基于Kresling折纸结构的软体管道机器人设计
Design of soft pipeline robot based on Kresling origami structure
基于Kresling折纸结构的软体管道机器人设计 |
| 韩伟涛,温涛,刘磊,胡俊峰 |
|
Design of soft pipeline robot based on Kresling origami structure |
| Weitao HAN,Tao WEN,Lei LIU,Junfeng HU |
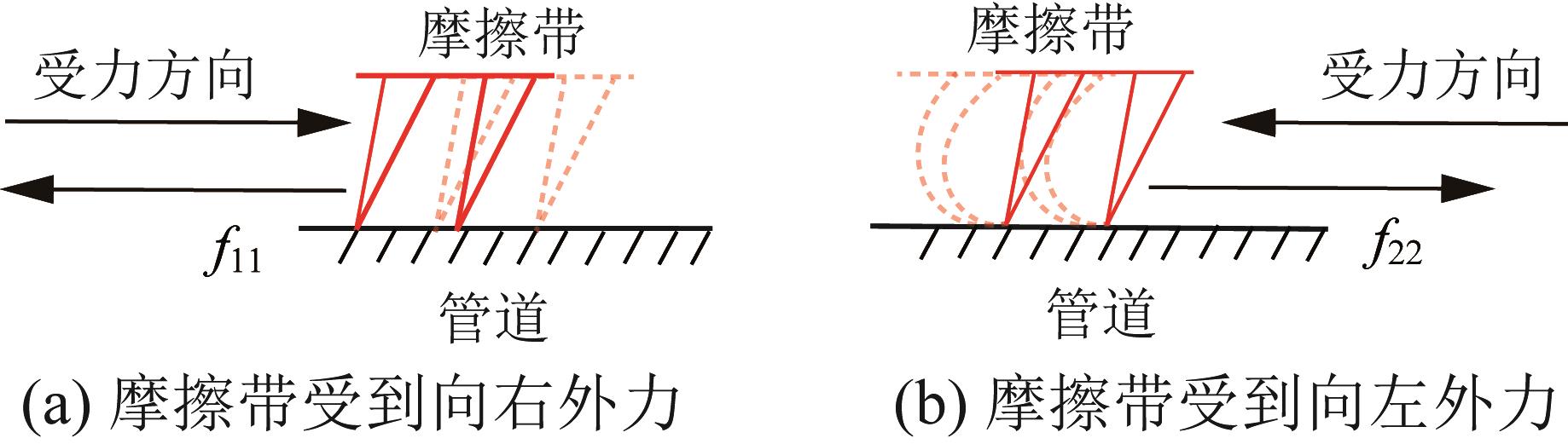
| 图4 机器人爬行过程中的摩擦原理 |
| Fig.4 Friction principle of robot during crawling process |
|
|