此时来流速度V 等效为连杆单元的法向速度. 同时,机械手是一种多关节的串联机构,不同关节之间的运动引起的水动力之间存在耦合作用,这时单个连杆产生的惯性水动力由多个连杆关节间的相对运动引起,在此基础上可以应用Morison方程计算其水阻力与附加质量力[53 ] . 惯性水动力矩对关节驱动力矩的影响很小,一般只占1%甚至0.01%,但是随着机械手的自由度增加,关节的耦合作用对驱动力矩的影响变得更显著. 研究表明,6自由度的机械手关节1所受的最大瞬时惯性水动力矩可以达到驱动力矩的8%左右[54 ] . 因此,设计多自由度水下机械手时须考虑惯性水动力矩对关节1驱动力矩的影响. 另外,浮力也是一个重要的影响因素. 浮力矩可以达到陆地环境中驱动力矩的2/3[55 ] ;特别是对于高自重和大载重的机械手,由于浮力与质量成正比关系,浮力受到质量的显著影响,需要在动力学建模中对浮力矩项进行补偿. ...
水下机械手动力学模型及力矩影响研究
1
2017
... 目前,大量研究基于Morison方程建立静水环境下的惯性水动力学模型,但是静水假设与实际的工况环境存在差异,导致建模精度不够. 静水环境中水动力主要由机械手自身运动产生(搅水受力),此时来流速度V 等效为连杆单元的法向速度. 同时,机械手是一种多关节的串联机构,不同关节之间的运动引起的水动力之间存在耦合作用,这时单个连杆产生的惯性水动力由多个连杆关节间的相对运动引起,在此基础上可以应用Morison方程计算其水阻力与附加质量力[53 ] . 惯性水动力矩对关节驱动力矩的影响很小,一般只占1%甚至0.01%,但是随着机械手的自由度增加,关节的耦合作用对驱动力矩的影响变得更显著. 研究表明,6自由度的机械手关节1所受的最大瞬时惯性水动力矩可以达到驱动力矩的8%左右[54 ] . 因此,设计多自由度水下机械手时须考虑惯性水动力矩对关节1驱动力矩的影响. 另外,浮力也是一个重要的影响因素. 浮力矩可以达到陆地环境中驱动力矩的2/3[55 ] ;特别是对于高自重和大载重的机械手,由于浮力与质量成正比关系,浮力受到质量的显著影响,需要在动力学建模中对浮力矩项进行补偿. ...
Experimental study on advanced underwater robot control
1
2005
... 在实际的水况环境下,存在水流的干扰,并且水流流速具有非定常性. 在更为复杂的海况环境中,还会受到洋流、波浪等因素的干扰[56 ] . 在水流干扰下,机械手所受的水动力一部分来自于静水中自身运动导致的搅水受力,另一部分来自于水流对静止姿态的机械手的冲击力. 综合水下各种干扰因素对关节驱动力矩的影响,浮力矩影响最大,可以达到陆地环境中驱动力矩的1/3;水流冲击力矩次之,为1/100;自身搅水力矩最小,仅为1/10000 [57 ] . 在海浪环境中,机械手的水动力随时间和位置的变化而变化,来流速度为海浪速度减去机械手连杆的速度,这时需要的输入扭矩高于静水环境下2~3倍. 随着水深的增加,海浪环境和静水环境之间的差异逐渐变小;当水深为20 m时,需要的输入力矩和静水环境下几乎相同[58 ] . 因此,机械手所受的惯性水动力因水环境条件差异而呈现出不同程度的影响. 核电站水池、深海等环境中流速较慢的区域可以近似为静水环境,这时主要考虑浮力矩对驱动力矩的影响;对于多自由度机械手,还要考虑关节1的惯性水动力矩的影响. 在一般水况环境下,除了浮力矩外,还须考虑水流冲击力矩,特别是在流速较大的区域,冲击力矩显著增大. 在更为复杂的海况环境中,洋流、海浪引起的惯性水动力矩的影响更为明显,此时须加入相应的惯性水动力矩项. ...
流干扰下的水下机械手动力学建模分析
1
2011
... 在实际的水况环境下,存在水流的干扰,并且水流流速具有非定常性. 在更为复杂的海况环境中,还会受到洋流、波浪等因素的干扰[56 ] . 在水流干扰下,机械手所受的水动力一部分来自于静水中自身运动导致的搅水受力,另一部分来自于水流对静止姿态的机械手的冲击力. 综合水下各种干扰因素对关节驱动力矩的影响,浮力矩影响最大,可以达到陆地环境中驱动力矩的1/3;水流冲击力矩次之,为1/100;自身搅水力矩最小,仅为1/10000 [57 ] . 在海浪环境中,机械手的水动力随时间和位置的变化而变化,来流速度为海浪速度减去机械手连杆的速度,这时需要的输入扭矩高于静水环境下2~3倍. 随着水深的增加,海浪环境和静水环境之间的差异逐渐变小;当水深为20 m时,需要的输入力矩和静水环境下几乎相同[58 ] . 因此,机械手所受的惯性水动力因水环境条件差异而呈现出不同程度的影响. 核电站水池、深海等环境中流速较慢的区域可以近似为静水环境,这时主要考虑浮力矩对驱动力矩的影响;对于多自由度机械手,还要考虑关节1的惯性水动力矩的影响. 在一般水况环境下,除了浮力矩外,还须考虑水流冲击力矩,特别是在流速较大的区域,冲击力矩显著增大. 在更为复杂的海况环境中,洋流、海浪引起的惯性水动力矩的影响更为明显,此时须加入相应的惯性水动力矩项. ...
流干扰下的水下机械手动力学建模分析
1
2011
... 在实际的水况环境下,存在水流的干扰,并且水流流速具有非定常性. 在更为复杂的海况环境中,还会受到洋流、波浪等因素的干扰[56 ] . 在水流干扰下,机械手所受的水动力一部分来自于静水中自身运动导致的搅水受力,另一部分来自于水流对静止姿态的机械手的冲击力. 综合水下各种干扰因素对关节驱动力矩的影响,浮力矩影响最大,可以达到陆地环境中驱动力矩的1/3;水流冲击力矩次之,为1/100;自身搅水力矩最小,仅为1/10000 [57 ] . 在海浪环境中,机械手的水动力随时间和位置的变化而变化,来流速度为海浪速度减去机械手连杆的速度,这时需要的输入扭矩高于静水环境下2~3倍. 随着水深的增加,海浪环境和静水环境之间的差异逐渐变小;当水深为20 m时,需要的输入力矩和静水环境下几乎相同[58 ] . 因此,机械手所受的惯性水动力因水环境条件差异而呈现出不同程度的影响. 核电站水池、深海等环境中流速较慢的区域可以近似为静水环境,这时主要考虑浮力矩对驱动力矩的影响;对于多自由度机械手,还要考虑关节1的惯性水动力矩的影响. 在一般水况环境下,除了浮力矩外,还须考虑水流冲击力矩,特别是在流速较大的区域,冲击力矩显著增大. 在更为复杂的海况环境中,洋流、海浪引起的惯性水动力矩的影响更为明显,此时须加入相应的惯性水动力矩项. ...
Trajectory tracking control of two-joint underwater manipulator in ocean-wave environment
1
2024
... 在实际的水况环境下,存在水流的干扰,并且水流流速具有非定常性. 在更为复杂的海况环境中,还会受到洋流、波浪等因素的干扰[56 ] . 在水流干扰下,机械手所受的水动力一部分来自于静水中自身运动导致的搅水受力,另一部分来自于水流对静止姿态的机械手的冲击力. 综合水下各种干扰因素对关节驱动力矩的影响,浮力矩影响最大,可以达到陆地环境中驱动力矩的1/3;水流冲击力矩次之,为1/100;自身搅水力矩最小,仅为1/10000 [57 ] . 在海浪环境中,机械手的水动力随时间和位置的变化而变化,来流速度为海浪速度减去机械手连杆的速度,这时需要的输入扭矩高于静水环境下2~3倍. 随着水深的增加,海浪环境和静水环境之间的差异逐渐变小;当水深为20 m时,需要的输入力矩和静水环境下几乎相同[58 ] . 因此,机械手所受的惯性水动力因水环境条件差异而呈现出不同程度的影响. 核电站水池、深海等环境中流速较慢的区域可以近似为静水环境,这时主要考虑浮力矩对驱动力矩的影响;对于多自由度机械手,还要考虑关节1的惯性水动力矩的影响. 在一般水况环境下,除了浮力矩外,还须考虑水流冲击力矩,特别是在流速较大的区域,冲击力矩显著增大. 在更为复杂的海况环境中,洋流、海浪引起的惯性水动力矩的影响更为明显,此时须加入相应的惯性水动力矩项. ...
水下机械手动力学研究综述
1
2021
... 此外,惯性水动力系数C d 、C m 作为水动力学建模的重要参数,与机械手动力学模型的准确性呈正相关. 对于惯性水动力系数,不能直接从理论上求解,一般通过经验法、模型试验法、CFD仿真法获取[59 ] . 其中,CFD仿真法具有计算周期短、成本低、不存在尺度效应等优势,已成为机械手水动力分析中的主流方法. 惯性水动力系数不仅与水环境条件相关,而且受到机械手形状和运动状态的显著影响. 针对单自由度机械手在不同运动状态下的惯性水动力系数的变化规律,Kolodziejczyk[60 ] 提出一种惯性水动力系数归一化方法,其原理基于Sarpkaya[61 ] 的研究成果:惯性水动力系数仅与机械手的质心位移有关. 利用CFD仿真数据构建水动力系数的近似函数曲线,表明该方法有望根据一组运动学数据近似地模拟其余测试数据. 该方法还被进一步扩展到方形机械手上[62 ] . 此外,多自由度机械手的关节之间存在相对运动,不仅导致水动力的耦合作用,而且会对惯性水动力系数产生影响. 多自由度机械手的阻力系数既取决于机械手旋转关节的尺寸,也取决于关节之间的相对运动,其中关节角速度的影响尤为显著;而上述因素对附加质量力系数的影响基本可以忽略[63 ] . 因此,对于单自由度机械手的惯性水动力系数的求解,可以利用CFD仿真数据进行拟合,转化为以机械手的质心位移为自变量的函数;多自由度机械手的阻力系数由质心位移、关节角速度共同决定. ...
水下机械手动力学研究综述
1
2021
... 此外,惯性水动力系数C d 、C m 作为水动力学建模的重要参数,与机械手动力学模型的准确性呈正相关. 对于惯性水动力系数,不能直接从理论上求解,一般通过经验法、模型试验法、CFD仿真法获取[59 ] . 其中,CFD仿真法具有计算周期短、成本低、不存在尺度效应等优势,已成为机械手水动力分析中的主流方法. 惯性水动力系数不仅与水环境条件相关,而且受到机械手形状和运动状态的显著影响. 针对单自由度机械手在不同运动状态下的惯性水动力系数的变化规律,Kolodziejczyk[60 ] 提出一种惯性水动力系数归一化方法,其原理基于Sarpkaya[61 ] 的研究成果:惯性水动力系数仅与机械手的质心位移有关. 利用CFD仿真数据构建水动力系数的近似函数曲线,表明该方法有望根据一组运动学数据近似地模拟其余测试数据. 该方法还被进一步扩展到方形机械手上[62 ] . 此外,多自由度机械手的关节之间存在相对运动,不仅导致水动力的耦合作用,而且会对惯性水动力系数产生影响. 多自由度机械手的阻力系数既取决于机械手旋转关节的尺寸,也取决于关节之间的相对运动,其中关节角速度的影响尤为显著;而上述因素对附加质量力系数的影响基本可以忽略[63 ] . 因此,对于单自由度机械手的惯性水动力系数的求解,可以利用CFD仿真数据进行拟合,转化为以机械手的质心位移为自变量的函数;多自由度机械手的阻力系数由质心位移、关节角速度共同决定. ...
The method of determination of transient hydrodynamic coefficients for a single DOF underwater manipulator
1
2018
... 此外,惯性水动力系数C d 、C m 作为水动力学建模的重要参数,与机械手动力学模型的准确性呈正相关. 对于惯性水动力系数,不能直接从理论上求解,一般通过经验法、模型试验法、CFD仿真法获取[59 ] . 其中,CFD仿真法具有计算周期短、成本低、不存在尺度效应等优势,已成为机械手水动力分析中的主流方法. 惯性水动力系数不仅与水环境条件相关,而且受到机械手形状和运动状态的显著影响. 针对单自由度机械手在不同运动状态下的惯性水动力系数的变化规律,Kolodziejczyk[60 ] 提出一种惯性水动力系数归一化方法,其原理基于Sarpkaya[61 ] 的研究成果:惯性水动力系数仅与机械手的质心位移有关. 利用CFD仿真数据构建水动力系数的近似函数曲线,表明该方法有望根据一组运动学数据近似地模拟其余测试数据. 该方法还被进一步扩展到方形机械手上[62 ] . 此外,多自由度机械手的关节之间存在相对运动,不仅导致水动力的耦合作用,而且会对惯性水动力系数产生影响. 多自由度机械手的阻力系数既取决于机械手旋转关节的尺寸,也取决于关节之间的相对运动,其中关节角速度的影响尤为显著;而上述因素对附加质量力系数的影响基本可以忽略[63 ] . 因此,对于单自由度机械手的惯性水动力系数的求解,可以利用CFD仿真数据进行拟合,转化为以机械手的质心位移为自变量的函数;多自由度机械手的阻力系数由质心位移、关节角速度共同决定. ...
Lift, drag, and added-mass coefficients for a circular cylinder immersed in a time-dependent flow
1
1963
... 此外,惯性水动力系数C d 、C m 作为水动力学建模的重要参数,与机械手动力学模型的准确性呈正相关. 对于惯性水动力系数,不能直接从理论上求解,一般通过经验法、模型试验法、CFD仿真法获取[59 ] . 其中,CFD仿真法具有计算周期短、成本低、不存在尺度效应等优势,已成为机械手水动力分析中的主流方法. 惯性水动力系数不仅与水环境条件相关,而且受到机械手形状和运动状态的显著影响. 针对单自由度机械手在不同运动状态下的惯性水动力系数的变化规律,Kolodziejczyk[60 ] 提出一种惯性水动力系数归一化方法,其原理基于Sarpkaya[61 ] 的研究成果:惯性水动力系数仅与机械手的质心位移有关. 利用CFD仿真数据构建水动力系数的近似函数曲线,表明该方法有望根据一组运动学数据近似地模拟其余测试数据. 该方法还被进一步扩展到方形机械手上[62 ] . 此外,多自由度机械手的关节之间存在相对运动,不仅导致水动力的耦合作用,而且会对惯性水动力系数产生影响. 多自由度机械手的阻力系数既取决于机械手旋转关节的尺寸,也取决于关节之间的相对运动,其中关节角速度的影响尤为显著;而上述因素对附加质量力系数的影响基本可以忽略[63 ] . 因此,对于单自由度机械手的惯性水动力系数的求解,可以利用CFD仿真数据进行拟合,转化为以机械手的质心位移为自变量的函数;多自由度机械手的阻力系数由质心位移、关节角速度共同决定. ...
Transient hydrodynamic coefficients for a single DOF underwater manipulator of a square cross-section
1
2023
... 此外,惯性水动力系数C d 、C m 作为水动力学建模的重要参数,与机械手动力学模型的准确性呈正相关. 对于惯性水动力系数,不能直接从理论上求解,一般通过经验法、模型试验法、CFD仿真法获取[59 ] . 其中,CFD仿真法具有计算周期短、成本低、不存在尺度效应等优势,已成为机械手水动力分析中的主流方法. 惯性水动力系数不仅与水环境条件相关,而且受到机械手形状和运动状态的显著影响. 针对单自由度机械手在不同运动状态下的惯性水动力系数的变化规律,Kolodziejczyk[60 ] 提出一种惯性水动力系数归一化方法,其原理基于Sarpkaya[61 ] 的研究成果:惯性水动力系数仅与机械手的质心位移有关. 利用CFD仿真数据构建水动力系数的近似函数曲线,表明该方法有望根据一组运动学数据近似地模拟其余测试数据. 该方法还被进一步扩展到方形机械手上[62 ] . 此外,多自由度机械手的关节之间存在相对运动,不仅导致水动力的耦合作用,而且会对惯性水动力系数产生影响. 多自由度机械手的阻力系数既取决于机械手旋转关节的尺寸,也取决于关节之间的相对运动,其中关节角速度的影响尤为显著;而上述因素对附加质量力系数的影响基本可以忽略[63 ] . 因此,对于单自由度机械手的惯性水动力系数的求解,可以利用CFD仿真数据进行拟合,转化为以机械手的质心位移为自变量的函数;多自由度机械手的阻力系数由质心位移、关节角速度共同决定. ...
Transient hydrodynamics coefficients analysis of a six-degree-of-freedom underwater manipulator
1
2024
... 此外,惯性水动力系数C d 、C m 作为水动力学建模的重要参数,与机械手动力学模型的准确性呈正相关. 对于惯性水动力系数,不能直接从理论上求解,一般通过经验法、模型试验法、CFD仿真法获取[59 ] . 其中,CFD仿真法具有计算周期短、成本低、不存在尺度效应等优势,已成为机械手水动力分析中的主流方法. 惯性水动力系数不仅与水环境条件相关,而且受到机械手形状和运动状态的显著影响. 针对单自由度机械手在不同运动状态下的惯性水动力系数的变化规律,Kolodziejczyk[60 ] 提出一种惯性水动力系数归一化方法,其原理基于Sarpkaya[61 ] 的研究成果:惯性水动力系数仅与机械手的质心位移有关. 利用CFD仿真数据构建水动力系数的近似函数曲线,表明该方法有望根据一组运动学数据近似地模拟其余测试数据. 该方法还被进一步扩展到方形机械手上[62 ] . 此外,多自由度机械手的关节之间存在相对运动,不仅导致水动力的耦合作用,而且会对惯性水动力系数产生影响. 多自由度机械手的阻力系数既取决于机械手旋转关节的尺寸,也取决于关节之间的相对运动,其中关节角速度的影响尤为显著;而上述因素对附加质量力系数的影响基本可以忽略[63 ] . 因此,对于单自由度机械手的惯性水动力系数的求解,可以利用CFD仿真数据进行拟合,转化为以机械手的质心位移为自变量的函数;多自由度机械手的阻力系数由质心位移、关节角速度共同决定. ...
1
... 黏性水动力主要由位置力、旋转力和耦合力组成,可以表示为力与力矩的六维分量F v =[X , Y , Z , K , M , N ]T ,其中位置力与线速度有关,旋转力与角速度有关,耦合力是多个运动要素共同作用的结果. 建立黏性水动力模型,通常是建立黏性水动力的六维分量与位置力、旋转力和耦合力系数的数学关系式. 针对单自由度水下机械手的黏性水动力建模,刘晓瑜[64 ] 对黏性水动力的数学关系式进行Taylor展开,建立了含有位置力、旋转力及耦合力的黏性水动力模型. 然而,对于多关节的机械手,仍然缺少经过大量试验验证、并被广泛认可的黏性水动力建模方法. ...
1
... 黏性水动力主要由位置力、旋转力和耦合力组成,可以表示为力与力矩的六维分量F v =[X , Y , Z , K , M , N ]T ,其中位置力与线速度有关,旋转力与角速度有关,耦合力是多个运动要素共同作用的结果. 建立黏性水动力模型,通常是建立黏性水动力的六维分量与位置力、旋转力和耦合力系数的数学关系式. 针对单自由度水下机械手的黏性水动力建模,刘晓瑜[64 ] 对黏性水动力的数学关系式进行Taylor展开,建立了含有位置力、旋转力及耦合力的黏性水动力模型. 然而,对于多关节的机械手,仍然缺少经过大量试验验证、并被广泛认可的黏性水动力建模方法. ...
水下机器人水动力参数CFD计算及操纵性预报
1
2023
... 黏性水动力系数数量众多,测定较为困难,可以通过模型试验方法、经验法、CFD仿真法以及系统参数辨识法获取[65 ] . 模型试验是目前获得黏性水动力系数的主要方式,其中位置力系数一般通过风洞或斜航试验获得,旋转力及耦合力系数主要通过悬臂水池试验获得[66 ] . 针对水下机械手的模型试验,Filaretov等[67 ] 利用一种借助空气动力学的气动隧道试验方法测定多连杆水下机械手的黏性水动力系数,但是该模型的试验成本高、周期长,不利于水下机械手的设计与研究. 由于很少有研究采用试验方法获取水下机械手的黏性水动力系数,而试验数据的缺少不利于经验法以及系统参数辨识法获取黏性水动力系数,CFD仿真法在黏性水动力系数的获取中逐渐成为不可或缺的工具. 针对单自由度水下机械手,可以借助CFD仿真模拟低速风洞试验来获得位置力系数,通过测量水下机械手在不同旋转角速度下所受的黏性水动力计算得到旋转力系数;耦合力系数的计算更为复杂,须结合机械手在水环境中的α 角(旋转角度)、β 角(机械手与来流方向的夹角)以及不同角速度下的运动状态,进行瞬态迭代计算,并测量各运动状态下的黏性水动力[68 ] . ...
水下机器人水动力参数CFD计算及操纵性预报
1
2023
... 黏性水动力系数数量众多,测定较为困难,可以通过模型试验方法、经验法、CFD仿真法以及系统参数辨识法获取[65 ] . 模型试验是目前获得黏性水动力系数的主要方式,其中位置力系数一般通过风洞或斜航试验获得,旋转力及耦合力系数主要通过悬臂水池试验获得[66 ] . 针对水下机械手的模型试验,Filaretov等[67 ] 利用一种借助空气动力学的气动隧道试验方法测定多连杆水下机械手的黏性水动力系数,但是该模型的试验成本高、周期长,不利于水下机械手的设计与研究. 由于很少有研究采用试验方法获取水下机械手的黏性水动力系数,而试验数据的缺少不利于经验法以及系统参数辨识法获取黏性水动力系数,CFD仿真法在黏性水动力系数的获取中逐渐成为不可或缺的工具. 针对单自由度水下机械手,可以借助CFD仿真模拟低速风洞试验来获得位置力系数,通过测量水下机械手在不同旋转角速度下所受的黏性水动力计算得到旋转力系数;耦合力系数的计算更为复杂,须结合机械手在水环境中的α 角(旋转角度)、β 角(机械手与来流方向的夹角)以及不同角速度下的运动状态,进行瞬态迭代计算,并测量各运动状态下的黏性水动力[68 ] . ...
水下机器人粘性类水动力数值计算方法研究
1
2007
... 黏性水动力系数数量众多,测定较为困难,可以通过模型试验方法、经验法、CFD仿真法以及系统参数辨识法获取[65 ] . 模型试验是目前获得黏性水动力系数的主要方式,其中位置力系数一般通过风洞或斜航试验获得,旋转力及耦合力系数主要通过悬臂水池试验获得[66 ] . 针对水下机械手的模型试验,Filaretov等[67 ] 利用一种借助空气动力学的气动隧道试验方法测定多连杆水下机械手的黏性水动力系数,但是该模型的试验成本高、周期长,不利于水下机械手的设计与研究. 由于很少有研究采用试验方法获取水下机械手的黏性水动力系数,而试验数据的缺少不利于经验法以及系统参数辨识法获取黏性水动力系数,CFD仿真法在黏性水动力系数的获取中逐渐成为不可或缺的工具. 针对单自由度水下机械手,可以借助CFD仿真模拟低速风洞试验来获得位置力系数,通过测量水下机械手在不同旋转角速度下所受的黏性水动力计算得到旋转力系数;耦合力系数的计算更为复杂,须结合机械手在水环境中的α 角(旋转角度)、β 角(机械手与来流方向的夹角)以及不同角速度下的运动状态,进行瞬态迭代计算,并测量各运动状态下的黏性水动力[68 ] . ...
水下机器人粘性类水动力数值计算方法研究
1
2007
... 黏性水动力系数数量众多,测定较为困难,可以通过模型试验方法、经验法、CFD仿真法以及系统参数辨识法获取[65 ] . 模型试验是目前获得黏性水动力系数的主要方式,其中位置力系数一般通过风洞或斜航试验获得,旋转力及耦合力系数主要通过悬臂水池试验获得[66 ] . 针对水下机械手的模型试验,Filaretov等[67 ] 利用一种借助空气动力学的气动隧道试验方法测定多连杆水下机械手的黏性水动力系数,但是该模型的试验成本高、周期长,不利于水下机械手的设计与研究. 由于很少有研究采用试验方法获取水下机械手的黏性水动力系数,而试验数据的缺少不利于经验法以及系统参数辨识法获取黏性水动力系数,CFD仿真法在黏性水动力系数的获取中逐渐成为不可或缺的工具. 针对单自由度水下机械手,可以借助CFD仿真模拟低速风洞试验来获得位置力系数,通过测量水下机械手在不同旋转角速度下所受的黏性水动力计算得到旋转力系数;耦合力系数的计算更为复杂,须结合机械手在水环境中的α 角(旋转角度)、β 角(机械手与来流方向的夹角)以及不同角速度下的运动状态,进行瞬态迭代计算,并测量各运动状态下的黏性水动力[68 ] . ...
Experimental determination of the viscous friction coefficients for calculation of the force impacts on the moving links of the underwater manipulators
1
2015
... 黏性水动力系数数量众多,测定较为困难,可以通过模型试验方法、经验法、CFD仿真法以及系统参数辨识法获取[65 ] . 模型试验是目前获得黏性水动力系数的主要方式,其中位置力系数一般通过风洞或斜航试验获得,旋转力及耦合力系数主要通过悬臂水池试验获得[66 ] . 针对水下机械手的模型试验,Filaretov等[67 ] 利用一种借助空气动力学的气动隧道试验方法测定多连杆水下机械手的黏性水动力系数,但是该模型的试验成本高、周期长,不利于水下机械手的设计与研究. 由于很少有研究采用试验方法获取水下机械手的黏性水动力系数,而试验数据的缺少不利于经验法以及系统参数辨识法获取黏性水动力系数,CFD仿真法在黏性水动力系数的获取中逐渐成为不可或缺的工具. 针对单自由度水下机械手,可以借助CFD仿真模拟低速风洞试验来获得位置力系数,通过测量水下机械手在不同旋转角速度下所受的黏性水动力计算得到旋转力系数;耦合力系数的计算更为复杂,须结合机械手在水环境中的α 角(旋转角度)、β 角(机械手与来流方向的夹角)以及不同角速度下的运动状态,进行瞬态迭代计算,并测量各运动状态下的黏性水动力[68 ] . ...
Modeling analysis and simulation of viscous hydrodynamic model of single-DOF manipulator
1
2019
... 黏性水动力系数数量众多,测定较为困难,可以通过模型试验方法、经验法、CFD仿真法以及系统参数辨识法获取[65 ] . 模型试验是目前获得黏性水动力系数的主要方式,其中位置力系数一般通过风洞或斜航试验获得,旋转力及耦合力系数主要通过悬臂水池试验获得[66 ] . 针对水下机械手的模型试验,Filaretov等[67 ] 利用一种借助空气动力学的气动隧道试验方法测定多连杆水下机械手的黏性水动力系数,但是该模型的试验成本高、周期长,不利于水下机械手的设计与研究. 由于很少有研究采用试验方法获取水下机械手的黏性水动力系数,而试验数据的缺少不利于经验法以及系统参数辨识法获取黏性水动力系数,CFD仿真法在黏性水动力系数的获取中逐渐成为不可或缺的工具. 针对单自由度水下机械手,可以借助CFD仿真模拟低速风洞试验来获得位置力系数,通过测量水下机械手在不同旋转角速度下所受的黏性水动力计算得到旋转力系数;耦合力系数的计算更为复杂,须结合机械手在水环境中的α 角(旋转角度)、β 角(机械手与来流方向的夹角)以及不同角速度下的运动状态,进行瞬态迭代计算,并测量各运动状态下的黏性水动力[68 ] . ...
水下机械手控制系统研究
1
2009
... 1) PID控制. PID控制由比例、积分、微分3个部分的控制器组成,具有结构简单、鲁棒性好、可靠性高等优点. 针对水下作业任务中电动机械手对控制系统的实时性和高精度要求,安江波等[69 ] 设计双闭环PID控制系统,对速度、位置物理量进行调节,这种方式能够兼顾静态精度与动态特性. 为了进一步加强机械手位置控制的精度,程尉[70 ] 提出三闭环反馈PID控制系统,通过在位置环内嵌电流环和速度环进行PID调节. 然而,如果多闭环系统的内环调节不当,反而会造成更大的误差. PID控制的自适应性较弱,水流扰动会导致系统的动态响应特性发生变化,且难以通过参数调节消除误差. ...
水下机械手控制系统研究
1
2009
... 1) PID控制. PID控制由比例、积分、微分3个部分的控制器组成,具有结构简单、鲁棒性好、可靠性高等优点. 针对水下作业任务中电动机械手对控制系统的实时性和高精度要求,安江波等[69 ] 设计双闭环PID控制系统,对速度、位置物理量进行调节,这种方式能够兼顾静态精度与动态特性. 为了进一步加强机械手位置控制的精度,程尉[70 ] 提出三闭环反馈PID控制系统,通过在位置环内嵌电流环和速度环进行PID调节. 然而,如果多闭环系统的内环调节不当,反而会造成更大的误差. PID控制的自适应性较弱,水流扰动会导致系统的动态响应特性发生变化,且难以通过参数调节消除误差. ...
1
... 1) PID控制. PID控制由比例、积分、微分3个部分的控制器组成,具有结构简单、鲁棒性好、可靠性高等优点. 针对水下作业任务中电动机械手对控制系统的实时性和高精度要求,安江波等[69 ] 设计双闭环PID控制系统,对速度、位置物理量进行调节,这种方式能够兼顾静态精度与动态特性. 为了进一步加强机械手位置控制的精度,程尉[70 ] 提出三闭环反馈PID控制系统,通过在位置环内嵌电流环和速度环进行PID调节. 然而,如果多闭环系统的内环调节不当,反而会造成更大的误差. PID控制的自适应性较弱,水流扰动会导致系统的动态响应特性发生变化,且难以通过参数调节消除误差. ...
1
... 1) PID控制. PID控制由比例、积分、微分3个部分的控制器组成,具有结构简单、鲁棒性好、可靠性高等优点. 针对水下作业任务中电动机械手对控制系统的实时性和高精度要求,安江波等[69 ] 设计双闭环PID控制系统,对速度、位置物理量进行调节,这种方式能够兼顾静态精度与动态特性. 为了进一步加强机械手位置控制的精度,程尉[70 ] 提出三闭环反馈PID控制系统,通过在位置环内嵌电流环和速度环进行PID调节. 然而,如果多闭环系统的内环调节不当,反而会造成更大的误差. PID控制的自适应性较弱,水流扰动会导致系统的动态响应特性发生变化,且难以通过参数调节消除误差. ...
1
... 2) 自适应控制. 自适应控制基于测量信号对系统的不确定参数进行自动调整,可以在洋流、传感器噪声等干扰下的动态变化场景中实现更高的自主性并有效地补偿误差. 水流的干扰和航行器运动导致的干扰具有不确定性,如洋流流速变化、低通滤波器参数变化等,因此自适应控制极度依赖系统动态模型或实时参数更新. Yuh等[71 ] 设计带有扰动观测器的自适应控制方式,实现了扰动偏差自动补偿,机械手的轨迹误差仅为10−3 rad左右. 在存在洋流干扰或参数不确定的情形下,复杂的轨迹规划与抓取/放置操作对系统的鲁棒性提出了更高要求. 为此,Santhakumar[72 ] 提出带有非线性扰动观测器的自适应控制方案. 相较于传统扰动观测器,非线性扰动观测器在估计非线性未知扰动方面更具优势. ...
A nonregressor nonlinear disturbance observer-based adaptive control scheme for an underwater manipulator
1
2013
... 2) 自适应控制. 自适应控制基于测量信号对系统的不确定参数进行自动调整,可以在洋流、传感器噪声等干扰下的动态变化场景中实现更高的自主性并有效地补偿误差. 水流的干扰和航行器运动导致的干扰具有不确定性,如洋流流速变化、低通滤波器参数变化等,因此自适应控制极度依赖系统动态模型或实时参数更新. Yuh等[71 ] 设计带有扰动观测器的自适应控制方式,实现了扰动偏差自动补偿,机械手的轨迹误差仅为10−3 rad左右. 在存在洋流干扰或参数不确定的情形下,复杂的轨迹规划与抓取/放置操作对系统的鲁棒性提出了更高要求. 为此,Santhakumar[72 ] 提出带有非线性扰动观测器的自适应控制方案. 相较于传统扰动观测器,非线性扰动观测器在估计非线性未知扰动方面更具优势. ...
1
... 3) 滑模控制. 滑模控制通过设计滑模面,将系统状态驱动到滑模面上,并在该面上执行控制,实现对系统的稳定控制. 在克服系统的抖振问题并保证在有限时间内收敛的前提下,滑模控制仍然是对系统的参数变化及外部干扰快速响应的有效方案. 在处理变载荷和模型不确定性问题时,Xu等[73 ] 提出一种高精度的滑模控制方案,通过指数趋近律提高系统的控制精度,并引入饱和函数来处理抖振问题. 在机械手轨迹跟踪试验中,相较于PID控制方法,该滑模控制方案展现出更强的鲁棒性. 由于工程应用中的滑模控制无法保证在有限时间内收敛,Venkatesan等[74 ] 提出基于终端滑模的水下机械手控制方法,使用非线性函数来创建滑动表面,并设计干扰观测器对外界干扰和系统不确定性进行观测和补偿;在水流干扰下的机械手定位任务中,各关节角度误差为10−2 rad. ...
1
... 3) 滑模控制. 滑模控制通过设计滑模面,将系统状态驱动到滑模面上,并在该面上执行控制,实现对系统的稳定控制. 在克服系统的抖振问题并保证在有限时间内收敛的前提下,滑模控制仍然是对系统的参数变化及外部干扰快速响应的有效方案. 在处理变载荷和模型不确定性问题时,Xu等[73 ] 提出一种高精度的滑模控制方案,通过指数趋近律提高系统的控制精度,并引入饱和函数来处理抖振问题. 在机械手轨迹跟踪试验中,相较于PID控制方法,该滑模控制方案展现出更强的鲁棒性. 由于工程应用中的滑模控制无法保证在有限时间内收敛,Venkatesan等[74 ] 提出基于终端滑模的水下机械手控制方法,使用非线性函数来创建滑动表面,并设计干扰观测器对外界干扰和系统不确定性进行观测和补偿;在水流干扰下的机械手定位任务中,各关节角度误差为10−2 rad. ...
水下作业液压机械手夹持力模糊控制技术的研究
1
2001
... 4) 模糊控制. 模糊控制是模仿人类思维进行控制的方式,通过专家的经验知识对外界环境干扰等难以精确建模的因素进行补偿,其控制精度由经验总结的完善程度决定.由于电液伺服系统控制的水下作业机械手的夹持力容易受到压力、温度等变化的影响,谭定忠等[75 ] 设计引入智能权函数的模糊控制器,对参数进行自动调整,实现了对机械手手爪夹持力的稳定控制. 此外,不精确的多关节机械手动力学模型常导致计算力矩法控制的鲁棒性差. 可以将模糊控制与计算力矩控制结合,其中计算力矩部分作为前馈环节,模糊系统作为补偿环节,对模型的不精确部分进行自适应补偿[76 ] . ...
水下作业液压机械手夹持力模糊控制技术的研究
1
2001
... 4) 模糊控制. 模糊控制是模仿人类思维进行控制的方式,通过专家的经验知识对外界环境干扰等难以精确建模的因素进行补偿,其控制精度由经验总结的完善程度决定.由于电液伺服系统控制的水下作业机械手的夹持力容易受到压力、温度等变化的影响,谭定忠等[75 ] 设计引入智能权函数的模糊控制器,对参数进行自动调整,实现了对机械手手爪夹持力的稳定控制. 此外,不精确的多关节机械手动力学模型常导致计算力矩法控制的鲁棒性差. 可以将模糊控制与计算力矩控制结合,其中计算力矩部分作为前馈环节,模糊系统作为补偿环节,对模型的不精确部分进行自适应补偿[76 ] . ...
基于模糊补偿的七自由度机械手轨迹跟踪控制
1
2012
... 4) 模糊控制. 模糊控制是模仿人类思维进行控制的方式,通过专家的经验知识对外界环境干扰等难以精确建模的因素进行补偿,其控制精度由经验总结的完善程度决定.由于电液伺服系统控制的水下作业机械手的夹持力容易受到压力、温度等变化的影响,谭定忠等[75 ] 设计引入智能权函数的模糊控制器,对参数进行自动调整,实现了对机械手手爪夹持力的稳定控制. 此外,不精确的多关节机械手动力学模型常导致计算力矩法控制的鲁棒性差. 可以将模糊控制与计算力矩控制结合,其中计算力矩部分作为前馈环节,模糊系统作为补偿环节,对模型的不精确部分进行自适应补偿[76 ] . ...
基于模糊补偿的七自由度机械手轨迹跟踪控制
1
2012
... 4) 模糊控制. 模糊控制是模仿人类思维进行控制的方式,通过专家的经验知识对外界环境干扰等难以精确建模的因素进行补偿,其控制精度由经验总结的完善程度决定.由于电液伺服系统控制的水下作业机械手的夹持力容易受到压力、温度等变化的影响,谭定忠等[75 ] 设计引入智能权函数的模糊控制器,对参数进行自动调整,实现了对机械手手爪夹持力的稳定控制. 此外,不精确的多关节机械手动力学模型常导致计算力矩法控制的鲁棒性差. 可以将模糊控制与计算力矩控制结合,其中计算力矩部分作为前馈环节,模糊系统作为补偿环节,对模型的不精确部分进行自适应补偿[76 ] . ...
1
... 5) 神经网络控制. 神经网络控制具有很强的适应性和学习能力,能够有效地逼近模型中不确定系统的非线性部分,并灵活适应变化的水下环境. 在水下航行器-机械手系统中,航行器与机械手之间的交互被视为外部干扰,这种干扰在模型中很难用精确的数学关系式来表示,而通过神经网络能够很好地识别系统中涉及的非线性干扰[77 ] . 同样,水下柔性伸缩机械手动力学建模过程中存在许多非线性因素,特别是在精确描述水下扰动转矩方面. Shang等[78 ] 利用径向基函数(radial basis function, RBF)神经网络策略识别并补偿不同水流条件下的水下扰动转矩;相较于PID控制,RBF神经网络控制使跟踪误差的平均值降低了15.59%. ...
Rotation tracking control strategy of underwater flexible telescopic manipulator based on neural network compensation for water environment disturbance
1
2023
... 5) 神经网络控制. 神经网络控制具有很强的适应性和学习能力,能够有效地逼近模型中不确定系统的非线性部分,并灵活适应变化的水下环境. 在水下航行器-机械手系统中,航行器与机械手之间的交互被视为外部干扰,这种干扰在模型中很难用精确的数学关系式来表示,而通过神经网络能够很好地识别系统中涉及的非线性干扰[77 ] . 同样,水下柔性伸缩机械手动力学建模过程中存在许多非线性因素,特别是在精确描述水下扰动转矩方面. Shang等[78 ] 利用径向基函数(radial basis function, RBF)神经网络策略识别并补偿不同水流条件下的水下扰动转矩;相较于PID控制,RBF神经网络控制使跟踪误差的平均值降低了15.59%. ...
基于Fuzzy-PID的水下作业机械手控制系统设计
1
2005
... 6) 复合控制. 单一控制方式各有优缺点,可以加以融合,提供更加稳定、高效的控制策略. 为了弥补PID控制在自适应能力和动态特性上的不足,王立权等[79 ] 设计模糊PID控制方式,通过模糊控制原理对PID的比例、积分、微分参数进行在线修改,调节速度比单一PID控制快了1倍. 神经网络控制也常被加入到PID控制中,例如,小脑模型关节控制器神经网络作为PID控制中的前馈环节,通过学习不断逼近期望的输出力矩,从而在水流干扰及变载荷情况下将机械手抓放操作的轨迹跟踪误差控制在< 0.01 rad[80 ] . 在系统建模过程中,往往只能对已建模项进行补偿,难以抑制未建模的干扰,而复合控制可以通过多种方式分别对已建模项和未建模的干扰进行补偿. 针对自适应滑模控制系统的未建模项,付雯等[81 ] 采用RBF神经网络,并通过动力学模型进行补偿,抑制了系统振动,使得各关节轨迹跟踪误差仅为10−3 rad. 此外,复合控制可以根据不同的参数不确定项选择合适的方式进行逼近或补偿. 高阳等[82 ] 采用分块RBF神经网络逼近动力学模型中的参数不确定项,利用模糊控制对非参数不确定项中的摩擦力进行补偿. 结果显示,与单一的滑模控制、整体RBF神经网络控制、分块RBF神经网络控制相比,该方法使系统平均误差分别降低了85.5%、71.8%、93.1%. ...
基于Fuzzy-PID的水下作业机械手控制系统设计
1
2005
... 6) 复合控制. 单一控制方式各有优缺点,可以加以融合,提供更加稳定、高效的控制策略. 为了弥补PID控制在自适应能力和动态特性上的不足,王立权等[79 ] 设计模糊PID控制方式,通过模糊控制原理对PID的比例、积分、微分参数进行在线修改,调节速度比单一PID控制快了1倍. 神经网络控制也常被加入到PID控制中,例如,小脑模型关节控制器神经网络作为PID控制中的前馈环节,通过学习不断逼近期望的输出力矩,从而在水流干扰及变载荷情况下将机械手抓放操作的轨迹跟踪误差控制在< 0.01 rad[80 ] . 在系统建模过程中,往往只能对已建模项进行补偿,难以抑制未建模的干扰,而复合控制可以通过多种方式分别对已建模项和未建模的干扰进行补偿. 针对自适应滑模控制系统的未建模项,付雯等[81 ] 采用RBF神经网络,并通过动力学模型进行补偿,抑制了系统振动,使得各关节轨迹跟踪误差仅为10−3 rad. 此外,复合控制可以根据不同的参数不确定项选择合适的方式进行逼近或补偿. 高阳等[82 ] 采用分块RBF神经网络逼近动力学模型中的参数不确定项,利用模糊控制对非参数不确定项中的摩擦力进行补偿. 结果显示,与单一的滑模控制、整体RBF神经网络控制、分块RBF神经网络控制相比,该方法使系统平均误差分别降低了85.5%、71.8%、93.1%. ...
基于小脑模型关节控制器的水下机械手复合运动控制的研究及仿真
1
2008
... 6) 复合控制. 单一控制方式各有优缺点,可以加以融合,提供更加稳定、高效的控制策略. 为了弥补PID控制在自适应能力和动态特性上的不足,王立权等[79 ] 设计模糊PID控制方式,通过模糊控制原理对PID的比例、积分、微分参数进行在线修改,调节速度比单一PID控制快了1倍. 神经网络控制也常被加入到PID控制中,例如,小脑模型关节控制器神经网络作为PID控制中的前馈环节,通过学习不断逼近期望的输出力矩,从而在水流干扰及变载荷情况下将机械手抓放操作的轨迹跟踪误差控制在< 0.01 rad[80 ] . 在系统建模过程中,往往只能对已建模项进行补偿,难以抑制未建模的干扰,而复合控制可以通过多种方式分别对已建模项和未建模的干扰进行补偿. 针对自适应滑模控制系统的未建模项,付雯等[81 ] 采用RBF神经网络,并通过动力学模型进行补偿,抑制了系统振动,使得各关节轨迹跟踪误差仅为10−3 rad. 此外,复合控制可以根据不同的参数不确定项选择合适的方式进行逼近或补偿. 高阳等[82 ] 采用分块RBF神经网络逼近动力学模型中的参数不确定项,利用模糊控制对非参数不确定项中的摩擦力进行补偿. 结果显示,与单一的滑模控制、整体RBF神经网络控制、分块RBF神经网络控制相比,该方法使系统平均误差分别降低了85.5%、71.8%、93.1%. ...
基于小脑模型关节控制器的水下机械手复合运动控制的研究及仿真
1
2008
... 6) 复合控制. 单一控制方式各有优缺点,可以加以融合,提供更加稳定、高效的控制策略. 为了弥补PID控制在自适应能力和动态特性上的不足,王立权等[79 ] 设计模糊PID控制方式,通过模糊控制原理对PID的比例、积分、微分参数进行在线修改,调节速度比单一PID控制快了1倍. 神经网络控制也常被加入到PID控制中,例如,小脑模型关节控制器神经网络作为PID控制中的前馈环节,通过学习不断逼近期望的输出力矩,从而在水流干扰及变载荷情况下将机械手抓放操作的轨迹跟踪误差控制在< 0.01 rad[80 ] . 在系统建模过程中,往往只能对已建模项进行补偿,难以抑制未建模的干扰,而复合控制可以通过多种方式分别对已建模项和未建模的干扰进行补偿. 针对自适应滑模控制系统的未建模项,付雯等[81 ] 采用RBF神经网络,并通过动力学模型进行补偿,抑制了系统振动,使得各关节轨迹跟踪误差仅为10−3 rad. 此外,复合控制可以根据不同的参数不确定项选择合适的方式进行逼近或补偿. 高阳等[82 ] 采用分块RBF神经网络逼近动力学模型中的参数不确定项,利用模糊控制对非参数不确定项中的摩擦力进行补偿. 结果显示,与单一的滑模控制、整体RBF神经网络控制、分块RBF神经网络控制相比,该方法使系统平均误差分别降低了85.5%、71.8%、93.1%. ...
基于非线性动力学模型补偿的水下机械臂自适应滑模控制
1
2023
... 6) 复合控制. 单一控制方式各有优缺点,可以加以融合,提供更加稳定、高效的控制策略. 为了弥补PID控制在自适应能力和动态特性上的不足,王立权等[79 ] 设计模糊PID控制方式,通过模糊控制原理对PID的比例、积分、微分参数进行在线修改,调节速度比单一PID控制快了1倍. 神经网络控制也常被加入到PID控制中,例如,小脑模型关节控制器神经网络作为PID控制中的前馈环节,通过学习不断逼近期望的输出力矩,从而在水流干扰及变载荷情况下将机械手抓放操作的轨迹跟踪误差控制在< 0.01 rad[80 ] . 在系统建模过程中,往往只能对已建模项进行补偿,难以抑制未建模的干扰,而复合控制可以通过多种方式分别对已建模项和未建模的干扰进行补偿. 针对自适应滑模控制系统的未建模项,付雯等[81 ] 采用RBF神经网络,并通过动力学模型进行补偿,抑制了系统振动,使得各关节轨迹跟踪误差仅为10−3 rad. 此外,复合控制可以根据不同的参数不确定项选择合适的方式进行逼近或补偿. 高阳等[82 ] 采用分块RBF神经网络逼近动力学模型中的参数不确定项,利用模糊控制对非参数不确定项中的摩擦力进行补偿. 结果显示,与单一的滑模控制、整体RBF神经网络控制、分块RBF神经网络控制相比,该方法使系统平均误差分别降低了85.5%、71.8%、93.1%. ...
基于非线性动力学模型补偿的水下机械臂自适应滑模控制
1
2023
... 6) 复合控制. 单一控制方式各有优缺点,可以加以融合,提供更加稳定、高效的控制策略. 为了弥补PID控制在自适应能力和动态特性上的不足,王立权等[79 ] 设计模糊PID控制方式,通过模糊控制原理对PID的比例、积分、微分参数进行在线修改,调节速度比单一PID控制快了1倍. 神经网络控制也常被加入到PID控制中,例如,小脑模型关节控制器神经网络作为PID控制中的前馈环节,通过学习不断逼近期望的输出力矩,从而在水流干扰及变载荷情况下将机械手抓放操作的轨迹跟踪误差控制在< 0.01 rad[80 ] . 在系统建模过程中,往往只能对已建模项进行补偿,难以抑制未建模的干扰,而复合控制可以通过多种方式分别对已建模项和未建模的干扰进行补偿. 针对自适应滑模控制系统的未建模项,付雯等[81 ] 采用RBF神经网络,并通过动力学模型进行补偿,抑制了系统振动,使得各关节轨迹跟踪误差仅为10−3 rad. 此外,复合控制可以根据不同的参数不确定项选择合适的方式进行逼近或补偿. 高阳等[82 ] 采用分块RBF神经网络逼近动力学模型中的参数不确定项,利用模糊控制对非参数不确定项中的摩擦力进行补偿. 结果显示,与单一的滑模控制、整体RBF神经网络控制、分块RBF神经网络控制相比,该方法使系统平均误差分别降低了85.5%、71.8%、93.1%. ...
基于神经网络和模糊补偿的水下机械臂控制
1
2022
... 6) 复合控制. 单一控制方式各有优缺点,可以加以融合,提供更加稳定、高效的控制策略. 为了弥补PID控制在自适应能力和动态特性上的不足,王立权等[79 ] 设计模糊PID控制方式,通过模糊控制原理对PID的比例、积分、微分参数进行在线修改,调节速度比单一PID控制快了1倍. 神经网络控制也常被加入到PID控制中,例如,小脑模型关节控制器神经网络作为PID控制中的前馈环节,通过学习不断逼近期望的输出力矩,从而在水流干扰及变载荷情况下将机械手抓放操作的轨迹跟踪误差控制在< 0.01 rad[80 ] . 在系统建模过程中,往往只能对已建模项进行补偿,难以抑制未建模的干扰,而复合控制可以通过多种方式分别对已建模项和未建模的干扰进行补偿. 针对自适应滑模控制系统的未建模项,付雯等[81 ] 采用RBF神经网络,并通过动力学模型进行补偿,抑制了系统振动,使得各关节轨迹跟踪误差仅为10−3 rad. 此外,复合控制可以根据不同的参数不确定项选择合适的方式进行逼近或补偿. 高阳等[82 ] 采用分块RBF神经网络逼近动力学模型中的参数不确定项,利用模糊控制对非参数不确定项中的摩擦力进行补偿. 结果显示,与单一的滑模控制、整体RBF神经网络控制、分块RBF神经网络控制相比,该方法使系统平均误差分别降低了85.5%、71.8%、93.1%. ...
基于神经网络和模糊补偿的水下机械臂控制
1
2022
... 6) 复合控制. 单一控制方式各有优缺点,可以加以融合,提供更加稳定、高效的控制策略. 为了弥补PID控制在自适应能力和动态特性上的不足,王立权等[79 ] 设计模糊PID控制方式,通过模糊控制原理对PID的比例、积分、微分参数进行在线修改,调节速度比单一PID控制快了1倍. 神经网络控制也常被加入到PID控制中,例如,小脑模型关节控制器神经网络作为PID控制中的前馈环节,通过学习不断逼近期望的输出力矩,从而在水流干扰及变载荷情况下将机械手抓放操作的轨迹跟踪误差控制在< 0.01 rad[80 ] . 在系统建模过程中,往往只能对已建模项进行补偿,难以抑制未建模的干扰,而复合控制可以通过多种方式分别对已建模项和未建模的干扰进行补偿. 针对自适应滑模控制系统的未建模项,付雯等[81 ] 采用RBF神经网络,并通过动力学模型进行补偿,抑制了系统振动,使得各关节轨迹跟踪误差仅为10−3 rad. 此外,复合控制可以根据不同的参数不确定项选择合适的方式进行逼近或补偿. 高阳等[82 ] 采用分块RBF神经网络逼近动力学模型中的参数不确定项,利用模糊控制对非参数不确定项中的摩擦力进行补偿. 结果显示,与单一的滑模控制、整体RBF神经网络控制、分块RBF神经网络控制相比,该方法使系统平均误差分别降低了85.5%、71.8%、93.1%. ...
1
... 1) 视觉引导. 通过视觉识别、测距并控制机械手移动来完成目标跟踪和自主作业. 在水下环境的低能见度及水动力影响下,手动作业存在耗时长、效率低的问题. Hildebrandt等[83 ] 采用分层控制框架,先通过立体视觉系统进行场景识别与目标的粗略定位,引导机械手移动至预定义的接近位置,随后通过腕部摄像头的视觉伺服控制,根据图像修正末端执行器的位姿,实现固定物体的自主抓取. Sivčev等[84 ] 设计基于位置的视觉伺服控制算法,利用视觉系统实现姿态估计,通过逆运动学模块计算关节运动,实现全自动阀门操作与工具抓取. 针对视觉伺服的定位问题,肖治琥[85 ] 通过引入超声接近传感器提高目标定位精度. 视觉引导下的目标识别和定位面临诸多挑战,如低光照、高噪声、目标遮挡等. 因此,须构建以视觉为主导,结合触觉、声波等模态的多感知传感器系统,确立机械手-目标位姿关系,实现复杂环境下的自主操作. ...
Fully automatic visual servoing control for work-class marine intervention ROVs
1
2018
... 1) 视觉引导. 通过视觉识别、测距并控制机械手移动来完成目标跟踪和自主作业. 在水下环境的低能见度及水动力影响下,手动作业存在耗时长、效率低的问题. Hildebrandt等[83 ] 采用分层控制框架,先通过立体视觉系统进行场景识别与目标的粗略定位,引导机械手移动至预定义的接近位置,随后通过腕部摄像头的视觉伺服控制,根据图像修正末端执行器的位姿,实现固定物体的自主抓取. Sivčev等[84 ] 设计基于位置的视觉伺服控制算法,利用视觉系统实现姿态估计,通过逆运动学模块计算关节运动,实现全自动阀门操作与工具抓取. 针对视觉伺服的定位问题,肖治琥[85 ] 通过引入超声接近传感器提高目标定位精度. 视觉引导下的目标识别和定位面临诸多挑战,如低光照、高噪声、目标遮挡等. 因此,须构建以视觉为主导,结合触觉、声波等模态的多感知传感器系统,确立机械手-目标位姿关系,实现复杂环境下的自主操作. ...
1
... 1) 视觉引导. 通过视觉识别、测距并控制机械手移动来完成目标跟踪和自主作业. 在水下环境的低能见度及水动力影响下,手动作业存在耗时长、效率低的问题. Hildebrandt等[83 ] 采用分层控制框架,先通过立体视觉系统进行场景识别与目标的粗略定位,引导机械手移动至预定义的接近位置,随后通过腕部摄像头的视觉伺服控制,根据图像修正末端执行器的位姿,实现固定物体的自主抓取. Sivčev等[84 ] 设计基于位置的视觉伺服控制算法,利用视觉系统实现姿态估计,通过逆运动学模块计算关节运动,实现全自动阀门操作与工具抓取. 针对视觉伺服的定位问题,肖治琥[85 ] 通过引入超声接近传感器提高目标定位精度. 视觉引导下的目标识别和定位面临诸多挑战,如低光照、高噪声、目标遮挡等. 因此,须构建以视觉为主导,结合触觉、声波等模态的多感知传感器系统,确立机械手-目标位姿关系,实现复杂环境下的自主操作. ...
1
... 1) 视觉引导. 通过视觉识别、测距并控制机械手移动来完成目标跟踪和自主作业. 在水下环境的低能见度及水动力影响下,手动作业存在耗时长、效率低的问题. Hildebrandt等[83 ] 采用分层控制框架,先通过立体视觉系统进行场景识别与目标的粗略定位,引导机械手移动至预定义的接近位置,随后通过腕部摄像头的视觉伺服控制,根据图像修正末端执行器的位姿,实现固定物体的自主抓取. Sivčev等[84 ] 设计基于位置的视觉伺服控制算法,利用视觉系统实现姿态估计,通过逆运动学模块计算关节运动,实现全自动阀门操作与工具抓取. 针对视觉伺服的定位问题,肖治琥[85 ] 通过引入超声接近传感器提高目标定位精度. 视觉引导下的目标识别和定位面临诸多挑战,如低光照、高噪声、目标遮挡等. 因此,须构建以视觉为主导,结合触觉、声波等模态的多感知传感器系统,确立机械手-目标位姿关系,实现复杂环境下的自主操作. ...
1
... 2) 预编程与示教. 对于一些重复性强的固定任务,如更换工具、转动阀门等,可以采取预先编写程序或者示范教学的方式,使机械手按照给定程序或预先学习的流程进行自主作业. Jun等[86 ] 设计一种工作区控制系统,通过预编程的运动模式,可以实现机械手钻孔、取样等自主作业. Carrera等[87 ] 采用示教学习算法,使机械手系统通过人类示范学习阀门操作任务,提取关键特征并生成抗扰动运动策略,在14 kg水流冲击力下仍然保持了50%的成功率. Lane等[88 ] 设计基于示教学习的水下机器人自主作业框架,经过示教学习后,机械手在自主检查、锚链清洁和阀门操作等任务中的成功率超过80%. 预编程方式适合已知环境参数下的任务,在突发情况下对扰动的响应能力有限. 示教方式通过人机协作,将人类示教与算法结合,对于环境的动态变化具有适应性,但是需要大量的训练集作为支撑. 目前,随着虚拟现实(virtual reality, VR)技术快速发展,借助VR设备,通过构建沉浸式交互环境,操作员能够直观、高效地引导机械手学习复杂任务,从而提高自主作业能力. ...
Cognitive system for autonomous underwater intervention
1
2015
... 2) 预编程与示教. 对于一些重复性强的固定任务,如更换工具、转动阀门等,可以采取预先编写程序或者示范教学的方式,使机械手按照给定程序或预先学习的流程进行自主作业. Jun等[86 ] 设计一种工作区控制系统,通过预编程的运动模式,可以实现机械手钻孔、取样等自主作业. Carrera等[87 ] 采用示教学习算法,使机械手系统通过人类示范学习阀门操作任务,提取关键特征并生成抗扰动运动策略,在14 kg水流冲击力下仍然保持了50%的成功率. Lane等[88 ] 设计基于示教学习的水下机器人自主作业框架,经过示教学习后,机械手在自主检查、锚链清洁和阀门操作等任务中的成功率超过80%. 预编程方式适合已知环境参数下的任务,在突发情况下对扰动的响应能力有限. 示教方式通过人机协作,将人类示教与算法结合,对于环境的动态变化具有适应性,但是需要大量的训练集作为支撑. 目前,随着虚拟现实(virtual reality, VR)技术快速发展,借助VR设备,通过构建沉浸式交互环境,操作员能够直观、高效地引导机械手学习复杂任务,从而提高自主作业能力. ...
PANDORA-persistent autonomy through learning, adaptation, observation and replanning
1
2015
... 2) 预编程与示教. 对于一些重复性强的固定任务,如更换工具、转动阀门等,可以采取预先编写程序或者示范教学的方式,使机械手按照给定程序或预先学习的流程进行自主作业. Jun等[86 ] 设计一种工作区控制系统,通过预编程的运动模式,可以实现机械手钻孔、取样等自主作业. Carrera等[87 ] 采用示教学习算法,使机械手系统通过人类示范学习阀门操作任务,提取关键特征并生成抗扰动运动策略,在14 kg水流冲击力下仍然保持了50%的成功率. Lane等[88 ] 设计基于示教学习的水下机器人自主作业框架,经过示教学习后,机械手在自主检查、锚链清洁和阀门操作等任务中的成功率超过80%. 预编程方式适合已知环境参数下的任务,在突发情况下对扰动的响应能力有限. 示教方式通过人机协作,将人类示教与算法结合,对于环境的动态变化具有适应性,但是需要大量的训练集作为支撑. 目前,随着虚拟现实(virtual reality, VR)技术快速发展,借助VR设备,通过构建沉浸式交互环境,操作员能够直观、高效地引导机械手学习复杂任务,从而提高自主作业能力. ...
基于深度强化学习与多参数域随机化的水下机械手自适应抓取研究
1
2022
... 3) 强化学习. 采用强化学习、深度强化学习等人工智能方法,使机械手能够在仿真环境下不断交互学习控制策略,并将所学策略迁移到真实场景,以自主适应复杂环境. 王聪等[89 ] 在深度强化学习框架下,通过对训练环境进行多参数域随机化处理,结合近端策略优化算法,利用轨迹规划模块将强化学习输出的笛卡尔空间指令转化为关节控制量,实现水下机械手的自主抓取. 经过训练的机械手在仿真环境与真实水池中的自主抓取成功率超过70%. 水下环境中的动态干扰容易导致机械手难以从稀疏的奖励信号中学习到有效的作业策略,为此,Huang等[90 ] 提出改进近端策略优化的深度强化学习方法,引入演员-评论家网络架构优化策略更新方向,结合人工势场理论设计密集奖励函数,使训练效率相较于未改进的算法提升了30%. 传统强化学习方法依赖于大量训练集来优化策略,但是由于水下环境的复杂性、昂贵的训练成本及迁移误差等挑战,难以高效训练自主作业能力. 因此,采用数字孪生技术构建与真实水下机械手高度一致的虚拟模型,在仿真环境中进行策略优化成为了重要趋势. 为了规避机械手自主抓取任务中的危险姿态并将所学策略快速迁移到机械手实体上,数字孪生被引入强化学习框架中,并结合径向函数代理模型来预测应力分布. 机械手的数字孪生模型在改进的深度确定性策略梯度算法下学习抓取策略,在真实环境中的抓取成功率超过80%,抓取姿态下所受的最大应力降低了40%[91 ] . ...
基于深度强化学习与多参数域随机化的水下机械手自适应抓取研究
1
2022
... 3) 强化学习. 采用强化学习、深度强化学习等人工智能方法,使机械手能够在仿真环境下不断交互学习控制策略,并将所学策略迁移到真实场景,以自主适应复杂环境. 王聪等[89 ] 在深度强化学习框架下,通过对训练环境进行多参数域随机化处理,结合近端策略优化算法,利用轨迹规划模块将强化学习输出的笛卡尔空间指令转化为关节控制量,实现水下机械手的自主抓取. 经过训练的机械手在仿真环境与真实水池中的自主抓取成功率超过70%. 水下环境中的动态干扰容易导致机械手难以从稀疏的奖励信号中学习到有效的作业策略,为此,Huang等[90 ] 提出改进近端策略优化的深度强化学习方法,引入演员-评论家网络架构优化策略更新方向,结合人工势场理论设计密集奖励函数,使训练效率相较于未改进的算法提升了30%. 传统强化学习方法依赖于大量训练集来优化策略,但是由于水下环境的复杂性、昂贵的训练成本及迁移误差等挑战,难以高效训练自主作业能力. 因此,采用数字孪生技术构建与真实水下机械手高度一致的虚拟模型,在仿真环境中进行策略优化成为了重要趋势. 为了规避机械手自主抓取任务中的危险姿态并将所学策略快速迁移到机械手实体上,数字孪生被引入强化学习框架中,并结合径向函数代理模型来预测应力分布. 机械手的数字孪生模型在改进的深度确定性策略梯度算法下学习抓取策略,在真实环境中的抓取成功率超过80%,抓取姿态下所受的最大应力降低了40%[91 ] . ...
Learning strategies for underwater robot autonomous manipulation control
1
2024
... 3) 强化学习. 采用强化学习、深度强化学习等人工智能方法,使机械手能够在仿真环境下不断交互学习控制策略,并将所学策略迁移到真实场景,以自主适应复杂环境. 王聪等[89 ] 在深度强化学习框架下,通过对训练环境进行多参数域随机化处理,结合近端策略优化算法,利用轨迹规划模块将强化学习输出的笛卡尔空间指令转化为关节控制量,实现水下机械手的自主抓取. 经过训练的机械手在仿真环境与真实水池中的自主抓取成功率超过70%. 水下环境中的动态干扰容易导致机械手难以从稀疏的奖励信号中学习到有效的作业策略,为此,Huang等[90 ] 提出改进近端策略优化的深度强化学习方法,引入演员-评论家网络架构优化策略更新方向,结合人工势场理论设计密集奖励函数,使训练效率相较于未改进的算法提升了30%. 传统强化学习方法依赖于大量训练集来优化策略,但是由于水下环境的复杂性、昂贵的训练成本及迁移误差等挑战,难以高效训练自主作业能力. 因此,采用数字孪生技术构建与真实水下机械手高度一致的虚拟模型,在仿真环境中进行策略优化成为了重要趋势. 为了规避机械手自主抓取任务中的危险姿态并将所学策略快速迁移到机械手实体上,数字孪生被引入强化学习框架中,并结合径向函数代理模型来预测应力分布. 机械手的数字孪生模型在改进的深度确定性策略梯度算法下学习抓取策略,在真实环境中的抓取成功率超过80%,抓取姿态下所受的最大应力降低了40%[91 ] . ...
Digital twin-based stress prediction for autonomous grasping of underwater robots with reinforcement learning
1
2025
... 3) 强化学习. 采用强化学习、深度强化学习等人工智能方法,使机械手能够在仿真环境下不断交互学习控制策略,并将所学策略迁移到真实场景,以自主适应复杂环境. 王聪等[89 ] 在深度强化学习框架下,通过对训练环境进行多参数域随机化处理,结合近端策略优化算法,利用轨迹规划模块将强化学习输出的笛卡尔空间指令转化为关节控制量,实现水下机械手的自主抓取. 经过训练的机械手在仿真环境与真实水池中的自主抓取成功率超过70%. 水下环境中的动态干扰容易导致机械手难以从稀疏的奖励信号中学习到有效的作业策略,为此,Huang等[90 ] 提出改进近端策略优化的深度强化学习方法,引入演员-评论家网络架构优化策略更新方向,结合人工势场理论设计密集奖励函数,使训练效率相较于未改进的算法提升了30%. 传统强化学习方法依赖于大量训练集来优化策略,但是由于水下环境的复杂性、昂贵的训练成本及迁移误差等挑战,难以高效训练自主作业能力. 因此,采用数字孪生技术构建与真实水下机械手高度一致的虚拟模型,在仿真环境中进行策略优化成为了重要趋势. 为了规避机械手自主抓取任务中的危险姿态并将所学策略快速迁移到机械手实体上,数字孪生被引入强化学习框架中,并结合径向函数代理模型来预测应力分布. 机械手的数字孪生模型在改进的深度确定性策略梯度算法下学习抓取策略,在真实环境中的抓取成功率超过80%,抓取姿态下所受的最大应力降低了40%[91 ] . ...
The AMADEUS dextrous subsea hand: design, modeling, and sensor processing
2
1999
... Parameters of rigid end-effectors
Tab.6 刚性末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 传动方式 质量(空气)/kg 抓取力/N AMADEUS[92 ] 爱丁堡赫瑞瓦特大学 3指 — 液压 — 3.5 15.4 多关节刚性夹持器[93 ] 东海大学 2指 — 电动 齿轮+腱绳 — — 十二面体灵巧手[94 ] 哈佛大学 5指 1 100 电动 连杆 — — SeeGrip夹持器[95 ] 德国人工智能研究中心 3指 6 000 液压+电动 连杆 9.5 100 MARIS灵巧夹持器[96 ] 博洛尼亚大学 3指 50 电动 腱绳 4.5 150 HEU Hand I[97 ] 哈尔滨工程大学 3指 — 电动 腱绳 — — HEU Hand II[98 ] 哈尔滨工程大学 3指 — 电动 齿轮 3.1 8 GUH14[99 ] 卡拉布里亚大学/赫罗纳大学 3指 60 电动 齿轮+腱绳 0.3 — Ocean One hand[100 ] 斯坦福大学 3指 50 电动 腱绳 — 35 Three-Fingered Gripper[101 ] 博洛尼亚大学 3指 100 电动 蜗轮蜗杆 4.5 50 UNIBO[102 ] 博洛尼亚大学 3指 25 电动 腱绳 4.5 150
借助特定结构的可变形性,是实现末端执行器灵巧、柔顺特性的主要方式,其本质是增加了执行器的自由度. Lane等[92 ] 利用金属波纹管设计灵巧的三指夹持器AMADEUS,其手指由3个平行排列的金属波纹管组成,借助波纹管中的压力差可以实现手指±20°的弯曲. 链条结构由一系列可以相互转动的链节组成,类似于人手结构. 东海大学团队开发多关节的刚性夹持器,如图5 中(b)所示,手指由4节链条组成,通过齿轮机构调节手指角度,可以包络抓取不同形状的物体. 此外,可以借助张紧弹簧机构调节手指刚度,以应对水流干扰[93 ] . 另一种十二面体灵巧手,如图5 (c)所示,由于其独特的折叠结构设计,该灵巧手可以以0.2~0.5 m的幅度开合,能够承受1 100 m深海的高压,抓取水母等柔软的海洋生物[94 ] . 当面对非结构化环境时,对外部接触力、作业对象状态及动态变化的感知能力也是增强灵巧手的操作能力的前提条件. SeeGrip项目的灵活夹持器将触觉传感器嵌入到手指中,实现了实时反馈与精准控制[95 ] . MARIS项目(见图5 (g))将相机巧妙地放置在夹持器手掌中,使夹持器具备视觉感知功能[96 ] . ...
... 借助特定结构的可变形性,是实现末端执行器灵巧、柔顺特性的主要方式,其本质是增加了执行器的自由度. Lane等[92 ] 利用金属波纹管设计灵巧的三指夹持器AMADEUS,其手指由3个平行排列的金属波纹管组成,借助波纹管中的压力差可以实现手指±20°的弯曲. 链条结构由一系列可以相互转动的链节组成,类似于人手结构. 东海大学团队开发多关节的刚性夹持器,如图5 中(b)所示,手指由4节链条组成,通过齿轮机构调节手指角度,可以包络抓取不同形状的物体. 此外,可以借助张紧弹簧机构调节手指刚度,以应对水流干扰[93 ] . 另一种十二面体灵巧手,如图5 (c)所示,由于其独特的折叠结构设计,该灵巧手可以以0.2~0.5 m的幅度开合,能够承受1 100 m深海的高压,抓取水母等柔软的海洋生物[94 ] . 当面对非结构化环境时,对外部接触力、作业对象状态及动态变化的感知能力也是增强灵巧手的操作能力的前提条件. SeeGrip项目的灵活夹持器将触觉传感器嵌入到手指中,实现了实时反馈与精准控制[95 ] . MARIS项目(见图5 (g))将相机巧妙地放置在夹持器手掌中,使夹持器具备视觉感知功能[96 ] . ...
2
... Parameters of rigid end-effectors
Tab.6 刚性末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 传动方式 质量(空气)/kg 抓取力/N AMADEUS[92 ] 爱丁堡赫瑞瓦特大学 3指 — 液压 — 3.5 15.4 多关节刚性夹持器[93 ] 东海大学 2指 — 电动 齿轮+腱绳 — — 十二面体灵巧手[94 ] 哈佛大学 5指 1 100 电动 连杆 — — SeeGrip夹持器[95 ] 德国人工智能研究中心 3指 6 000 液压+电动 连杆 9.5 100 MARIS灵巧夹持器[96 ] 博洛尼亚大学 3指 50 电动 腱绳 4.5 150 HEU Hand I[97 ] 哈尔滨工程大学 3指 — 电动 腱绳 — — HEU Hand II[98 ] 哈尔滨工程大学 3指 — 电动 齿轮 3.1 8 GUH14[99 ] 卡拉布里亚大学/赫罗纳大学 3指 60 电动 齿轮+腱绳 0.3 — Ocean One hand[100 ] 斯坦福大学 3指 50 电动 腱绳 — 35 Three-Fingered Gripper[101 ] 博洛尼亚大学 3指 100 电动 蜗轮蜗杆 4.5 50 UNIBO[102 ] 博洛尼亚大学 3指 25 电动 腱绳 4.5 150
借助特定结构的可变形性,是实现末端执行器灵巧、柔顺特性的主要方式,其本质是增加了执行器的自由度. Lane等[92 ] 利用金属波纹管设计灵巧的三指夹持器AMADEUS,其手指由3个平行排列的金属波纹管组成,借助波纹管中的压力差可以实现手指±20°的弯曲. 链条结构由一系列可以相互转动的链节组成,类似于人手结构. 东海大学团队开发多关节的刚性夹持器,如图5 中(b)所示,手指由4节链条组成,通过齿轮机构调节手指角度,可以包络抓取不同形状的物体. 此外,可以借助张紧弹簧机构调节手指刚度,以应对水流干扰[93 ] . 另一种十二面体灵巧手,如图5 (c)所示,由于其独特的折叠结构设计,该灵巧手可以以0.2~0.5 m的幅度开合,能够承受1 100 m深海的高压,抓取水母等柔软的海洋生物[94 ] . 当面对非结构化环境时,对外部接触力、作业对象状态及动态变化的感知能力也是增强灵巧手的操作能力的前提条件. SeeGrip项目的灵活夹持器将触觉传感器嵌入到手指中,实现了实时反馈与精准控制[95 ] . MARIS项目(见图5 (g))将相机巧妙地放置在夹持器手掌中,使夹持器具备视觉感知功能[96 ] . ...
... 借助特定结构的可变形性,是实现末端执行器灵巧、柔顺特性的主要方式,其本质是增加了执行器的自由度. Lane等[92 ] 利用金属波纹管设计灵巧的三指夹持器AMADEUS,其手指由3个平行排列的金属波纹管组成,借助波纹管中的压力差可以实现手指±20°的弯曲. 链条结构由一系列可以相互转动的链节组成,类似于人手结构. 东海大学团队开发多关节的刚性夹持器,如图5 中(b)所示,手指由4节链条组成,通过齿轮机构调节手指角度,可以包络抓取不同形状的物体. 此外,可以借助张紧弹簧机构调节手指刚度,以应对水流干扰[93 ] . 另一种十二面体灵巧手,如图5 (c)所示,由于其独特的折叠结构设计,该灵巧手可以以0.2~0.5 m的幅度开合,能够承受1 100 m深海的高压,抓取水母等柔软的海洋生物[94 ] . 当面对非结构化环境时,对外部接触力、作业对象状态及动态变化的感知能力也是增强灵巧手的操作能力的前提条件. SeeGrip项目的灵活夹持器将触觉传感器嵌入到手指中,实现了实时反馈与精准控制[95 ] . MARIS项目(见图5 (g))将相机巧妙地放置在夹持器手掌中,使夹持器具备视觉感知功能[96 ] . ...
Rotary-actuated folding polyhedrons for midwater investigation of delicate marine organisms
2
2018
... Parameters of rigid end-effectors
Tab.6 刚性末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 传动方式 质量(空气)/kg 抓取力/N AMADEUS[92 ] 爱丁堡赫瑞瓦特大学 3指 — 液压 — 3.5 15.4 多关节刚性夹持器[93 ] 东海大学 2指 — 电动 齿轮+腱绳 — — 十二面体灵巧手[94 ] 哈佛大学 5指 1 100 电动 连杆 — — SeeGrip夹持器[95 ] 德国人工智能研究中心 3指 6 000 液压+电动 连杆 9.5 100 MARIS灵巧夹持器[96 ] 博洛尼亚大学 3指 50 电动 腱绳 4.5 150 HEU Hand I[97 ] 哈尔滨工程大学 3指 — 电动 腱绳 — — HEU Hand II[98 ] 哈尔滨工程大学 3指 — 电动 齿轮 3.1 8 GUH14[99 ] 卡拉布里亚大学/赫罗纳大学 3指 60 电动 齿轮+腱绳 0.3 — Ocean One hand[100 ] 斯坦福大学 3指 50 电动 腱绳 — 35 Three-Fingered Gripper[101 ] 博洛尼亚大学 3指 100 电动 蜗轮蜗杆 4.5 50 UNIBO[102 ] 博洛尼亚大学 3指 25 电动 腱绳 4.5 150
借助特定结构的可变形性,是实现末端执行器灵巧、柔顺特性的主要方式,其本质是增加了执行器的自由度. Lane等[92 ] 利用金属波纹管设计灵巧的三指夹持器AMADEUS,其手指由3个平行排列的金属波纹管组成,借助波纹管中的压力差可以实现手指±20°的弯曲. 链条结构由一系列可以相互转动的链节组成,类似于人手结构. 东海大学团队开发多关节的刚性夹持器,如图5 中(b)所示,手指由4节链条组成,通过齿轮机构调节手指角度,可以包络抓取不同形状的物体. 此外,可以借助张紧弹簧机构调节手指刚度,以应对水流干扰[93 ] . 另一种十二面体灵巧手,如图5 (c)所示,由于其独特的折叠结构设计,该灵巧手可以以0.2~0.5 m的幅度开合,能够承受1 100 m深海的高压,抓取水母等柔软的海洋生物[94 ] . 当面对非结构化环境时,对外部接触力、作业对象状态及动态变化的感知能力也是增强灵巧手的操作能力的前提条件. SeeGrip项目的灵活夹持器将触觉传感器嵌入到手指中,实现了实时反馈与精准控制[95 ] . MARIS项目(见图5 (g))将相机巧妙地放置在夹持器手掌中,使夹持器具备视觉感知功能[96 ] . ...
... 借助特定结构的可变形性,是实现末端执行器灵巧、柔顺特性的主要方式,其本质是增加了执行器的自由度. Lane等[92 ] 利用金属波纹管设计灵巧的三指夹持器AMADEUS,其手指由3个平行排列的金属波纹管组成,借助波纹管中的压力差可以实现手指±20°的弯曲. 链条结构由一系列可以相互转动的链节组成,类似于人手结构. 东海大学团队开发多关节的刚性夹持器,如图5 中(b)所示,手指由4节链条组成,通过齿轮机构调节手指角度,可以包络抓取不同形状的物体. 此外,可以借助张紧弹簧机构调节手指刚度,以应对水流干扰[93 ] . 另一种十二面体灵巧手,如图5 (c)所示,由于其独特的折叠结构设计,该灵巧手可以以0.2~0.5 m的幅度开合,能够承受1 100 m深海的高压,抓取水母等柔软的海洋生物[94 ] . 当面对非结构化环境时,对外部接触力、作业对象状态及动态变化的感知能力也是增强灵巧手的操作能力的前提条件. SeeGrip项目的灵活夹持器将触觉传感器嵌入到手指中,实现了实时反馈与精准控制[95 ] . MARIS项目(见图5 (g))将相机巧妙地放置在夹持器手掌中,使夹持器具备视觉感知功能[96 ] . ...
Towards a fine-manipulation system with tactile feedback for deep-sea environments
2
2015
... Parameters of rigid end-effectors
Tab.6 刚性末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 传动方式 质量(空气)/kg 抓取力/N AMADEUS[92 ] 爱丁堡赫瑞瓦特大学 3指 — 液压 — 3.5 15.4 多关节刚性夹持器[93 ] 东海大学 2指 — 电动 齿轮+腱绳 — — 十二面体灵巧手[94 ] 哈佛大学 5指 1 100 电动 连杆 — — SeeGrip夹持器[95 ] 德国人工智能研究中心 3指 6 000 液压+电动 连杆 9.5 100 MARIS灵巧夹持器[96 ] 博洛尼亚大学 3指 50 电动 腱绳 4.5 150 HEU Hand I[97 ] 哈尔滨工程大学 3指 — 电动 腱绳 — — HEU Hand II[98 ] 哈尔滨工程大学 3指 — 电动 齿轮 3.1 8 GUH14[99 ] 卡拉布里亚大学/赫罗纳大学 3指 60 电动 齿轮+腱绳 0.3 — Ocean One hand[100 ] 斯坦福大学 3指 50 电动 腱绳 — 35 Three-Fingered Gripper[101 ] 博洛尼亚大学 3指 100 电动 蜗轮蜗杆 4.5 50 UNIBO[102 ] 博洛尼亚大学 3指 25 电动 腱绳 4.5 150
借助特定结构的可变形性,是实现末端执行器灵巧、柔顺特性的主要方式,其本质是增加了执行器的自由度. Lane等[92 ] 利用金属波纹管设计灵巧的三指夹持器AMADEUS,其手指由3个平行排列的金属波纹管组成,借助波纹管中的压力差可以实现手指±20°的弯曲. 链条结构由一系列可以相互转动的链节组成,类似于人手结构. 东海大学团队开发多关节的刚性夹持器,如图5 中(b)所示,手指由4节链条组成,通过齿轮机构调节手指角度,可以包络抓取不同形状的物体. 此外,可以借助张紧弹簧机构调节手指刚度,以应对水流干扰[93 ] . 另一种十二面体灵巧手,如图5 (c)所示,由于其独特的折叠结构设计,该灵巧手可以以0.2~0.5 m的幅度开合,能够承受1 100 m深海的高压,抓取水母等柔软的海洋生物[94 ] . 当面对非结构化环境时,对外部接触力、作业对象状态及动态变化的感知能力也是增强灵巧手的操作能力的前提条件. SeeGrip项目的灵活夹持器将触觉传感器嵌入到手指中,实现了实时反馈与精准控制[95 ] . MARIS项目(见图5 (g))将相机巧妙地放置在夹持器手掌中,使夹持器具备视觉感知功能[96 ] . ...
... 借助特定结构的可变形性,是实现末端执行器灵巧、柔顺特性的主要方式,其本质是增加了执行器的自由度. Lane等[92 ] 利用金属波纹管设计灵巧的三指夹持器AMADEUS,其手指由3个平行排列的金属波纹管组成,借助波纹管中的压力差可以实现手指±20°的弯曲. 链条结构由一系列可以相互转动的链节组成,类似于人手结构. 东海大学团队开发多关节的刚性夹持器,如图5 中(b)所示,手指由4节链条组成,通过齿轮机构调节手指角度,可以包络抓取不同形状的物体. 此外,可以借助张紧弹簧机构调节手指刚度,以应对水流干扰[93 ] . 另一种十二面体灵巧手,如图5 (c)所示,由于其独特的折叠结构设计,该灵巧手可以以0.2~0.5 m的幅度开合,能够承受1 100 m深海的高压,抓取水母等柔软的海洋生物[94 ] . 当面对非结构化环境时,对外部接触力、作业对象状态及动态变化的感知能力也是增强灵巧手的操作能力的前提条件. SeeGrip项目的灵活夹持器将触觉传感器嵌入到手指中,实现了实时反馈与精准控制[95 ] . MARIS项目(见图5 (g))将相机巧妙地放置在夹持器手掌中,使夹持器具备视觉感知功能[96 ] . ...
Autonomous underwater intervention: experimental results of the MARIS project
2
2018
... Parameters of rigid end-effectors
Tab.6 刚性末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 传动方式 质量(空气)/kg 抓取力/N AMADEUS[92 ] 爱丁堡赫瑞瓦特大学 3指 — 液压 — 3.5 15.4 多关节刚性夹持器[93 ] 东海大学 2指 — 电动 齿轮+腱绳 — — 十二面体灵巧手[94 ] 哈佛大学 5指 1 100 电动 连杆 — — SeeGrip夹持器[95 ] 德国人工智能研究中心 3指 6 000 液压+电动 连杆 9.5 100 MARIS灵巧夹持器[96 ] 博洛尼亚大学 3指 50 电动 腱绳 4.5 150 HEU Hand I[97 ] 哈尔滨工程大学 3指 — 电动 腱绳 — — HEU Hand II[98 ] 哈尔滨工程大学 3指 — 电动 齿轮 3.1 8 GUH14[99 ] 卡拉布里亚大学/赫罗纳大学 3指 60 电动 齿轮+腱绳 0.3 — Ocean One hand[100 ] 斯坦福大学 3指 50 电动 腱绳 — 35 Three-Fingered Gripper[101 ] 博洛尼亚大学 3指 100 电动 蜗轮蜗杆 4.5 50 UNIBO[102 ] 博洛尼亚大学 3指 25 电动 腱绳 4.5 150
借助特定结构的可变形性,是实现末端执行器灵巧、柔顺特性的主要方式,其本质是增加了执行器的自由度. Lane等[92 ] 利用金属波纹管设计灵巧的三指夹持器AMADEUS,其手指由3个平行排列的金属波纹管组成,借助波纹管中的压力差可以实现手指±20°的弯曲. 链条结构由一系列可以相互转动的链节组成,类似于人手结构. 东海大学团队开发多关节的刚性夹持器,如图5 中(b)所示,手指由4节链条组成,通过齿轮机构调节手指角度,可以包络抓取不同形状的物体. 此外,可以借助张紧弹簧机构调节手指刚度,以应对水流干扰[93 ] . 另一种十二面体灵巧手,如图5 (c)所示,由于其独特的折叠结构设计,该灵巧手可以以0.2~0.5 m的幅度开合,能够承受1 100 m深海的高压,抓取水母等柔软的海洋生物[94 ] . 当面对非结构化环境时,对外部接触力、作业对象状态及动态变化的感知能力也是增强灵巧手的操作能力的前提条件. SeeGrip项目的灵活夹持器将触觉传感器嵌入到手指中,实现了实时反馈与精准控制[95 ] . MARIS项目(见图5 (g))将相机巧妙地放置在夹持器手掌中,使夹持器具备视觉感知功能[96 ] . ...
... 借助特定结构的可变形性,是实现末端执行器灵巧、柔顺特性的主要方式,其本质是增加了执行器的自由度. Lane等[92 ] 利用金属波纹管设计灵巧的三指夹持器AMADEUS,其手指由3个平行排列的金属波纹管组成,借助波纹管中的压力差可以实现手指±20°的弯曲. 链条结构由一系列可以相互转动的链节组成,类似于人手结构. 东海大学团队开发多关节的刚性夹持器,如图5 中(b)所示,手指由4节链条组成,通过齿轮机构调节手指角度,可以包络抓取不同形状的物体. 此外,可以借助张紧弹簧机构调节手指刚度,以应对水流干扰[93 ] . 另一种十二面体灵巧手,如图5 (c)所示,由于其独特的折叠结构设计,该灵巧手可以以0.2~0.5 m的幅度开合,能够承受1 100 m深海的高压,抓取水母等柔软的海洋生物[94 ] . 当面对非结构化环境时,对外部接触力、作业对象状态及动态变化的感知能力也是增强灵巧手的操作能力的前提条件. SeeGrip项目的灵活夹持器将触觉传感器嵌入到手指中,实现了实时反馈与精准控制[95 ] . MARIS项目(见图5 (g))将相机巧妙地放置在夹持器手掌中,使夹持器具备视觉感知功能[96 ] . ...
2
... Parameters of rigid end-effectors
Tab.6 刚性末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 传动方式 质量(空气)/kg 抓取力/N AMADEUS[92 ] 爱丁堡赫瑞瓦特大学 3指 — 液压 — 3.5 15.4 多关节刚性夹持器[93 ] 东海大学 2指 — 电动 齿轮+腱绳 — — 十二面体灵巧手[94 ] 哈佛大学 5指 1 100 电动 连杆 — — SeeGrip夹持器[95 ] 德国人工智能研究中心 3指 6 000 液压+电动 连杆 9.5 100 MARIS灵巧夹持器[96 ] 博洛尼亚大学 3指 50 电动 腱绳 4.5 150 HEU Hand I[97 ] 哈尔滨工程大学 3指 — 电动 腱绳 — — HEU Hand II[98 ] 哈尔滨工程大学 3指 — 电动 齿轮 3.1 8 GUH14[99 ] 卡拉布里亚大学/赫罗纳大学 3指 60 电动 齿轮+腱绳 0.3 — Ocean One hand[100 ] 斯坦福大学 3指 50 电动 腱绳 — 35 Three-Fingered Gripper[101 ] 博洛尼亚大学 3指 100 电动 蜗轮蜗杆 4.5 50 UNIBO[102 ] 博洛尼亚大学 3指 25 电动 腱绳 4.5 150
借助特定结构的可变形性,是实现末端执行器灵巧、柔顺特性的主要方式,其本质是增加了执行器的自由度. Lane等[92 ] 利用金属波纹管设计灵巧的三指夹持器AMADEUS,其手指由3个平行排列的金属波纹管组成,借助波纹管中的压力差可以实现手指±20°的弯曲. 链条结构由一系列可以相互转动的链节组成,类似于人手结构. 东海大学团队开发多关节的刚性夹持器,如图5 中(b)所示,手指由4节链条组成,通过齿轮机构调节手指角度,可以包络抓取不同形状的物体. 此外,可以借助张紧弹簧机构调节手指刚度,以应对水流干扰[93 ] . 另一种十二面体灵巧手,如图5 (c)所示,由于其独特的折叠结构设计,该灵巧手可以以0.2~0.5 m的幅度开合,能够承受1 100 m深海的高压,抓取水母等柔软的海洋生物[94 ] . 当面对非结构化环境时,对外部接触力、作业对象状态及动态变化的感知能力也是增强灵巧手的操作能力的前提条件. SeeGrip项目的灵活夹持器将触觉传感器嵌入到手指中,实现了实时反馈与精准控制[95 ] . MARIS项目(见图5 (g))将相机巧妙地放置在夹持器手掌中,使夹持器具备视觉感知功能[96 ] . ...
... 在传动方式上,腱绳传动作为兼顾灵巧性与柔顺性的代表性方案,使执行器能够更自然地模仿人手的动作. 基于腱绳传动的HEU Hand I(图5 (a))可以将驱动及电气系统置于灵巧手的外部(如机械臂),使得手指和手掌内部的空间得以释放,提升了手的灵巧性[97 ] . 然而,腱绳传动的设计存在控制精度低、运动干涉等问题. 在HEU Hand I基础上,Meng等[98 ] 用齿轮传动取代腱绳传动,并结合关节的位置传感器来提升关节角度控制的精度和稳定性. 另一种水下夹持器GUH14,如图5 (h)所示,融合了齿轮与腱绳传动的特点,通过齿轮驱动近端指骨,通过腱绳驱动远端指骨. 这种组合驱动方式充分发挥了齿轮的高精度优势和绳索的柔顺性,适应水下复杂环境中对夹持器稳定性与灵活性的要求[99 ] . 为了降低机械结构复杂性,Stuart等[100 ] 用弹性件替代销轴连接件,在灵巧手Ocean One hand(见图5 (d))中,通过在腱绳传动的手指关节间嵌入聚氨酯弯曲件,并结合预紧弹簧,使手指具有相对较低的弯曲刚度;通过调节手指刚度,可以满足不同场景下的抓取需求. ...
2
... Parameters of rigid end-effectors
Tab.6 刚性末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 传动方式 质量(空气)/kg 抓取力/N AMADEUS[92 ] 爱丁堡赫瑞瓦特大学 3指 — 液压 — 3.5 15.4 多关节刚性夹持器[93 ] 东海大学 2指 — 电动 齿轮+腱绳 — — 十二面体灵巧手[94 ] 哈佛大学 5指 1 100 电动 连杆 — — SeeGrip夹持器[95 ] 德国人工智能研究中心 3指 6 000 液压+电动 连杆 9.5 100 MARIS灵巧夹持器[96 ] 博洛尼亚大学 3指 50 电动 腱绳 4.5 150 HEU Hand I[97 ] 哈尔滨工程大学 3指 — 电动 腱绳 — — HEU Hand II[98 ] 哈尔滨工程大学 3指 — 电动 齿轮 3.1 8 GUH14[99 ] 卡拉布里亚大学/赫罗纳大学 3指 60 电动 齿轮+腱绳 0.3 — Ocean One hand[100 ] 斯坦福大学 3指 50 电动 腱绳 — 35 Three-Fingered Gripper[101 ] 博洛尼亚大学 3指 100 电动 蜗轮蜗杆 4.5 50 UNIBO[102 ] 博洛尼亚大学 3指 25 电动 腱绳 4.5 150
借助特定结构的可变形性,是实现末端执行器灵巧、柔顺特性的主要方式,其本质是增加了执行器的自由度. Lane等[92 ] 利用金属波纹管设计灵巧的三指夹持器AMADEUS,其手指由3个平行排列的金属波纹管组成,借助波纹管中的压力差可以实现手指±20°的弯曲. 链条结构由一系列可以相互转动的链节组成,类似于人手结构. 东海大学团队开发多关节的刚性夹持器,如图5 中(b)所示,手指由4节链条组成,通过齿轮机构调节手指角度,可以包络抓取不同形状的物体. 此外,可以借助张紧弹簧机构调节手指刚度,以应对水流干扰[93 ] . 另一种十二面体灵巧手,如图5 (c)所示,由于其独特的折叠结构设计,该灵巧手可以以0.2~0.5 m的幅度开合,能够承受1 100 m深海的高压,抓取水母等柔软的海洋生物[94 ] . 当面对非结构化环境时,对外部接触力、作业对象状态及动态变化的感知能力也是增强灵巧手的操作能力的前提条件. SeeGrip项目的灵活夹持器将触觉传感器嵌入到手指中,实现了实时反馈与精准控制[95 ] . MARIS项目(见图5 (g))将相机巧妙地放置在夹持器手掌中,使夹持器具备视觉感知功能[96 ] . ...
... 在传动方式上,腱绳传动作为兼顾灵巧性与柔顺性的代表性方案,使执行器能够更自然地模仿人手的动作. 基于腱绳传动的HEU Hand I(图5 (a))可以将驱动及电气系统置于灵巧手的外部(如机械臂),使得手指和手掌内部的空间得以释放,提升了手的灵巧性[97 ] . 然而,腱绳传动的设计存在控制精度低、运动干涉等问题. 在HEU Hand I基础上,Meng等[98 ] 用齿轮传动取代腱绳传动,并结合关节的位置传感器来提升关节角度控制的精度和稳定性. 另一种水下夹持器GUH14,如图5 (h)所示,融合了齿轮与腱绳传动的特点,通过齿轮驱动近端指骨,通过腱绳驱动远端指骨. 这种组合驱动方式充分发挥了齿轮的高精度优势和绳索的柔顺性,适应水下复杂环境中对夹持器稳定性与灵活性的要求[99 ] . 为了降低机械结构复杂性,Stuart等[100 ] 用弹性件替代销轴连接件,在灵巧手Ocean One hand(见图5 (d))中,通过在腱绳传动的手指关节间嵌入聚氨酯弯曲件,并结合预紧弹簧,使手指具有相对较低的弯曲刚度;通过调节手指刚度,可以满足不同场景下的抓取需求. ...
Design and construction of a robot hand prototype for underwater applications
2
2015
... Parameters of rigid end-effectors
Tab.6 刚性末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 传动方式 质量(空气)/kg 抓取力/N AMADEUS[92 ] 爱丁堡赫瑞瓦特大学 3指 — 液压 — 3.5 15.4 多关节刚性夹持器[93 ] 东海大学 2指 — 电动 齿轮+腱绳 — — 十二面体灵巧手[94 ] 哈佛大学 5指 1 100 电动 连杆 — — SeeGrip夹持器[95 ] 德国人工智能研究中心 3指 6 000 液压+电动 连杆 9.5 100 MARIS灵巧夹持器[96 ] 博洛尼亚大学 3指 50 电动 腱绳 4.5 150 HEU Hand I[97 ] 哈尔滨工程大学 3指 — 电动 腱绳 — — HEU Hand II[98 ] 哈尔滨工程大学 3指 — 电动 齿轮 3.1 8 GUH14[99 ] 卡拉布里亚大学/赫罗纳大学 3指 60 电动 齿轮+腱绳 0.3 — Ocean One hand[100 ] 斯坦福大学 3指 50 电动 腱绳 — 35 Three-Fingered Gripper[101 ] 博洛尼亚大学 3指 100 电动 蜗轮蜗杆 4.5 50 UNIBO[102 ] 博洛尼亚大学 3指 25 电动 腱绳 4.5 150
借助特定结构的可变形性,是实现末端执行器灵巧、柔顺特性的主要方式,其本质是增加了执行器的自由度. Lane等[92 ] 利用金属波纹管设计灵巧的三指夹持器AMADEUS,其手指由3个平行排列的金属波纹管组成,借助波纹管中的压力差可以实现手指±20°的弯曲. 链条结构由一系列可以相互转动的链节组成,类似于人手结构. 东海大学团队开发多关节的刚性夹持器,如图5 中(b)所示,手指由4节链条组成,通过齿轮机构调节手指角度,可以包络抓取不同形状的物体. 此外,可以借助张紧弹簧机构调节手指刚度,以应对水流干扰[93 ] . 另一种十二面体灵巧手,如图5 (c)所示,由于其独特的折叠结构设计,该灵巧手可以以0.2~0.5 m的幅度开合,能够承受1 100 m深海的高压,抓取水母等柔软的海洋生物[94 ] . 当面对非结构化环境时,对外部接触力、作业对象状态及动态变化的感知能力也是增强灵巧手的操作能力的前提条件. SeeGrip项目的灵活夹持器将触觉传感器嵌入到手指中,实现了实时反馈与精准控制[95 ] . MARIS项目(见图5 (g))将相机巧妙地放置在夹持器手掌中,使夹持器具备视觉感知功能[96 ] . ...
... 在传动方式上,腱绳传动作为兼顾灵巧性与柔顺性的代表性方案,使执行器能够更自然地模仿人手的动作. 基于腱绳传动的HEU Hand I(图5 (a))可以将驱动及电气系统置于灵巧手的外部(如机械臂),使得手指和手掌内部的空间得以释放,提升了手的灵巧性[97 ] . 然而,腱绳传动的设计存在控制精度低、运动干涉等问题. 在HEU Hand I基础上,Meng等[98 ] 用齿轮传动取代腱绳传动,并结合关节的位置传感器来提升关节角度控制的精度和稳定性. 另一种水下夹持器GUH14,如图5 (h)所示,融合了齿轮与腱绳传动的特点,通过齿轮驱动近端指骨,通过腱绳驱动远端指骨. 这种组合驱动方式充分发挥了齿轮的高精度优势和绳索的柔顺性,适应水下复杂环境中对夹持器稳定性与灵活性的要求[99 ] . 为了降低机械结构复杂性,Stuart等[100 ] 用弹性件替代销轴连接件,在灵巧手Ocean One hand(见图5 (d))中,通过在腱绳传动的手指关节间嵌入聚氨酯弯曲件,并结合预紧弹簧,使手指具有相对较低的弯曲刚度;通过调节手指刚度,可以满足不同场景下的抓取需求. ...
The Ocean One hands: an adaptive design for robust marine manipulation
2
2017
... Parameters of rigid end-effectors
Tab.6 刚性末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 传动方式 质量(空气)/kg 抓取力/N AMADEUS[92 ] 爱丁堡赫瑞瓦特大学 3指 — 液压 — 3.5 15.4 多关节刚性夹持器[93 ] 东海大学 2指 — 电动 齿轮+腱绳 — — 十二面体灵巧手[94 ] 哈佛大学 5指 1 100 电动 连杆 — — SeeGrip夹持器[95 ] 德国人工智能研究中心 3指 6 000 液压+电动 连杆 9.5 100 MARIS灵巧夹持器[96 ] 博洛尼亚大学 3指 50 电动 腱绳 4.5 150 HEU Hand I[97 ] 哈尔滨工程大学 3指 — 电动 腱绳 — — HEU Hand II[98 ] 哈尔滨工程大学 3指 — 电动 齿轮 3.1 8 GUH14[99 ] 卡拉布里亚大学/赫罗纳大学 3指 60 电动 齿轮+腱绳 0.3 — Ocean One hand[100 ] 斯坦福大学 3指 50 电动 腱绳 — 35 Three-Fingered Gripper[101 ] 博洛尼亚大学 3指 100 电动 蜗轮蜗杆 4.5 50 UNIBO[102 ] 博洛尼亚大学 3指 25 电动 腱绳 4.5 150
借助特定结构的可变形性,是实现末端执行器灵巧、柔顺特性的主要方式,其本质是增加了执行器的自由度. Lane等[92 ] 利用金属波纹管设计灵巧的三指夹持器AMADEUS,其手指由3个平行排列的金属波纹管组成,借助波纹管中的压力差可以实现手指±20°的弯曲. 链条结构由一系列可以相互转动的链节组成,类似于人手结构. 东海大学团队开发多关节的刚性夹持器,如图5 中(b)所示,手指由4节链条组成,通过齿轮机构调节手指角度,可以包络抓取不同形状的物体. 此外,可以借助张紧弹簧机构调节手指刚度,以应对水流干扰[93 ] . 另一种十二面体灵巧手,如图5 (c)所示,由于其独特的折叠结构设计,该灵巧手可以以0.2~0.5 m的幅度开合,能够承受1 100 m深海的高压,抓取水母等柔软的海洋生物[94 ] . 当面对非结构化环境时,对外部接触力、作业对象状态及动态变化的感知能力也是增强灵巧手的操作能力的前提条件. SeeGrip项目的灵活夹持器将触觉传感器嵌入到手指中,实现了实时反馈与精准控制[95 ] . MARIS项目(见图5 (g))将相机巧妙地放置在夹持器手掌中,使夹持器具备视觉感知功能[96 ] . ...
... 在传动方式上,腱绳传动作为兼顾灵巧性与柔顺性的代表性方案,使执行器能够更自然地模仿人手的动作. 基于腱绳传动的HEU Hand I(图5 (a))可以将驱动及电气系统置于灵巧手的外部(如机械臂),使得手指和手掌内部的空间得以释放,提升了手的灵巧性[97 ] . 然而,腱绳传动的设计存在控制精度低、运动干涉等问题. 在HEU Hand I基础上,Meng等[98 ] 用齿轮传动取代腱绳传动,并结合关节的位置传感器来提升关节角度控制的精度和稳定性. 另一种水下夹持器GUH14,如图5 (h)所示,融合了齿轮与腱绳传动的特点,通过齿轮驱动近端指骨,通过腱绳驱动远端指骨. 这种组合驱动方式充分发挥了齿轮的高精度优势和绳索的柔顺性,适应水下复杂环境中对夹持器稳定性与灵活性的要求[99 ] . 为了降低机械结构复杂性,Stuart等[100 ] 用弹性件替代销轴连接件,在灵巧手Ocean One hand(见图5 (d))中,通过在腱绳传动的手指关节间嵌入聚氨酯弯曲件,并结合预紧弹簧,使手指具有相对较低的弯曲刚度;通过调节手指刚度,可以满足不同场景下的抓取需求. ...
Mechatronic design of a three-fingered gripper for underwater applications
2
2013
... Parameters of rigid end-effectors
Tab.6 刚性末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 传动方式 质量(空气)/kg 抓取力/N AMADEUS[92 ] 爱丁堡赫瑞瓦特大学 3指 — 液压 — 3.5 15.4 多关节刚性夹持器[93 ] 东海大学 2指 — 电动 齿轮+腱绳 — — 十二面体灵巧手[94 ] 哈佛大学 5指 1 100 电动 连杆 — — SeeGrip夹持器[95 ] 德国人工智能研究中心 3指 6 000 液压+电动 连杆 9.5 100 MARIS灵巧夹持器[96 ] 博洛尼亚大学 3指 50 电动 腱绳 4.5 150 HEU Hand I[97 ] 哈尔滨工程大学 3指 — 电动 腱绳 — — HEU Hand II[98 ] 哈尔滨工程大学 3指 — 电动 齿轮 3.1 8 GUH14[99 ] 卡拉布里亚大学/赫罗纳大学 3指 60 电动 齿轮+腱绳 0.3 — Ocean One hand[100 ] 斯坦福大学 3指 50 电动 腱绳 — 35 Three-Fingered Gripper[101 ] 博洛尼亚大学 3指 100 电动 蜗轮蜗杆 4.5 50 UNIBO[102 ] 博洛尼亚大学 3指 25 电动 腱绳 4.5 150
借助特定结构的可变形性,是实现末端执行器灵巧、柔顺特性的主要方式,其本质是增加了执行器的自由度. Lane等[92 ] 利用金属波纹管设计灵巧的三指夹持器AMADEUS,其手指由3个平行排列的金属波纹管组成,借助波纹管中的压力差可以实现手指±20°的弯曲. 链条结构由一系列可以相互转动的链节组成,类似于人手结构. 东海大学团队开发多关节的刚性夹持器,如图5 中(b)所示,手指由4节链条组成,通过齿轮机构调节手指角度,可以包络抓取不同形状的物体. 此外,可以借助张紧弹簧机构调节手指刚度,以应对水流干扰[93 ] . 另一种十二面体灵巧手,如图5 (c)所示,由于其独特的折叠结构设计,该灵巧手可以以0.2~0.5 m的幅度开合,能够承受1 100 m深海的高压,抓取水母等柔软的海洋生物[94 ] . 当面对非结构化环境时,对外部接触力、作业对象状态及动态变化的感知能力也是增强灵巧手的操作能力的前提条件. SeeGrip项目的灵活夹持器将触觉传感器嵌入到手指中,实现了实时反馈与精准控制[95 ] . MARIS项目(见图5 (g))将相机巧妙地放置在夹持器手掌中,使夹持器具备视觉感知功能[96 ] . ...
... 此外,在水下抓取作业中,传统执行器通过旋转关节实现手指的弯曲运动,在柔顺性上有所欠缺,很难抓取尺寸大于自身数倍的物体. 灵巧手Three-Fingered Gripper[101 ] ,如图5 (e)所示,用棱柱形关节替代手指的第一旋转关节,使手指能够向外延展,从而扩大了作业范围. UNIBO[102 ] (见图5 (f))采用改变手指相对位置的方式扩展工作空间,以提升柔顺性,并通过在食指与手掌之间设置垂直于掌面的旋转关节,使食指能够围绕手掌边缘线移动,从而具备不同的抓取姿态. ...
2
... Parameters of rigid end-effectors
Tab.6 刚性末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 传动方式 质量(空气)/kg 抓取力/N AMADEUS[92 ] 爱丁堡赫瑞瓦特大学 3指 — 液压 — 3.5 15.4 多关节刚性夹持器[93 ] 东海大学 2指 — 电动 齿轮+腱绳 — — 十二面体灵巧手[94 ] 哈佛大学 5指 1 100 电动 连杆 — — SeeGrip夹持器[95 ] 德国人工智能研究中心 3指 6 000 液压+电动 连杆 9.5 100 MARIS灵巧夹持器[96 ] 博洛尼亚大学 3指 50 电动 腱绳 4.5 150 HEU Hand I[97 ] 哈尔滨工程大学 3指 — 电动 腱绳 — — HEU Hand II[98 ] 哈尔滨工程大学 3指 — 电动 齿轮 3.1 8 GUH14[99 ] 卡拉布里亚大学/赫罗纳大学 3指 60 电动 齿轮+腱绳 0.3 — Ocean One hand[100 ] 斯坦福大学 3指 50 电动 腱绳 — 35 Three-Fingered Gripper[101 ] 博洛尼亚大学 3指 100 电动 蜗轮蜗杆 4.5 50 UNIBO[102 ] 博洛尼亚大学 3指 25 电动 腱绳 4.5 150
借助特定结构的可变形性,是实现末端执行器灵巧、柔顺特性的主要方式,其本质是增加了执行器的自由度. Lane等[92 ] 利用金属波纹管设计灵巧的三指夹持器AMADEUS,其手指由3个平行排列的金属波纹管组成,借助波纹管中的压力差可以实现手指±20°的弯曲. 链条结构由一系列可以相互转动的链节组成,类似于人手结构. 东海大学团队开发多关节的刚性夹持器,如图5 中(b)所示,手指由4节链条组成,通过齿轮机构调节手指角度,可以包络抓取不同形状的物体. 此外,可以借助张紧弹簧机构调节手指刚度,以应对水流干扰[93 ] . 另一种十二面体灵巧手,如图5 (c)所示,由于其独特的折叠结构设计,该灵巧手可以以0.2~0.5 m的幅度开合,能够承受1 100 m深海的高压,抓取水母等柔软的海洋生物[94 ] . 当面对非结构化环境时,对外部接触力、作业对象状态及动态变化的感知能力也是增强灵巧手的操作能力的前提条件. SeeGrip项目的灵活夹持器将触觉传感器嵌入到手指中,实现了实时反馈与精准控制[95 ] . MARIS项目(见图5 (g))将相机巧妙地放置在夹持器手掌中,使夹持器具备视觉感知功能[96 ] . ...
... 此外,在水下抓取作业中,传统执行器通过旋转关节实现手指的弯曲运动,在柔顺性上有所欠缺,很难抓取尺寸大于自身数倍的物体. 灵巧手Three-Fingered Gripper[101 ] ,如图5 (e)所示,用棱柱形关节替代手指的第一旋转关节,使手指能够向外延展,从而扩大了作业范围. UNIBO[102 ] (见图5 (f))采用改变手指相对位置的方式扩展工作空间,以提升柔顺性,并通过在食指与手掌之间设置垂直于掌面的旋转关节,使食指能够围绕手掌边缘线移动,从而具备不同的抓取姿态. ...
Programmable design of soft pneu-net actuators with oblique chambers can generate coupled bending and twisting motions
1
2018
... 流体驱动是软体执行器使用最广泛的驱动方式,利用流体压力引发柔性材料的形变,以实现预期的运动. 然而,由于柔性材料本身的形变是多方向且不规则的,需要一定的约束结构,例如加入限制层或缠绕纤维线来引导和限制变形,使其在特定方向上表现出预期的功能性变形(如弯曲、扭转或伸展). 在流体驱动的软体末端执行器中,纤维增强型执行器(fiber reinforcement actuator, FRA)和气动网格型执行器(pneumatic network actuator, PA)是2种主流的构型[103 ] ,如图6 所示. ...
Underwater mobile manipulation: a soft arm on a benthic legged robot
1
2020
... 流体驱动执行器的性能已在不同深度的水环境中得到了验证[104 -106 ] ,如图7 中(a)~(c)所示. Sinatra等[107 ] 设计超轻柔PA型执行器,其手指结构包括柔韧的硅胶基质和由柔性聚合物纳米纤维制成的应变限制层,可用于抓取凝胶状海洋生物,见图7 (e). 考虑到软体执行器在抓取时存在的不稳定、易滑落等问题,通过模仿自然界中具有高效抓取能力的生物结构,可以进一步提升其抓取性能. Dou等[108 ] 利用捕蝇草的包络结构来提升PA型抓手的抓取性能,并通过手指底层的纹理结构增加抓取时的摩擦力. 如图7 (d)所示,Wu等[109 ] 模仿章鱼臂制作水下软体夹持器,该夹持器由6个带有吸盘的触手及腹膜组成伞形结构,能够在保证柔软接触的同时增强表面抓握力,实现对不规则物体的稳定吸附和抓取. 如图7 (h)所示,受蟒蛇和触手头足类动物的启发,Galloway等[110 ] 制成FRA型软体手,该软体手能够从接近笔直的形态转变为完全蜷缩的形态. 此外,一种软膜结构的抓手也被成功应用于水下1000 m的抓取任务. 该抓手利用堵塞原理,即在充满颗粒的膜内部与膜周围流体之间形成压差,来改变抓手刚度并实现抓取功能,见图7 (g)[111 ] . ...
An opposite-bending-and-extension soft robotic manipulator for delicate grasping in shallow water
0
2019
Shipboard design and fabrication of custom 3D-printed soft robotic manipulators for the investigation of delicate deep-sea organisms
2
2018
... 流体驱动执行器的性能已在不同深度的水环境中得到了验证[104 -106 ] ,如图7 中(a)~(c)所示. Sinatra等[107 ] 设计超轻柔PA型执行器,其手指结构包括柔韧的硅胶基质和由柔性聚合物纳米纤维制成的应变限制层,可用于抓取凝胶状海洋生物,见图7 (e). 考虑到软体执行器在抓取时存在的不稳定、易滑落等问题,通过模仿自然界中具有高效抓取能力的生物结构,可以进一步提升其抓取性能. Dou等[108 ] 利用捕蝇草的包络结构来提升PA型抓手的抓取性能,并通过手指底层的纹理结构增加抓取时的摩擦力. 如图7 (d)所示,Wu等[109 ] 模仿章鱼臂制作水下软体夹持器,该夹持器由6个带有吸盘的触手及腹膜组成伞形结构,能够在保证柔软接触的同时增强表面抓握力,实现对不规则物体的稳定吸附和抓取. 如图7 (h)所示,受蟒蛇和触手头足类动物的启发,Galloway等[110 ] 制成FRA型软体手,该软体手能够从接近笔直的形态转变为完全蜷缩的形态. 此外,一种软膜结构的抓手也被成功应用于水下1000 m的抓取任务. 该抓手利用堵塞原理,即在充满颗粒的膜内部与膜周围流体之间形成压差,来改变抓手刚度并实现抓取功能,见图7 (g)[111 ] . ...
... Parameters of soft end-effectors
Tab.7 软体末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 质量(空气)/kg 抓取力/N 3D打印的PA型抓手[106 ] 哈佛大学 4指 2 224 气动 — 16.6 超轻柔PA型执行器[107 ] 哈佛大学 6指 — 气动 — 0.7 仿捕蝇草PA型抓手[108 ] 沈阳自动化研究所 3指 — 气动 — — 仿章鱼臂软体夹持器[109 ] 北京大学 伞形 1.5 气动 — 3.8 FRA型软体手[110 ] 哈佛大学 1指 170 气动 — 52.9 软膜抓手[111 ] 贡比涅技术大学/罗德岛大学 伞形 1 000 气动 — 25.1 SMA拟人手指[115 ] 阿克伦大学 1指 — SMA 0.044 9.01 SMA夹持器[116 ] 德尔夫特理工大学 4指 — SMA — —
5. 结 语 水下机械手是现代海洋工程、深海探测和海洋资源开发中的重要工具,应用前景广阔,其发展趋势主要体现在以下4个方面. ...
Ultragentle manipulation of delicate structures using a soft robotic gripper
2
2019
... 流体驱动执行器的性能已在不同深度的水环境中得到了验证[104 -106 ] ,如图7 中(a)~(c)所示. Sinatra等[107 ] 设计超轻柔PA型执行器,其手指结构包括柔韧的硅胶基质和由柔性聚合物纳米纤维制成的应变限制层,可用于抓取凝胶状海洋生物,见图7 (e). 考虑到软体执行器在抓取时存在的不稳定、易滑落等问题,通过模仿自然界中具有高效抓取能力的生物结构,可以进一步提升其抓取性能. Dou等[108 ] 利用捕蝇草的包络结构来提升PA型抓手的抓取性能,并通过手指底层的纹理结构增加抓取时的摩擦力. 如图7 (d)所示,Wu等[109 ] 模仿章鱼臂制作水下软体夹持器,该夹持器由6个带有吸盘的触手及腹膜组成伞形结构,能够在保证柔软接触的同时增强表面抓握力,实现对不规则物体的稳定吸附和抓取. 如图7 (h)所示,受蟒蛇和触手头足类动物的启发,Galloway等[110 ] 制成FRA型软体手,该软体手能够从接近笔直的形态转变为完全蜷缩的形态. 此外,一种软膜结构的抓手也被成功应用于水下1000 m的抓取任务. 该抓手利用堵塞原理,即在充满颗粒的膜内部与膜周围流体之间形成压差,来改变抓手刚度并实现抓取功能,见图7 (g)[111 ] . ...
... Parameters of soft end-effectors
Tab.7 软体末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 质量(空气)/kg 抓取力/N 3D打印的PA型抓手[106 ] 哈佛大学 4指 2 224 气动 — 16.6 超轻柔PA型执行器[107 ] 哈佛大学 6指 — 气动 — 0.7 仿捕蝇草PA型抓手[108 ] 沈阳自动化研究所 3指 — 气动 — — 仿章鱼臂软体夹持器[109 ] 北京大学 伞形 1.5 气动 — 3.8 FRA型软体手[110 ] 哈佛大学 1指 170 气动 — 52.9 软膜抓手[111 ] 贡比涅技术大学/罗德岛大学 伞形 1 000 气动 — 25.1 SMA拟人手指[115 ] 阿克伦大学 1指 — SMA 0.044 9.01 SMA夹持器[116 ] 德尔夫特理工大学 4指 — SMA — —
5. 结 语 水下机械手是现代海洋工程、深海探测和海洋资源开发中的重要工具,应用前景广阔,其发展趋势主要体现在以下4个方面. ...
2
... 流体驱动执行器的性能已在不同深度的水环境中得到了验证[104 -106 ] ,如图7 中(a)~(c)所示. Sinatra等[107 ] 设计超轻柔PA型执行器,其手指结构包括柔韧的硅胶基质和由柔性聚合物纳米纤维制成的应变限制层,可用于抓取凝胶状海洋生物,见图7 (e). 考虑到软体执行器在抓取时存在的不稳定、易滑落等问题,通过模仿自然界中具有高效抓取能力的生物结构,可以进一步提升其抓取性能. Dou等[108 ] 利用捕蝇草的包络结构来提升PA型抓手的抓取性能,并通过手指底层的纹理结构增加抓取时的摩擦力. 如图7 (d)所示,Wu等[109 ] 模仿章鱼臂制作水下软体夹持器,该夹持器由6个带有吸盘的触手及腹膜组成伞形结构,能够在保证柔软接触的同时增强表面抓握力,实现对不规则物体的稳定吸附和抓取. 如图7 (h)所示,受蟒蛇和触手头足类动物的启发,Galloway等[110 ] 制成FRA型软体手,该软体手能够从接近笔直的形态转变为完全蜷缩的形态. 此外,一种软膜结构的抓手也被成功应用于水下1000 m的抓取任务. 该抓手利用堵塞原理,即在充满颗粒的膜内部与膜周围流体之间形成压差,来改变抓手刚度并实现抓取功能,见图7 (g)[111 ] . ...
... Parameters of soft end-effectors
Tab.7 软体末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 质量(空气)/kg 抓取力/N 3D打印的PA型抓手[106 ] 哈佛大学 4指 2 224 气动 — 16.6 超轻柔PA型执行器[107 ] 哈佛大学 6指 — 气动 — 0.7 仿捕蝇草PA型抓手[108 ] 沈阳自动化研究所 3指 — 气动 — — 仿章鱼臂软体夹持器[109 ] 北京大学 伞形 1.5 气动 — 3.8 FRA型软体手[110 ] 哈佛大学 1指 170 气动 — 52.9 软膜抓手[111 ] 贡比涅技术大学/罗德岛大学 伞形 1 000 气动 — 25.1 SMA拟人手指[115 ] 阿克伦大学 1指 — SMA 0.044 9.01 SMA夹持器[116 ] 德尔夫特理工大学 4指 — SMA — —
5. 结 语 水下机械手是现代海洋工程、深海探测和海洋资源开发中的重要工具,应用前景广阔,其发展趋势主要体现在以下4个方面. ...
Octopus-inspired underwater soft robotic gripper with crawling and swimming capabilities
2
2024
... 流体驱动执行器的性能已在不同深度的水环境中得到了验证[104 -106 ] ,如图7 中(a)~(c)所示. Sinatra等[107 ] 设计超轻柔PA型执行器,其手指结构包括柔韧的硅胶基质和由柔性聚合物纳米纤维制成的应变限制层,可用于抓取凝胶状海洋生物,见图7 (e). 考虑到软体执行器在抓取时存在的不稳定、易滑落等问题,通过模仿自然界中具有高效抓取能力的生物结构,可以进一步提升其抓取性能. Dou等[108 ] 利用捕蝇草的包络结构来提升PA型抓手的抓取性能,并通过手指底层的纹理结构增加抓取时的摩擦力. 如图7 (d)所示,Wu等[109 ] 模仿章鱼臂制作水下软体夹持器,该夹持器由6个带有吸盘的触手及腹膜组成伞形结构,能够在保证柔软接触的同时增强表面抓握力,实现对不规则物体的稳定吸附和抓取. 如图7 (h)所示,受蟒蛇和触手头足类动物的启发,Galloway等[110 ] 制成FRA型软体手,该软体手能够从接近笔直的形态转变为完全蜷缩的形态. 此外,一种软膜结构的抓手也被成功应用于水下1000 m的抓取任务. 该抓手利用堵塞原理,即在充满颗粒的膜内部与膜周围流体之间形成压差,来改变抓手刚度并实现抓取功能,见图7 (g)[111 ] . ...
... Parameters of soft end-effectors
Tab.7 软体末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 质量(空气)/kg 抓取力/N 3D打印的PA型抓手[106 ] 哈佛大学 4指 2 224 气动 — 16.6 超轻柔PA型执行器[107 ] 哈佛大学 6指 — 气动 — 0.7 仿捕蝇草PA型抓手[108 ] 沈阳自动化研究所 3指 — 气动 — — 仿章鱼臂软体夹持器[109 ] 北京大学 伞形 1.5 气动 — 3.8 FRA型软体手[110 ] 哈佛大学 1指 170 气动 — 52.9 软膜抓手[111 ] 贡比涅技术大学/罗德岛大学 伞形 1 000 气动 — 25.1 SMA拟人手指[115 ] 阿克伦大学 1指 — SMA 0.044 9.01 SMA夹持器[116 ] 德尔夫特理工大学 4指 — SMA — —
5. 结 语 水下机械手是现代海洋工程、深海探测和海洋资源开发中的重要工具,应用前景广阔,其发展趋势主要体现在以下4个方面. ...
Soft robotic grippers for biological sampling on deep reefs
2
2016
... 流体驱动执行器的性能已在不同深度的水环境中得到了验证[104 -106 ] ,如图7 中(a)~(c)所示. Sinatra等[107 ] 设计超轻柔PA型执行器,其手指结构包括柔韧的硅胶基质和由柔性聚合物纳米纤维制成的应变限制层,可用于抓取凝胶状海洋生物,见图7 (e). 考虑到软体执行器在抓取时存在的不稳定、易滑落等问题,通过模仿自然界中具有高效抓取能力的生物结构,可以进一步提升其抓取性能. Dou等[108 ] 利用捕蝇草的包络结构来提升PA型抓手的抓取性能,并通过手指底层的纹理结构增加抓取时的摩擦力. 如图7 (d)所示,Wu等[109 ] 模仿章鱼臂制作水下软体夹持器,该夹持器由6个带有吸盘的触手及腹膜组成伞形结构,能够在保证柔软接触的同时增强表面抓握力,实现对不规则物体的稳定吸附和抓取. 如图7 (h)所示,受蟒蛇和触手头足类动物的启发,Galloway等[110 ] 制成FRA型软体手,该软体手能够从接近笔直的形态转变为完全蜷缩的形态. 此外,一种软膜结构的抓手也被成功应用于水下1000 m的抓取任务. 该抓手利用堵塞原理,即在充满颗粒的膜内部与膜周围流体之间形成压差,来改变抓手刚度并实现抓取功能,见图7 (g)[111 ] . ...
... Parameters of soft end-effectors
Tab.7 软体末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 质量(空气)/kg 抓取力/N 3D打印的PA型抓手[106 ] 哈佛大学 4指 2 224 气动 — 16.6 超轻柔PA型执行器[107 ] 哈佛大学 6指 — 气动 — 0.7 仿捕蝇草PA型抓手[108 ] 沈阳自动化研究所 3指 — 气动 — — 仿章鱼臂软体夹持器[109 ] 北京大学 伞形 1.5 气动 — 3.8 FRA型软体手[110 ] 哈佛大学 1指 170 气动 — 52.9 软膜抓手[111 ] 贡比涅技术大学/罗德岛大学 伞形 1 000 气动 — 25.1 SMA拟人手指[115 ] 阿克伦大学 1指 — SMA 0.044 9.01 SMA夹持器[116 ] 德尔夫特理工大学 4指 — SMA — —
5. 结 语 水下机械手是现代海洋工程、深海探测和海洋资源开发中的重要工具,应用前景广阔,其发展趋势主要体现在以下4个方面. ...
2
... 流体驱动执行器的性能已在不同深度的水环境中得到了验证[104 -106 ] ,如图7 中(a)~(c)所示. Sinatra等[107 ] 设计超轻柔PA型执行器,其手指结构包括柔韧的硅胶基质和由柔性聚合物纳米纤维制成的应变限制层,可用于抓取凝胶状海洋生物,见图7 (e). 考虑到软体执行器在抓取时存在的不稳定、易滑落等问题,通过模仿自然界中具有高效抓取能力的生物结构,可以进一步提升其抓取性能. Dou等[108 ] 利用捕蝇草的包络结构来提升PA型抓手的抓取性能,并通过手指底层的纹理结构增加抓取时的摩擦力. 如图7 (d)所示,Wu等[109 ] 模仿章鱼臂制作水下软体夹持器,该夹持器由6个带有吸盘的触手及腹膜组成伞形结构,能够在保证柔软接触的同时增强表面抓握力,实现对不规则物体的稳定吸附和抓取. 如图7 (h)所示,受蟒蛇和触手头足类动物的启发,Galloway等[110 ] 制成FRA型软体手,该软体手能够从接近笔直的形态转变为完全蜷缩的形态. 此外,一种软膜结构的抓手也被成功应用于水下1000 m的抓取任务. 该抓手利用堵塞原理,即在充满颗粒的膜内部与膜周围流体之间形成压差,来改变抓手刚度并实现抓取功能,见图7 (g)[111 ] . ...
... Parameters of soft end-effectors
Tab.7 软体末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 质量(空气)/kg 抓取力/N 3D打印的PA型抓手[106 ] 哈佛大学 4指 2 224 气动 — 16.6 超轻柔PA型执行器[107 ] 哈佛大学 6指 — 气动 — 0.7 仿捕蝇草PA型抓手[108 ] 沈阳自动化研究所 3指 — 气动 — — 仿章鱼臂软体夹持器[109 ] 北京大学 伞形 1.5 气动 — 3.8 FRA型软体手[110 ] 哈佛大学 1指 170 气动 — 52.9 软膜抓手[111 ] 贡比涅技术大学/罗德岛大学 伞形 1 000 气动 — 25.1 SMA拟人手指[115 ] 阿克伦大学 1指 — SMA 0.044 9.01 SMA夹持器[116 ] 德尔夫特理工大学 4指 — SMA — —
5. 结 语 水下机械手是现代海洋工程、深海探测和海洋资源开发中的重要工具,应用前景广阔,其发展趋势主要体现在以下4个方面. ...
Soft robotic grippers: a review on technologies, materials, and applications
1
2024
... 智能材料驱动方式利用智能材料在外部刺激下发生的形变来带动执行器结构运动,主要分为电活性聚合物(electroactive polymer, EAP)驱动和形状记忆合金(shape memory alloy, SMA)驱动[112 ] . 前者利用了材料在电场作用下的弯曲和拉伸特性,后者利用温度诱导下的SMA马氏体相变,使材料形状和刚度发生显著变化,从而实现执行器的驱动. 尽管EAP驱动已经在水下机器人中得到了广泛应用,但是其在软体手上的水下应用实例还很少见[113 -114 ] . Engeberg等[115 ] 通过向带有关节凹槽的拟人橡胶手指中嵌入SMA致动器制成水下软体手;加热时SMA弯曲,同时带动手指弯曲. 另一款SMA驱动的软体夹持器由上层中空结构的热塑性聚氨酯手指和下层的SMA致动器组成,能够实现弯曲动作,如图7 (f)所示[116 ] . ...
1
... 智能材料驱动方式利用智能材料在外部刺激下发生的形变来带动执行器结构运动,主要分为电活性聚合物(electroactive polymer, EAP)驱动和形状记忆合金(shape memory alloy, SMA)驱动[112 ] . 前者利用了材料在电场作用下的弯曲和拉伸特性,后者利用温度诱导下的SMA马氏体相变,使材料形状和刚度发生显著变化,从而实现执行器的驱动. 尽管EAP驱动已经在水下机器人中得到了广泛应用,但是其在软体手上的水下应用实例还很少见[113 -114 ] . Engeberg等[115 ] 通过向带有关节凹槽的拟人橡胶手指中嵌入SMA致动器制成水下软体手;加热时SMA弯曲,同时带动手指弯曲. 另一款SMA驱动的软体夹持器由上层中空结构的热塑性聚氨酯手指和下层的SMA致动器组成,能够实现弯曲动作,如图7 (f)所示[116 ] . ...
Energy minimization for self-organized structure formation and actuation
1
2007
... 智能材料驱动方式利用智能材料在外部刺激下发生的形变来带动执行器结构运动,主要分为电活性聚合物(electroactive polymer, EAP)驱动和形状记忆合金(shape memory alloy, SMA)驱动[112 ] . 前者利用了材料在电场作用下的弯曲和拉伸特性,后者利用温度诱导下的SMA马氏体相变,使材料形状和刚度发生显著变化,从而实现执行器的驱动. 尽管EAP驱动已经在水下机器人中得到了广泛应用,但是其在软体手上的水下应用实例还很少见[113 -114 ] . Engeberg等[115 ] 通过向带有关节凹槽的拟人橡胶手指中嵌入SMA致动器制成水下软体手;加热时SMA弯曲,同时带动手指弯曲. 另一款SMA驱动的软体夹持器由上层中空结构的热塑性聚氨酯手指和下层的SMA致动器组成,能够实现弯曲动作,如图7 (f)所示[116 ] . ...
Anthropomorphic finger antagonistically actuated by SMA plates
2
2015
... 智能材料驱动方式利用智能材料在外部刺激下发生的形变来带动执行器结构运动,主要分为电活性聚合物(electroactive polymer, EAP)驱动和形状记忆合金(shape memory alloy, SMA)驱动[112 ] . 前者利用了材料在电场作用下的弯曲和拉伸特性,后者利用温度诱导下的SMA马氏体相变,使材料形状和刚度发生显著变化,从而实现执行器的驱动. 尽管EAP驱动已经在水下机器人中得到了广泛应用,但是其在软体手上的水下应用实例还很少见[113 -114 ] . Engeberg等[115 ] 通过向带有关节凹槽的拟人橡胶手指中嵌入SMA致动器制成水下软体手;加热时SMA弯曲,同时带动手指弯曲. 另一款SMA驱动的软体夹持器由上层中空结构的热塑性聚氨酯手指和下层的SMA致动器组成,能够实现弯曲动作,如图7 (f)所示[116 ] . ...
... Parameters of soft end-effectors
Tab.7 软体末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 质量(空气)/kg 抓取力/N 3D打印的PA型抓手[106 ] 哈佛大学 4指 2 224 气动 — 16.6 超轻柔PA型执行器[107 ] 哈佛大学 6指 — 气动 — 0.7 仿捕蝇草PA型抓手[108 ] 沈阳自动化研究所 3指 — 气动 — — 仿章鱼臂软体夹持器[109 ] 北京大学 伞形 1.5 气动 — 3.8 FRA型软体手[110 ] 哈佛大学 1指 170 气动 — 52.9 软膜抓手[111 ] 贡比涅技术大学/罗德岛大学 伞形 1 000 气动 — 25.1 SMA拟人手指[115 ] 阿克伦大学 1指 — SMA 0.044 9.01 SMA夹持器[116 ] 德尔夫特理工大学 4指 — SMA — —
5. 结 语 水下机械手是现代海洋工程、深海探测和海洋资源开发中的重要工具,应用前景广阔,其发展趋势主要体现在以下4个方面. ...
2
... 智能材料驱动方式利用智能材料在外部刺激下发生的形变来带动执行器结构运动,主要分为电活性聚合物(electroactive polymer, EAP)驱动和形状记忆合金(shape memory alloy, SMA)驱动[112 ] . 前者利用了材料在电场作用下的弯曲和拉伸特性,后者利用温度诱导下的SMA马氏体相变,使材料形状和刚度发生显著变化,从而实现执行器的驱动. 尽管EAP驱动已经在水下机器人中得到了广泛应用,但是其在软体手上的水下应用实例还很少见[113 -114 ] . Engeberg等[115 ] 通过向带有关节凹槽的拟人橡胶手指中嵌入SMA致动器制成水下软体手;加热时SMA弯曲,同时带动手指弯曲. 另一款SMA驱动的软体夹持器由上层中空结构的热塑性聚氨酯手指和下层的SMA致动器组成,能够实现弯曲动作,如图7 (f)所示[116 ] . ...
... Parameters of soft end-effectors
Tab.7 软体末端执行器名称 研发单位 手指结构 工作水深/m 驱动方式 质量(空气)/kg 抓取力/N 3D打印的PA型抓手[106 ] 哈佛大学 4指 2 224 气动 — 16.6 超轻柔PA型执行器[107 ] 哈佛大学 6指 — 气动 — 0.7 仿捕蝇草PA型抓手[108 ] 沈阳自动化研究所 3指 — 气动 — — 仿章鱼臂软体夹持器[109 ] 北京大学 伞形 1.5 气动 — 3.8 FRA型软体手[110 ] 哈佛大学 1指 170 气动 — 52.9 软膜抓手[111 ] 贡比涅技术大学/罗德岛大学 伞形 1 000 气动 — 25.1 SMA拟人手指[115 ] 阿克伦大学 1指 — SMA 0.044 9.01 SMA夹持器[116 ] 德尔夫特理工大学 4指 — SMA — —
5. 结 语 水下机械手是现代海洋工程、深海探测和海洋资源开发中的重要工具,应用前景广阔,其发展趋势主要体现在以下4个方面. ...


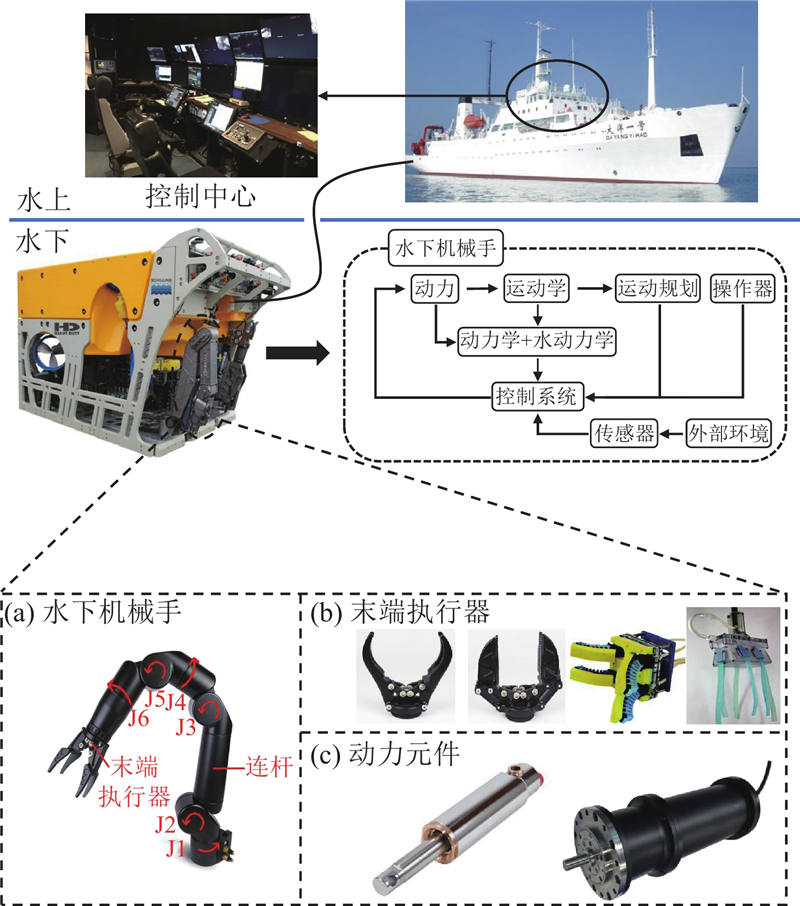
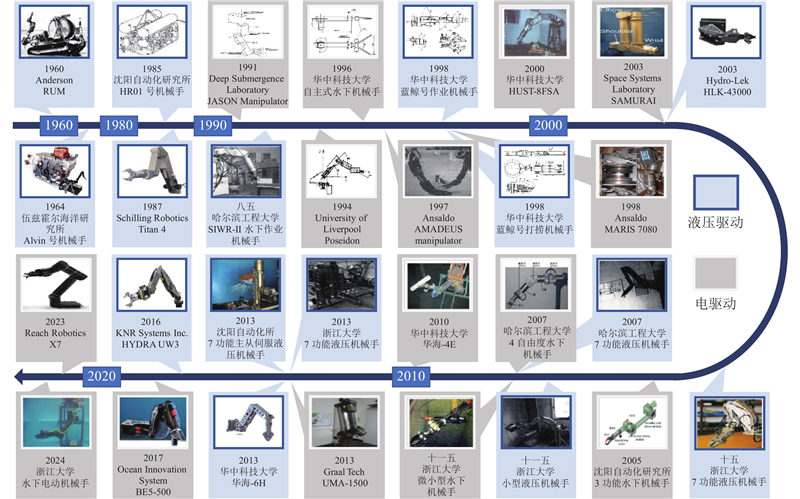
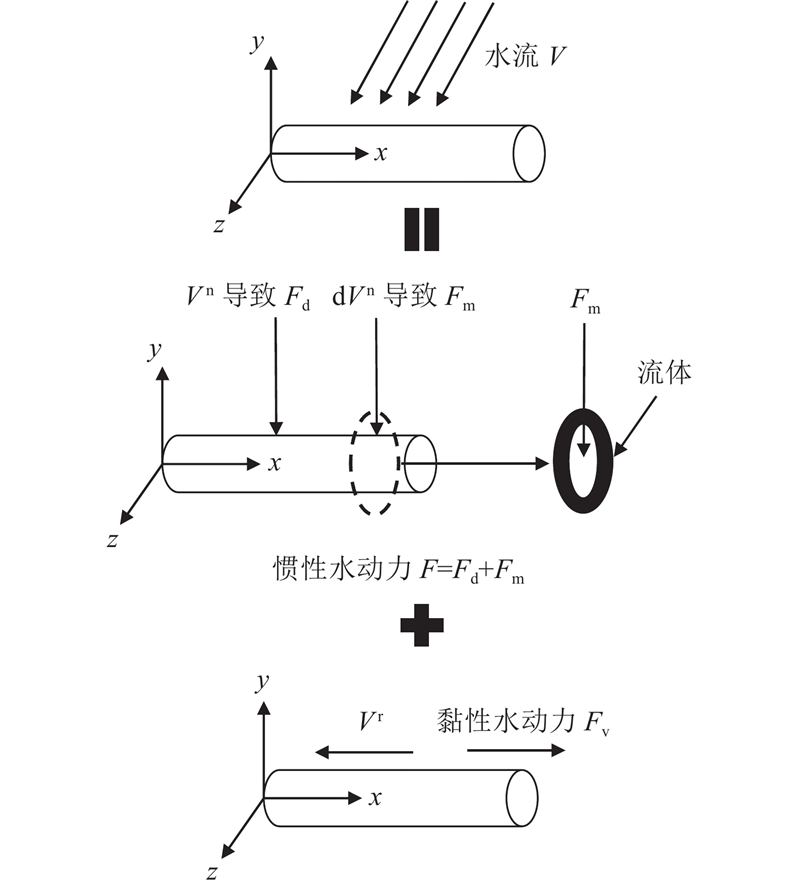
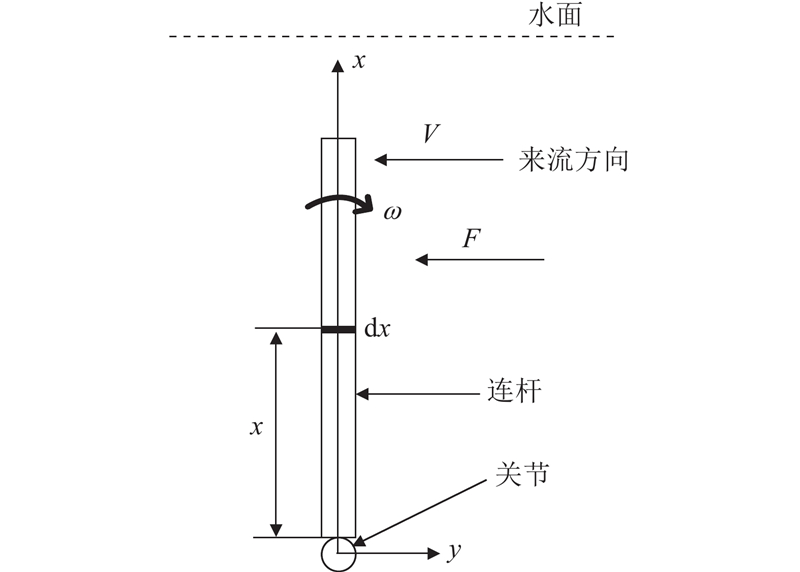
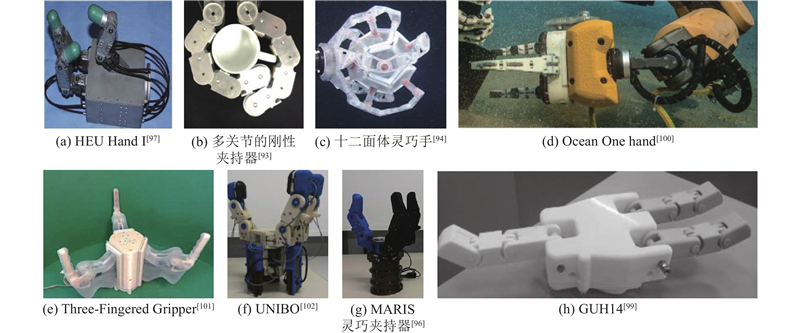
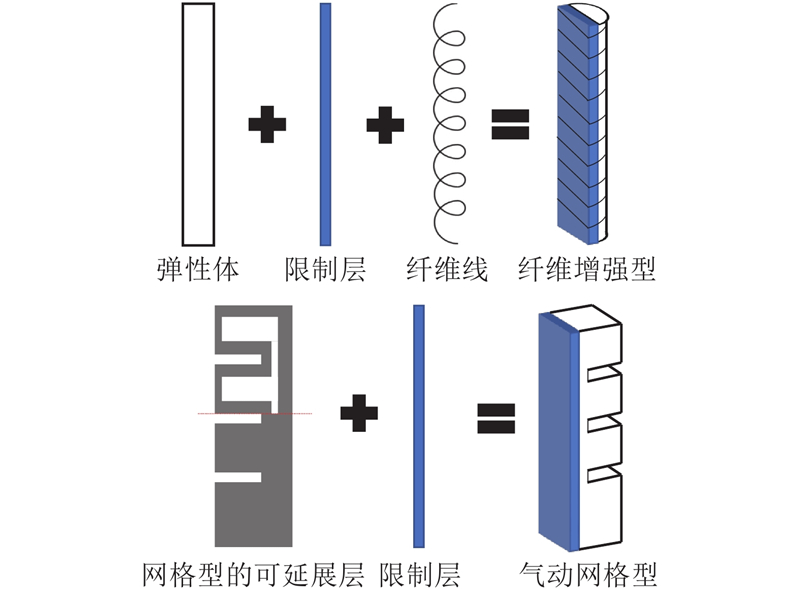
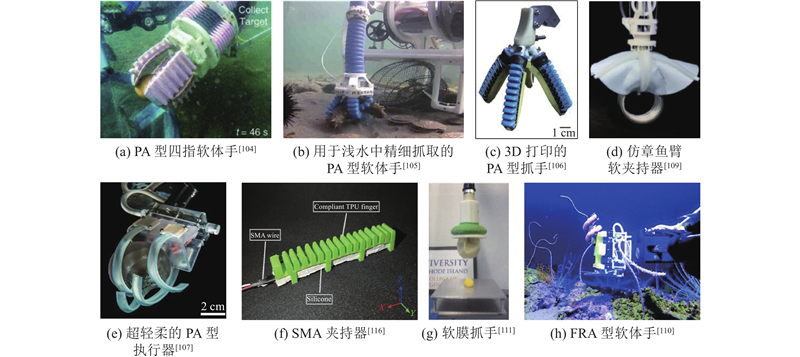

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}