


本文链接:
管道是一种用于输送气体、液体等流体的装置,管道的使用不仅提升了安全性和便捷性,还减少了人力、物力资源的浪费[1]。然而,在长期的使用过程中,管道难免会出现变形、微小裂纹和异物堵塞等问题,若不及时发现并处理,则会造成一些不必要的损失。因此,开展定期、有效、可靠的管道检测十分重要[2]。大型管道可采用人与机器人相配合的方式进行检修,而狭窄环境的管道检修只能依靠机器人完成[3]。管道机器人的驱动结构与摩擦结构是实现自主移动的重要部分。传统的刚性管道机器人大多以直流电机作为动力装置[4],以轮子[5]、履带[6]及其混合形式[7]作为行走装置。刚性机器人虽具有速度快、效率高和精度高等优点,但存在整体外形笨重、体积大、转弯角度较苛刻和难以适应未知结构化环境等缺陷,尤其在通过一些连续弯曲管道或小角度管道时,刚性机器人难以完成。
相较于传统的刚性机器人,软体机器人凭借良好的灵活性、柔顺性、适应性以及人机交互安全性等优点,在众多领域内均展现出巨大的应用潜力,尤其是在一些狭窄、未知的环境中,软体机器人的优势得到了充分体现[8]。折纸结构[9-10]具有轻便、易折叠、可塑性强和柔韧性好等特点,基于其折叠性可形成功能丰富的软体机器人,这可为软体管道机器人的设计提供新思路。Liu等人[11]受Kresling折纸结构[12-13]的启发,提出了一种由6个Kresling折纸单元组成的气动软体机器人,其可适应55~71 mm内径的管道。Ze等人[14]基于Kresling折纸结构可折叠、变形的特性设计了一种微型磁驱动软体机器人,通过改变磁场强度来控制机器人的运动方向及结构刚度,该机器人可在受限的空间中运动,这可为生物医学领域中微创设备的应用提供参考。Belke等人[15]基于Kresling折纸结构可变形的优点,设计了一款可重构的折纸机器人,其不同模块具有不同的功能,且各模块之间可相互重组,以满足不同的环境要求。此外,自然界中动植物的运动和结构特性也为软体机器人的设计提供了启发,如仿蠕虫[16]、蛇[17]、章鱼[18]灵活运动特性的软体机器人以及基于植物生长[19]、捕食[20]等原理的软体机器人等。软体机器人有效弥补了刚性机器人的不足,对相关的工业生产[21]、军事国防[22]、航空航天[23]、勘测救援[24]等领域的发展起到了促进作用。
为弥补传统刚性管道机器人体积大、适应性差等不足,受蠕虫灵活爬行运动的启发,本文设计了一种基于Kresling折纸结构的软体管道机器人。首先,对机器人的伸缩结构和摩擦结构进行设计;然后,对机器人的爬行速度和负载性能进行分析;最后,制作机器人样机并在不同管道环境中开展实验,以展示机器人良好的适应性和灵活性。
1 软体管道机器人结构设计及样机制作
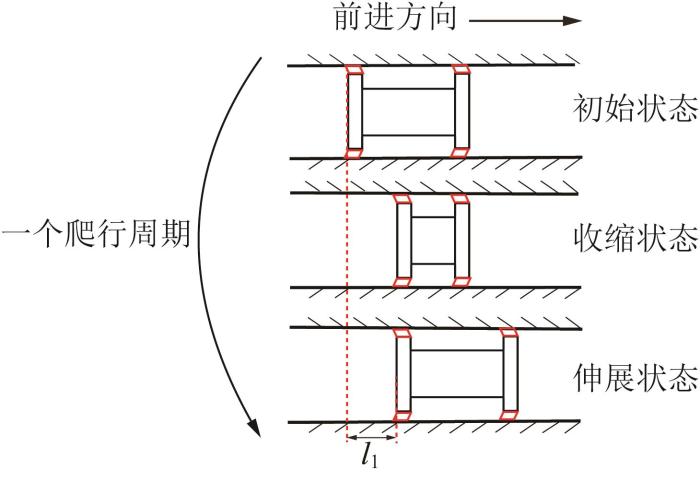
水蛭、蛔虫等蠕虫的运动方式称为蠕动爬行运动。以水蛭的蠕动爬行为例,水蛭身体前后两端各有1个吸盘,当其在地面上爬行时,前端吸盘固着地面,身体收缩带动后端吸盘向前运动;然后,后端吸盘与地面接触以实现锚定,前端吸盘与地面松开,身体伸长以推动前端吸盘移动。受蠕动爬行方式启发,要实现软体机器人在管道中的运动,须满足以下2个要求:1)具有可实现轴向移动的伸缩结构;2)具有可实现锚定的摩擦结构。
本文所设计的软体管道机器人的运动原理如图1所示。当机器人从初始状态转换至收缩状态时,前端摩擦结构与管道内壁之间的摩擦较大,用于提供锚定力,中间段伸缩结构收缩以带动后端向前移动;当机器人从收缩状态转换至伸展状态时,后端摩擦结构与管道内壁之间的摩擦较大,用于提供锚定力,伸缩结构伸展以推动前端移动。单个爬行周期内前进的距离为伸缩结构的长度变化量,重复上述运动方式即可实现机器人的连续爬行。
图1
1.1 机器人伸缩结构设计
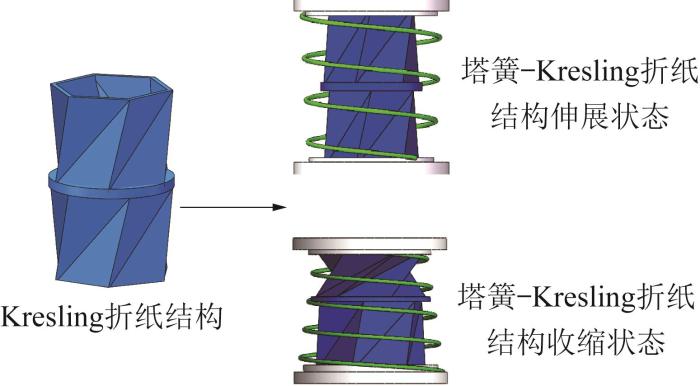
伸缩结构是驱动软体管道机器人轴向移动的关键装置,其性能影响机器人的位移和运动速度。本文机器人的伸缩结构由双层阵列型Kresling折纸结构组成,2层折纸结构之间用间隔盘和螺钉固定。针对收缩的折纸结构回弹时恢复时间长或无法完全伸展的问题,采用塔簧辅助收缩的折纸结构快速回弹,塔簧套在2层折纸结构外围。塔簧-Kresling折纸结构的伸展、收缩状态如图2所示。
图2
1.2 机器人摩擦结构设计
所设计的软体管道机器人采用4条硅胶材质的柔性摩擦带作为摩擦结构,前端与后端各放置2条,利用前后摩擦差异性为机器人的爬行提供锚定力。柔性摩擦带的结构如图3所示,合适的摩擦力有助于机器人爬行,而摩擦力大小由摩擦结构与管道之间的接触法向力、摩擦系数决定。因此,将摩擦带带型设计为斜纹形式,采用摩擦系数较大的硅胶制成,硅胶良好的柔韧性、变形能力有助于摩擦带与弧形管道接触。
图3
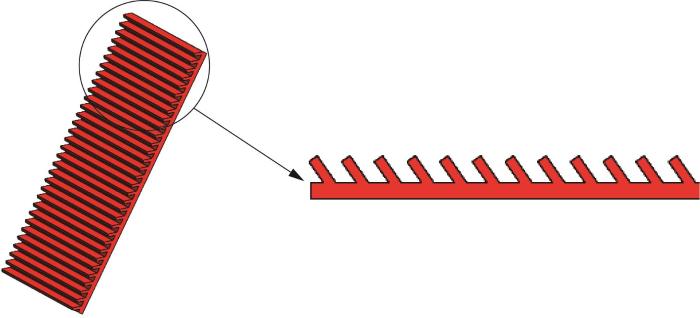
图4
1.3 摩擦带受力分析
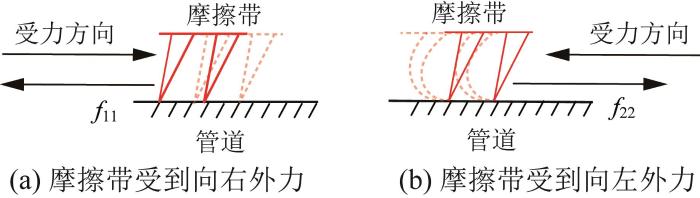
了解摩擦带在机器人爬行过程中的受力情况有助于从摩擦学角度提高机器人的运动速度。软体管道机器人爬行过程中摩擦带的受力分析如图5所示。在伸缩结构从初始状态转换为收缩状态的过程中,前端摩擦带与管道内壁之间的摩擦力
图5
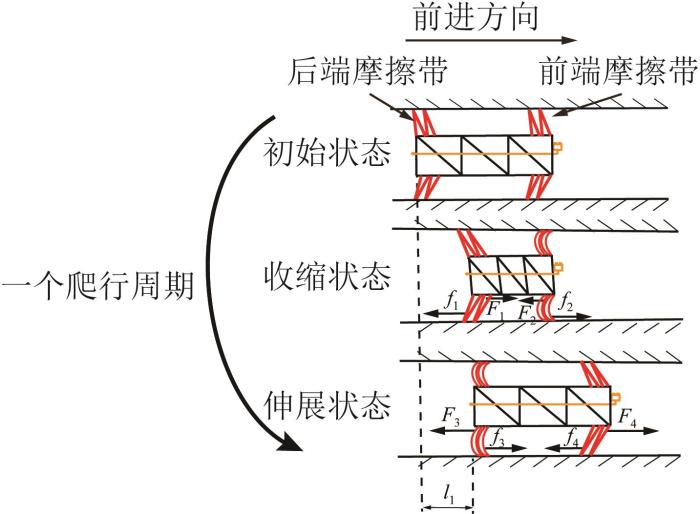
图5
机器人爬行过程中摩擦带受力分析
Fig.5
Force analysis of friction belt during robot crawling process
由此可得,在机器人收缩和伸展的过程中,前、后端摩擦带的受力满足以下平衡方程:
式中:Fs为塔簧的弹力,Fp为Kresling折纸结构的弹力,Fw为尼龙线的拉力。
1.4 机器人整体结构设计
图6
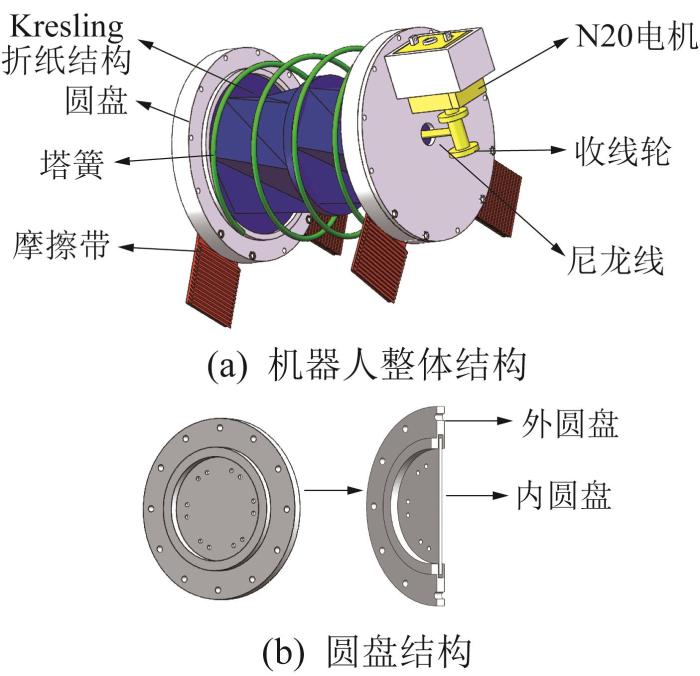
Kresling折纸结构的收缩通过尼龙线带动,尼龙线贯穿前后2个圆盘,一端固定在收线轮上,另一端用铝套固定。N20电机旋转拉动尼龙线,收线轮将电机的旋转运动转化成尼龙线的平移运动。当伸缩结构由收缩状态转换为伸展状态时,电机断电停转,依靠塔簧和Kresling折纸结构的弹力放松尼龙线,尼龙线伸展并带动电机反转。电机单方向的主动旋转简化了机器人的控制过程,只需控制电机通电、断电即可使伸缩结构不断地实现收缩、伸展的重复运动,从而驱动机器人在管道内连续爬行。
1.5 机器人样机制作与爬行展示
为验证软体管道机器人结构设计的可行性,制作机器人样机并在内径为96 mm的管道中开展爬行实验。机器人样机的控制系统由三部分组成:计算机控制端、电源装置以及Arduino开发板。电源装置为Arduino开发板提供工作电压,计算机控制端将编写的程序通过Arduino开发板传递给电机,用于调整电机的转动及停转时间。机器人样机的控制系统及其爬行效果如图7所示(电机转速为200 r/min,单次转动时间为80 ms,停转时间为300 ms)。爬行实验结果表明,在13.6 s的运动时间内,机器人的爬行距离约为230 mm,爬行速度可达16.91 mm/s,由此说明该机器人能在管道中连续爬行,验证了其结构设计的可行性。
图7
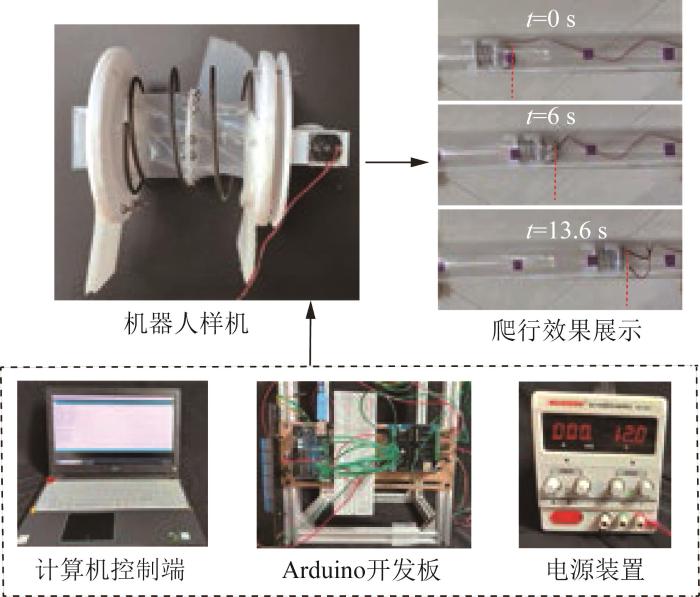
图7
机器人样机的控制系统及其爬行效果
Fig.7
Control system of robot prototype and its crawling effect
2 软体管道机器人性能分析
2.1 机器人爬行速度分析
软体管道机器人的爬行能力可等效为机器人穿过管道的速度,速度越快,则爬行能力越强。机器人的爬行速度等于其移动距离与爬行周期的比值。其中:移动距离主要取决于伸缩结构的伸缩变化量,而爬行周期与电机的转动时间、伸缩结构的伸展时间等有关。
2.1.1 伸缩结构类型对爬行速度的影响
软体管道机器人的爬行速度受伸缩结构类型的影响,在一定范围内,伸缩结构回弹的时间越短,则爬行速度越快。为确定塔簧-Kresling折纸结构、塔簧结构和Kresling折纸结构中哪种更适合作软体管道机器人的伸缩结构,开展爬行实验并进行对比。选择在内径为96 mm的管道中开展实验,其他条件(塔簧线径、刚度,电机工作参数,Kresling折纸结构材质、角度参数等)均保持一致。3种伸缩结构对机器人爬行速度的影响如图8所示。结果显示:采用塔簧结构的机器人的爬行速度比采用Kresling折纸结构的快,但采用这2种结构的机器人的爬行速度均小于采用塔簧-Kresling折纸结构的,且采用塔簧-Kresling折纸结构的机器人的爬行速度约为单独采用其他2种结构的爬行速度之和,为采用Kresling折纸结构的机器人爬行速度的2倍多。出现上述现象的原因可能是弹性越大的伸缩结构在收缩后所储存的弹性势能越多,在伸展过程中弹性势能转化成动能的速度更快,时间更短。因此,在电机扭矩范围内,选择弹性大的伸缩结构在一定程度上有助于提高机器人的爬行速度,故本文选用塔簧-Kresling折纸结构。
图8
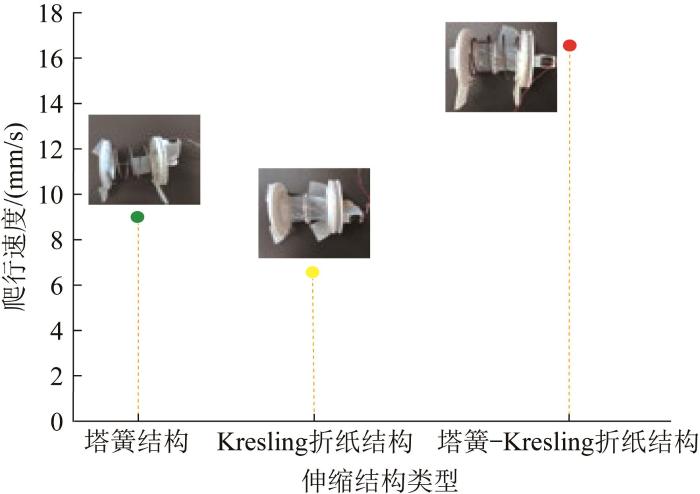
图8
不同伸缩结构下机器人的爬行速度对比
Fig.8
Comparison of robot crawling speed under different telescopic structures
2.1.2 Kresling折纸结构收缩长度对爬行速度的影响
Kresling折纸结构的收缩长度会影响单个爬行周期内机器人的移动距离。为探究Kresling折纸结构的收缩长度对机器人爬行速度的影响,取收缩长度分别为4,6,8,10,12 mm(对应的电机转动时间分别为32,48,64,80,96 ms)开展实验对比,电机停转时间设为200,300,400 ms三种情况,电机转速为200 r/min,Kresling折纸结构的材质、角度参数及塔簧刚度等条件均保持一致。实验管道内径为96 mm,爬行时间设为20T(单个爬行周期T为电机转动与停转时间之和),不同电机工作参数下机器人的爬行速度如图9所示。
图9
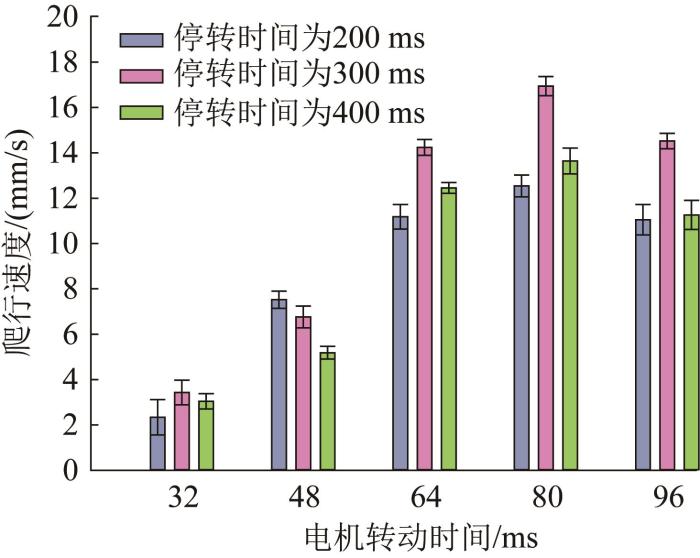
图9
不同电机工作参数下机器人的爬行速度对比
Fig.9
Comparison of robot crawling speed under different motor working parameters
由图9可知,当电机单次转动时间为80 ms、停转时间为300 ms时,机器人的爬行速度最大,为16.94 mm/s;当电机停转时间一定时,随着电机转动时间的增大,机器人的爬行速度呈先增大后减小的变化趋势。结果表明,在一定范围内,增加Kresling折纸结构的收缩长度可增大机器人整体的移动距离,从而提升爬行速度。此外,从图9中还可以看出,当电机转动时间一定时,适当增加停转时间也可以提升机器人的爬行速度,原因是随着电机停转时间的增加,Kresling折纸结构的伸展长度增大,使得机器人的移动距离增大。因此,选择合理的电机转动、停转时间有利于提高机器人的爬行速度。本文选定的电机工作参数为:转速为200 r/min、单次转动时间为80 ms、停转时间为300 ms。
2.1.3 Kresling折纸结构材质对爬行速度的影响
不同材质的Kresling折纸结构的刚度不同,刚度较低的折纸结构易收缩,但也可能会伸展较慢,花费更多的时间。为探究不同材质的Kresling折纸结构对机器人爬行速度的影响,在相同的Kresling折纸结构角度参数、塔簧刚度、电机工作参数条件下,选用厚度均为2 mm的聚丙烯塑料、聚酯塑料和普通A4纸开展实验对比。在3种材质中,聚丙烯塑料的刚度最大,普通A4纸的刚度最小。采用不同材质Kresling折纸结构的机器人的爬行速度如图10所示。结果显示:采用聚丙烯塑料的机器人的爬行速度较采用其他2种材质的快,原因是聚酯塑料和普通A4纸相对于聚丙烯塑料较软。因此,在一定范围内,提高Kresling折纸结构的刚度可以提高机器人的爬行速度,故本文选用聚丙烯塑料。
图10

图10
不同Kresling折纸结构材质下机器人的爬行速度对比
Fig.10
Comparison of robot crawling speed under different Kresling origami structure materials
2.1.4 Kresling折纸结构角度参数对爬行速度的影响
Kresling折纸结构的角度参数会影响机器人的伸展时间,从而对爬行速度造成影响。为探究不同的Kresling折纸结构角度参数对机器人爬行速度的影响,选择5组不同的角度参数开展实验对比。图11(a)所示为高度、材质相同的Kresling折纸结构的具体角度参数,其中:α、β、γ为对应折痕相对于基准线的夹角。通过实验测得Kresling折纸结构角度参数不同时机器人的爬行速度(其他条件均保持一致),如图11(b)所示。结果显示:随着γ的增大,机器人的爬行速度呈先增大后减小的趋势;当γ=100°和γ=110°时,机器人的爬行速度接近,分别为16.94 mm/s和16.01 mm/s,且均大于其他3种γ条件下的爬行速度。出现上述现象的原因是Kresling折纸结构具有双稳态特性。Kresling折纸结构的第1个稳定平衡状态为初始状态,当受到尼龙线拉力作用后,折纸结构收缩到达第2个稳定平衡状态,并利用塔簧的弹力恢复到第1个稳定平衡状态。具有双稳态特性的Kresling折纸结构在收缩、伸展过程中会加快能量的转化,从而提高机器人的爬行速度。
图11
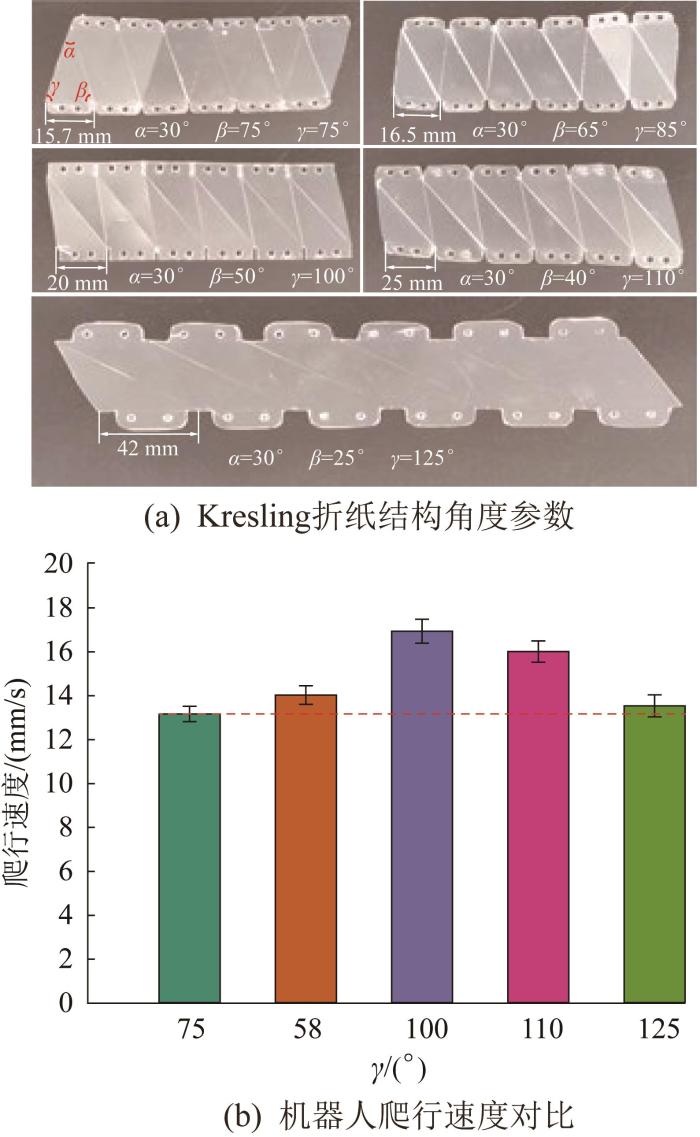
图11
不同Kresling折纸结构角度参数下机器人的爬行速度对比
Fig.11
Comparison of robot crawling speed under different Kresling origami structure angle parameters
图12
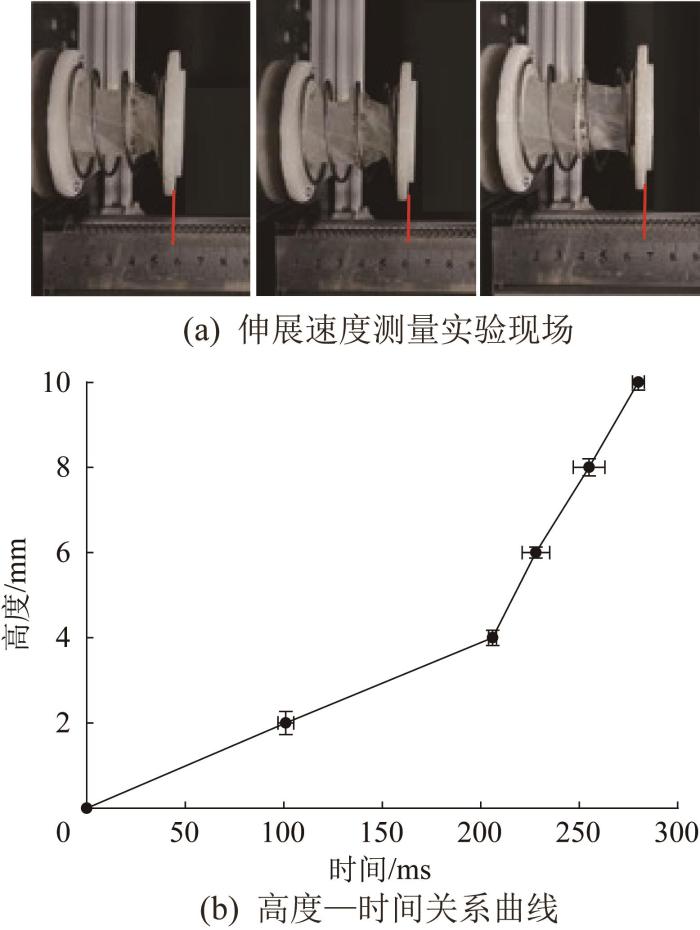
图12
塔簧-Kresling折纸结构伸展速度测量实验结果
Fig.12
Experimental results of stretching speed measurement for tower spring-Kresling origami structure
对图11(a)所示的5组Kresling折纸结构进行测试,结果表明:仅γ=100°和γ=110°条件下的Kresling折纸结构具有双稳态特性。由此可知,要提高机器人的爬行速度也可从改变Kresling折纸结构的角度参数方面考虑。本文最终选定的Kresling折纸结构角度参数为:α=30°、β=50°、γ=100°。
2.1.5 摩擦带带型对爬行速度的影响
软体管道机器人的摩擦结构采用被动摩擦方式,故无须单独计算锚定时间,但硅胶摩擦带的锚定能力会影响伸缩结构的伸缩变化量。在前端摩擦带锚定能力不足的情况下,尼龙线收紧时会出现前端摩擦带后移的现象,从而影响机器人的移动距离。合适的摩擦力有利于提高机器人的爬行速度。
图13(a)所示为实验选用的3种摩擦带带型,分别为斜纹带、凸点带及平面带,这3种带型的尺寸(长
图13
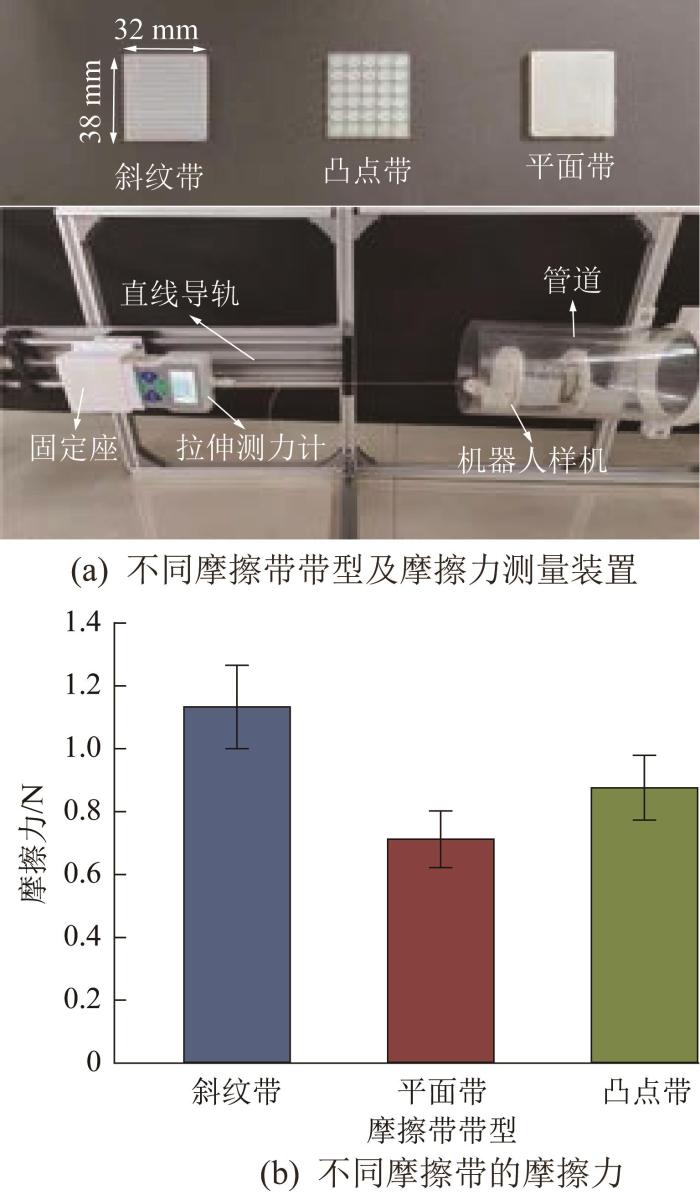
图13
摩擦带的摩擦力测量装置及结果
Fig.13
Measurement device and results for friction force of friction belt
图14
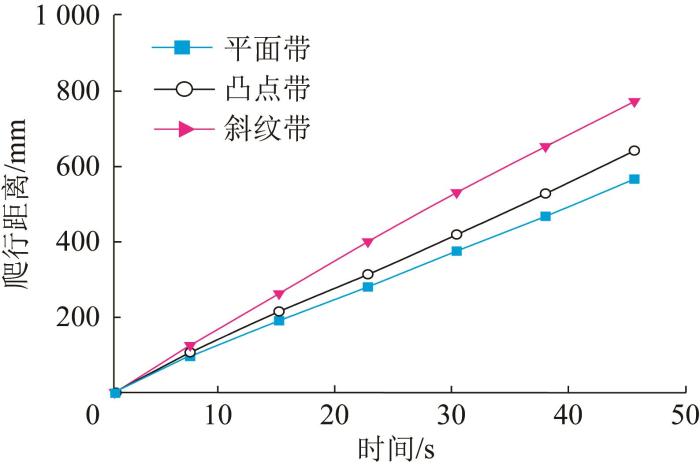
图14
摩擦带带型对机器人爬行距离的影响
Fig.14
Influence of friction belt type on robot crawling distance
2.1.6 摩擦带斜纹角度对爬行速度的影响
图15
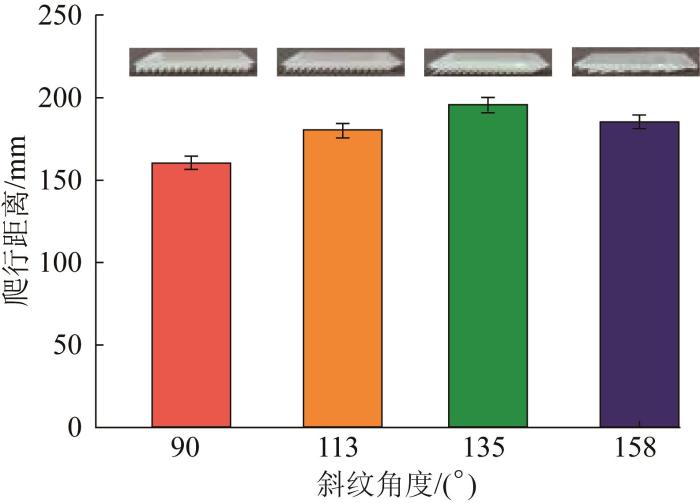
图15
摩擦带斜纹角度对机器人爬行距离的影响
Fig.15
Influence of friction belt twill angle on robot crawling distance
2.2 机器人负载能力分析
软体管道机器人经常要承担勘察、监测任务,具备良好负载能力的机器人更能有效完成任务。机器人自身质量为136.15 g,在内径为96 mm的管道中开展机器人负载能力测试实验,将不同质量的砝码通过尼龙线与机器人尾部相连,并记录30 s内机器人的爬行距离。机器人在不同负载下(分别为100,300,500,800 g)的爬行效果如图16(a)所示,对应的爬行距离如图16(b)所示。由图16可知,随着负载质量的逐渐增大,机器人的爬行速度下降。当负载质量为100 g时,机器人的爬行速度最快,达到12.04 mm/s;当负载质量为800 g时,摩擦带打滑现象比较明显,机器人的爬行速度较慢,仅为2.88 mm/s。当继续加大负载质量时,会出现机器人拉不动砝码的现象,这是因为负载超出了实验电机的最大扭矩。负载能力测试实验结果表明,所设计的机器人具备良好的负载能力,其最大负载为800 g,约为自身质量的5.9倍。
图16

3 不同环境下软体管道机器人爬行展示
3.1 水平管道爬行实验
图17
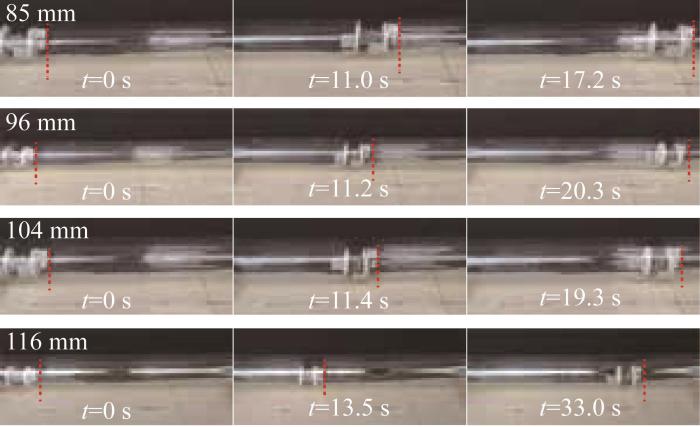
图17
不同内径水平管道中机器人的爬行效果
Fig.17
Robot crawling effect in horizontal pipelines with different inner diameters
图18
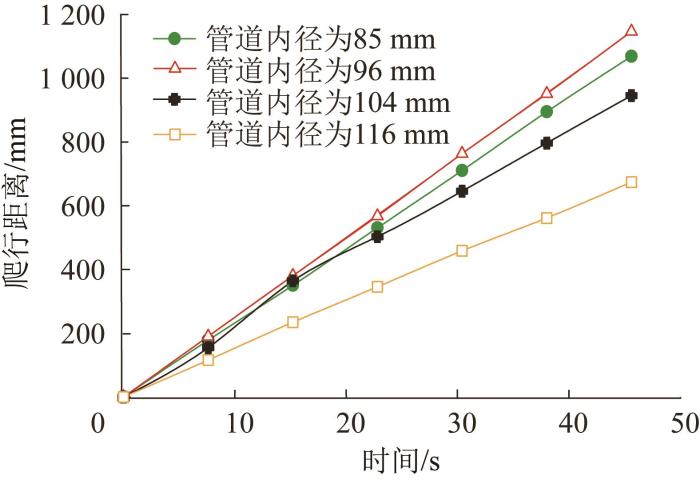
图18
不同内径水平管道中机器人的爬行距离对比
Fig.18
Comparison of crawling distance of robot in horizontal pipelines with different inner diameters
3.2 倾斜管道爬行实验
图19
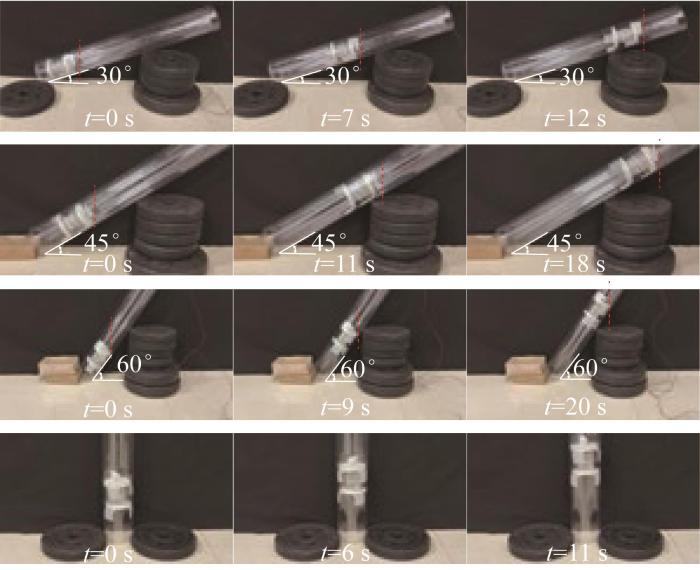
图19
不同倾斜角度管道中机器人的爬行效果
Fig.19
Robot crawling effect in pipelines with different inclined angles
图20
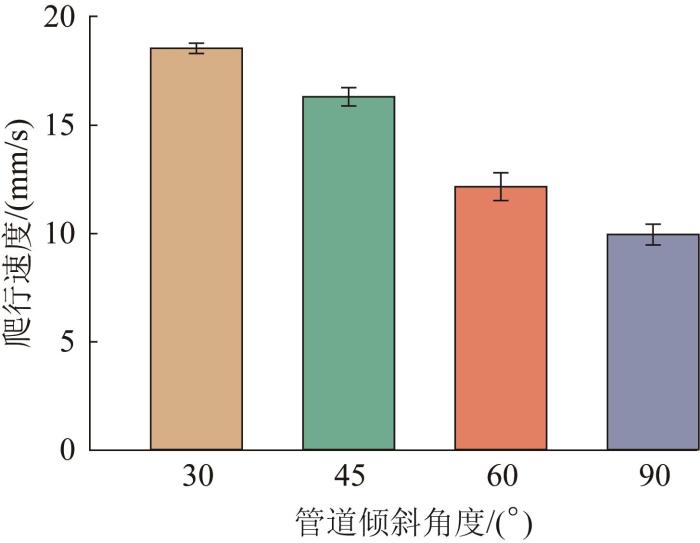
图20
不同倾斜角度管道中机器人的爬行速度对比
Fig.20
Comparison of crawling speed of robot in pipelines with different inclined angles
3.3 非圆形管道爬行实验
圆形是最为常见的管道形状,但特殊环境中通常为其他形状的管道。为了展示所设计的机器人对非圆形管道的适应性,选择矩形和三角形管道开展爬行实验,爬行效果如图21所示。结果显示:在宽度为80 mm的矩形管道中,机器人在15.2 s内的移动距离为292 mm,爬行速度为19.21 mm/s。在边长为132 mm的等边三角形管道中,机器人在31 s内的移动距离为344 mm,爬行速度为11.10 mm/s。在三角形管道中,摩擦带与倾斜的管道内壁有良好的接触,但与矩形管道的接触面积较小,所能提供的有效摩擦力较小,故机器人的爬行速度相对较慢。实验结果表明,所设计的机器人对不同形状的管道具有良好的适应性。
图21
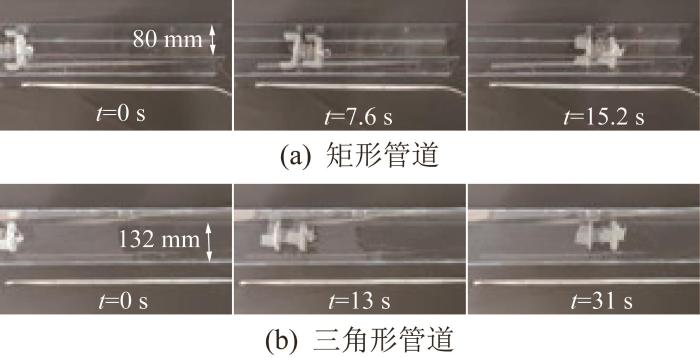
图21
不同形状管道中机器人的爬行效果
Fig.21
Robot crawling effect in pipelines with different shapes
3.4 弯曲管道爬行实验
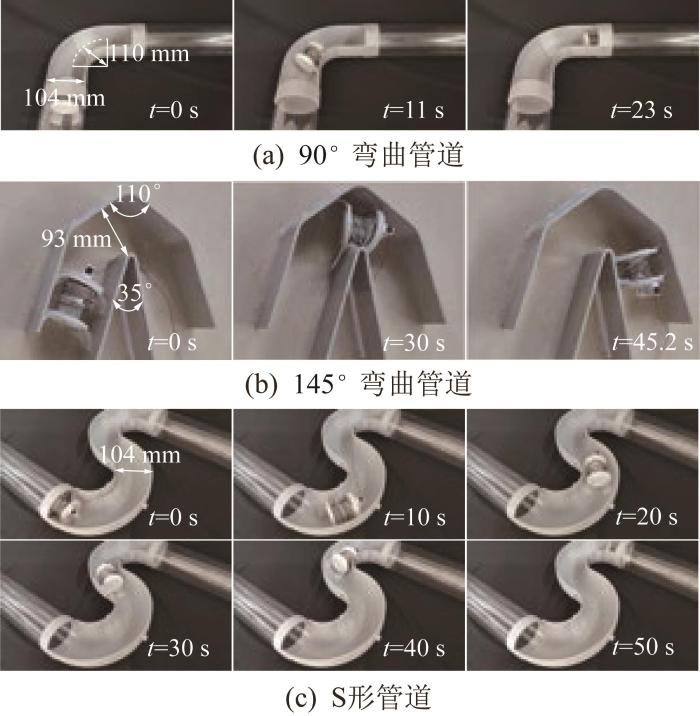
为验证机器人对弯曲管道的适应性,在内径为104 mm的3种弯曲管道中开展爬行实验,结果如图22所示。图22(a)所示为机器人在90°弯曲管道中的爬行效果,其爬行距离约为392.5 mm,通过管道的时间为23 s,爬行速度约为17.06 mm/s。虽然该机器人不能主动弯曲变形,但Kresling折纸结构可以折展变形,故机器人能以被动柔顺形式适应弯曲管道。图22(b)所示为机器人通过145°弯曲管道的爬行效果,爬行距离约为441.5 mm,通过管道的时间为45.2 s,爬行速度约为9.77 mm/s。图20(c)所示为机器人在S形管道中的爬行效果,爬行距离为753.6 mm,通过S形管道的时间为50 s,爬行速度约为15.07 mm/s。结果表明,所设计的机器人具有良好的复杂管道适应性。
图22
4 结 论
针对传统刚性管道机器人体积大、适应性差等不足,设计了一种基于Kresling折纸结构的软体管道机器人。该机器人以塔簧-Kresling折纸结构作为伸缩结构,用于实现轴向移动;以4条硅胶摩擦带作为摩擦结构,用于提供摩擦力。同时,制作了机器人样机并开展了爬行实验,验证了机器人结构设计的可行性。通过不同的爬行实验分析了伸缩结构类型,Kresling折纸结构的收缩长度、材质与角度参数以及摩擦力等对机器人爬行速度的影响。机器人最大负载为自身质量的5.9倍,良好的负载能力有助于机器人完成多种任务。通过实验测得,所设计的机器人的最大水平爬行速度为25.14 mm/s,垂直爬行速度可达9.96 mm/s;该机器人对内径、倾斜角度、形状不同的管道以及弯曲管道均具有良好的适应性,且能依靠被动柔顺性灵活通过水平直角弯道及复杂的S形管道,这可为管道探测、检修等应用提供新颖的方式。
参考文献
国外石油天然气行业非金属管道检测技术
[J].
Detection technologies of non-metallic pipelines in oil and gas industry at abroad
[J].
具有织物皮肤的仿蠕虫气动式管道机器人设计及应用研究
[D].
Design and application of worm-inspired pnuematic pipe robot with fabric skin
[D].DOI:10.1177/00405175211016561 [本文引用: 1]
圆形管道中机器人控制策略研究及管道变形率的测量
[D].
The control law of the wheel robot and the measurement of pipeline deformation
[D].
Dadu-RBD: robot rigid body dynamics accelerator with multifunctional pipelines
[C]//Proceedings of the 56th Annual IEEE/ACM International Symposium on Microarchitecture.
A review: technological trends and development direction of pipeline robot systems
[J].
Tracked locomotion systems for ground mobile robots: a review
[J].
Machine learning best practices for soft robot proprioception
[C]//
折纸机器人
[J].
Origami robots
[J].DOI:10.1360/n092018-00213 [本文引用: 1]
A review of origami applications in mechanical engineering
[J].
Origami-inspired soft-rigid hybrid contraction actuator and its application in pipe-crawling robot
[J].
Bistable behavior of the cylindrical origami structure with Kresling pattern
[J].
Harnessing the multistability of Kresling origami for reconfigurable articulation in soft robotic arms
[J].
Soft robotic origami crawler
[J].
Mori: a modular origami robot
[J].
Worm-inspired soft robots enable adaptable pipeline and tunnel inspection
[J].
Single-actuator soft robot for in-pipe crawling
[J].
Bioinspired locomotion and grasping in water: the soft eight-arm OCTOPUS robot
[J].
Passive morphological adaptation for obstacle avoidance in a self-growing robot produced by additive manufacturing
[J].
How the Venus flytrap snaps
[J].
农业机器人技术研究进展
[J].
Research progress of agricultural robot technology
[J].
Air-releasable soft robots for explosive ordnance disposal
[C]//
The growing use of robots by the aerospace industry
[J].
A novel rescue robot: hybrid soft and rigid structures for narrow space searching
[C]//

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}