| Modeling, Simulation, Analysis and Decision |
|


|
|
|
| Research on dynamic modeling and motion control of amphibious turtle inspired robot |
Hong-bin RUI( ),Lu-lu LI,Tian-ci WANG,Kai-wen DUAN ),Lu-lu LI,Tian-ci WANG,Kai-wen DUAN |
| College of Mechanical and Precision Instrument Engineering, Xi’an University of Technology, Xi’an 710048, China |
|
|
|
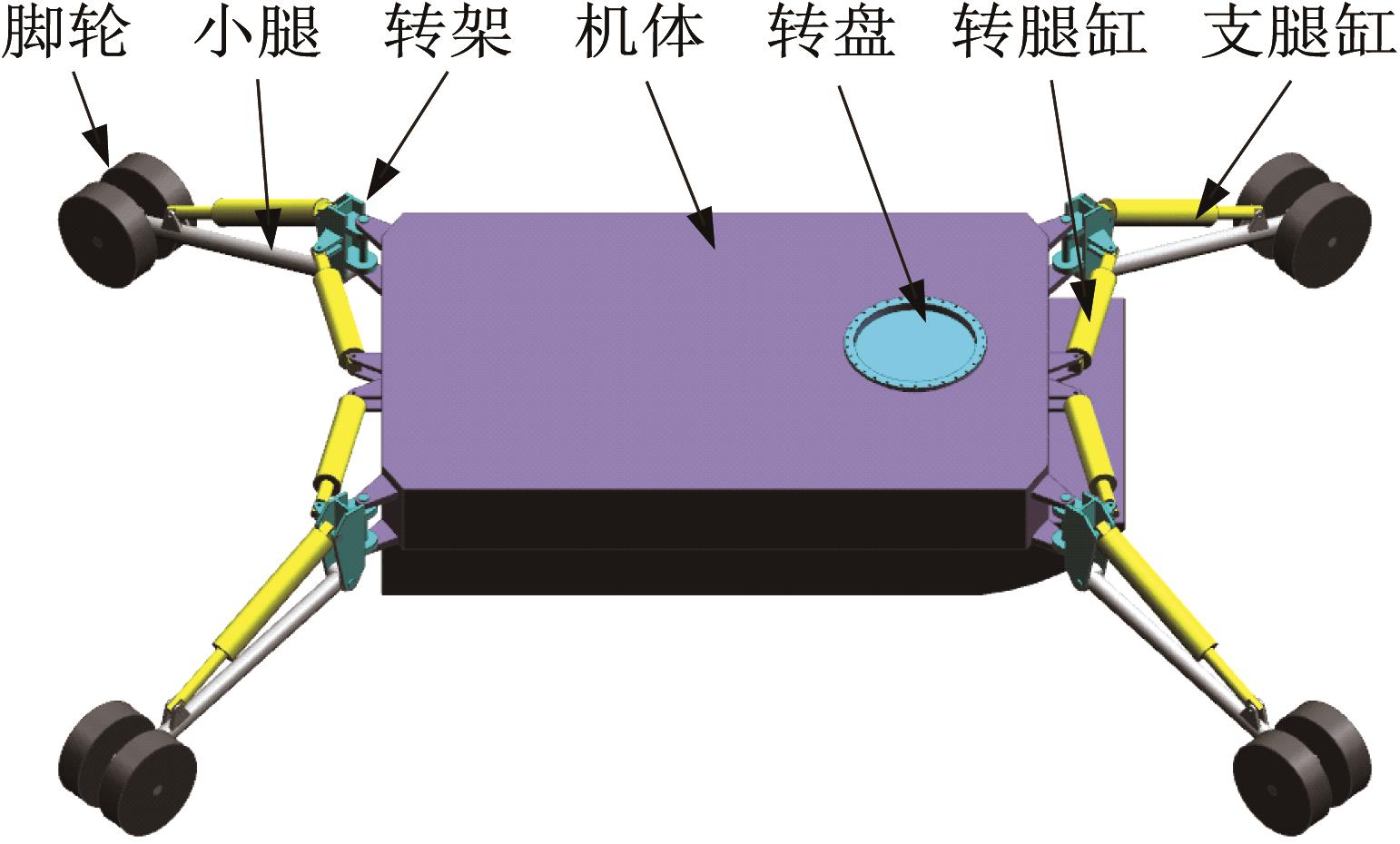
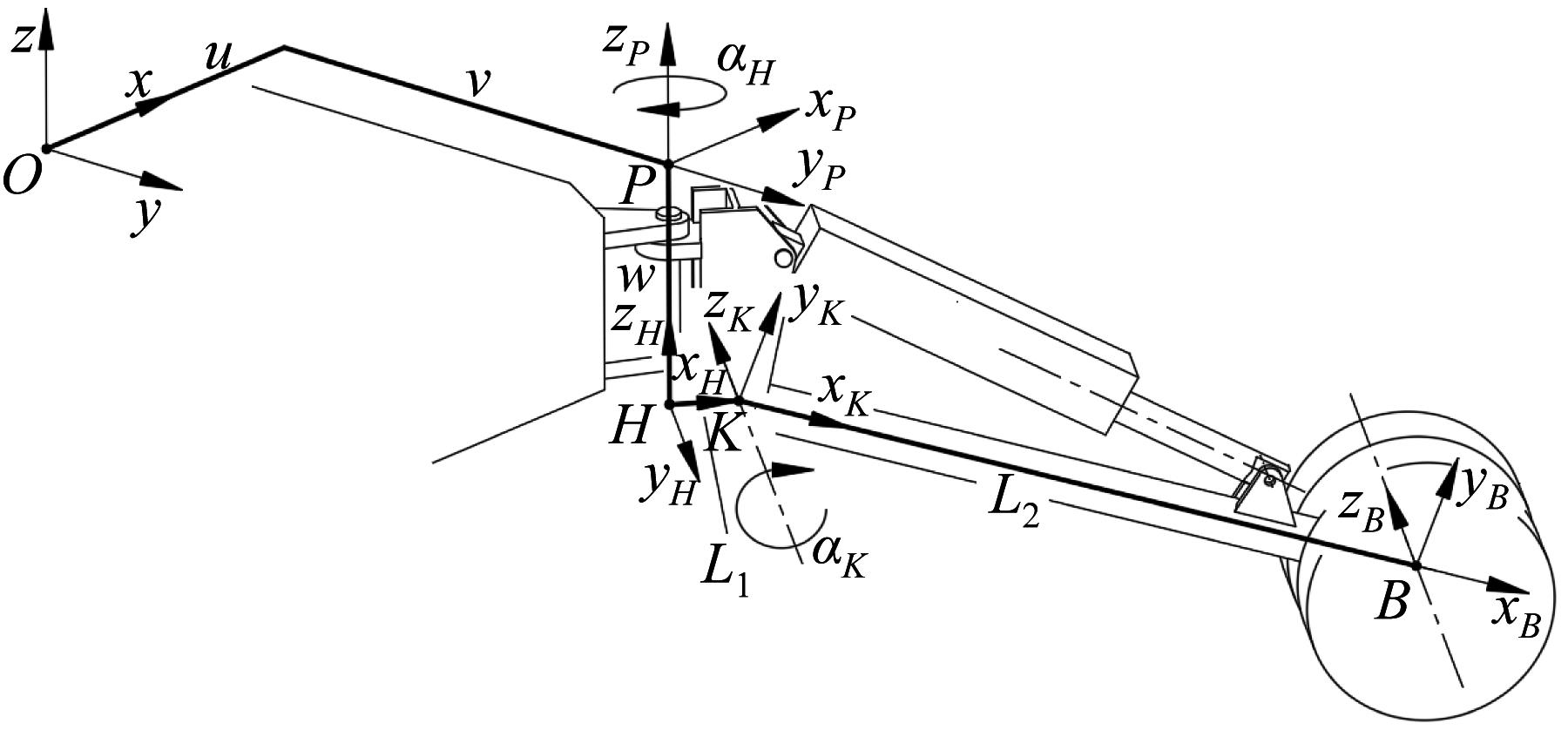
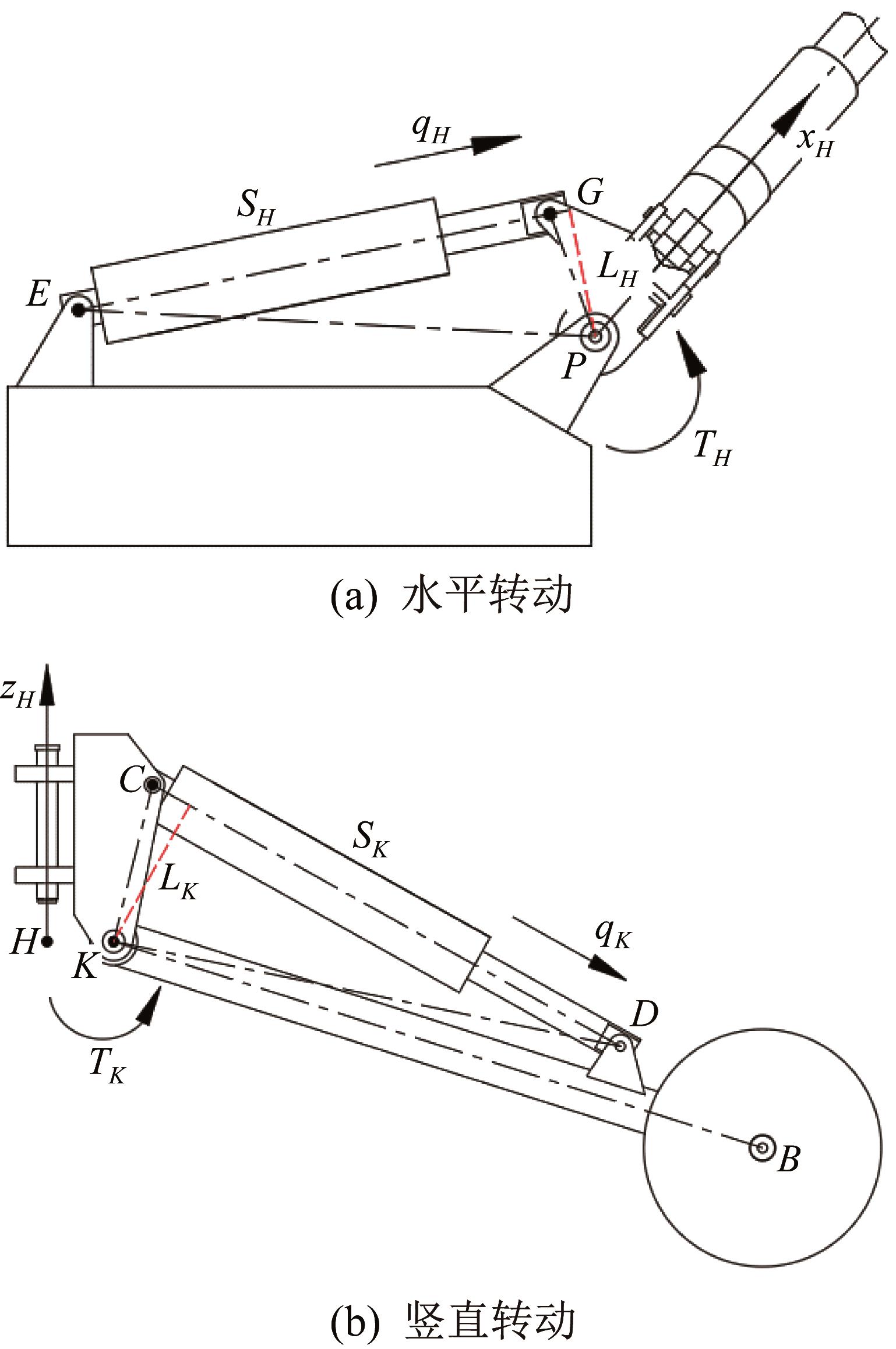
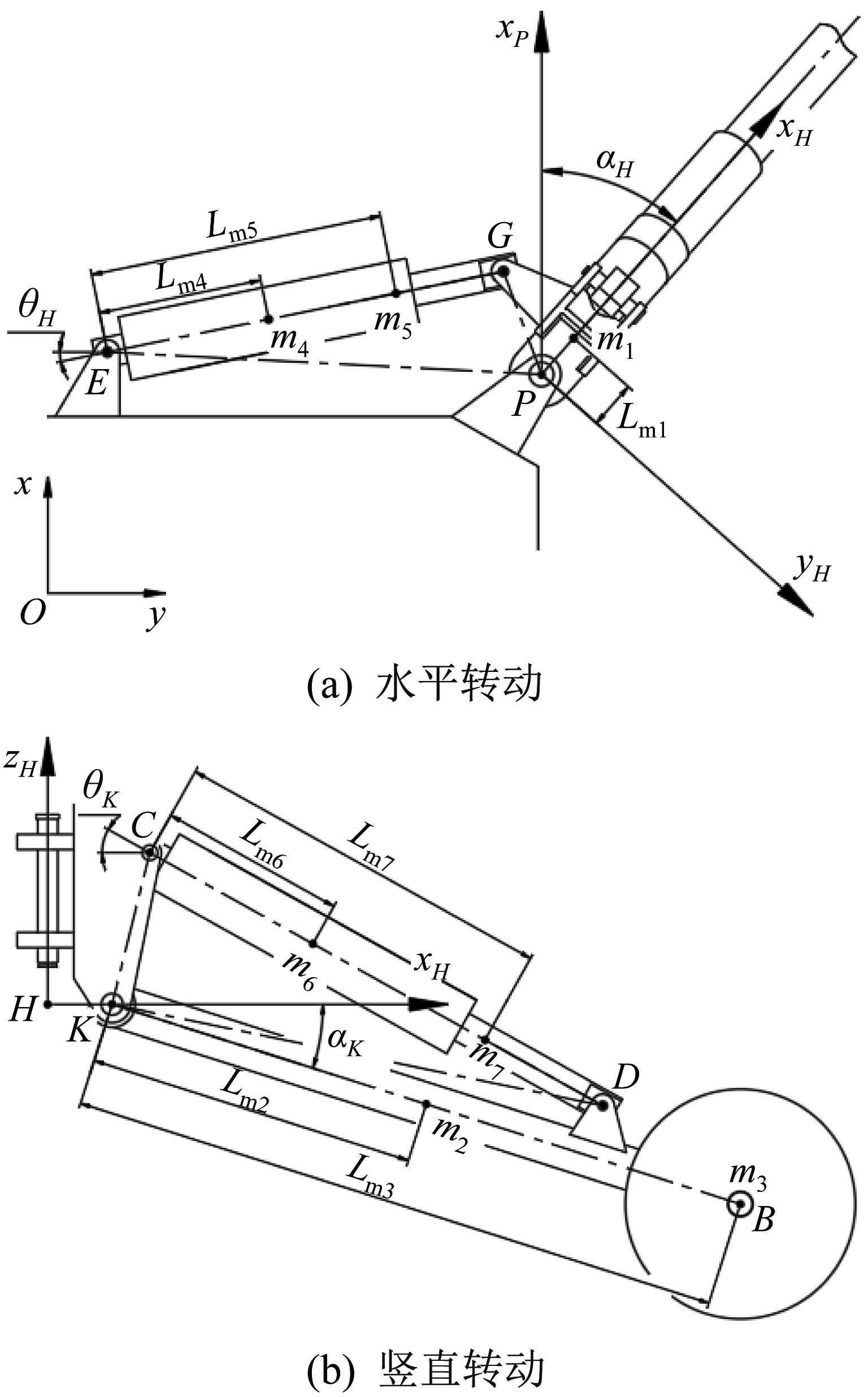
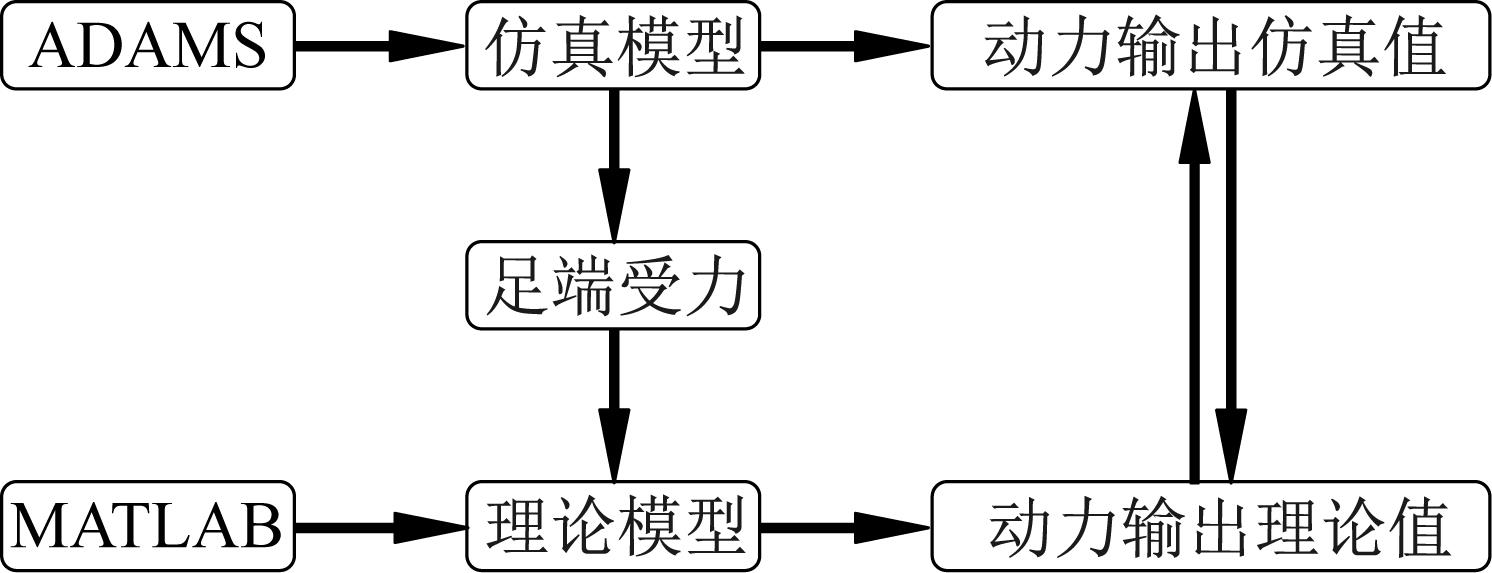
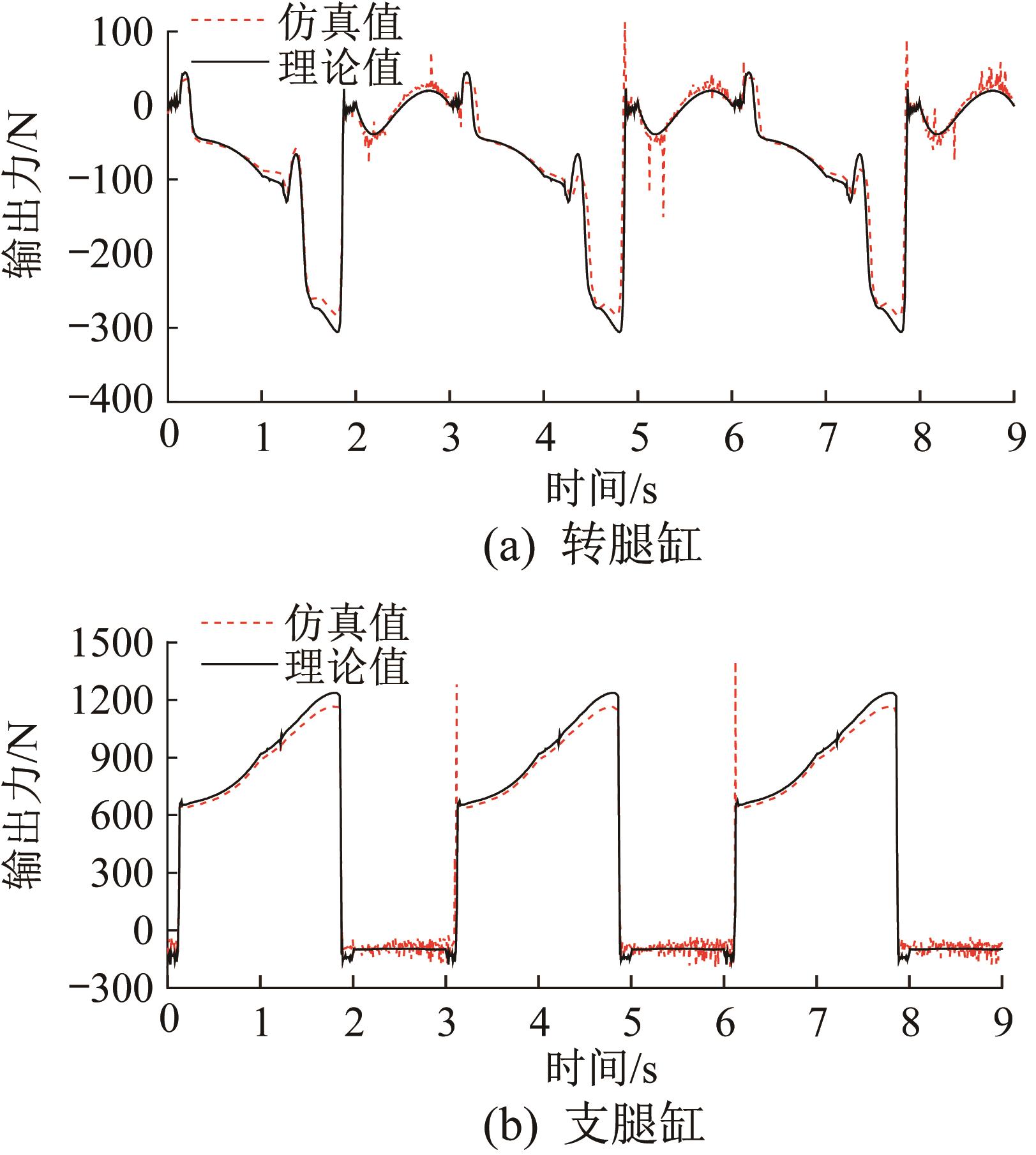
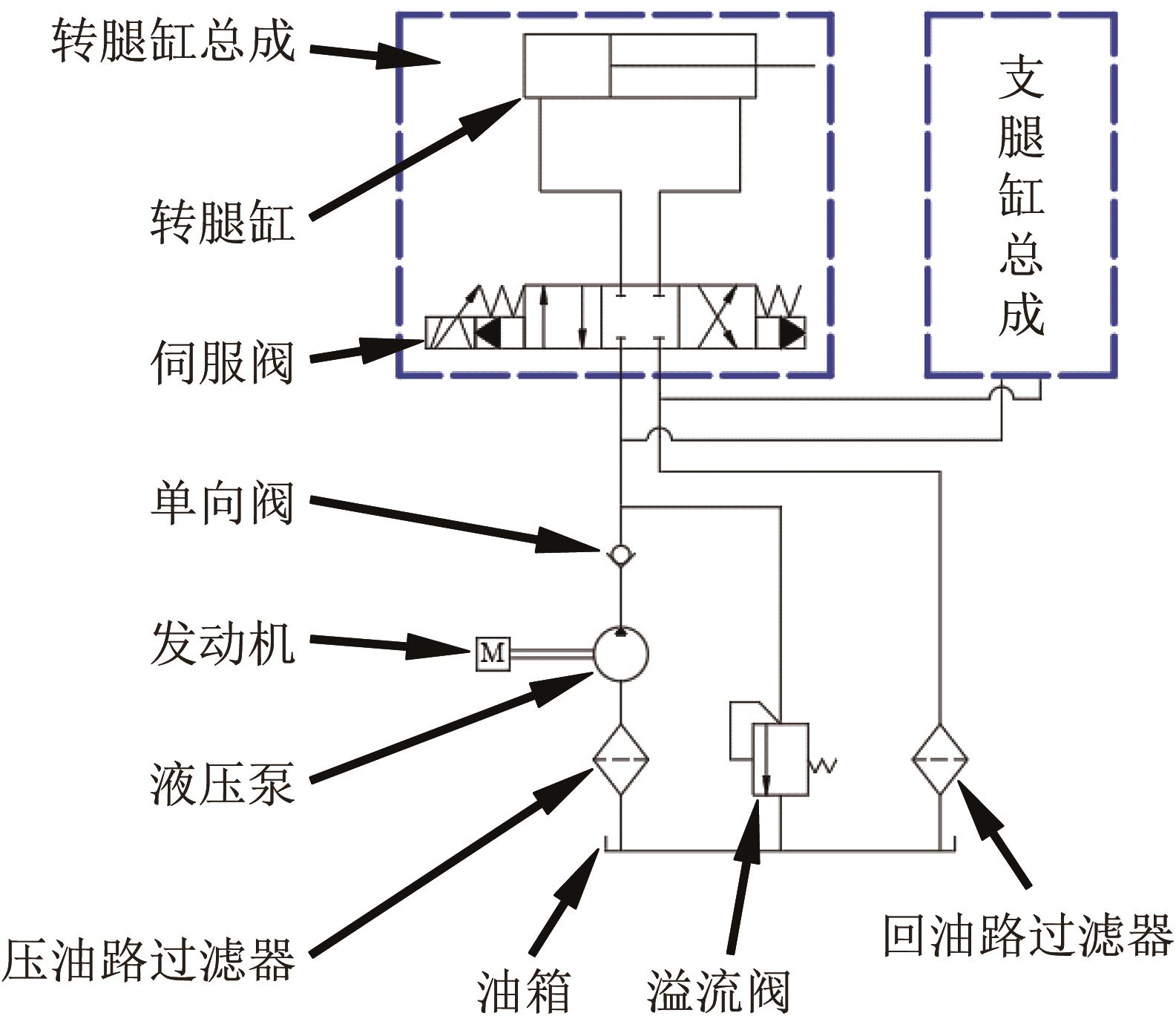
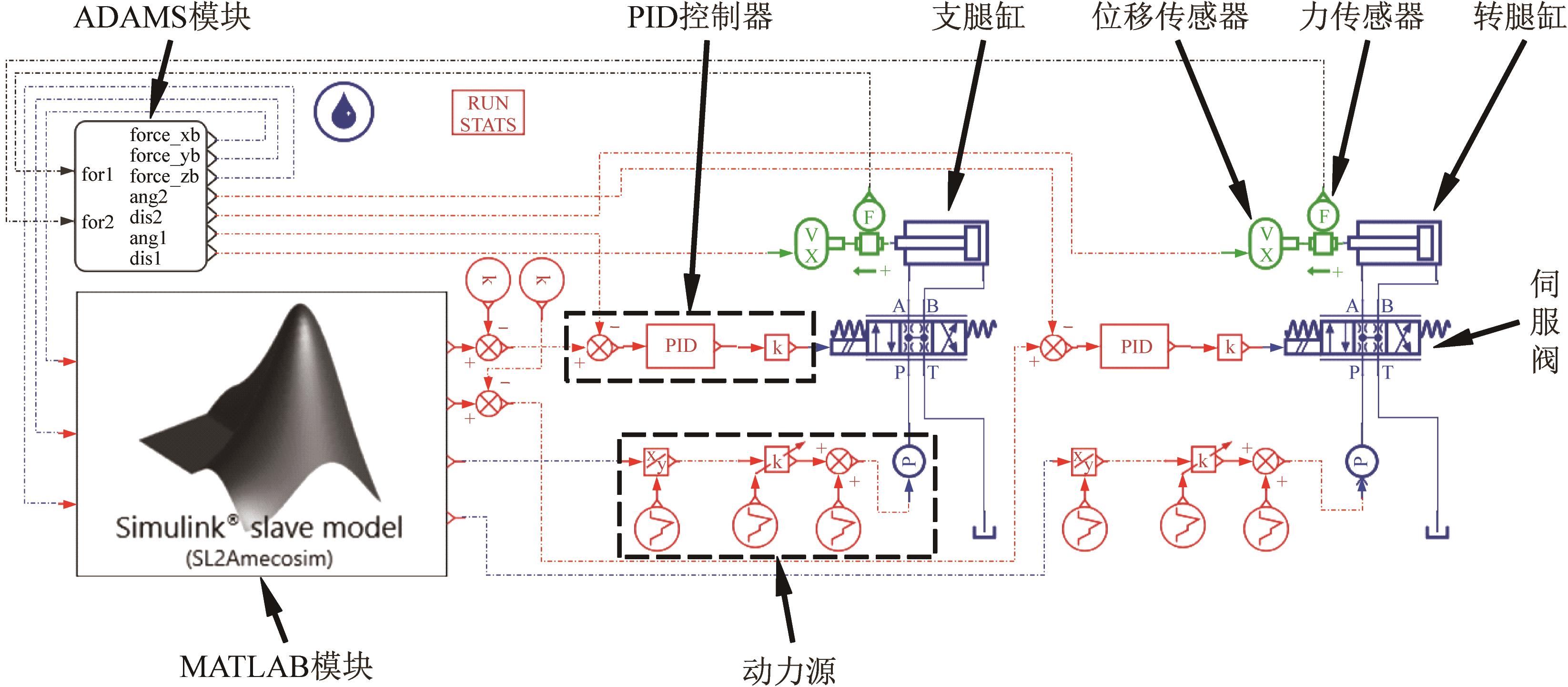
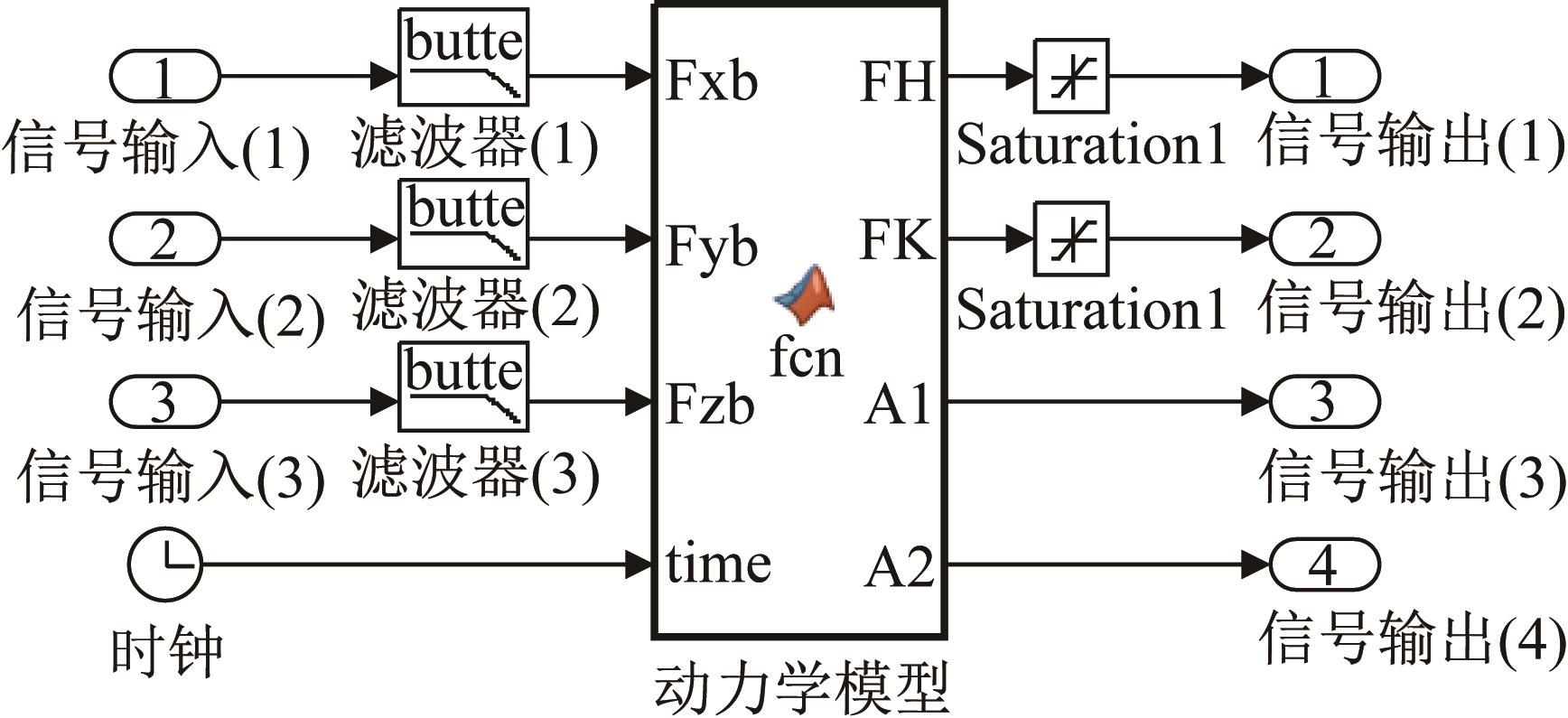
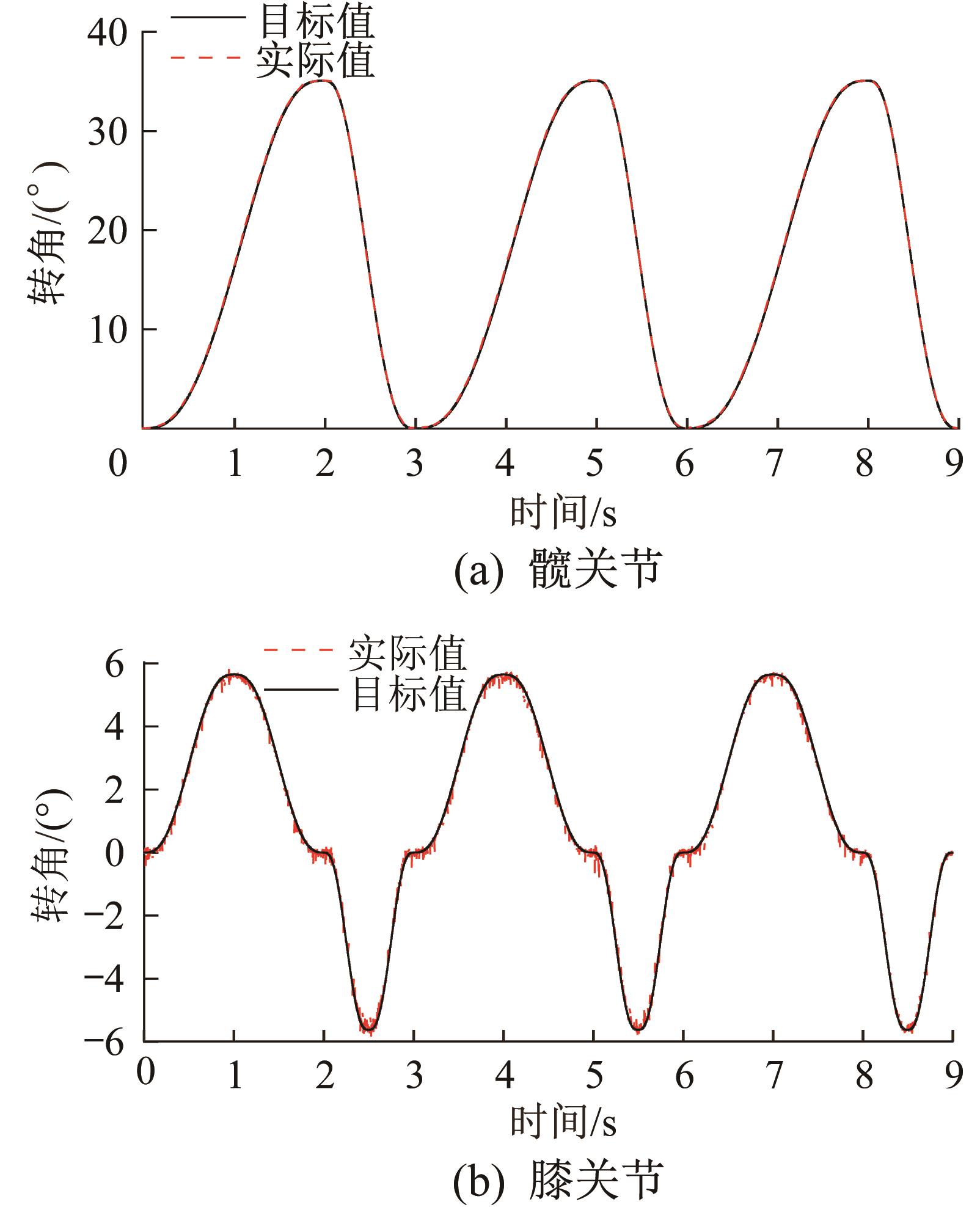
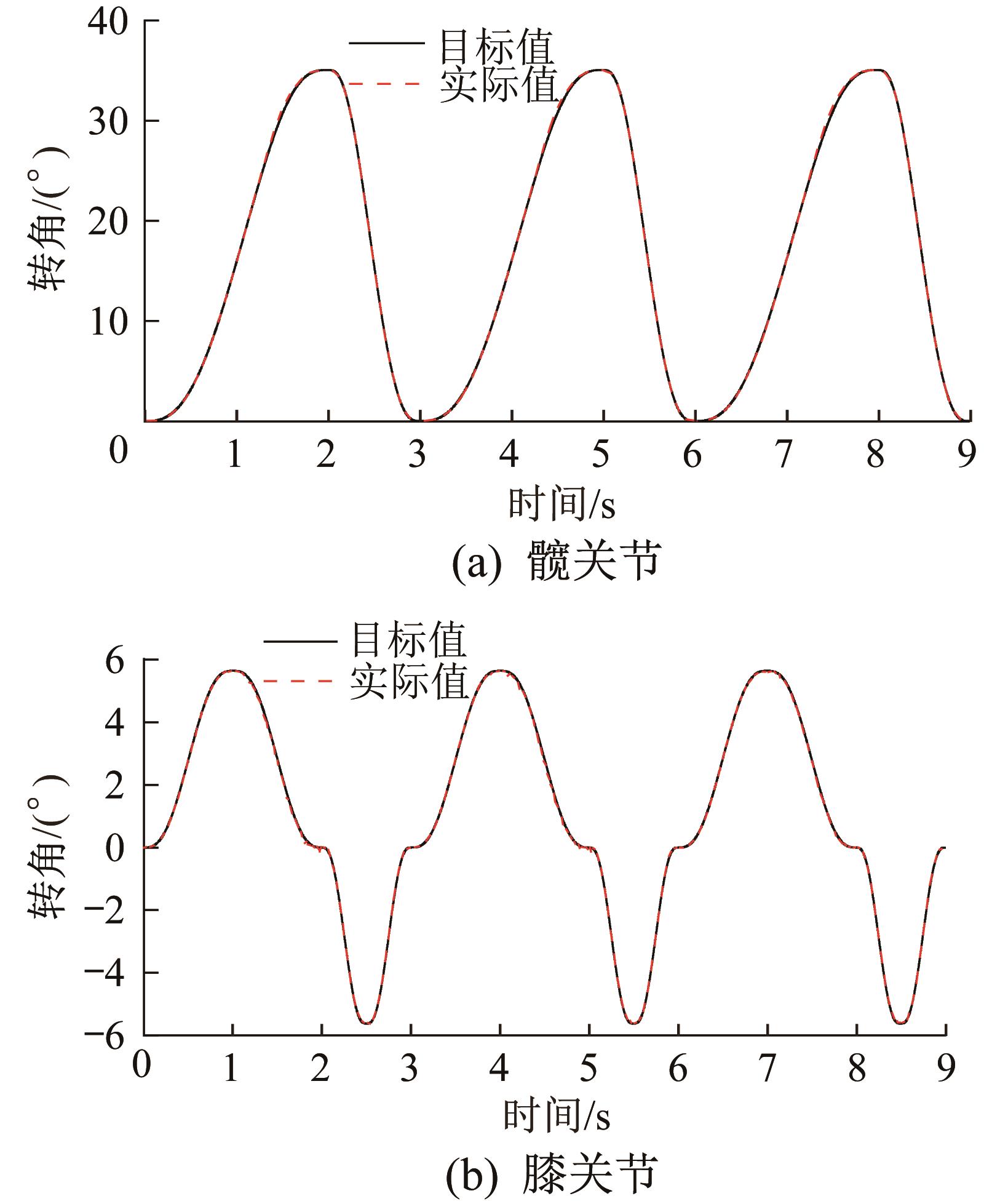
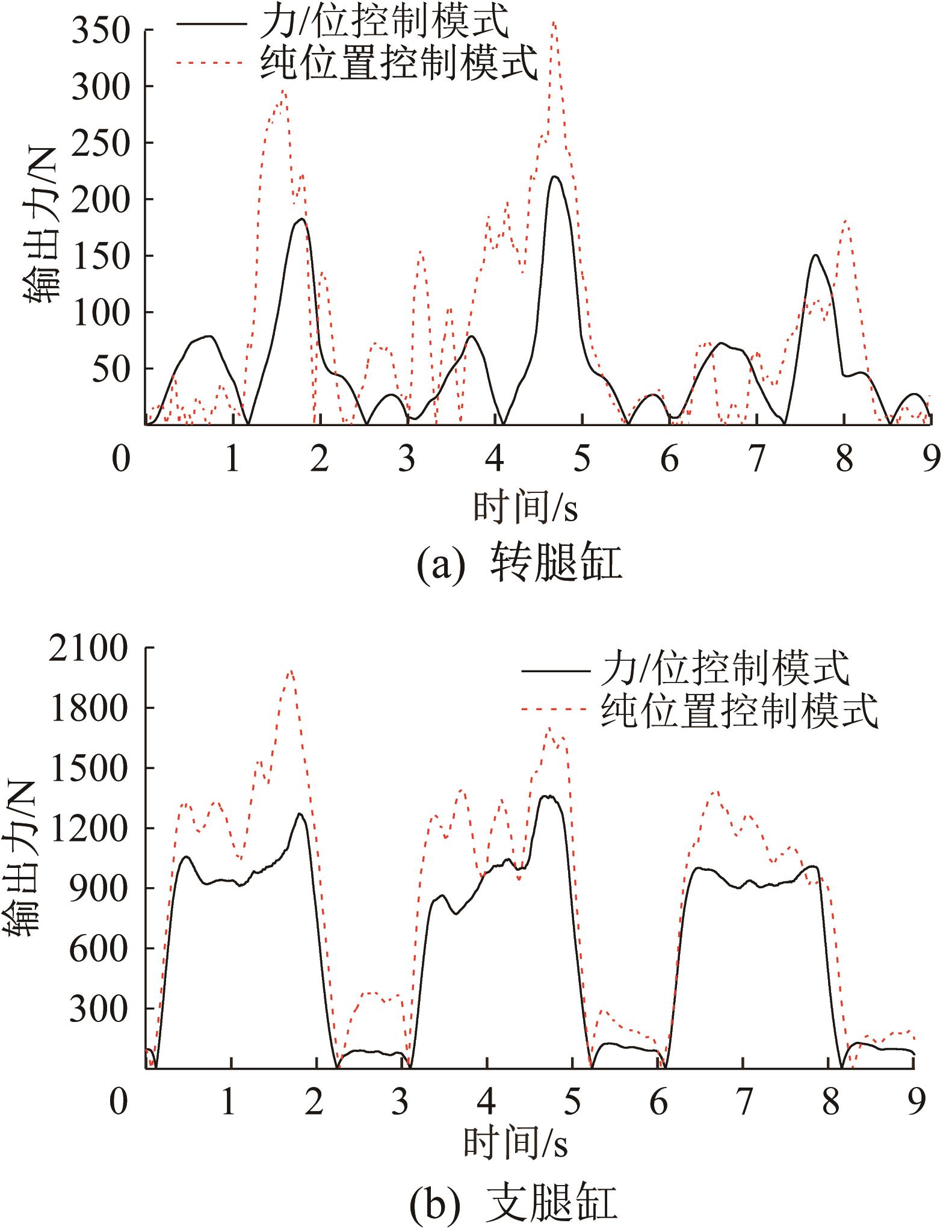
Abstract In order to improve the walking stability of amphibious turtle inspired robot, a dynamics model was established, and a force/position control model was proposed based on the PID (proportional integral derivative) feedback control strategy. Firstly, according to the kinematics model of the robot, the transformation matrix and Jacobian matrix of the outrigger were obtained, and a force transfer model between foot end and hydraulic cylinder was established by the virtual work principle. Then, the Lagrange method was used to model the dynamics of the robot, and the dynamics equation of the outrigger was derived. At the same time, the dynamics simulation was carried out, and the real-time force on the foot end was introduced into the dynamics equation for calculation, which verified the correctness of the dynamics model. Finally, a hydraulic simulation model was built, and the robot motion simulation was carried out in the ADAMS?AMESim?MATLAB co-simulation environment. The simulation results showed that compared with the pure position control mode, the rotation of the robot knee joint under the force/position control mode was more stable, and the power output of the hydraulic cylinder was more stable and the power consumption was less. The research results have reference significance for improving the stability of robot motion, enhancing the robustness of motion control system and improving the overall efficiency of hydraulic system.
|
|
Received: 17 May 2022
Published: 06 March 2023
|
|
|
两栖仿海龟机器人动力学建模与运动控制研究
为了提高两栖仿海龟机器人行走的稳定性,对其进行动力学建模,并基于PID(proportional integral derivative,比例积分微分)反馈控制策略提出了一种力/位控制模型。首先,根据机器人的运动学模型,得到了支腿的变换矩阵和雅可比矩阵,并利用虚功原理建立了足端与液压缸之间的力传递模型。然后,利用拉格朗日法对机器人进行动力学建模,推导了支腿的动力学方程,同时进行了动力学仿真,并将实时的足端受力导入动力学方程进行计算,验证了动力学模型的正确性。最后,搭建了液压仿真模型,并在ADAMS?AMESim?MATLAB联合仿真环境中开展了机器人运动仿真。仿真结果显示:与纯位置控制模式相比,力/位控制模式下机器人膝关节的转动更加平稳,液压缸的动力输出更稳定且功耗更小。研究结果对提高机器人运动的稳定性、增强运动控制系统的鲁棒性和提高液压系统的总效率具有借鉴意义。
关键词:
机器人,
动力学,
力/位控制,
联合仿真
|
|
| [1] |
牛少杰.河南因水灾遇难 99人[N].天津日报,2021-07-03(7).
NIU Shao-jie. Floods killed 99 people in Henan[N]. Tianjin Daily, 2021-07-03(7).
|
|
|
| [2] |
冯飞. 群策群力 协同推进 加快发展我国应急产业[J]. 中国应急管理,2015(11):58-59.
FENG Fei. Work together to accelerate the development of China’s emergency industry[J]. China Emergency Management, 2015(11): 58-59.
|
|
|
| [3] |
赵海朋,张凌燕.“十四五”时期我国机器人产业发展关键在于做好三个“关键”[J].机器人产业,2022(2):12-16.
ZHAO Hai-peng, ZHANG Ling-yan. The key to the development of China’s robot industry during the “14th Five-year Plan” period lies in doing well in three “keys”[J]. Robot Industry, 2022(2): 12-16.
|
|
|
| [4] |
UEDA K, GUARNIERI M, INOH T, et al. Development of HELIOS IX: an arm-equipped tracked vehicle[J]. Journal of Robotics and Mechatronics, 2011, 23(6): 1031-1040.
|
|
|
| [5] |
YAMAUCHI B M. PackBot: a versatile platform for military robotics[C]//Proceedings Volume 5422, Unmanned Ground Vehicle Technology VI, Orlando, Florida: SPIE, 2004: 228-237.
|
|
|
| [6] |
NEUMANN M, PREDKI T, HECKES L, et al. Snake-like, tracked, mobile robot with active flippers for urban search-and-rescue tasks[J]. Industrial Robot, 2013, 40(3): 246-250.
|
|
|
| [7] |
CASS S. DARPA unveils Atlas DRC robot[EB/OL]. (2013-09-22) [2022-05-17]. .
|
|
|
| [8] |
HUTTER M, GEHRING C, LAUBER A, et al. ANYmal-toward legged robots for harsh environments[J]. Advanced Robotics, 2017, 31(17): 918-931.
|
|
|
| [9] |
JUNG T, LIM J, BAE H, et al. Development of the humanoid disaster response platform DRC-HUBO+[J]. IEEE Transactions on Robotics, 2018, 34(1): 1-17.
|
|
|
| [10] |
SCHWARZ M, RODEHUTSKORS T, DROESCHEL D, et al. NimbRo rescue: solving disaster-response tasks with the mobile manipulation robot Momaro[J]. Journal of Field Robotics, 2017, 34(2): 400-425.
|
|
|
| [11] |
郭冰菁,韩建海,李向攀,等.步态康复机器人动力学李群李代数建模及仿真[J].系统仿真学报,2020,32(6):1126-1135.
GUO Bing-jing, HAN Jian-hai, LI Xiang-pan, et al. Dynamics modeling and simulation of gait rehabilitation robot based on Lie groups and Lie algebras theory[J]. Journal of System Simulation, 2020, 32(6): 1126-1135.
|
|
|
| [12] |
张琦,田梦倩,李伟强,等.复式套索人工肌肉驱动的下肢外骨骼的运动控制[J].机器人,2021,43(2):214-223.
ZHANG Qi, TIAN Meng-qian, LI Wei-qiang, et al. Motion control of a lower-limb exoskeleton actuated by compound tendon-sheath artificial muscles[J]. Robot, 2021, 43(2): 214-223.
|
|
|
| [13] |
宛敏红,周维佳,骆海涛,等.高精度重载搅拌摩擦焊机器人设计与运动控制[J].机器人,2018,40(6):817-824.
WAN Min-hong, ZHOU Wei-jia, LUO Hai-tao, et al. Design and motion control of the high precision heavy load friction stir welding robot[J]. Robot, 2018, 40(6): 817-824.
|
|
|
| [14] |
王学军,张帆.攀爬机器人动力学建模与分析[J/OL].机械科学与技术, (2021-12-20) [2022-05-17]. .
WANG Xue-jun, ZHANG Fan. Dynamic modeling and analysis of climbing robot[J/OL]. Mechanical Science and Technology for Aerospace Engineering, (2021-12-20) [2022-05-17]. .
|
|
|
| [15] |
KOOLEN T, BERTRAND S, THOMAS G, et al. Design of a momentum-based control framework and application to the humanoid robot atlas[J]. International Journal of Humanoid Robotics, 2016, 13(1): 1650007.
|
|
|
| [16] |
芮宏斌,李路路,曹伟.两栖仿海龟机器人步态规划及分析[J/OL].机械科学与技术,(2021-10-21) [2022-05-17]. .
RUI Hong-bin, LI Lu-lu, CAO Wei. Gait planning and analysis of amphibious turtle inspired robot[J/OL]. Mechanical Science and Technology for Aerospace Engineering, (2021-10-21) [2022-05-17]. .
|
|
|
| [17] |
韩清凯,罗忠.机械系统多体动力学分析、控制与仿真[M].北京:科学出版社,2010:8-28.
HAN Qing-kai, LUO Zhong. Multi-body dynamics analysis, control and simulation of mechanical systems[M]. Beijing: Science Press, 2010: 8-28.
|
|
|
| [18] |
王晓磊,金振林,李晓丹,等.串并混联四足仿生机器人动力学建模与分析[J].农业机械学报,2019,50(4):401-412. doi:10.6041/j.issn.1000-1298.2019.04.046
WANG Xiao-lei, JIN Zhen-lin, LI Xiao-dan, et al. Dynamic modeling and analysis of serial-parallel hybrid quadruped bionic robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(4): 401-412.
doi: 10.6041/j.issn.1000-1298.2019.04.046
|
|
|
| [19] |
李加启.高速四足机器人液压支腿动力学分析及运动控制[D].哈尔滨:哈尔滨工业大学,2019:22-61.
LI Jia-qi. Dynamic analysis and motion control of hydraulic leg in high speed quadruped robot[D]. Harbin: Harbin Institute of Technology, 2019: 22-61.
|
|
|
| [20] |
芮宏斌,李路路,曹伟,等.轮‒履‒腿复合仿生机器人步态规划及越障性能分析[J].工程设计学报,2022,29(2):133-142. doi:10.3785/j.issn.1006-754X.2022.00.031
RUI Hong-bin, LI Lu-lu, CAO Wei, et al. Gait planning and obstacle-surmounting performance analysis of wheel-track-leg composite bionic robot[J]. Chinese Journal of Engineering Design, 2022, 29(2): 133-142.
doi: 10.3785/j.issn.1006-754X.2022.00.031
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|