| 机器人与机构设计 |
|


|
|
|
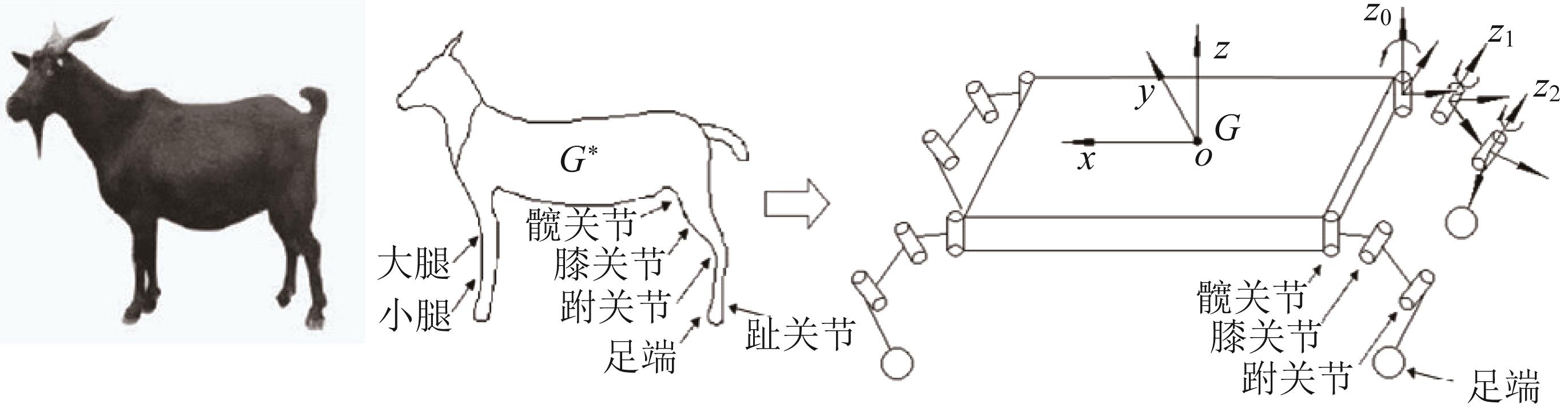
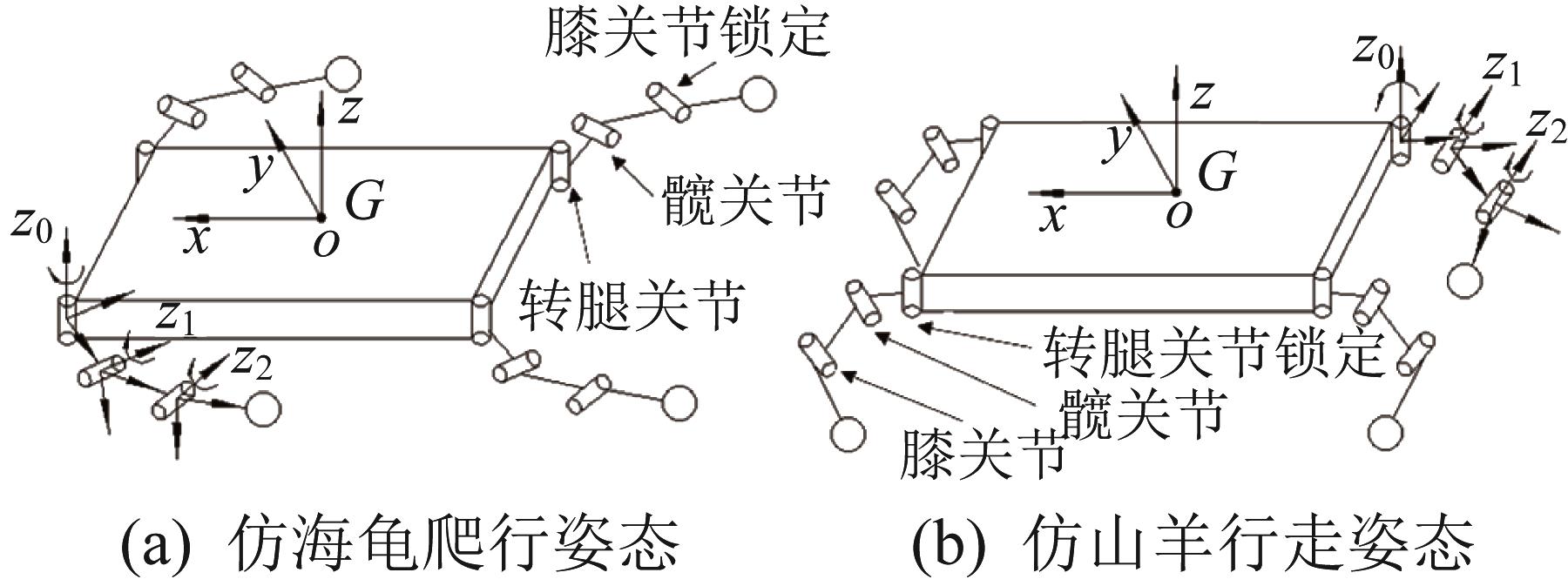
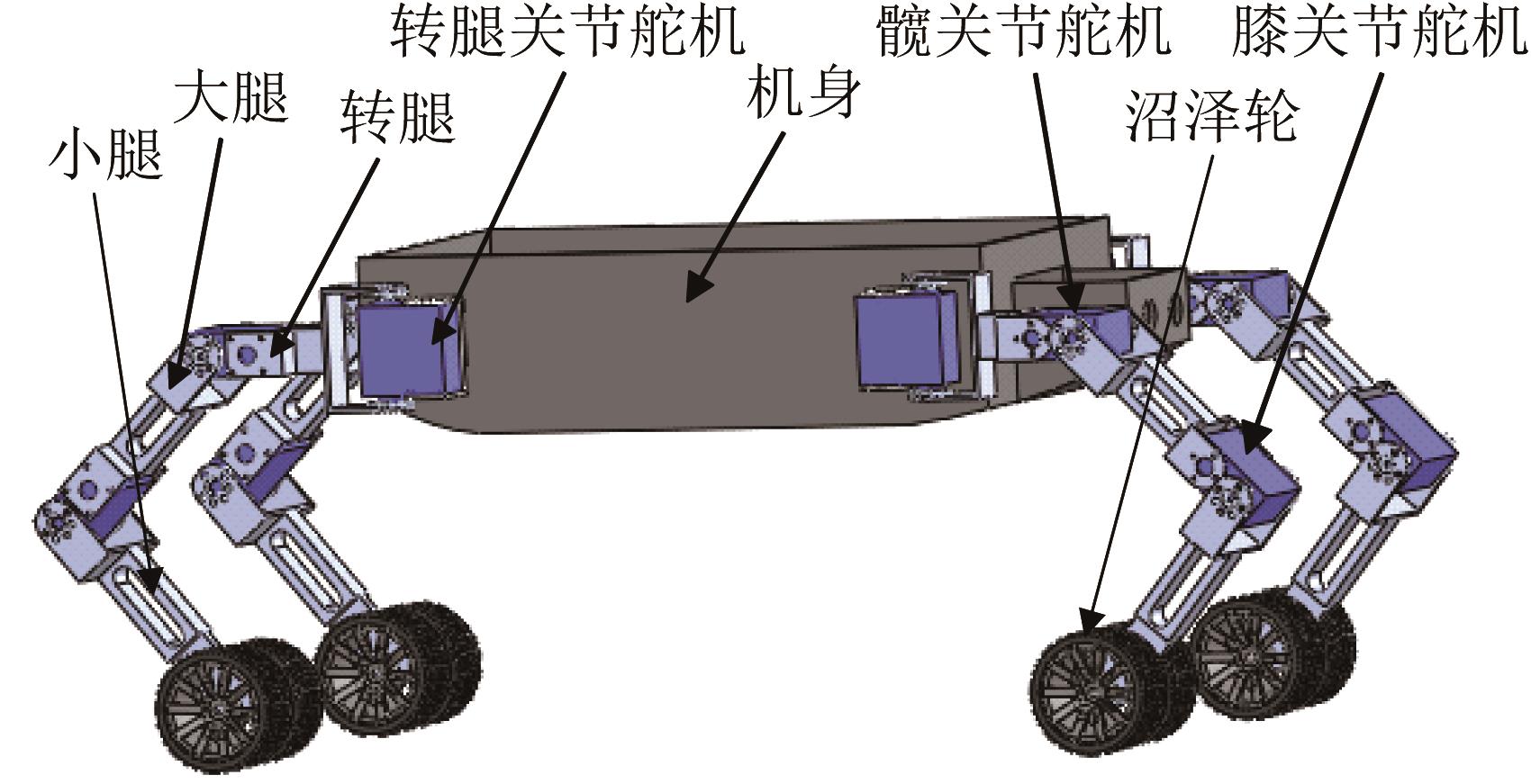
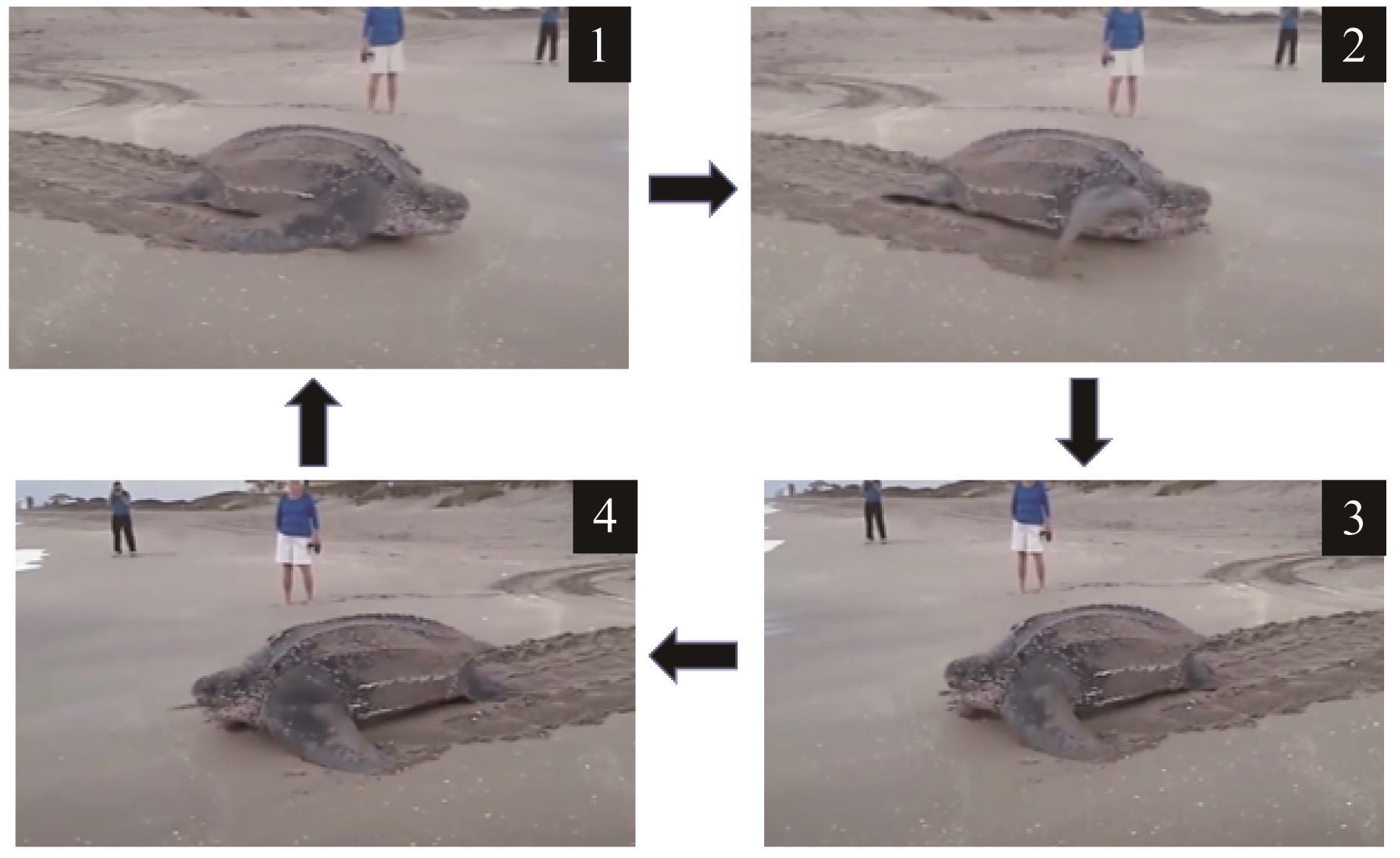
| 受海龟爬行与山羊行走启发的四足仿生移动机器人多步态规划及动力学分析 |
芮宏斌( ),王天赐,厍龙林(),段凯文,李耒,郭旋,彭家璇 ),王天赐,厍龙林(),段凯文,李耒,郭旋,彭家璇 |
| 西安理工大学 机械与精密仪器工程学院,陕西 西安 710048 |
|
| Multi-gait planning and dynamics analysis of quadruped bionic mobile robot inspired by turtle crawling and goat walking |
| Hongbin RUI(),Tianci WANG,Longlin SHE(),Kaiwen DUAN,Lei LI,Xuan GUO,Jiaxuan PENG |
| School of Mechanical and Precision Instrument Engineering, Xi'an University of Technology, Xi'an 710048, China |
引用本文:
芮宏斌,王天赐,厍龙林,段凯文,李耒,郭旋,彭家璇. 受海龟爬行与山羊行走启发的四足仿生移动机器人多步态规划及动力学分析[J]. 工程设计学报, 2024, 31(3): 309-318.
Hongbin RUI,Tianci WANG,Longlin SHE,Kaiwen DUAN,Lei LI,Xuan GUO,Jiaxuan PENG. Multi-gait planning and dynamics analysis of quadruped bionic mobile robot inspired by turtle crawling and goat walking[J]. Chinese Journal of Engineering Design, 2024, 31(3): 309-318.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2024.03.181
或
https://www.zjujournals.com/gcsjxb/CN/Y2024/V31/I3/309
|
| 1 |
程书波,李冲.基于知识图谱的我国自然灾害防治现状及趋势分析[J].中国防汛抗旱,2023,33(4):54-60.
CHENG S B, LI C. Current situation and trend analysis of natural disaster prevention in China based on knowledge graph[J]. China Flood & Drought Management, 2023, 33(4): 54-60.
|
| 2 |
冯飞.群策群力协同推进加快发展我国应急产业[J].中国应急管理,2015(11):58-59.
FENG F. Work together to accelerate the development of China's emergency industry[J]. China Emergency Management, 2015(11): 58-59.
|
| 3 |
喇蕊芳,薛芳明,白鹏飞,等.基于“情景-任务”的重特大地质灾害救援装备调配优化[J].安全与环境学报,2023,23(5):1568-1578.
LA R F, XUE F M, BAI P F, et al. Optimizing the rescue equipment allocation of major geological disasters based on “scenario-task”[J]. Journal of Safety and Environment, 2023, 23(5): 1568-1578.
|
| 4 |
李管良,陆强,王富尧,等.发展高效救援处置装备提高消防安全治理成效[J].中国应急管理,2022(6):78-81.
LI G L, LU Q, WANG F Y, et al. Development of efficient rescue and disposal equipment to improve the effectiveness of fire safety governance[J]. China Emergency Management, 2022(6): 78-81.
|
| 5 |
蔡鹤皋.机器人将是21世纪技术发展的热点[J].中国机械工程,2000,11(1/2):58-60. doi:10.3321/j.issn:1004-132X.2000.01.015
CAI H G. Robot will be a hot spot of technological development in the twenty first century[J]. China Mechanical Engineering, 2000, 11(1/2): 58-60.
doi: 10.3321/j.issn:1004-132X.2000.01.015
|
| 6 |
赵海朋,张凌燕.“十四五”时期我国机器人产业发展关键在于做好三个“关键”[J].机器人产业,2022(2):12-16.
ZHAO H P, ZHANG L Y. The key to the development of China's robot industry during the“14th Five Year Plan” period lies in doing well in three “keys”[J]. Robot Industry, 2022(2): 12-16.
|
| 7 |
KAWAMUR Y, SHIMOYA J, YOSHIDA E, et al. Design and development of amphibious robot with fin actuators[J]. International Journal of Offshore and Polar Engineering, 2010, 20(3): ISOPE-10-20-3-175.
|
| 8 |
CHEN J P, SAN H J, WU X, et al. Structural design and gait research of a new bionic quadruped robot[J]. Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture, 2021(5): 1-11.
|
| 9 |
李满宏,张明路,张建华,等.基于增强学习的六足机器人自由步态规划[J].机械工程学报,2019,55(5):36-44. doi:10.3901/jme.2019.05.036
LI M H, ZHANG M L, ZHANG J H, et al. Free gait planning for a hexapod robot based on reinforcement learning[J]. Journal of Mechanical Engineering, 2019, 55(5): 36-44.
doi: 10.3901/jme.2019.05.036
|
| 10 |
丁良宏.BigDog四足机器人关键技术分析[J].机械工程学报,2015,51(7):1-23. doi:10.3901/jme.2015.07.001
DING L H. Key technology analysis of BigDog quadruped robot[J]. Journal of Mechanical Engineering, 2015, 51(7): 1-23.
doi: 10.3901/jme.2015.07.001
|
| 11 |
张铭钧,刘晓白,徐建安,等.海龟柔性前肢仿生推进研究[J].机器人,2011,33(1):229-236. doi:10.3724/sp.j.1218.2011.00229
ZHANG M J, LIU X B, XU J A, et al. Bionic research on turtle's flexible forelimb propulsion[J]. Robot, 2011, 33(1): 229-236.
doi: 10.3724/sp.j.1218.2011.00229
|
| 12 |
张兵,郑彦宁,徐文福,等.基于舞台表演用海龟机器人四足协调步态规划[J].仪器仪表学报,2017,38(3):545-551. doi:10.3969/j.issn.0254-3087.2017.03.005
ZHANG B, ZHENG Y N, XU W F, et al. Coordinated quadrupedal gait planning of turtle robot for performing at digital stage[J]. Chinese Journal of Scientific Instrument, 2017, 38(3): 545-551.
doi: 10.3969/j.issn.0254-3087.2017.03.005
|
| 13 |
芮宏斌,李路路,王天赐,等.两栖仿海龟机器人动力学建模与运动控制研究[J].工程设计学报,2023,30(1):73-81. doi:10.3785/j.issn.1006-754X.2023.00.007
RUI H B, LI L L, WANG T C, et al. Research on dynamic modeling and motion control of amphibious turtle inspired robot[J]. Chinese Journal of Engineering Design, 2023, 30(1): 73-81.
doi: 10.3785/j.issn.1006-754X.2023.00.007
|
| 14 |
芮宏斌,李路路,曹伟.两栖仿海龟机器人步态规划及分析[J].机械科学与技术,2023,42(1):46-52.
RUI H B, LI L L, CAO W. Gait planning and analysis of amphibious turtle inspired robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2023, 42(1): 46-52.
|
| 15 |
王明昊,汪满新.一种新型五自由度混联机器人动力学建模与性能评价[J].机械工程学报,2023,59(9):63-75. doi:10.3901/jme.2023.09.063
WANG M H, WANG M X. Dynamic modeling and performance evaluation of a new five-DOF hybrid robot[J]. Journal of Mechanical Engineering, 2023, 59(9): 63-75.
doi: 10.3901/jme.2023.09.063
|
| 16 |
张冬冬,江一行,范云杰,等.基于仿生水母的水下机器人结构设计与试验研究[J].机电工程,2024,41(4):739-746. doi:10.3969/j.issn.1001-4551.2024.04.020
ZHANG D D, JIANG Y H, FAN Y J, et al. Structural design and experimental study of underwater robots based on biomimetic jellyfish[J]. Journal of Mechanical & Electrical Engineering, 2024, 41(4): 739-746.
doi: 10.3969/j.issn.1001-4551.2024.04.020
|
| 17 |
孟健,李贻斌,李彬.四足机器人对角小跑步态全方位移动控制方法及其实现[J].机器人,2015,37(1):74-84.
MENG J, LI Y B, LI B. Control method and its implementation of quadruped robot in omni-directional trotting gait[J]. Robot, 2015, 37(1): 74-84.
|
| 18 |
张楠,姜文通,牛宝山,等.轮腿式自动引导小车结构设计与行走步态规划[J].机械科学与技术,2021,40(2):211-217.
ZHANG N, JIANG W T, NIU B S, et al. Structural design and walking gait planning of wheel-legged AGV[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(2): 211-217.
|
| 19 |
韩清凯,罗忠.机械系统多体动力学分析、控制与仿真[M].北京:科学出版社,2010:8-28.
HAN Q K, LUO Z. Multi-body dynamics analysis, control and simulation of mechanical systems[M]. Beijing: Science Press, 2010: 8-28.
|
| 20 |
李加启.高速四足机器人液压支腿动力学分析及运动 控制[D].哈尔滨:哈尔滨工业大学,2019:22-61.
LI J Q. Dynamic analysis and motion control of hydraulic leg in high speed quadruped robot[D]. Harbin: Harbin Institute of Technology, 2019: 22-61.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|