


为提高救援机器人在复杂环境下的运动能力,学者们从结构、运动方式和步态控制等方面对机器人进行了优化设计。例如:Kawamur等人[7]设计的两栖机器人在运动模式上实现了创新,该机器人同时具备仿海龟游泳和仿陆龟爬行两种运动模式,可实现在水域和陆地两种环境下的运动;Chen等人[8]设计了一种轮腿式复合机器人,其采用轮式时可在平坦地面上连续转动,采用腿式时可借助二自由度刚性腿跨越不平坦地面;李满宏等人[9]设计了一种具有变形关节和轮式足端的机器人,并为其规划了轮式移动、爬行与步行等运动模式,该机器人具有较好的环境适应能力。综上,现有机器人在硬质地面上已具备良好的运动能力,但其在松软地面上的运动能力亟待提升。
为此,本文借鉴海龟在松软地面上稳定爬行的能力和山羊优越的地形适应能力,设计了一种用于灾后救援的四足仿生移动机器人,并为其规划仿海龟爬行步态和仿山羊行走步态,使其具备在松软地面和硬质路面上运动的能力,以适应复杂的地形环境。
1 四足仿生移动机器人结构设计
1.1 机器人拓扑结构
海龟主要由身体与四肢构成,四肢与身体的连接相当于球铰接,可以绕任意方向转动。参考海龟身体和四肢的结构,通过简化处理得到仿海龟机器人的拓扑结构,如图1所示。该机器人主要由机身及与机身两侧并联的4条支腿组成。若要实现仿海龟爬行步态,则机器人的支腿需要具有绕转腿关节(
图1
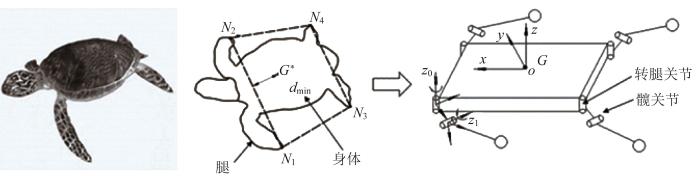
图2

综上,机器人若要实现仿海龟爬行步态,则只需绕转腿关节与髋关节的2个转动自由度;若要实现仿山羊行走步态,则只需绕髋关节与膝关节的2个转动自由度。因此,若机器人同时具备转腿关节、髋关节和膝关节三个转动关节,则通过调节支腿位姿并对3个转动关节的运动时序进行合理设计,即可实现仿海龟爬行与仿山羊行走这2种不同的运动方式。基于此,受海龟爬行与山羊行走启发的四足仿生移动机器人的拓扑结构如图3所示。当机器人将4条支腿调节到机身两侧时,机器人呈仿海龟爬行姿态,此时支腿的膝关节锁定,大腿和小腿为一体,通过转腿关节与髋关节的前后、上下摆动来实现支腿运动;当机器人将4条支腿调节到机身下方时,机器人呈仿山羊行走姿态,此时转腿关节锁定,通过髋关节与膝关节动作来实现支腿的抬起、落下、前摆与后蹬。
图3

1.2 机器人结构
图4
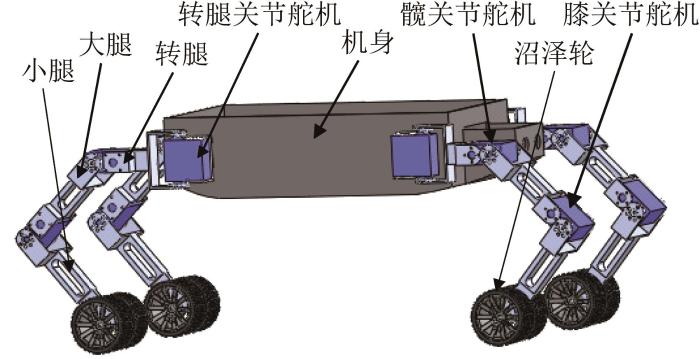
表1 四足仿生移动机器人的结构参数
Table 1
| 参数 | 数值 |
|---|---|
机身尺寸(长×宽×高)/ (mm×mm×mm) | 爬行姿态:530×320×75 行走姿态:480×130×190 |
| 转腿长度/mm | 30 |
| 大腿长度/mm | 100 |
| 小腿长度/mm | 100 |
| 沼泽轮尺寸(直径×厚度)/(mm×mm) | 50×15 |
| 整机质量/kg | 2.8 |
机器人的每条支腿均由转腿、大腿、小腿、沼泽轮和关节舵机组成。其中:转腿与安装在机身上的转架相连,在转腿关节舵机的驱动作用下,转腿带动整条支腿绕转架转动,以实现运动模式的切换;髋关节舵机与膝关节舵机分别用于驱动大腿绕转腿、小腿绕大腿的转动。整条支腿为串联结构,具有3个转动自由度,通过控制驱动舵机的工作时序,即可使4条支腿相互配合,以实现机器人的向前、向后、向左和向右移动。
机器人支腿末端采用的沼泽轮为自由轮,由2个橡胶轮胎组成。沼泽轮通过销轴与支腿末端连接,这样的布置方式可提高机器人的稳定性和对复杂地形的适应能力。一方面,当机器人爬行时,沼泽轮在地面上滚动,大大减小了与地面的摩擦力;同时,沼泽轮滚动时受到地面侧向力的作用,胎冠与地面摩擦,胎侧与松软地面相互挤压,可为机器人的爬行提供推力。另一方面,机器人主要应用的环境为滩涂、沼泽、近岸浅水底和岸边等松软路面,这类路面可塑性、黏着性大,机械强度差,采用沼泽轮可减少打滑、下陷现象以及减小沉陷量、黏着力,从而保证机器人正常行驶。
2 四足仿生移动机器人步态规划
自然界中海龟的爬行步态如图5所示。不同于其他四足动物,海龟在地面上爬行时,其身体一直与地面接触,像四肢拖着身体前进,故其身后会留下一道爬行轨迹。这是因为成年海龟为适应水域环境,其四肢进化为较柔软的桨状结构,爬行时四肢难以支撑身体的重量,呈现出独特的“拄拐”式爬行[13]。若将海龟的“拄拐”式爬行动作完全应用于机器人,则会增大机器人的行进阻力。此外,机器人支腿不像海龟四肢一样柔软,可撑起整个机身。基于此,对海龟爬行步态进行改进,为机器人规划了一种仿海龟爬行步态,如图6所示。图6中:足端与机身为虚线代表腾空,为实线代表支撑地面。机器人爬行步态与海龟爬行步态的区别主要在于:机器人在支腿后蹬时将机身撑起,而海龟身体始终与地面接触。在该爬行步态下,机器人机身与4条支腿交替支撑,且支腿支撑时4条支腿同时接触地面,可提高机器人的驱动力和增大机器人与地面的接触面积[14]。
图5
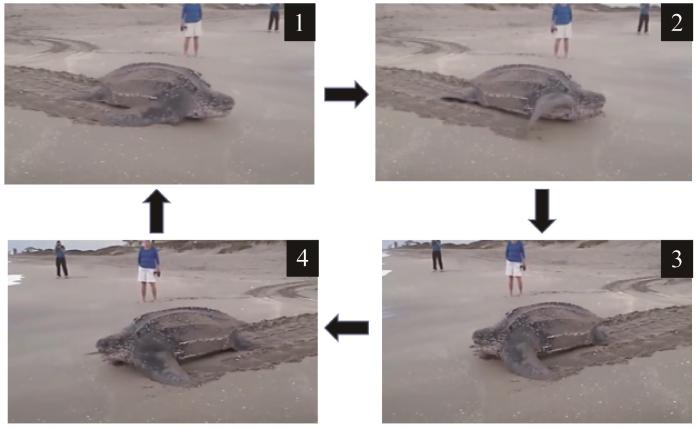
图6

图6
四足仿生移动机器人的仿海龟爬行步态
Fig.6
Turtle-imitated crawling gait of quadruped bionic mobile robot
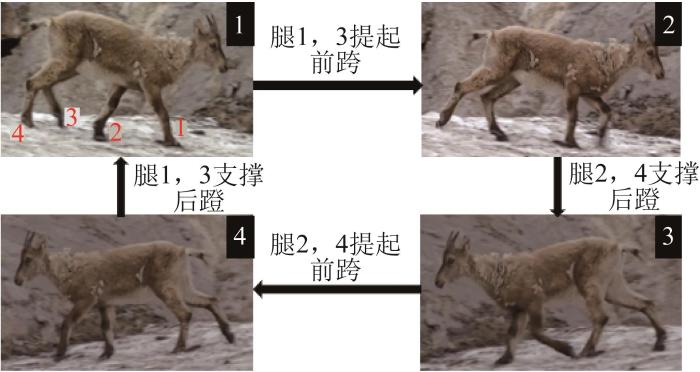
仿海龟爬行步态虽能满足机器人在陆地上的运动要求,但运动速度缓慢且灵活性差。因此,参照山羊行走原理,为机器人规划了一种速度较快的仿山羊行走步态。自然界中山羊的行走步态如图7所示,处于对角的2对腿交替支撑与摆动,实现身体的前进。
图7
所设计的机器人仿山羊行走步态如图8所示。图中RF、LF、LH、RH分别表示右前、左前、左后、右后支腿,对应编号1,2,3,4。在初始状态下,机器人的4条支腿处于同一姿态并将机身撑起。随后,支腿1,3进入摆动相,此时这2条支腿的膝关节与髋关节同步运动,在髋关节摆动前期,膝关节向机身内侧屈曲;在髋关节摆动中期,膝关节的屈曲角度达到最大;在髋关节摆动后期,膝关节开始伸展;在髋关节摆动末期,膝关节恢复原位。与此同时,支腿2,4处于支撑相,其髋关节往后摆动以使支腿推动机身,而膝关节保持原状态,机器人向前前进一个步长,呈图8(c)所示姿态;最后,支腿1,3进入支撑相,支腿2,4进入摆动相,机器人再前进一个步长,从而完成一个步态周期。机器人重复图8(b)至图8(d)过程,即可实现连续快速地前进。
图8
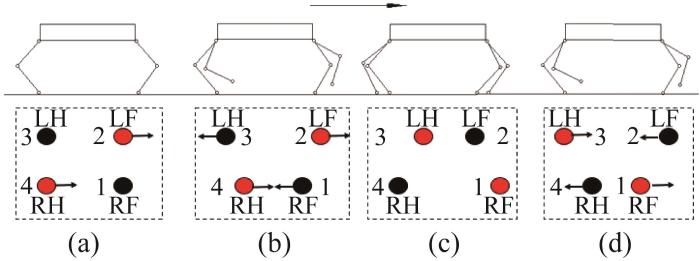
图8
四足仿生移动机器人的仿山羊行走步态
Fig.8
Goat-imitated walking gait of quadruped bionic mobile robot
3 四足仿生移动机器人动力学分析
3.1 动力学模型构建
本文所设计的四足仿生移动机器人的支腿组件繁多,很难精确描述其动力学数学模型。为此,本文采用拉格朗日法对机器人的支腿(以右前支腿为例)进行动力学分析。支腿的简化条件如下[19]:
1)假设支腿为刚性结构,即在运动过程中不发生形变;
2)忽略支腿中各接触部件在运动过程中产生的摩擦力;
3)将转腿、大腿、小腿及各连接部件视作质量均匀的刚体。
机器人支腿中的转腿、大腿和小腿均由安装在对应末端的关节舵机驱动。为方便计算,在动力学建模时将转腿、大腿和小腿看作质量均匀分布的刚性连杆。所建立的支腿动力学分析模型如图9所示。其中:
图9
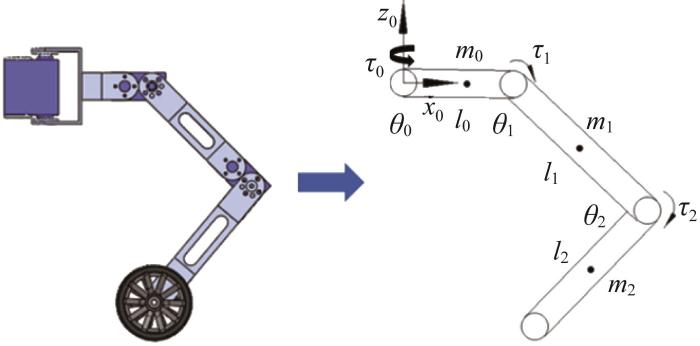
式中:T为支腿的动能,U为支腿的势能,
根据上述拉格朗日方程,可得支腿的动力学方程:
其中:
式中:
3.2 动力学模型验证
为验证上文所构建的机器人支腿动力学模型的正确性,设计了如图10所示的仿真验证技术路线。首先,通过ADAMS动力学仿真得到机器人在仿山羊行走步态下的关节扭矩;然后,将
图10
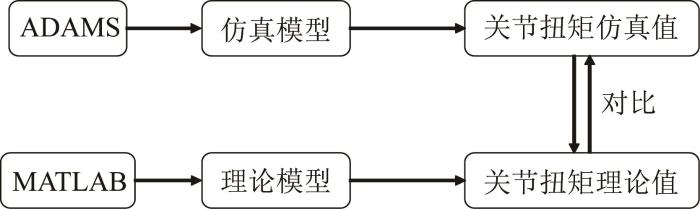
图10
支腿动力学模型仿真验证的技术路线
Fig.10
Technical route for simulation verification of outrigger dynamics model
图11
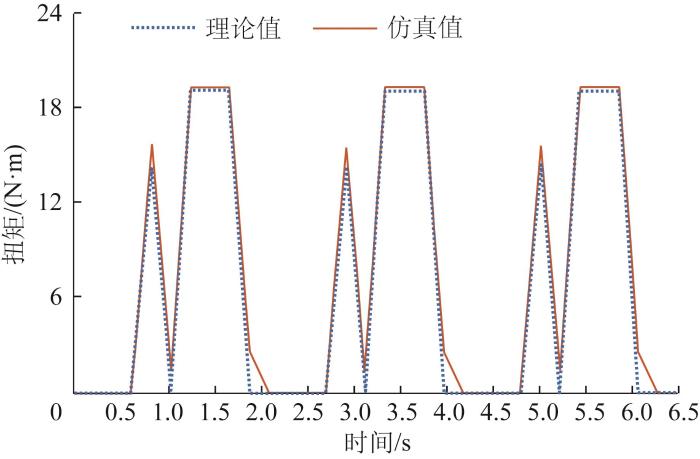
图11
仿山羊行走步态下髋关节扭矩对比
Fig.11
Comparison of hip joint torque under goat-imitated walking gait
图12

图12
仿山羊行走步态下膝关节扭矩对比
Fig.12
Comparison of knee joint torque under goat-imitated walking gait
4 四足仿生移动机器人步态仿真
为了验证所规划的仿海龟爬行步态与仿山羊行走步态的可行性,建立四足仿生移动机器人的虚拟样机模型并开展步态仿真。
图13

图13
四足仿生移动机器人仿海龟爬行步态仿真结果
Fig.13
Simulation result of turtle-imitated crawling gait of quadruped bionic mobile robot
图14
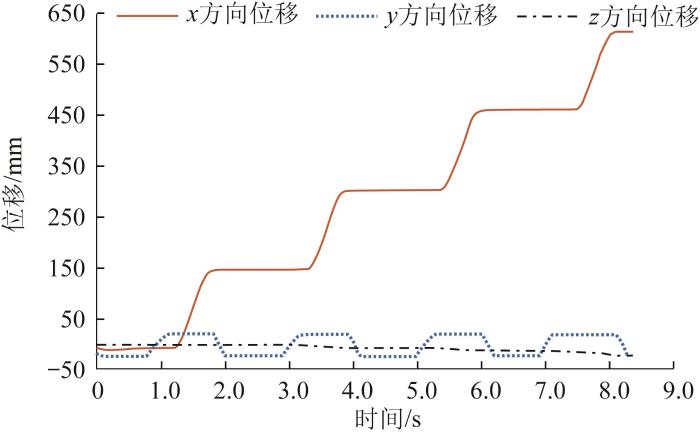
图14
仿海龟爬行步态下机身质心的位移曲线
Fig.14
Displacement curves of fuselage center of mass under turtle-imitated crawling gait
图15
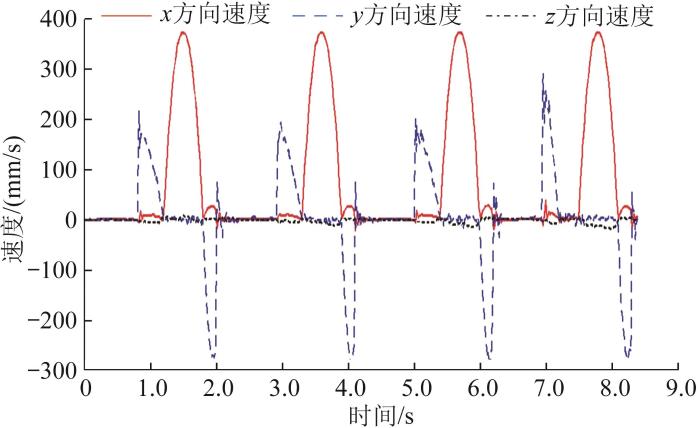
图15
仿海龟爬行步态下机身质心的速度曲线
Fig.15
Velocity curves of fuselage center of mass under turtle-imitated crawling gait
图16
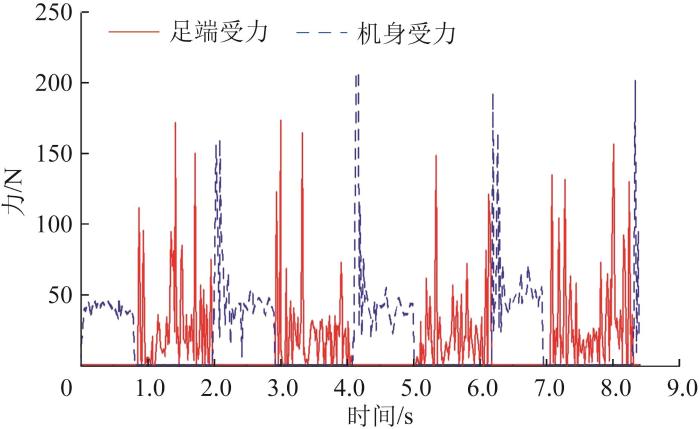
图16
仿海龟爬行步态下机身、足端的受力情况
Fig.16
Force on fuselage and foot end under turtle-imitated crawling gait
图17
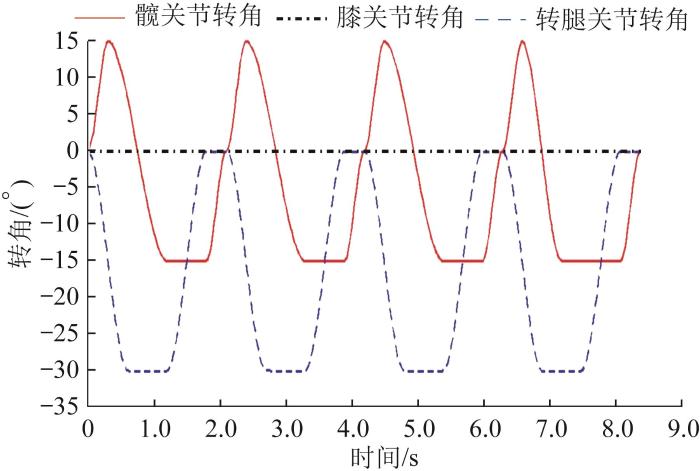
图17
仿海龟爬行步态下各关节转角的变化曲线
Fig.17
Change curve of rotation angle of each joint under turtle-imitated crawling gait
由图14可以看出,机器人在8.4 s内完成了4个爬行步态周期,即向前爬行了4步;机身在x方向(前进方向)上的位移为617 mm;在y方向(竖直方向)上的总位移为0 mm,但机身随步态变化周期性地抬起与落下,高度差为43 mm,这说明在仿海龟爬行步态下机器人的4条支腿周期性地将机身撑高43 mm,这与步态理论规划中机身与支腿交替支撑相符合;机身在z向(横向)上的位移为23 mm,即机器人在前进时向一侧偏移了23 mm,偏移角度为2.1°,说明机器人基本能保持直线前进。由图15可以看出,在仿海龟爬行步态下,机器人呈“拄拐”式前进,机身质心速度曲线的变化规律与位移曲线相吻合,机身在z方向上的速度几乎为0 m/s,说明机器人在运动过程中的横向偏移量很小。图16所示的机身与足端的受力情况表明,在机器人爬行过程中,机身与4条支腿交替支撑,进一步证明了“拄拐”式仿海龟爬行步态的可行性。从图17中可以看出,在仿海龟爬行步态下,膝关节一直保持静止,转腿关节和髋关节周期性转动,以驱动机器人向前爬行。
图18

图18
四足仿生移动机器人仿山羊行走步态仿真结果
Fig.18
Simulation result of goat-imitated walking gait of quadruped bionic mobile robot
图19
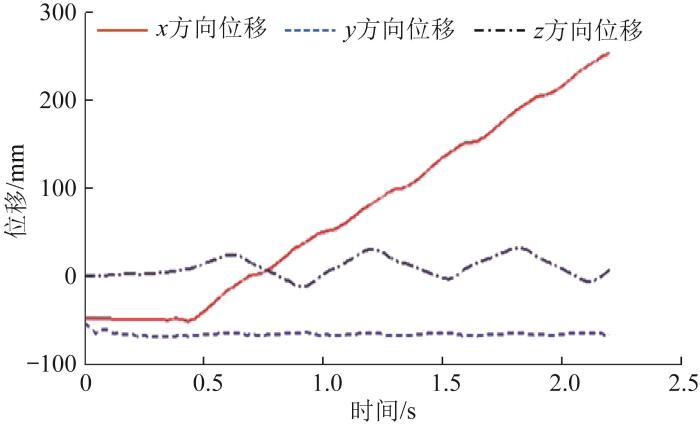
图19
仿山羊行走步态下机身质心的位移曲线
Fig.19
Displacement curves of fuselage center of mass under goat-imitated walking gait
图20
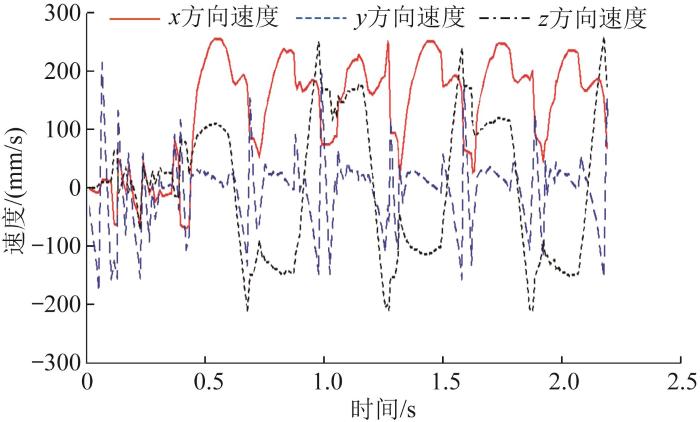
图20
仿山羊行走步态下机身质心的速度曲线
Fig.20
Velocity curves of fuselage center of mass under goat-imitated walking gait
图21
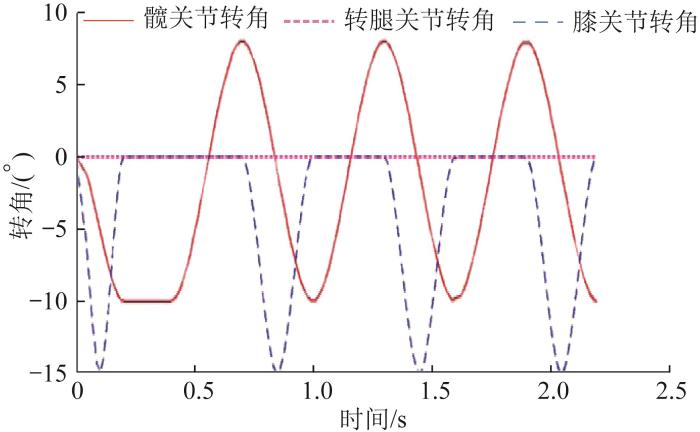
图21
仿山羊行走步态下各关节转角的变化曲线
Fig.21
Change curve of rotation angle of each joint under goat-imitated walking gait
由图19可以看出,在前0.4 s内,机器人原地踏步进行位姿调整,在后2 s 内机器人完成了5个完整的行走步态,机器人共前进了304 mm;2.4 s内机身在前进方向上的总偏移量仅为7 mm,偏移角度为1.3°。这是因为在行走步态下,机器人对角的2条支腿同时起支撑作用,机身在重力作用下会沿对角的2条支腿的连线方向发生翻转,即在机器人行走过程中,机身会发生左右摇摆,但左右摇摆会相互抵消,故总偏移量很小;机身在竖直方向上的位移曲线近似为直线,表明在机器人运动过程中机身上下波动较小。由图20所示的速度曲线可知,仿山羊行走步态下机器人沿前进方向的平均速度为152 mm/s,较仿海龟爬行步态下有大幅提升。从图21中可以看出,在仿山羊行走步态下,机器人的转腿关节保持固定,髋关节与膝关节周期性地动作,以实现快速行走。
5 样机实验
5.1 样机搭建
为进一步验证所设计的四足仿生移动机器人及其规划步态的可行性,按照1∶1的比例搭建机器人样机并开展步态实验。机器人样机由机械结构、电源、驱动系统与控制系统组成。
5.2 步态实验
四足仿生移动机器人仿海龟爬行实验现场如图22所示。实验结果表明,机器人能够按规划的“拄拐”式仿海龟爬行步态稳定运动,爬行时机身离地的最大高度为28 mm,爬行速度为56 mm/s。此外,该机器人在仿海龟爬行步态下还可以爬上坡度为30°的高坡,且能很好地适应沙滩、草地等松软地面。
图22
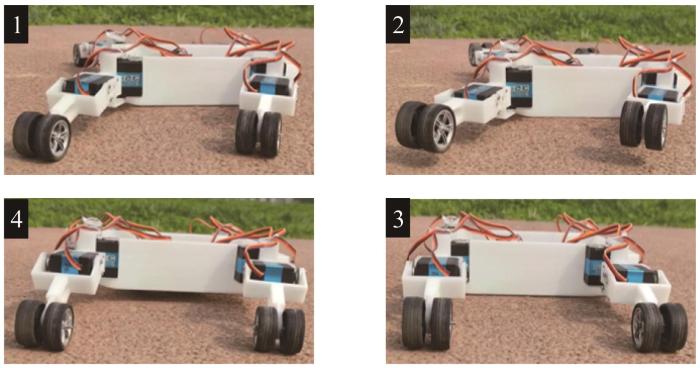
图22
四足仿生移动机器人仿海龟爬行实验现场
Fig.22
Turtle-imitated crawling experiment site of quadruped bionic mobile robot
机器人仿山羊行走实验现场如图23所示。实验结果表明,机器人能按所规划的仿山羊行走步态平稳运动,在5.4 s内前进了1 382 mm,在前进方向上偏移了57 mm,偏移角度为2.3°,平均前进速度为256 mm/s,略低于仿真时的最大速度280 mm/s。可能的原因是舵机存在误差或仿真时所设置的足端-地面的接触参数与实际有较小的偏差。
图23

图23
四足仿生移动机器人仿山羊行走实验现场
Fig.23
Goat-imitated walking experiment site of quadruped bionic mobile robot
图24
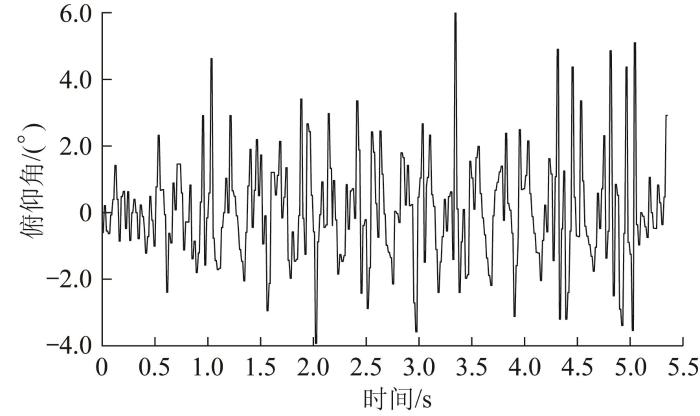
图24
仿山羊行走步态下机身的俯仰角
Fig.24
Pitch angle of fuselage under goat-imitated walking gait
图25
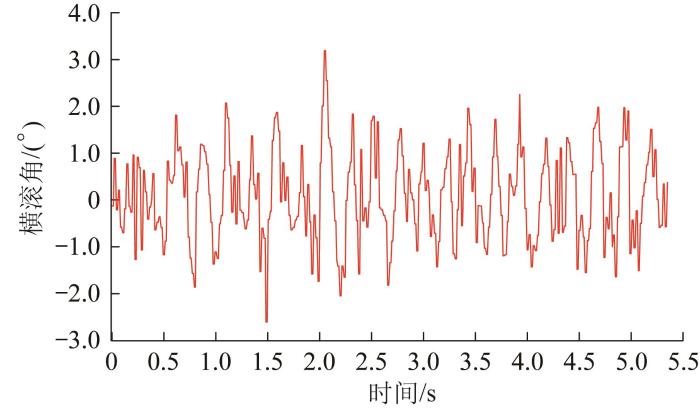
图25
仿山羊行走步态下机身的横滚角
Fig.25
Transverse roll angle of fuselage under goat-imitated walking gait
图26
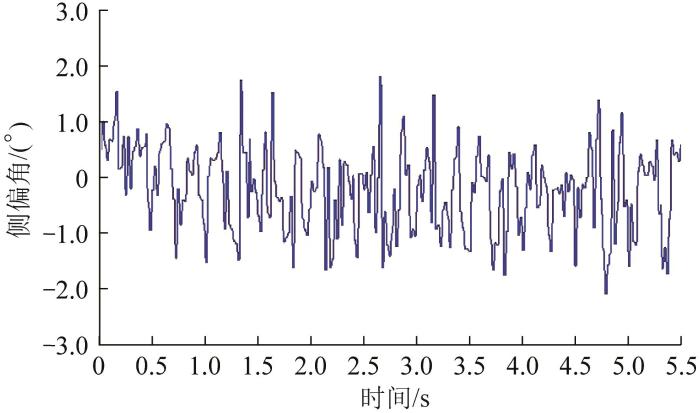
图26
仿山羊行走步态下机身的侧偏角
Fig.26
Lateral deflection angle of fuselage under goat-imitated walking gait
6 结 论
本文以海龟与山羊为仿生对象,设计了具备仿海龟爬行和仿山羊行走两种运动模式的四足仿生移动机器人,并对机器人进行了步态规划和动力学分析,得到如下结论:
1)机器人的结构设计、步态规划合理,所构建的动力学模型正确。所规划的仿海龟爬行步态可以适应松软地面及大坡度地形,仿山羊行走步态具备速度快与灵活性高的优势。
2)搭建了机器人样机并开展步态实验,验证了机器人的运动能力。结果表明,机器人能实现仿海龟爬行与仿山羊行走;在仿海龟爬行步态下,机器人不仅能爬越30°的高坡,还能在松软的沙滩和草地上平稳运动;在仿山羊行走步态下,机器人的运动速度较快,且在运动过程中可保持水平姿态。
参考文献
基于知识图谱的我国自然灾害防治现状及趋势分析
[J].
Current situation and trend analysis of natural disaster prevention in China based on knowledge graph
[J].
群策群力协同推进加快发展我国应急产业
[J].
Work together to accelerate the development of China's emergency industry
[J].
基于“情景-任务”的重特大地质灾害救援装备调配优化
[J].
Optimizing the rescue equipment allocation of major geological disasters based on “scenario-task
”[J].
发展高效救援处置装备提高消防安全治理成效
[J].
Development of efficient rescue and disposal equipment to improve the effectiveness of fire safety governance
[J].
机器人将是21世纪技术发展的热点
[J].DOI:10.3321/j.issn:1004-132X.2000.01.015
Robot will be a hot spot of technological development in the twenty first century
[J].DOI:10.3321/j.issn:1004-132X.2000.01.015
“十四五”时期我国机器人产业发展关键在于做好三个“关键”
[J].
The key to the development of China's robot industry during the“14th Five Year Plan” period lies in doing well in three “keys”
[J].
Design and development of amphibious robot with fin actuators
[J].
Structural design and gait research of a new bionic quadruped robot
[J].
基于增强学习的六足机器人自由步态规划
[J].DOI:10.3901/jme.2019.05.036 [本文引用: 1]
Free gait planning for a hexapod robot based on reinforcement learning
[J].DOI:10.3901/jme.2019.05.036 [本文引用: 1]
BigDog四足机器人关键技术分析
[J].DOI:10.3901/jme.2015.07.001 [本文引用: 1]
Key technology analysis of BigDog quadruped robot
[J].DOI:10.3901/jme.2015.07.001 [本文引用: 1]
海龟柔性前肢仿生推进研究
[J].DOI:10.3724/sp.j.1218.2011.00229 [本文引用: 1]
Bionic research on turtle's flexible forelimb propulsion
[J].DOI:10.3724/sp.j.1218.2011.00229 [本文引用: 1]
基于舞台表演用海龟机器人四足协调步态规划
[J].DOI:10.3969/j.issn.0254-3087.2017.03.005 [本文引用: 1]
Coordinated quadrupedal gait planning of turtle robot for performing at digital stage
[J].DOI:10.3969/j.issn.0254-3087.2017.03.005 [本文引用: 1]
两栖仿海龟机器人动力学建模与运动控制研究
[J].DOI:10.3785/j.issn.1006-754X.2023.00.007 [本文引用: 1]
Research on dynamic modeling and motion control of amphibious turtle inspired robot
[J].DOI:10.3785/j.issn.1006-754X.2023.00.007 [本文引用: 1]
两栖仿海龟机器人步态规划及分析
[J].
Gait planning and analysis of amphibious turtle inspired robot
[J].
一种新型五自由度混联机器人动力学建模与性能评价
[J].DOI:10.3901/jme.2023.09.063 [本文引用: 1]
Dynamic modeling and performance evaluation of a new five-DOF hybrid robot
[J].DOI:10.3901/jme.2023.09.063 [本文引用: 1]
基于仿生水母的水下机器人结构设计与试验研究
[J].DOI:10.3969/j.issn.1001-4551.2024.04.020
Structural design and experimental study of underwater robots based on biomimetic jellyfish
[J].DOI:10.3969/j.issn.1001-4551.2024.04.020
四足机器人对角小跑步态全方位移动控制方法及其实现
[J].
Control method and its implementation of quadruped robot in omni-directional trotting gait
[J].
轮腿式自动引导小车结构设计与行走步态规划
[J].
Structural design and walking gait planning of wheel-legged AGV
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}