基于语义分割的启发式采样路径规划算法
Heuristic sampling path planning algorithm based on semantic segmentation
基于语义分割的启发式采样路径规划算法 |
| 潘嘉威,王淳立,郑秀娟,涂海燕 |
|
Heuristic sampling path planning algorithm based on semantic segmentation |
| Jiawei PAN,Chunli WANG,Xiujuan ZHENG,Haiyan TU |
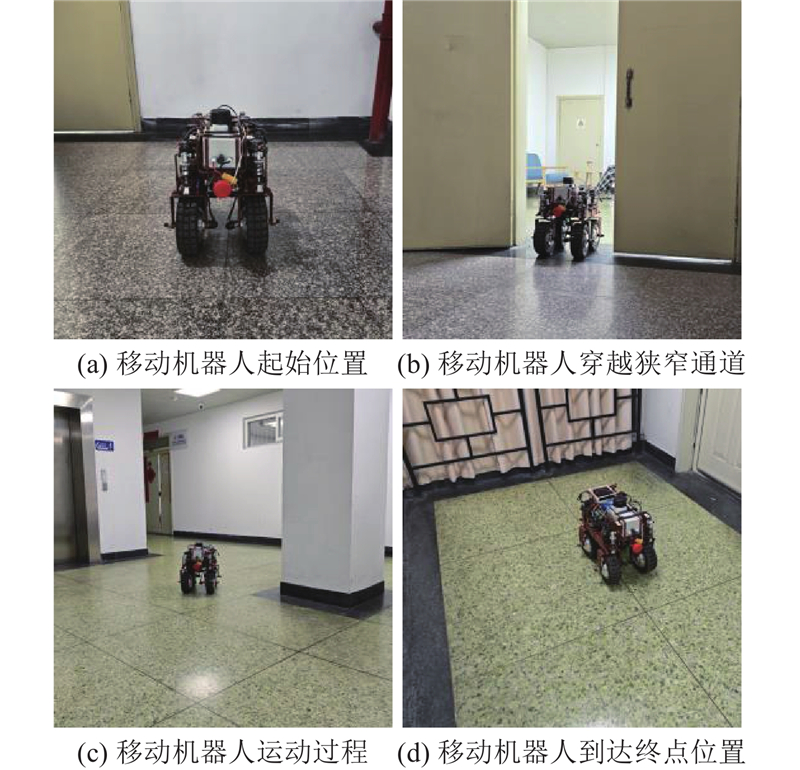
| 图 14 移动机器人的测试环境 |
| Fig.14 Test environment for mobile robot |
|
|