

包括Dijkstra算法[3]、A*算法[4]及人工势场法[5]等在内的传统路径规划算法在结构化且障碍较少的环境中性能优秀,但在存在大量障碍物或路径狭窄的复杂环境中规划效果不理想. 由于搜索受到网格分辨率或启发式函数精度的限制,Dijkstra与 A*算法可能导致路径质量下降或计算复杂度上升;在遇到局部最小值或复杂地形时,人工势场法可能会困于局部最优位置,无法有效找到出路. 快速探索随机树[6](rapidly-exploring random tree, RRT)是基于随机采样技术的有效且概率上完备的路径规划算法. RRT及其衍生版本已在移动机器人和机械臂的导航任务中得到广泛应用. 该算法的主要理念是在搜索空间中随机选取节点,将节点逐步连接以快速覆盖整个搜索区域并找到从起始点至目标点的可行路径[7]. 原始RRT算法[8-9]具有随机采样的特点,在包含大量障碍物和狭长通道的环境中往往会生成较多无效的采样点. 此外,RRT的随机性也使得生成的路径在一定程度上缺乏可预测性和可控性. 巩浩等[10]针对RRT搜索随机性强的问题,提出将概率目标偏置与人工势场相结合的采样策略. 该策略减少了采样的随机性,加快了收敛速度. 在复杂环境下,势场的计算速度较慢且易陷入局部最优. Karaman等[11]提出的RRT*算法,通过在每次迭代中重新连接节点并优化路径,使生成的路径逐步趋近于最优,路径质量得到提升. 该算法的计算复杂度较高,尤其是在大规模或复杂环境中,多次迭代才能获得接近最优的路径. 龚立雄等[12]提出Informed-RRT*算法,结合正态分布节点采样与椭圆采样策略,增强了随机树搜索的目标性,但在狭长通道内表现较差. Multi-risk-RRT算法[13]结合多个子树,每个子树独立探索周围环境,并通过高斯混合模型将子树转化为启发式信息,指导主树的生长方向. 然而,子树的放置策略对算法效率有较大影响,导致该方法存在一定的随机性,仍有优化空间. 李昭莹等[14]在RRT中整合深度Q学习(deep Q-learning)算法,引入复杂步长的概念,以学习最佳生长方向和步长,提高了算法的规划效率. Zhao等[15]提出基于生成对抗网络(generative adversarial network, GAN)的生命周期学习框架,将生成式直接轨迹规划(generative direct trajectory planning, GDTP)模型嵌入RRT,实现长距离和多阶段的规划,但GAN需要大量计算资源,不适合在资源受限的移动端设备上部署. Zhang等[16]使用GAN生成可能存在路径的区域用于非均匀采样,大大提高了采样效率,该方法对路径存在区域的预测成功率仍有待提高.
本研究提出基于语义分割的启发式采样路径规划算法,包含最优路径区域预测和路径规划2个主要步骤. 在预测阶段,设计以地图与起点终点图像为输入的最优路径区域预测网络模型(optimal path area prediction network model, OPAPN). 针对传统深度学习语义分割任务在路径规划应用中常见的全局信息缺失问题,引入全局特征提取模块以捕捉全局障碍物的布局以及起点至终点的信息. 设计融合注意力机制的模块,增强网络对地图空间信息的关注. 在解码器环节采用可切换空洞卷积(switchable atrous convolution, SAC)[17]技术,以提升网络检测不同尺度障碍物的能力. 在路径规划阶段,通过对OPAPN预测出的最优路径区域进行启发式采样来有效减少冗余采样点,借助双树扩展机制加速算法的收敛速率.
1. 最优路径区域预测网络模型
如图1所示,OPAPN主要由编码器、特征聚合模块(feature aggregation module, FAM)和解码器3个部分构成. 编码器采用 MobileNetV2网络[18]初步提取地图特征. FAM将特征划分为浅层特征和主干特征进行处理. 浅层特征经由1个包含卷积、批归一化和激活函数的卷积块处理,主干特征通过全局特征提取模块(global feature extraction, GFE)、融合注意力(hybrid attention, HA)以及空洞空间金字塔池化(atrous spatial pyramid pooling, ASPP)[19]等步骤处理. 在FAM末尾,将浅层特征与主干特征通过特征拼接模块合并. 解码器包括3个部分:可切换空洞卷积、反卷积上采样和分类卷积块.
图 1
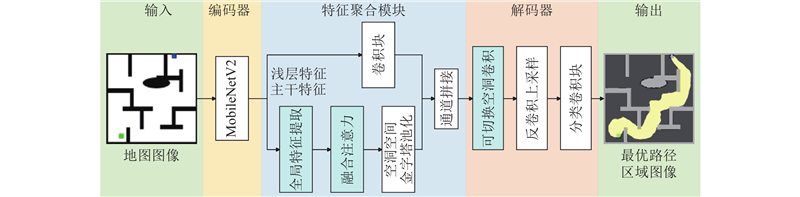
图 1 最优路径区域预测网络模型的结构
Fig.1 Architecture of optimal path area prediction network model
1.1. 全局特征提取模块
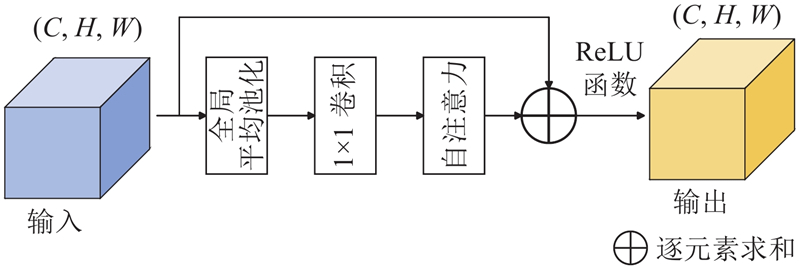
GFE旨在满足特定语义分割任务对全局信息的需要,该任务的输入包括可行区域、障碍物区域以及起点终点信息. 区别于依赖像素级细节的传统深度学习语义分割,特定语义分割任务侧重于全局障碍物布局及路径规划信息的理解. 为了有效识别连接起点与终点的最优路径区域,GFE负责处理和整合由编码器提取的关键特征. GFE通过捕获全局障碍物的分布以及起点终点的位置信息,为解码器提供丰富的上下文信息以实现精确的路径分割. 引入GFE的主要目的:弥补传统深度学习语义分割在处理全局信息时的不足,提升复杂环境中路径规划的准确性及可靠性.
如图2所示,为了增强对全局特征信息的捕获,GFE将全局平均池化、1×1卷积和自注意力机制[20]结合. 其中
图 2
1.2. 融合注意力机制
在处理语义分割的任务时,并非所有由编码器提取的特征都对最终分割结果至关重要. 注意力机制[20]是动态权重分配策略,能够使模型更加关注与特定任务最相关的输入数据部分,从而提高处理复杂信息的效率和准确性. 本研究将注意力机制整合进特征聚合模块,使网络能够有选择性地聚焦关键特征,同时忽略不相关的信息,提升整体性能. 与传统深度学习语义分割不同,预测最优路径区域的任务须准确识别并连通起点和终点间的可行路径,而非简单基于像素级分割对象. 为了增强模型对全局地图信息的识别与理解能力,设计融合坐标注意力[21](coordinate attention, CA)和交叉注意力[22](criss-cross attention, CCA)的注意力模块.
1.2.1. 坐标注意力
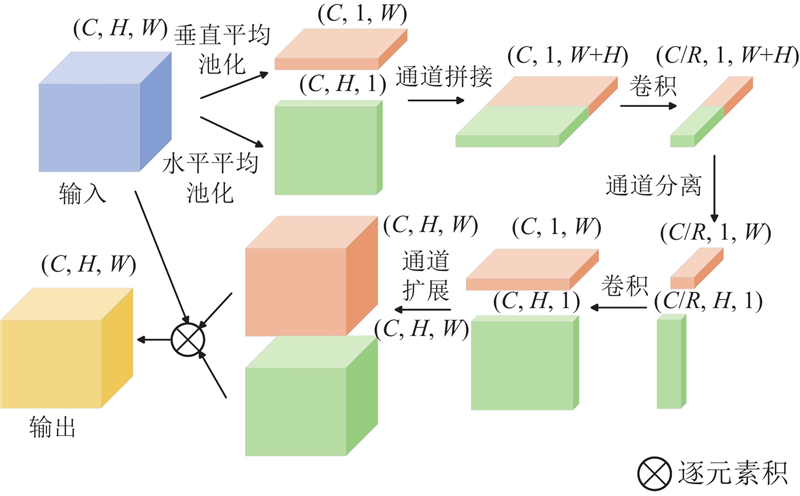
如图3所示,坐标注意力结构独立地处理输入特征图在水平与垂直方向上的信息,能够精确地捕捉空间位置数据. 坐标注意力机制显著增强了模型对全局和局部特征的感知能力,使模型在空间依赖性任务中的性能得到提升. 其中R为卷积核的感受野. 具体而言,1)对输入特征图进行水平和垂直方向的全局平均池化. 2)经过池化的特征通过一系列共享的卷积层与激活函数处理,产生分别对应水平和垂直方向的注意力权重. 3)将生成的权重调整回原始特征图的尺寸,并与输入特征图进行元素级乘法,得到加强后的输出特征图. 在预测最优路径区域的任务中,坐标注意力可以有效地捕获并利用地图内的空间定位信息,帮助模型更精准地辨识起点与终点之间的路径. 坐标注意力专注于特定坐标,有助于减轻模型对无关区域的计算压力,进而提高整体效率.
图 3
1.2.2. 交叉注意力
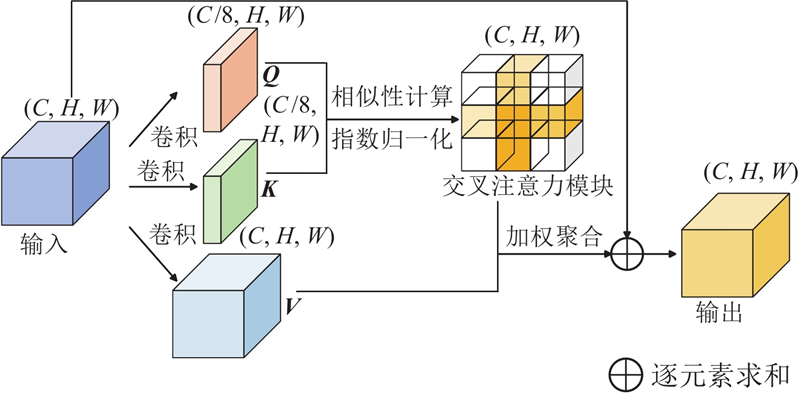
如图4所示,交叉注意力通过分别计算输入特征图在水平和垂直方向的全局注意力,有效捕获图像中的长程依赖关系,从而增强模型对全局信息的感知能力. 具体而言:1)利用卷积操作生成查询 Q、键K和值V 映射;2)在水平和垂直方向分别计算 Q 与 K 之间的相似度矩阵,并通过 Softmax 激活函数获得对应的注意力权重;3)将得到的注意力权重加权求和到 V 映射上,得到水平与垂直方向的注意力特征图;4)将水平与垂直方向的注意力特征图进行融合,并与原始输入特征图结合,形成增强的输出特征图. 交叉注意力模块能够同时建模水平与垂直方向的相关性,以全面捕获全局上下文信息,为模型提供更丰富的上下文特征表达,提升复杂场景下的特征建模能力.
图 4
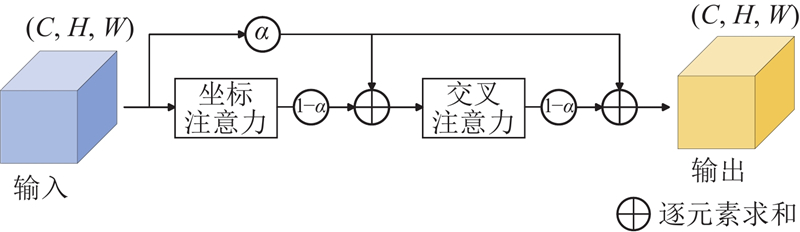
1.2.3. 特征融合模块
为了有效利用输入特征图的空间维度信息,提高预测算法识别最优路径区域的能力,构建如图5所示的融合注意力模块. 为了使该模块逐步学习关键空间特征,引入自适应权重
图 5
式中:
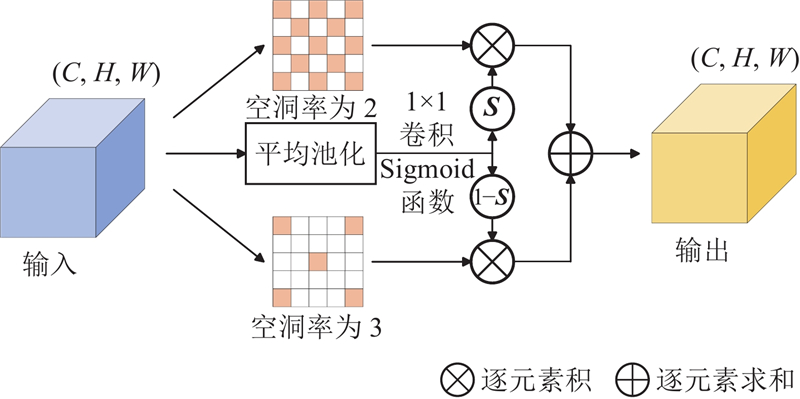
1.3. 可切换空洞卷积技术
通过在卷积核之间插入空洞,空洞卷积[23]可以在不增加额外参数的条件下扩大感受野,从而帮助模型捕获更广泛的上下文信息. 这对于预测地图中的最优路径区域尤为重要,原因是空洞卷积可以全面地感知环境中的阻碍,减少因局部信息不足带来的影响. 将可切换空洞卷积引入预测模型,进一步增强感受野的灵活性并保留细节信息. 在解码器模块中,整合如图6所示的SAC技术能够提高预测区域边界的平滑度. 在模块初始化阶段,模型创建2个具有不同扩张率的卷积层,1个平均池化层,2个1×1的卷积层. 其中一个1×1卷积层负责输入变换,另一个用于生成权重张量
图 6
2. 路径规划算法
2.1. 路径规划问题定义
设状态空间
2.2. 经典快速探索随机树路径规划算法
RRT算法基于采样的路径规划算法,算法的主要过程包括随机采样、树结构扩展以及路径生成. 如图7所示为该算法的节点生成过程. 随机选择采样点Qr1在树中找到距离Qr1最近的节点Q3作为父节点,从Q3向Qr1移动1个固定步长的距离,生成新节点Qn1. 检查发现Qn1和Q3之间存在障碍物,因此放弃该节点并重新进行采样. 再次随机采样得到Qr2,从Q3向Qr2拓展1个步长,生成新节点Qn2,检查发现Qr2和Q3之间不存在障碍物,因此将新节点Qn2加入树中. 通过不断采样和扩展,RRT逐步覆盖状态空间,最终连接起点和终点,生成可行路径.
图 7

图 7 快速探索随机树路径规划算法的节点生成过程
Fig.7 Node generation process of rapidly-exploring random tree path planning algorithm
2.3. 改进快速探索随机树路径规划算法
本研究所提改进算法的特点是启发式采样、双树采样和路径平滑.
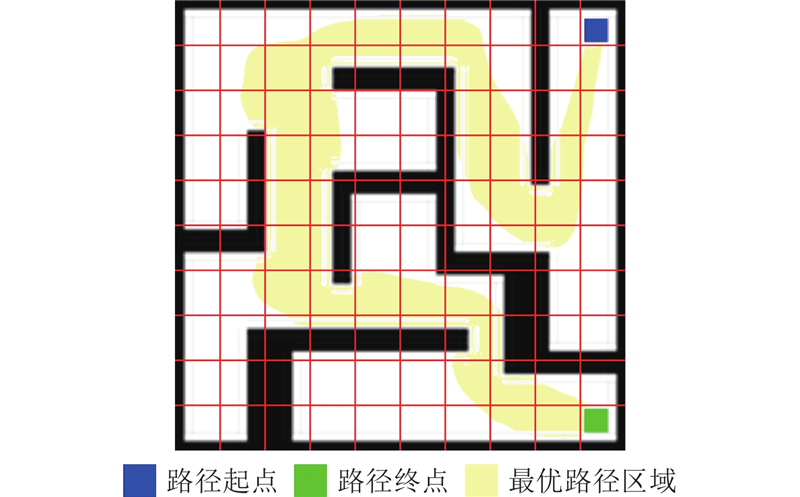
2.3.1. 启发式采样
在经典RRT算法中,状态空间的不断随机采样用以探索该空间. 尽管这种方法确保了采样的概率完备性,但在复杂环境下,可能导致冗余采样. 例如,在特定的路径规划任务中,无需使路径穿过地图的所有区域,因此随机采样可能产生大量的无效节点. 为了降低这种冗余,采用启发式的、非均匀的采样策略. 如图8所示为最优路径区域地图离散化过程. 1)将OPAPN预测得到的图像作为输入,并将地图离散化为多个网格单元. 2)检查在每个网格中是否存在代表最优路径的像素. 3)将包含最优路径的像素值的网格保存在优先采样集合中. 在实施RRT算法时,优先采样集合中的坐标点被采样的可能性更高,采样函数方程为
图 8
式中:
2.3.2. 双树拓展
双向树扩展方法从起点和终点同时构建2棵随机树并进行搜索空间内的连接尝试,能够显著提高路径搜寻的效率,减少无效采样并缩短找到可行路径的时间,尤其适用于复杂环境. 双树拓展的具体执行流程:分别从起点和终点开始随机扩展2棵树;每次扩展选择1个随机点,并将每棵树的末端朝向该随机点延伸,并持续监测2棵树是否发生交汇;一旦2棵树相遇,便可生成路径.
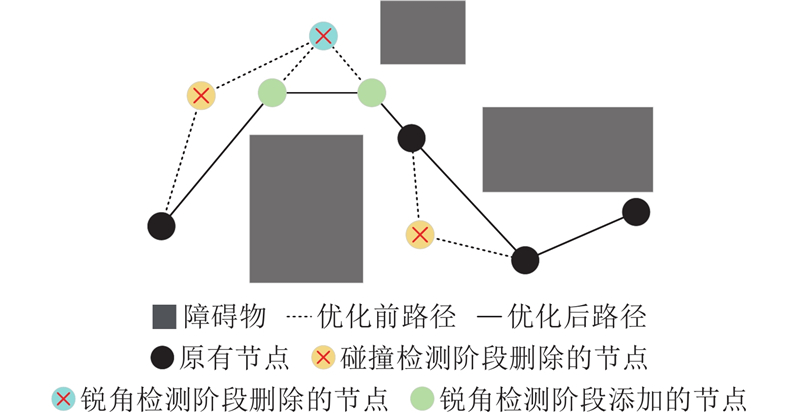
2.3.3. 路径平滑
图 9
3. 实验结果与分析
3.1. 最优路径区域预测网络模型实验
3.1.1. 实验条件
硬件配置包括Intel Core i7-13790F处理器、NVIDIA GeForce RTX 4060 Ti显卡和32 GB运行内存. 在Ubuntu 20.04操作系统上,使用Python 3.9.19编程语言,Pytorch 1.13.1深度学习框架和CUDA 11.7深度学习加速库进行开发. 在OPAPN模型中,采用预训练权重的MobileNetV2网络提取浅层特征. 其他部分的网络权重随机初始化,均值为0,方差为0.01. 在训练过程中,选择Adam作为优化器,采用余弦退火学习率调整策略. 学习率初始设定为5.0×10−4,动量系数为0.9,权重衰减系数为1.0×10−4. 批量大小设置为32. 为了增强特征提取的稳定性并加快收敛速度,将训练分为冻结训练和解冻训练2个阶段. 在冻结训练阶段中,保持MobileNetV2以及其他参数的梯度固定,在解冻训练阶段对所有权重进行更新. 冻结训练和解冻训练分别进行30个和70个迭代轮次.
3.1.2. 数据集
自建图像数据集供实验研究,该数据集包含6 950张由100张不同类型的典型环境地图生成的图像. 典型环境地图由Python的Matplotlib库绘制生成,涵盖简单开阔环境、模拟室内环境、狭窄通道环境以及复杂陷阱环境,不同场景的数据比例为2∶3∶2∶3,以确保模型在不同环境下的泛化能力. 输入图像和标签图像如图10所示. 标签图像是基于RRT算法在输入图像上运算50次获得的最优路径区域. 将标签图像中的普通区域、障碍物和最优路径区域像素值分别设为0、1和2以促进模型快速收敛. 数据集按9∶1随机分配给训练集和验证集.
图 10

图 10 训练最优路径区域预测网络模型的数据集图像
Fig.10 Images from dataset used for training optimal path area prediction network model
3.1.3. 评估指标
在预测最优路径区域任务中,任务目标与传统深度学习语义分割存在显著差异. 如图11所示,预测失败与预测成功的图像仅在标记的区域不同. 传统的评价指标如像素平均精度(mean pixel accuracy, MPA)和平均交并比(mean intersection over union, MIoU)在2张图像上的表现相似,不足以反映预测质量的差异,为此采用最优路径区域连通性作为评价指标.
图 11

图 11 预测区域连通性评价示意图
Fig.11 Illustration of predicted region connectivity evaluation
3.1.4. 实验结果分析
为了进一步验证模型在实际场景中的应用效果,构建由60张训练集中未出现过的地图组成的测试集. 这些地图覆盖从简单到复杂的多种场景(包括室内常见布局及狭长走廊),起终点位置均为随机生成. 如图12所示为OPAPN模型在此测试集上的预测结果. 可以看出,所提模型在多样化的地图上具有稳健的表现.
图 12
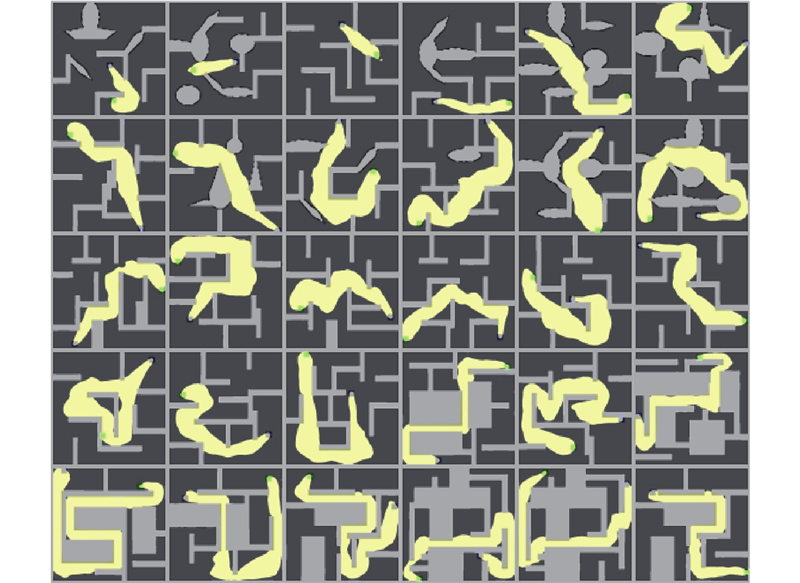
图 12 最优路径区域预测网络模型测试集预测结果
Fig.12 Test set prediction results of optimal path area prediction network model
为了全面评估OPAPN模型中各模块对路径预测性能的具体影响,针对GFE、HA、SAC以及HA中的CA和CCA进行模块消融实验. 为了准确衡量HA的贡献,将其替换为卷积块注意力模块(convolutional block attention module,CBAM)并对比模型性能变化. 为了进一步探索骨干网络对模型性能的影响,对不同骨干网络架构进行替换. 所有消融实验均在统一的环境与超参数设置下进行,实验结果如表1所示. 其中RC为预测成功率,t为推理时间,P为参数量. 基线模型去除OPAPN模型中的GFE和HA,并将SAC简化为标准卷积模块,旨在探讨传统深度学习语义分割框架在最优路径区域预测任务中的适用性. 可以看出,1)基线模型的推理时间最短,为27.54 ms,但RC=93.58%,略低于改进模型. 相比之下,使用ResNet-18[25]和ResNet-50[25]作为骨干网络的模型,推理时间增加,且预测成功率下降,说明网络复杂度的提升并未提升预测成功率. RegNet[26]尽管推理时间略有减少,但成功率仅为91.28%,仍低于基线模型. 2)将GFE、HA和SAC引入基线模型后,模型在精度和效率上实现了更好的平衡. 单独引入HA成功率提升至94.72%,推理时间略增至29.12 ms,参数量控制在5.95×106,体现出OPAPN模型在结合多种特征方面的优势. 进一步结合GFE和SAC后,模型成功率达到96.56%,推理时间和参数量分别为32.70 ms和5.57×106,显示出模块间的协同优化效果. 3)相较于CA、CCA和CBAM,HA不仅提升了路径预测的精度,且在推理时间和参数量上效率更优. 组合模块+GFE+HA+SAC在预测成功率、推理时间及参数量方面实现最优平衡,表明改进模块在最优路径区域预测任务中的重要性和实用性.
表 1 最优路径区域预测网络模型的模块消融实验结果
Tab.1
| 网络架构 | RC/% | t/ms | P/106 |
| 基线模型 | 93.58 | 27.54 | 5.81 |
| ResNet-18 | 89.59(−3.99) | 28.27 | 6.33 |
| ResNet-50 | 86.70(−6.88) | 141.50 | 17.74 |
| RegNet | 91.28(−2.30) | 26.95 | 6.33 |
| +CBAM | 94.04(+0.46) | 28.80 | 5.86 |
| +CA | 93.81(+0.23) | 27.94 | 5.84 |
| +CCA | 94.27(+0.69) | 28.96 | 5.91 |
| +HA | 94.72(+1.14) | 29.12 | 5.95 |
| +GFE | 95.18(+1.60) | 32.08 | 6.02 |
| +SAC | 94.95(+1.37) | 31.91 | 5.23 |
| +GFE+CBAM+SAC | 95.64(+2.06) | 32.13 | 5.49 |
| +GFE+HA+SAC | 96.56(+2.98) | 32.70 | 5.57 |
3.2. 改进快速探索随机树路径规划算法实验
3.2.1. 实验条件
为了验证改进RRT算法在效率和搜索性能上的提升,使用Python语言将所提算法与RRT、双向RRT(RRT-Connect)及文献[27]中的算法进行对比. RRT-Connect是基于双树拓展思想的路径规划算法,通过从起点和终点同时构建2棵随机树并进行连接尝试来提高路径搜索的效率. 李金良等[27]在传统RRT算法的基础上,通过以一定的概率将目标点作为采样点来增强搜索过程,提高了算法的搜索性能和效率. 实验环境与OPAPN模型实验环境相同,对比不同算法的收敛时间和节点数量. 为了确保实验结果的可靠性,每个算法在每张地图上均运行50次,并对收敛时间和节点数量分别取平均值. 设置拓展步长为20,目标阈值为20,最大迭代次数为100 000.
3.2.2. 仿真环境测试
对4种复杂度各异的地图进行测试,比较不同算法的性能. 路径规划的结果如图13所示. 地图1、2为简单地图,可以看出,本研究所提方法的启发式采样技术使得采样点主要集中于潜在路径存在的区域,显著减少了所需的节点数. 地图3为具有狭长通道的地图,根据OPAPN模型预测的区域引导,机器人能够迅速穿越狭窄区域,收敛时间缩短. 地图4为陷阱地图,改进算法没有陷入局部最优,并且能以极少的节点数量找到有效路径. 算法性能指标对比如表2所示,其中
图 13
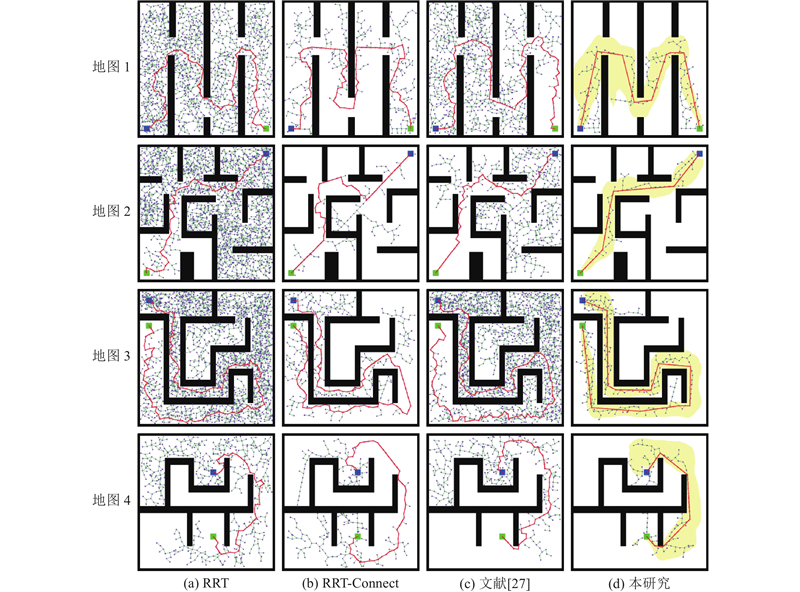
图 13 不同算法在4张仿真地图中路径规划结果对比
Fig.13 Path planning results comparison of different algorithms on four map
表 2 不同算法的路径规划性能参数对比(仿真环境测试)
Tab.2
| 地图编号 | 算法 | |||||
| 1 | RRT | 2.980 | 0.657 | 2.664 | 1 134 | 1 763 |
| RRT-Connect | 1.123 | 0.440 | 0.725 | 684 | 1 775 | |
| 文献[27] | 4.083 | 1.270 | 2.375 | 758 | 1 804 | |
| 本研究 | 0.774 | 0.473 | 0.584 | 243 | 1 304 | |
| 2 | RRT | 5.460 | 0.238 | 1.799 | 1 051 | 1 077 |
| RRT-Connect | 3.608 | 0.161 | 0.758 | 538 | 989 | |
| 文献[27] | 22.755 | 0.101 | 4.741 | 942 | 1 028 | |
| 本研究 | 0.432 | 0.205 | 0.256 | 111 | 840 | |
| 3 | RRT | 8.364 | 2.479 | 4.763 | 2 017 | 2 278 |
| RRT-Connect | 3.703 | 0.969 | 1.742 | 1 097 | 2 256 | |
| 文献[27] | 14.880 | 5.284 | 9.657 | 1 690 | 2 319 | |
| 本研究 | 1.356 | 0.676 | 0.832 | 364 | 1 832 | |
| 4 | RRT | 5.170 | 0.708 | 2.521 | 1 349 | 1 627 |
| RRT-Connect | 1.524 | 0.383 | 0.934 | 583 | 1 614 | |
| 文献[27] | 4.957 | 0.632 | 2.008 | 778 | 1 616 | |
| 本研究 | 0.912 | 0.362 | 0.515 | 203 | 1 305 |
3.2.3. 真实环境测试
为了验证所提算法在真实环境下的有效性,采用移动机器人进行算法性能对比实验. 该机器人以Nvidia AGX为主控单元,运行Ubuntu 18.04操作系统,开发平台为ROS Melodic,配备的RPLIDAR A2M12激光雷达用于环境感知. 环境地图使用Gmapping算法构建. 如图14所示为移动机器人的测试环境. 各路径规划算法的实验结果如图15所示,算法性能指标如表3所示. 所提算法比对比算法在收敛时间上缩短了17.13%~68.02%,在节点数量上减少了38.16%~65.19%,在平均路径长度上缩短了11.13%~15.51%. 实验结果说明,所提算法不仅具有较快的收敛速度,在节点数和路径长度方面也有显著提升,证明了所提算法在真实机器人平台上的应用价值.
图 14
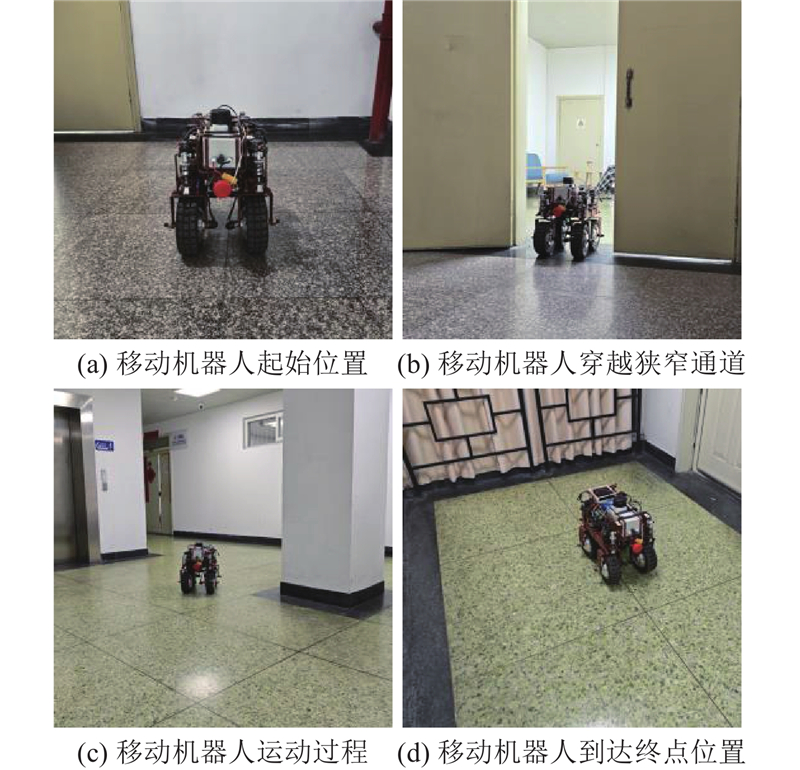
图 15
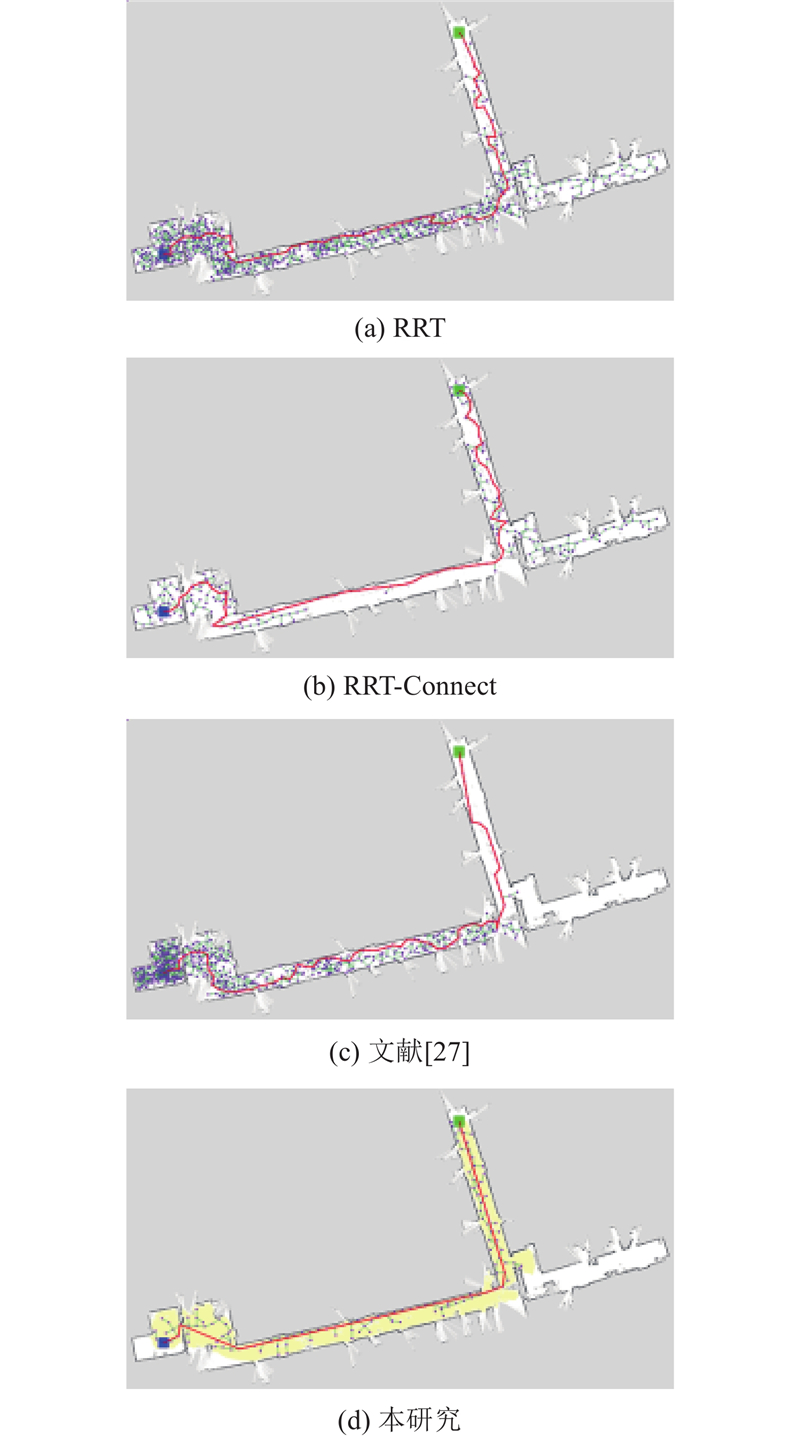
图 15 不同算法在真实环境测试中路径规划结果对比
Fig.15 Path planning results comparison of different algorithms in real-world environment testing
表 3 不同算法的路径规划性能参数对比(真实环境测试)
Tab.3
| 算法 | |||
| RRT | 1.573 | 405 | 1 498 |
| RRT-Connect | 0.607 | 228 | 1 465 |
| 文献[27] | 0.852 | 265 | 1 541 |
| 本研究 | 0.503 | 141 | 1 302 |
4. 结 语
本研究提出基于语义分割的启发式采样路径规划算法. 以环境地图及起点、终点图像为输入,集成全局特征提取模块以捕获全局障碍物布局与起终点信息,引入融合注意力模块以提高网络对地图中空间信息的关注度,在解码器部分采用可切换空洞卷积技术,在增强网络检测能力的同时减少模型计算量. 通过模块消融实验结果表明,OPAPN各模块均有效提升了区域预测的成功率. 改进后的RRT算法以OPAPN得到的最优路径区域作为启发式采样依据,有效减少了无效采样点,并通过引入双树拓展机制加速了收敛过程. 在不同复杂程度的仿真地图中对比不同算法的路径规划性能,结果显示本研究所提算法在收敛时间、节点数量和路径长度方面均表现出色. 在机器人平台上进一步验证了所提算法的实际适用性和优势. 未来研究计划1)对OPAPN的复杂度进行优化,或采用模型压缩技术以更好地适应移动端设备的需求;2)引入实时环境感知和动态障碍物检测模块,确保算法能够实时更新地图信息和路径规划策略,进一步提高算法的实用性和准确性.
参考文献
A review of mobile robot motion planning methods: from classical motion planning workflows to reinforcement learning-based architectures
[J].DOI:10.23919/JSEE.2023.000051 [本文引用: 1]
AGV路径规划及避障算法研究综述
[J].
Survey on AGV path planning and obstacle avoidance algorithms
[J].
Route planning for an autonomous robotic vehicle employing a weight-controlled particle swarm-optimized dijkstra algorithm
[J].DOI:10.1109/ACCESS.2023.3302698 [本文引用: 1]
An efficient and accurate A-star algorithm for autonomous vehicle path planning
[J].DOI:10.1109/TVT.2023.3348140 [本文引用: 1]
Dynamic obstacle-avoidance algorithm for multi-robot flocking based on improved artificial potential field
[J].
A path planning framework based on an improved weighted heuristic RRT and optimization strategy
[J].
复杂环境下基于改进Informed RRT的无人机路径规划算法
[J].
Unmanned aerial vehicle path planning algorithm based on improved informed RRT in complex environment
[J].
NR-RRT: neural risk-aware near-optimal path planning in uncertain nonconvex environments
[J].DOI:10.1109/TASE.2022.3215562 [本文引用: 1]
SVF-RRT*: a stream-based VF-RRT* for USVs path planning considering ocean currents
[J].
基于改进RRT算法的移动机器人路径规划研究
[J].
Research on path planning of mobile robot based on improved RRT algorithm
[J].
Sampling-based algorithms for optimal motion planning
[J].DOI:10.1177/0278364911406761 [本文引用: 1]
基于改进Informed-RRT*算法的舰载机甲板平面路径规划
[J].
Aircraft deck flat path planning based on improved informed-RRT* algorithm
[J].
Multi-risk-RRT: an efficient motion planning algorithm for robotic autonomous luggage trolley collection at airports
[J].DOI:10.1109/TIV.2023.3349171 [本文引用: 1]
基于深度Q网络的改进RRT路径规划算法
[J].
Improved RRT path planning algorithm based on deep Q-network
[J].
A novel direct trajectory planning approach based on generative adversarial networks and rapidly-exploring random tree
[J].DOI:10.1109/TITS.2022.3164391 [本文引用: 1]
Generative adversarial network based heuristics for sampling-based path planning
[J].DOI:10.1109/JAS.2021.1004275 [本文引用: 1]
CCNet: criss-cross attention for semantic segmentation
[J].DOI:10.1109/TPAMI.2020.3007032 [本文引用: 1]
An order-invariant and interpretable dilated convolution neural network for chemical process fault detection and diagnosis
[J].
Improved RRT global path planning algorithm based on Bridge Test
[J].DOI:10.1016/j.robot.2023.104570 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}