|
|
|
| Improved YOLOv8s lightweight small target detection algorithm of UAV aerial image |
Yahong ZHAI( ),Yaling CHEN,Longyan XU*(),Yu GONG ),Yaling CHEN,Longyan XU*(),Yu GONG |
| School of Electrical and Information Engineering, Hubei University of Automotive Technology, Shiyan 442002, China |
|
|
|
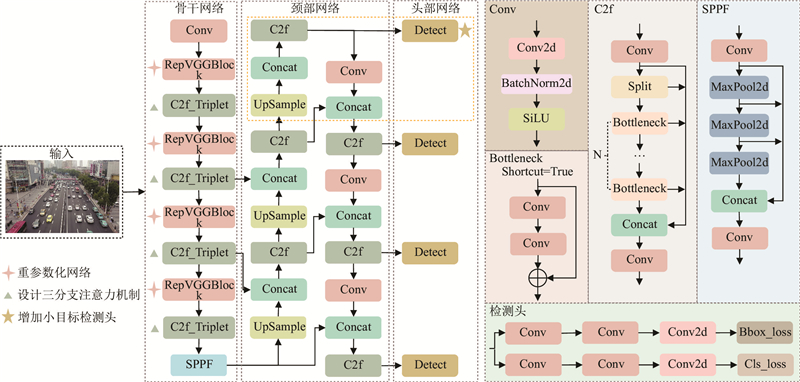
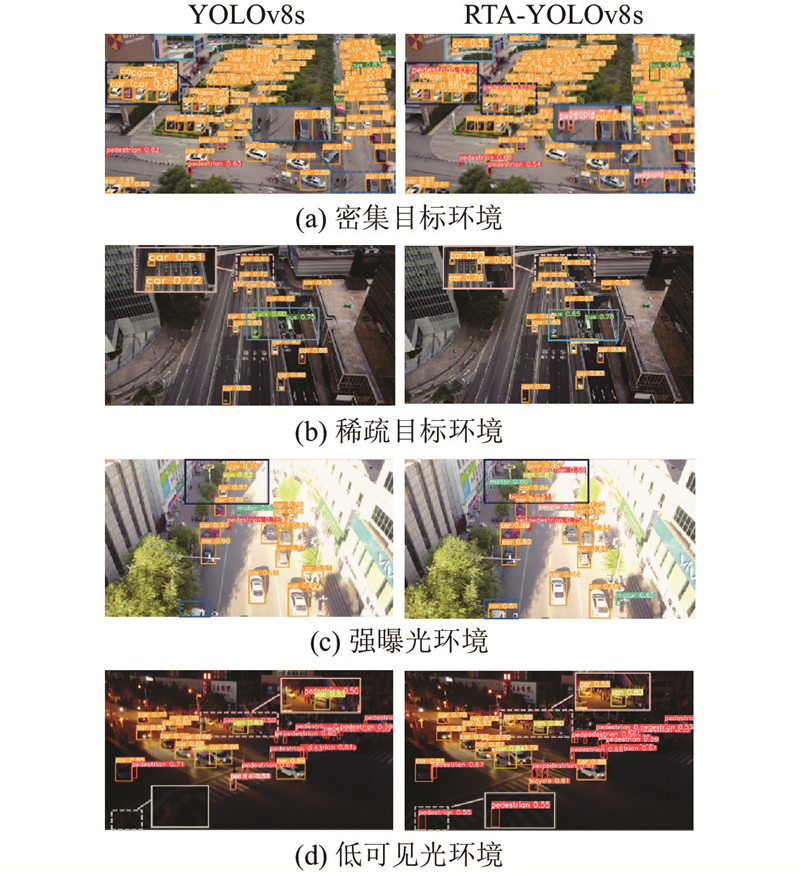
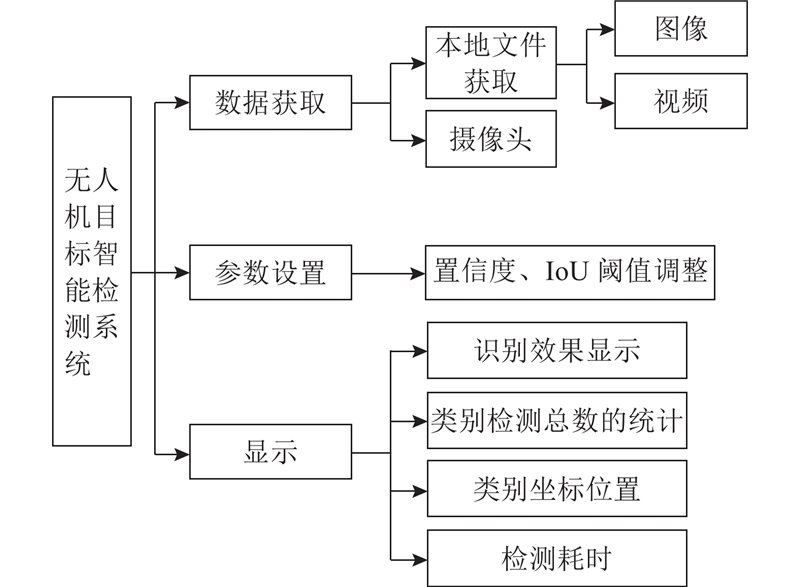
Abstract A lightweight small target detection algorithm called RTA-YOLOv8s was proposed in order to address the challenges of complex backgrounds, small target, and limited device resources in UAV images. The RepVGG module was introduced into the backbone network to enhance feature extraction capabilities. A tri-branch attention mechanism was applied to reduce false positive and false negative rates. A dedicated small target detection head was integrated to improve detection accuracy. The WIoUv3 loss function was adopted to improve localization and robustness. The experimental results showed that the RTA-YOLOv8s algorithm achieved a mAP50 of 44.9% and detection speed of 88.5 frame per second on the VisDrone dataset. mAP50 increased by 6.1%, detection accuracy increased by 4.7%, and params reduced by 13.9% compared with YOLOv8s. The improved algorithm effectively addresses the poor detection performance in complex UAV scenes, and balances accuracy and speed. The user-friendly interface design enables result visualization, making detection tasks more intuitive and easier to operate, and is suitable for UAV target detection.
|
|
Received: 16 July 2024
Published: 28 July 2025
|
|
|
| Fund: 湖北省教育厅科研计划资助项目(D202111802);湖北省科技厅重点研发计划资助项目(2022BEC008);中南民族大学信息物理融合智能计算国家民委重点实验室开放基金资助项目(CPFIC202402). |
|
Corresponding Authors:
Longyan XU
E-mail: zhaiyh_dy@huat.edu.cn;xuly_dy@huat.edu.cn
|
改进YOLOv8s的轻量级无人机航拍小目标检测算法
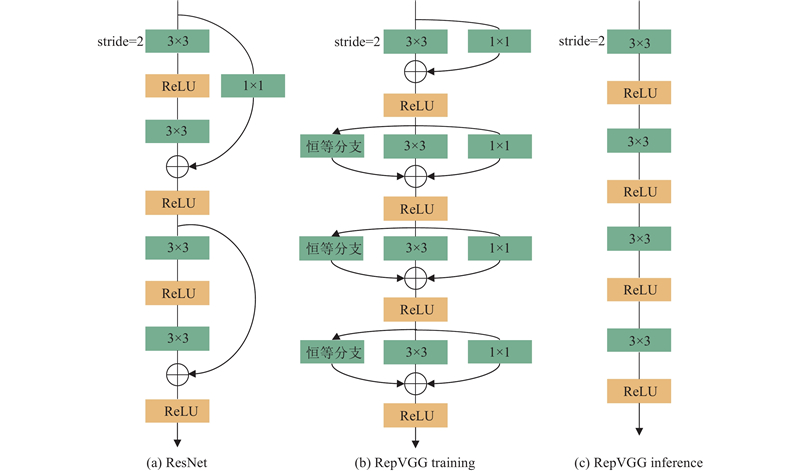
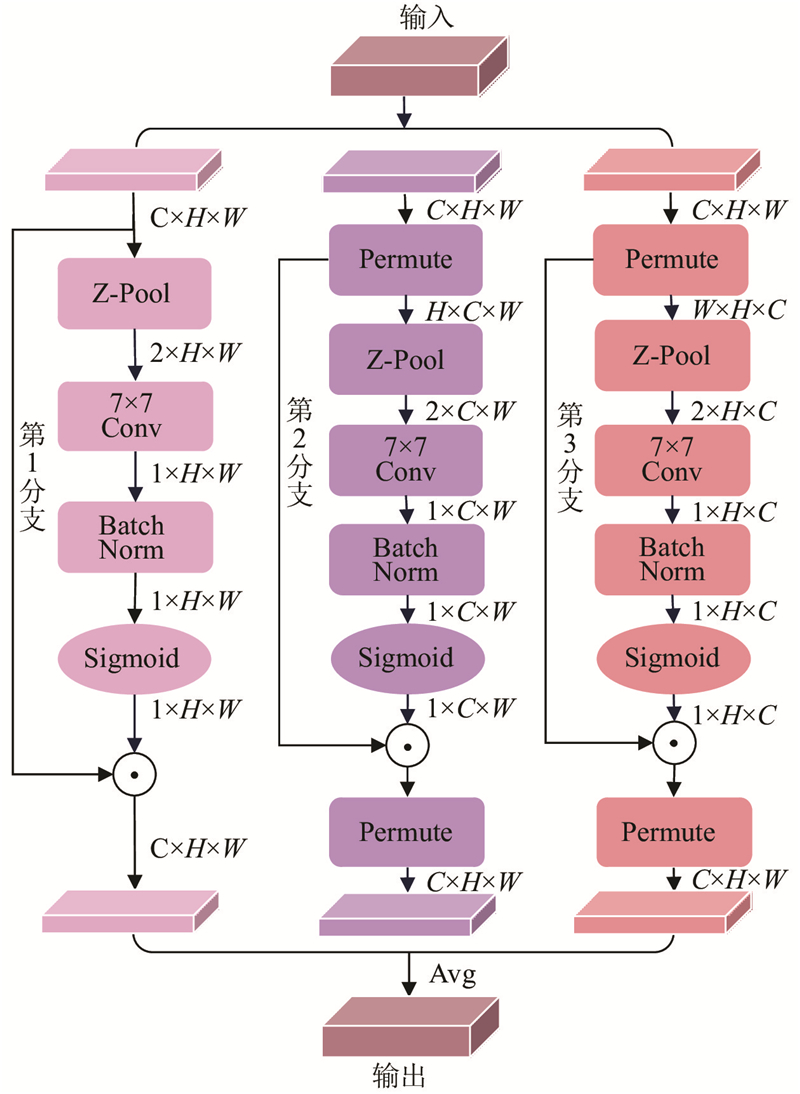
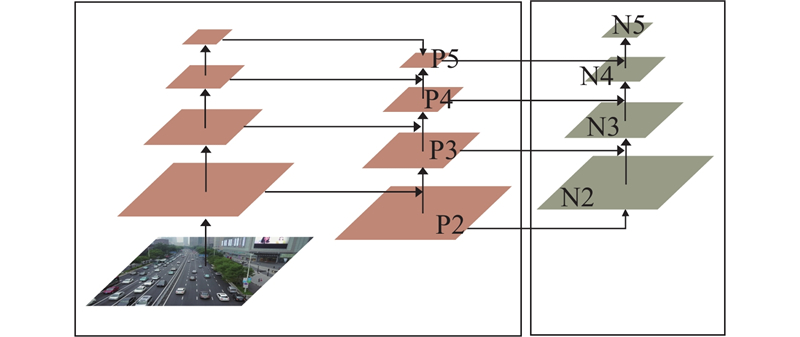
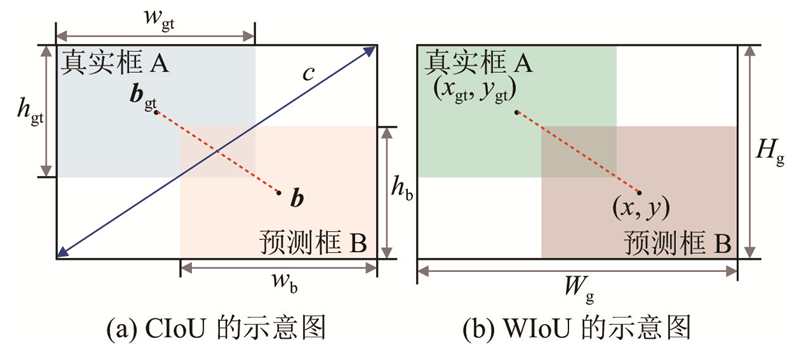
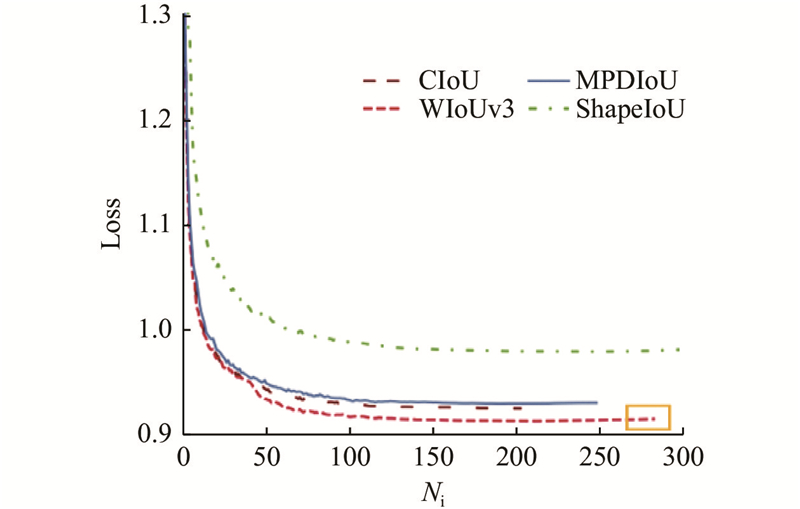
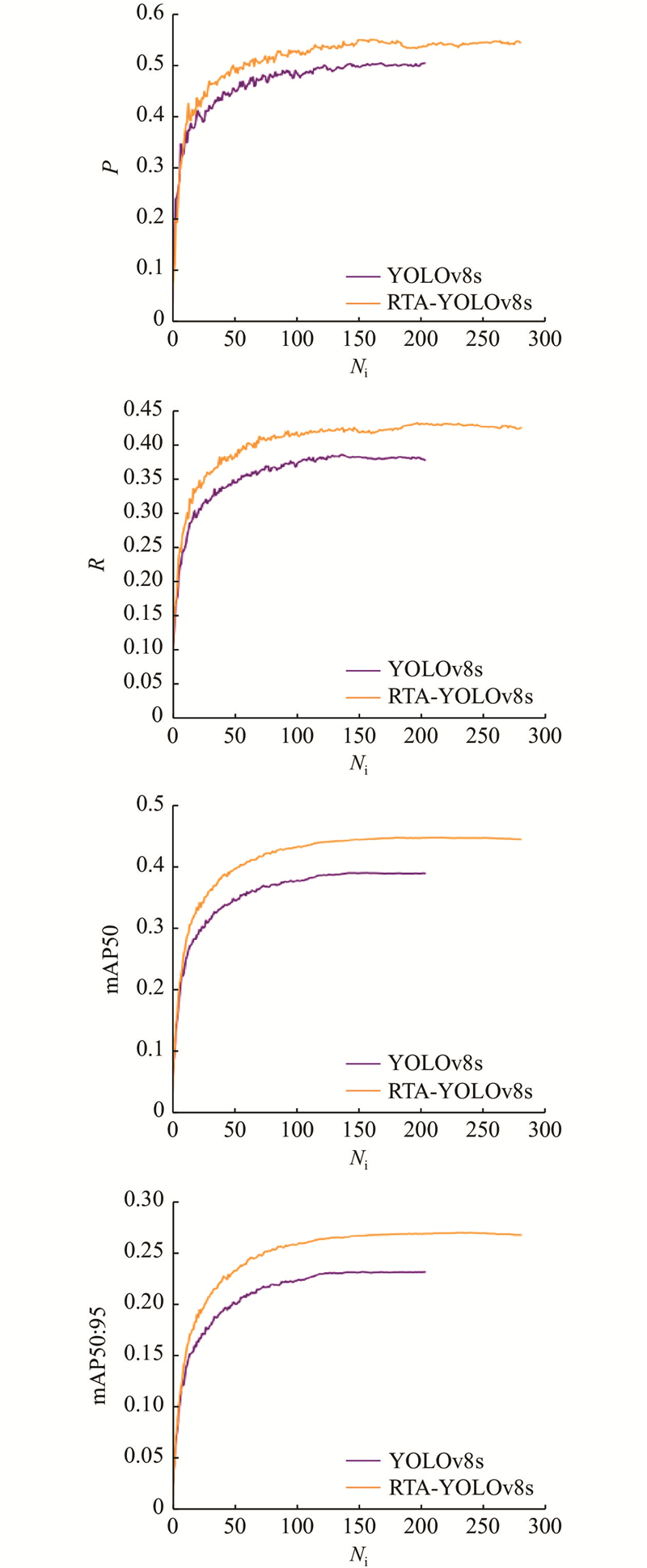
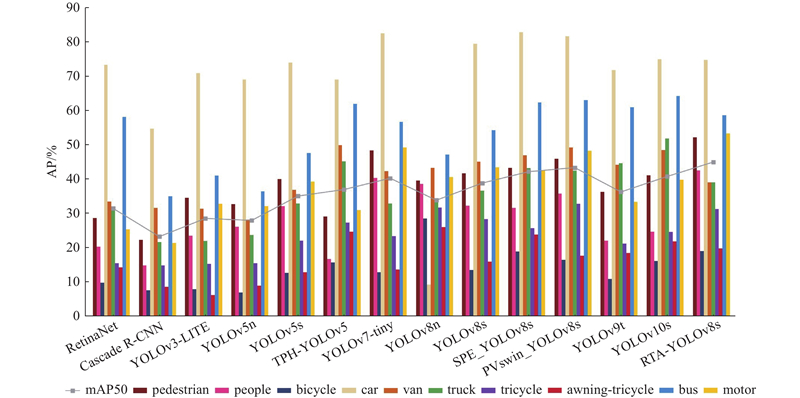
针对无人机航拍图像背景复杂、目标尺寸小及设备资源有限等问题,提出轻量化小目标检测算法RTA-YOLOv8s. 在主干网络引入RepVGG模块,增强特征提取能力. 应用三分支注意力机制,降低小目标的误检率和漏检率. 增加小目标专用检测头,提高对小目标的检测能力. 采用WIoUv3作为损失函数,提升模型的定位性能和鲁棒性. 实验结果表明,RTA-YOLOv8s算法在VisDrone数据集中的mAP50达到44.9%,检测速度达到88.5帧/s. 与基线算法YOLOv8s相比,mAP50提升了6.1%,检测准确率提高了4.7%,参数量减少了13.9%. 利用改进的算法,有效解决了复杂场景下检测效果不佳的问题,在精度和速度之间取得了很好的平衡. 设计人机界面,实现结果可视化,使检测任务更加直观且易操作,适合无人机航拍的目标检测.
关键词:
无人机(UAV),
小目标检测,
YOLOv8s,
轻量化方法,
注意力机制
|
|
| [1] |
ZRELLI I, REJEB A, ABUSULAIMAN R, et al Drone applications in logistics and supply chain management: a systematic review using latent Dirichlet allocation[J]. Arabian Journal for Science and Engineering, 2024, 49 (9): 12411- 12430
doi: 10.1007/s13369-023-08681-0
|
|
|
| [2] |
奉志强, 谢志军, 包正伟, 等 基于改进YOLOv5的无人机实时密集小目标检测算法[J]. 航空学报, 2023, 44 (7): 251- 265
FENG Zhiqiang, XIE Zhijun, BAO Zhengwei, et al Real-time dense small object detection algorithm for UAV based on improved YOLOv5[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (7): 251- 265
|
|
|
| [3] |
WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: trainable bag-of-freebies sets new state-of-the-art for real-time object detectors [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver: IEEE, 2023: 7464-7475.
|
|
|
| [4] |
ZHU X K, LYU S C, WANG X, et al. TPH-YOLOv5: improved YOLOv5 based on transformer prediction head for object detection on drone-captured scenarios [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops. Montreal: IEEE, 2021: 2778-2788.
|
|
|
| [5] |
WANG G, CHEN Y F, AN P, et al UAV-YOLOv8: a small-object-detection model based on improved YOLOv8 for UAV aerial photography scenarios[J]. Sensors, 2023, 23 (16): 7190
doi: 10.3390/s23167190
|
|
|
| [6] |
LI Y T, FAN Q S, HUANG H S, et al A modified YOLOv8 detection network for UAV aerial image recognition[J]. Drones, 2023, 7 (5): 304
doi: 10.3390/drones7050304
|
|
|
| [7] |
SHAO Y F, YANG Z X, LI Z H, et al Aero-YOLO: an efficient vehicle and pedestrian detection algorithm based on unmanned aerial imagery[J]. Electronics, 2024, 13 (7): 1190
doi: 10.3390/electronics13071190
|
|
|
| [8] |
XU L Y, ZHAO Y F, ZHAI Y H, et al Small object detection in UAV images based on YOLOv8n[J]. International Journal of Computational Intelligence Systems, 2024, 17 (1): 1- 9
doi: 10.1007/s44196-023-00380-w
|
|
|
| [9] |
SUI J C, CHEN D K, ZHENG X, et al A new algorithm for small target detection from the perspective of unmanned aerial vehicles[J]. IEEE Access, 2024, 12 (99): 29690- 29697
|
|
|
| [10] |
刘树东, 刘业辉, 孙叶美, 等 基于倒置残差注意力的无人机航拍图像小目标检测[J]. 北京航空航天大学学报, 2023, 49 (3): 514- 524
LIU Shudong, LIU Yehui, SUN Yemei, et al Small object detection in UAV aerial images based on inverted residual attention[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49 (3): 514- 524
|
|
|
| [11] |
潘玮, 韦超, 钱春雨, 等 面向无人机视角下小目标检测的YOLOv8s改进模型[J]. 计算机工程与应用, 2024, 60 (9): 142- 150
PAN Wei, WEI Chao, QIAN Chunyu, et al Improved YOLOv8s model for small object detection from perspective of drones[J]. Computer Engineering and Applications, 2024, 60 (9): 142- 150
doi: 10.3778/j.issn.1002-8331.2312-0043
|
|
|
| [12] |
邓天民, 程鑫鑫, 刘金凤, 等 基于特征复用机制的航拍图像小目标检测算法[J]. 浙江大学学报: 工学版, 2024, 58 (3): 437- 448
DENG Tianming, CHENG Xinxin, LIU Jinfeng, et al Small target detection algorithm for aerial images based on feature reuse mechanism[J]. Journal of Zhejiang University: Engineering Science, 2024, 58 (3): 437- 448
|
|
|
| [13] |
LIU S, QI L, QIN H F. et al. Path aggregation network for instance segmentation [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Salt Lake City: IEEE, 2018: 8759-8768.
|
|
|
| [14] |
LIN T Y, DOLLAR P, CIRSHICK R, et al. Feature pyramid networks for object detection [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 936-944.
|
|
|
| [15] |
DING X H, ZHANG X Y, MA N N, et al. Repvgg: making VGG-style convnets great again [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Nashville: IEEE, 2021: 13733-13742.
|
|
|
| [16] |
MISRA D, NALAMADA T, ARASANIPALAI A U, et al. Rotate to attend: convolutional triplet attention module [C]// Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision. Waikoloa: IEEE, 2021: 3138-3147.
|
|
|
| [17] |
TONG Z J, CHEN Y H, XU Z W, et al. Wise-IoU: bounding box regression loss with dynamic focusing mechanism [EB/OL]. (2023-04-08) [2024-07-13]. https://arxiv.org/pdf/2301.10051.
|
|
|
| [18] |
DU D, ZHU P F, WEN L Y, et al. VisDrone-DET2019: the vision meets drone object detection in image challenge results [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops. Seoul: IEEE, 2019: 213-226.
|
|
|
| [19] |
YU W P, YANG T, CHEN C. Towards resolving the challenge of long-tail distribution in UAV images for object detection [C]// Proceedings of the IEEE Winter Conference on Applications of Computer Vision. Waikoloa: IEEE, 2021: 3258-3267.
|
|
|
| [20] |
ZHAO H P, ZHOU Y, ZHANG L, et al Mixed YOLOv3-LITE: a lightweight real-time object detection method[J]. Sensors, 2020, 20 (7): 1861
doi: 10.3390/s20071861
|
|
|
| [21] |
杨永刚, 谢睿夫, 龚泽川 改进YOLOv7-tiny的无人机目标检测算法[J]. 计算机工程与应用, 2024, 60 (6): 121- 129
YANG Yonggang, XIE Ruifu, GONG Zechuan Improved YOLOv7-tiny UAV target detection algorithm[J]. Computer Engineering and Applications, 2024, 60 (6): 121- 129
doi: 10.3778/j.issn.1002-8331.2307-0316
|
|
|
| [22] |
冯迎宾, 郭枭尊, 晏佳华. 基于多尺度注意力机制的无人机小目标检测算法[EB/OL]. (2024-08-02)[2024-08-11]. http://www.co-journal.com/CN/10.12382/bgxb.2023.1124.
FENG Yingbin, GUO Xiaozun, YAN Jiahua. UVA small target detection algorithm based on multi-scale attention mechanism [EB/OL]. (2024-08-02)[2024-08-11]. http://www.co-journal.com/ CN/10.12382/bgxb.2023.1124.
|
|
|
| [23] |
TAHIR N U A, LONG Z, ZHANG Z, et al PVswin-YOLOv8s: UAV-based pedestrian and vehicle detection for traffic management in smart cities using improved YOLOv8[J]. Drones, 2024, 8 (3): 84
doi: 10.3390/drones8030084
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|