

在众多的新型触力觉感知装置中,基于弹性橡胶与霍尔器件构建的柔性触力觉感知装置因具有高灵敏、低迟滞、轻重量等优良特性,获得了学术界越来越多的关注. 该类型的感知装置在受到外部力刺激后输出对应的磁场信号,为了由磁场信号得到外部力刺激,Yan等[9]通过设计特制的力给定装置采集大量训练数据,利用多层神经网络得到该映射关系. Wang等[10]在考虑不同维度磁场信号拥有的强耦合特性的基础上,利用改进的最小二乘法建立从磁场信号到外部力刺激的映射关系. Tomo等[11]通过对感知装置进行针对性结构设计降低磁场信号的耦合特性,利用线性拟合工具建立复杂度相对较低的映射关系. 上述研究所提出的方法虽然能够得到有一定适用性的映射关系,但是这些方法均依据数据驱动的黑箱模型. 在这种情况下,训练样本中的异常点对于最终的训练结果会产生较大影响,导致建立的映射关系鲁棒性较差、泛化性较弱,并且不具有可解释性. 利用这类黑箱模型建立的磁场−力映射关系在航空航天、精密加工、临床医疗等复杂交互场景下并不适用,也限制了基于弹性橡胶与霍尔器件构建的柔性触力觉感知装置的实际应用与大范围推广[12].
为了克服黑箱模型的故有缺陷,建立具有高度可解释性的磁场−力映射关系,要解决的首要问题是解析计算弹性橡胶受力形变后产生的磁场. 基于Halbach阵列进行磁场解析计算的研究逐渐增多[13]. Chen等[14]利用二阶矢量势,推导由双层线式Halbach阵列组成的电动悬挂装置内部磁场的解析表达式,并利用有限元分析验证结果的正确性. Ladghem-Chikouche等[15]利用精确子域模型,推导采用环式Halbach阵列磁化的同步电机内部磁场表达式. Tang等[16]利用表面电流法,得到2个线式Halbach阵列间磁场的解析模型,并在此基础上通过虚功法得到阵列间的悬浮力. 以上研究虽然借助Halbach阵列得到了一些情形下的磁场解析表达式,但是所得到的表达式在触力觉感知领域并不适用.
针对上述问题,本研究设计带有凸起结构的柔性触力觉感知装置,基于环式Halbach阵列,提出解析计算感知装置内部磁场的方法,并且利用COMSOL Multiphysics进行磁场的有限元建模与仿真. 通过对仿真结果进行可视化表示与统计学分析,证明本研究所提方法在不同形变情形下的适用性.
1. 柔性触力觉感知装置结构设计
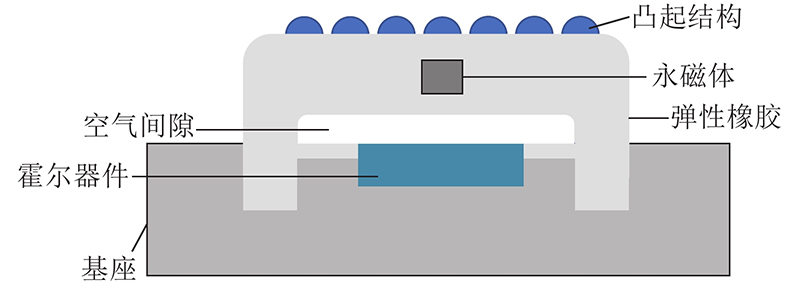
利用弹性橡胶与霍尔器件构建的柔性机器人触力觉感知装置结构示意图如图1所示. 弹性橡胶位于装置外侧,用于将外部多维度力刺激转换为多尺度位移量;永磁体嵌入弹性橡胶内部,用于将多尺度位移量转换为磁场变化量;霍尔器件固定在基座上,用于感知磁场变化量并输出. 在感知装置最外侧的半球形的凸起结构,使得弹性橡胶能够在受到外部力刺激时产生明显的形变,以提升感知灵敏度.可以看出,该柔性触力觉感知装置需要进行2个阶段的信息转换,最终以磁场变化量的形式输出信息. 解析表达这2个阶段的信息转换过程,对于建立高度可解释性的磁场−力映射关系,实现复杂交互环境下的机器人触力觉精准感知具有重要意义. 与第1阶段的信息转换过程可以依据理论较为完备的弹性力学进行求解不同,第2阶段由多尺度位移量到磁场变化量的信息转换过程可以依据的理论较少.
图 1
2. 磁场解析计算方法
为了解析表达第2阶段的信息转换过程,本研究在假设感知装置中的永磁体依照Halbach阵列排布的基础上,提出柔性触力觉感知装置受力形变后中心处磁场的解析计算方法.
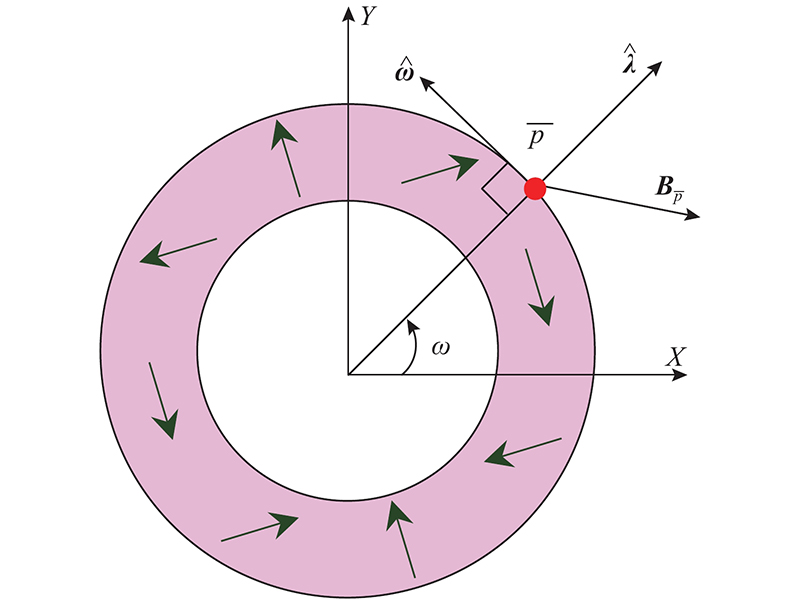
Halbach阵列是特殊的永磁体排布方式. 通过该方式排布永磁体,可以使得永磁体一侧磁场显著增强,另一侧磁场显著减弱. 按照几何特性进行分类,Halbach阵列可分为2个大类:线式、环式. 当在环式Halbach阵列中心建立如图2所示的坐标系时,可以将阵列上点
图 2
式中:
式中:
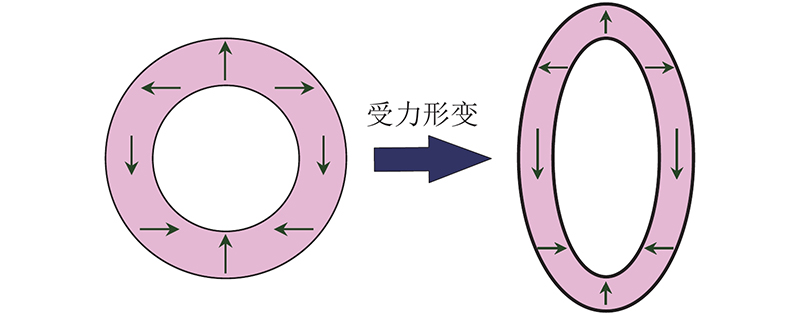
环式Halbach阵列产生的磁场具有轴向不变性,因此本研究简化空间3D环式Halbach阵列,只考虑平面2D情况. 此外,本研究假设包裹Halbach阵列的弹性橡胶在径向受到外部作用力后形变为椭圆形阵列,环式Halbach阵列受力形变的示意图如图3所示.
图 3
为了便于推导,对于阵列上点
式中:
由于永磁体按照2阶环式Halbach阵列排布,在形变前后,永磁体在垂直于XY平面的方向上均不产生极化. 根据文献[18],有
式中:
由二重积分的分部积分公式与安培环路定理有
记
记
环式Halbach阵列的阶数由式(13)中的
则
式中:
3. 磁场仿真计算模型
为了验证所提出的柔性触力觉感知装置内部磁场解析计算方法的正确性,在理论分析的基础上,借助COMSOL Multiphysics进行有限元仿真,通过比较不同形变程度下磁感应强度的仿真值与理论值,验证所提出方法的正确性.
3.1. 模型构建
构建模型须确定几何参数. 为了使得仿真结果与实际研究更加接近,通过查阅对应产品手册,并比较文献[9]~[11]构建的原型样机体积,选取环式Halbach阵列内、外圆半径分别为
在模型中心构建椭圆形Halbach阵列,其中阵列的轴向长度为20 mm,几何参数按照表1所示数据依次选取. 在材料特性方面,选取阵列材料为钕铁硼 (NdFeB)的永磁体,其剩磁强度设置为1.41 T. 在完成椭圆形阵列的构建后,在其外部构建半径为40 mm,轴向长度为40 mm的实心圆柱. 圆柱材料选取为空气,相对磁导率设置为1.
表 1 椭圆形阵列几何参数
Tab.1
| d | ai | bi | ao | bo |
| mm | ||||
| 0.10 | 3.10s | 2.90 | 4.60 | 4.40 |
| 0.20 | 3.21 | 2.80 | 4.71 | 4.30 |
| 0.30 | 3.33 | 2.70 | 4.82 | 4.20 |
| 0.40 | 3.46 | 2.60 | 4.94 | 4.10 |
| 0.50 | 3.60 | 2.50 | 5.06 | 4.00 |
| 0.60 | 3.75 | 2.40 | 5.19 | 3.90 |
| 0.70 | 3.91 | 2.30 | 5.33 | 3.80 |
| 0.80 | 4.09 | 2.20 | 5.47 | 3.70 |
| 0.90 | 4.29 | 2.10 | 5.63 | 3.60 |
| 1.00 | 4.50 | 2.00 | 5.79 | 3.50 |
| 1.10 | 4.74 | 1.90 | 5.96 | 3.40 |
| 1.20 | 5.00 | 1.80 | 6.14 | 3.30 |
| 1.30 | 5.29 | 1.70 | 6.33 | 3.20 |
| 1.40 | 5.63 | 1.60 | 6.53 | 3.10 |
| 1.50 | 6.00 | 1.50 | 6.75 | 3.00 |
图 4
3.2. 仿真结果
使用热力图对得到的仿真结果进行可视化显示,利用锥形体箭头表征磁感应强度的大小和方向. 当形变量
图 5
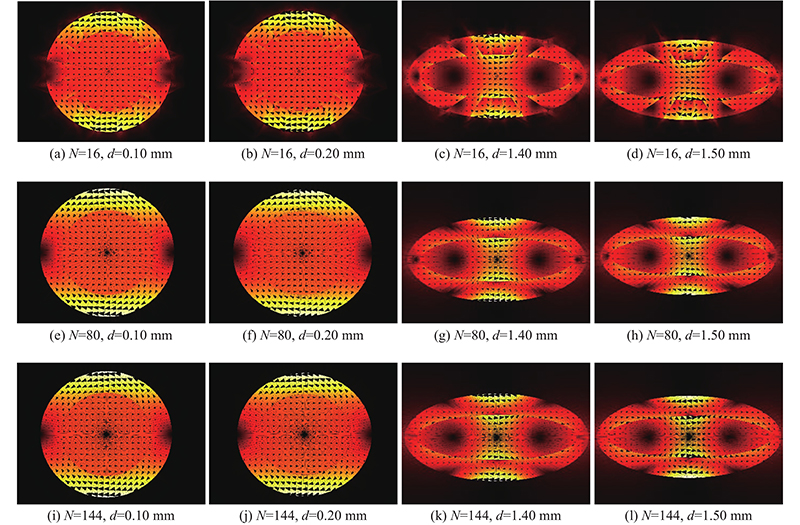
图 5 4种形变和3种等分情形下环式Halbach阵列的磁场仿真热力图
Fig.5 Heat map of magnetic field for Halbach cylinder under four different deformations and three different equal divisions
表 2 磁感应强度仿真值与理论值
Tab.2
| | | | | ||||||||
| N=16 | N=32 | N=48 | N=64 | N=80 | N=96 | N=112 | N=128 | N=144 | |||
| 0.10 | 540.14 | 551.03 | 552.52 | 553.54 | 553.32 | 553.77 | 553.89 | 553.94 | 553.90 | 572.16 | 3.18 |
| 0.20 | 541.16 | 551.57 | 553.85 | 554.38 | 554.59 | 554.72 | 554.91 | 555.00 | 555.07 | 573.60 | 3.23 |
| 0.30 | 543.58 | 554.12 | 556.08 | 556.49 | 557.08 | 557.19 | 557.36 | 557.52 | 557.75 | 576.16 | 3.20 |
| 0.40 | 546.79 | 557.38 | 559.01 | 560.24 | 560.38 | 560.73 | 560.76 | 560.94 | 560.81 | 579.99 | 3.29 |
| 0.50 | 550.85 | 561.47 | 563.56 | 564.30 | 564.60 | 564.52 | 564.86 | 564.92 | 565.02 | 585.25 | 3.46 |
| 0.60 | 557.21 | 566.69 | 569.89 | 570.76 | 571.01 | 571.15 | 571.29 | 571.30 | 571.31 | 592.13 | 3.52 |
| 0.70 | 565.92 | 576.82 | 578.92 | 579.75 | 579.87 | 580.08 | 579.92 | 580.23 | 580.48 | 600.84 | 3.39 |
| 0.80 | 575.28 | 586.54 | 588.57 | 589.37 | 589.44 | 589.60 | 589.83 | 589.90 | 589.98 | 611.62 | 3.54 |
| 0.90 | 587.83 | 599.18 | 603.12 | 602.14 | 602.42 | 602.70 | 602.67 | 602.67 | 602.72 | 624.74 | 3.46 |
| 1.00 | 602.58 | 614.23 | 616.54 | 617.39 | 617.55 | 618.15 | 617.91 | 618.02 | 618.38 | 640.50 | 3.45 |
| 1.10 | 620.49 | 632.49 | 634.79 | 635.50 | 635.96 | 636.26 | 636.14 | 636.26 | 636.48 | 659.26 | 3.46 |
| 1.20 | 641.58 | 653.93 | 656.20 | 657.08 | 657.35 | 657.83 | 657.79 | 658.04 | 657.93 | 681.43 | 3.43 |
| 1.30 | 666.77 | 679.59 | 682.13 | 683.13 | 683.35 | 683.54 | 683.64 | 683.73 | 683.75 | 707.47 | 3.35 |
| 1.40 | 695.35 | 708.90 | 711.46 | 712.31 | 712.66 | 712.82 | 713.40 | 713.34 | 713.41 | 737.94 | 3.32 |
| 1.50 | 729.39 | 743.55 | 746.09 | 747.10 | 747.75 | 747.71 | 748.19 | 748.05 | 748.10 | 773.48 | 3.27 |
在不同形变情形下,将COMSOL内置的数值法与本研究所提方法在同一台计算机上运行并记录运行时间,结果如表3所示. 所使用计算机的中央处理器为英特尔Core i7-10700,主显卡为英伟达GTX 1050 Ti,运行内存为32 GB. 可知,本研究所提出方法的计算时间
表 3 2种方法在不同形变情形下的计算时间
Tab.3
| | | | ||||||||
| N=16 | N=32 | N=48 | N=64 | N=80 | N=96 | N=112 | N=128 | N=144 | ||
| 0.10 | 13 | 21 | 34 | 51 | 73 | 109 | 150 | 186 | 242 | 0.00303 |
| 0.20 | 11 | 20 | 34 | 52 | 72 | 107 | 147 | 182 | 245 | 0.00097 |
| 0.30 | 15 | 22 | 38 | 50 | 78 | 110 | 154 | 175 | 236 | 0.00107 |
| 0.40 | 14 | 23 | 39 | 50 | 76 | 105 | 148 | 173 | 245 | 0.00080 |
| 0.50 | 13 | 22 | 33 | 50 | 74 | 106 | 146 | 184 | 247 | 0.00281 |
| 0.60 | 14 | 21 | 37 | 51 | 74 | 113 | 149 | 182 | 249 | 0.00047 |
| 0.70 | 13 | 23 | 39 | 52 | 74 | 112 | 146 | 180 | 246 | 0.00040 |
| 0.80 | 11 | 20 | 35 | 49 | 75 | 106 | 146 | 186 | 241 | 0.00040 |
| 0.90 | 14 | 21 | 39 | 49 | 74 | 114 | 148 | 185 | 253 | 0.00040 |
| 1.00 | 11 | 21 | 38 | 51 | 78 | 104 | 144 | 185 | 247 | 0.00040 |
| 1.10 | 15 | 22 | 39 | 53 | 75 | 107 | 140 | 182 | 231 | 0.00038 |
| 1.20 | 13 | 22 | 33 | 52 | 75 | 104 | 142 | 185 | 246 | 0.00037 |
| 1.30 | 15 | 17 | 39 | 52 | 77 | 97 | 145 | 186 | 251 | 0.00037 |
| 1.40 | 13 | 20 | 34 | 51 | 75 | 101 | 143 | 177 | 232 | 0.00045 |
| 1.50 | 10 | 21 | 34 | 51 | 77 | 108 | 150 | 185 | 240 | 0.00044 |
依据表2,绘制不同压缩情形下的仿真值散点图. 通过观察散点图,决定采用指数型函数拟合磁感应强度仿真值与分块数目间的关系,目标函数为
式中:
表 4 不同形变量下的拟合结果与评价指标
Tab.4
| | | | | | | RMSE |
| 0.10 | 553.70 | −62.61 | 0.91 | 0.9961 | 0.9947 | 0.3239 |
| 0.20 | 554.82 | −55.22 | 0.92 | 0.9986 | 0.9981 | 0.1967 |
| 0.30 | 557.26 | −54.40 | 0.92 | 0.9949 | 0.9932 | 0.3719 |
| 0.40 | 560.65 | −52.01 | 0.92 | 0.9952 | 0.9936 | 0.3653 |
| 0.50 | 564.73 | −55.48 | 0.92 | 0.9978 | 0.9971 | 0.2460 |
| 0.60 | 571.26 | −43.54 | 0.93 | 0.9998 | 0.9998 | 0.0715 |
| 0.70 | 580.07 | −58.07 | 0.92 | 0.9978 | 0.997 | 0.2537 |
| 0.80 | 589.70 | −61.77 | 0.91 | 0.9979 | 0.9972 | 0.2494 |
| 0.90 | 602.70 | −70.88 | 0.91 | 0.9920 | 0.9893 | 0.5094 |
| 1.00 | 617.94 | −59.11 | 0.92 | 0.9969 | 0.9958 | 0.3274 |
| 1.10 | 636.13 | −62.45 | 0.92 | 0.9975 | 0.9967 | 0.2957 |
| 1.20 | 657.70 | −63.26 | 0.92 | 0.9968 | 0.9957 | 0.3468 |
| 1.30 | 683.55 | −67.03 | 0.92 | 0.9987 | 0.9983 | 0.2298 |
| 1.40 | 713.03 | −69.82 | 0.92 | 0.9963 | 0.9951 | 0.4088 |
| 1.50 | 747.84 | −72.55 | 0.92 | 0.9969 | 0.9959 | 0.3893 |
3.3. 现象分析
由图5可知,当压缩量从0.10 mm逐渐增大到1.50 mm时,中心处的磁感应强度大小有较明显增加,而方向几乎保持不变. 在对相应物理过程进行分析后认为,造成这一结果的原因可能是压缩量的增大使得阵列上的永磁体不断接近阵列中心,引起中心处磁感应强度的增大;Halbach阵列的特殊排布形式基本抵消了中心处
4. 结 语
本研究设计了带有凸起结构的柔性触力觉感知装置,并基于环式Halbach阵列的磁场本构关系,推导了该装置在受力形变时,内部磁场的解析计算公式. 与常见的数值计算方法相比,本研究提出的磁场解析计算方法具有求解速度快、鲁棒性高、可解释性强等优势. 有限元仿真与统计学分析结果表明,本研究所提算法能够在不同情形下准确计算出感知装置中心处的磁场,能够为解决当前柔性触力觉感知装置面临的突出问题,实现复杂交互环境下的触力觉精准感知提供一定的参考作用. 限于加工精度与感测技术,本研究没有在实际场景下,检验所提出计算方法的适用性. 未来,计划将微加工技术与高精度磁场探测技术相结合,构建出感测装置的原理样机,并基于样机实测值对所提出的计算方法进行验证.
参考文献
Surgical skill assessment based on dynamic warping manipulations
[J].DOI:10.1109/TMRB.2022.3141313 [本文引用: 1]
MH-Pen: a pen-type multi-mode haptic interface for touch screens interaction
[J].
A skin-inspired organic digital mechanoreceptor
[J].DOI:10.1126/science.aaa9306 [本文引用: 1]
A bioinspired flexible organic artificial afferent nerve
[J].DOI:10.1126/science.aao0098 [本文引用: 1]
A multilayer and multimodal-fusion architecture for simultaneous recog-nition of endovascular manipulations and assessment of technical skills
[J].
机器人触觉传感器发展概述
[J].
Development of robot tactile sensor
[J].
多模态力触觉交互技术及应用
[J].DOI:10.1360/N112017-00081 [本文引用: 1]
Multi-mode haptic interaction technique and its application
[J].DOI:10.1360/N112017-00081 [本文引用: 1]
Design and experiments of a novel Halbach-cylinder-based magnetic skin: a preliminary study
[J].
Soft magnetic skin for super-resolution tactile sensing with force self-decoupling
[J].DOI:10.1126/scirobotics.abc8801 [本文引用: 2]
Design methodology for magnetic field-based soft tri-axis tactile sensors
[J].DOI:10.3390/s16091356 [本文引用: 1]
A new silicone structure for uSkin: a soft, distributed, digital 3-axis skin sensor and its integration on the humanoid robot iCub
[J].DOI:10.1109/LRA.2018.2812915 [本文引用: 2]
Learning skill characteristics from manipulations
[J].
Magnetic target linear location method using two-point gradient full tensor
[J].
A 3-D analytic-based model of a null-flux Halbach array electrodynamic suspension device
[J].
2-D semi-analytical magnetic field calculation for flat permanent-magnet linear machines using exact subdomain technique
[J].
2-D and 3-D analytical calculation of the magnetic field and levitation force between two Halbach permanent magnet arrays
[J].
Partitioned stator hybrid excitation doubly salient machine with slot Halbach PM arrays
[J].DOI:10.1109/TVT.2021.3065670 [本文引用: 1]
Strong rare earth cobalt quadrupoles
[J].DOI:10.1109/TNS.1979.4330638 [本文引用: 2]
Design of permanent multipole magnets with oriented rare earth cobalt material
[J].DOI:10.1016/0029-554X(80)90094-4 [本文引用: 1]
圆柱形橡胶试样压缩变形有限元分析的超弹性本构方程对比研究
[J].DOI:10.3969/j.issn.1000-890X.2018.10.001 [本文引用: 1]
Finite element analysis of compressive deformation for cylindrical rubber components based on hyperelastic constitutive models
[J].DOI:10.3969/j.issn.1000-890X.2018.10.001 [本文引用: 1]
Design and optimization of a novel dual-rotor hybrid PM machine for traction application
[J].DOI:10.1109/TIE.2017.2739686 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}