面向机器人触力觉感知的磁场解析与仿真
Analysis and simulation of magnetic field for robot tactile perception
面向机器人触力觉感知的磁场解析与仿真 |
| 桂美将,周小虎,谢晓亮,刘市祺,李浩,王晋利,侯增广 |
|
Analysis and simulation of magnetic field for robot tactile perception |
| Mei-jiang GUI,Xiao-hu ZHOU,Xiao-liang XIE,Shi-qi LIU,Hao LI,Jin-li WANG,Zeng-guang HOU |
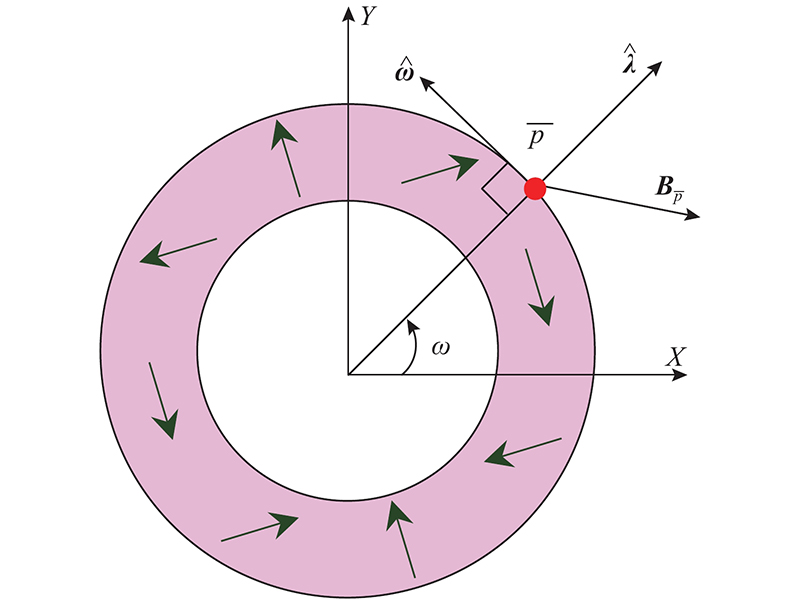
| 图 2 2阶环式Halbach阵列示意图 |
| Fig.2 Schematic diagram of second-oredr Halbach cylinder |
|
|