受海龟爬行与山羊行走启发的四足仿生移动机器人多步态规划及动力学分析
芮宏斌( ),王天赐,厍龙林(),段凯文,李耒,郭旋,彭家璇
),王天赐,厍龙林(),段凯文,李耒,郭旋,彭家璇
),王天赐,厍龙林(),段凯文,李耒,郭旋,彭家璇
Multi-gait planning and dynamics analysis of quadruped bionic mobile robot inspired by turtle crawling and goat walking
Hongbin RUI(),Tianci WANG,Longlin SHE(),Kaiwen DUAN,Lei LI,Xuan GUO,Jiaxuan PENG
),Tianci WANG,Longlin SHE(),Kaiwen DUAN,Lei LI,Xuan GUO,Jiaxuan PENG
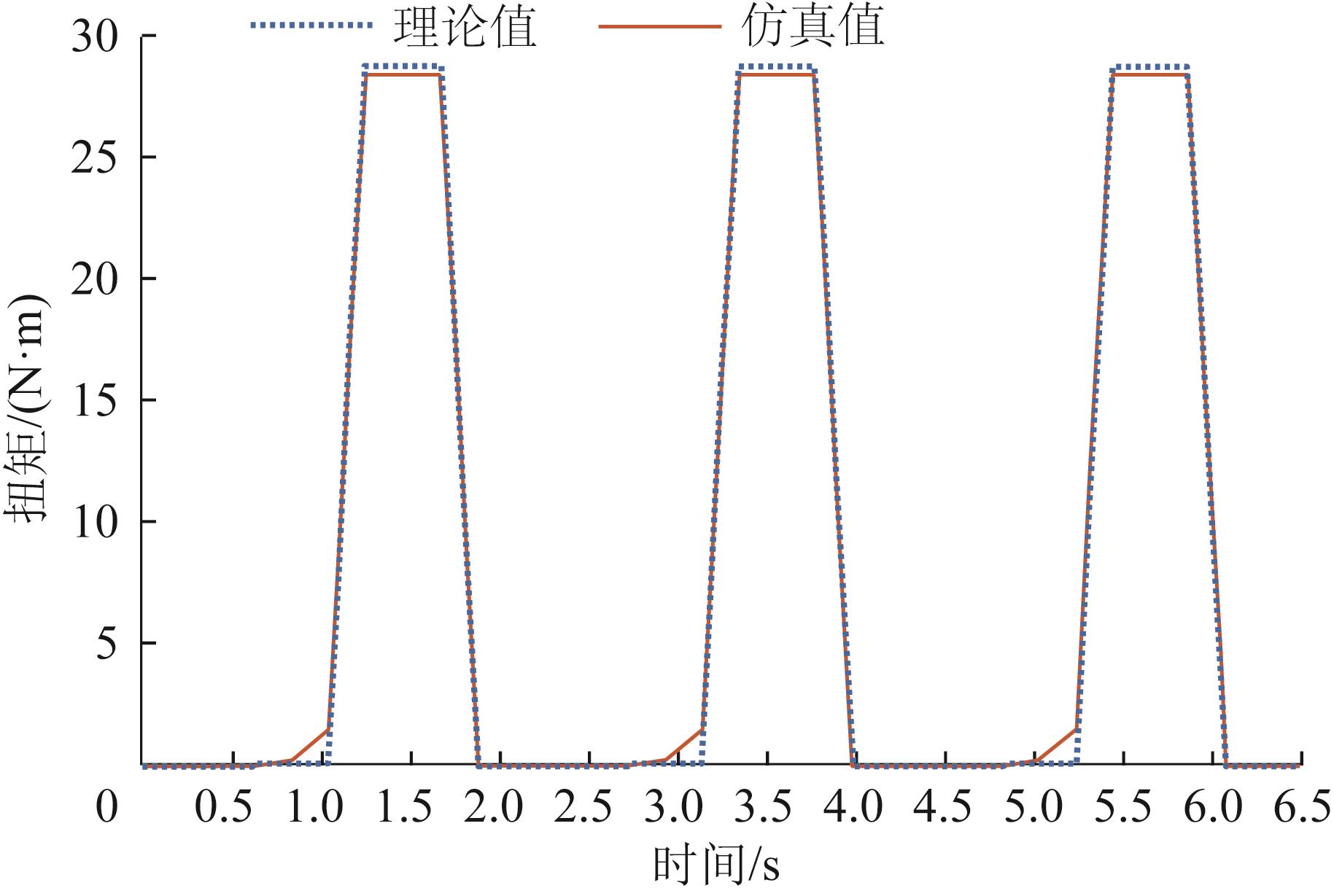
图12. 仿山羊行走步态下膝关节扭矩对比
Fig.12. Comparison of knee joint torque under goat-imitated walking gait