|
|
|
| Dual-neighborhood graph convolution method for point cloud understanding |
Zongmin LI1,2( ),Chang XU1,Yun BAI1,Shiyang XIAN1,Guangcai RONG1 ),Chang XU1,Yun BAI1,Shiyang XIAN1,Guangcai RONG1 |
1. College of Computer Science and Technology, Qingdao Institute of Software, China University of Petroleum (East China), Qingdao 266580, China
2. Information Engineering College, Qingdao Binhai University, Qingdao 266580, China |
|
|
|
Abstract A dual-neighborhood graph convolutional network (DNGCN) was proposed in order to address the limitations of existing methods in modeling local point cloud structures with restricted spatial spans and the information loss caused by conventional feature aggregation strategies. Angular priors were incorporated into raw point coordinates in order to enhance geometric awareness for capturing fine-grained local structures. A dual-neighborhood graph convolution operator that integrated Gaussian adaptive aggregation was designed by extending the original neighborhood, enabling simultaneous extraction of salient features from enlarged receptive fields and preservation of intricate local details. A local-global cross-scale interaction mechanism was introduced to expand spatial perception spans and model long-range dependencies. The proposed method achieved an overall classification accuracy of 94.1% on ModelNet40 and 89.6% on ScanObjectNN, significantly outperforming other advanced algorithms. The increases were 1.2% and 11.5% respectively compared with DGCNN. Excellent performance was obtained on the ShapeNetPart dataset for part segmentation, as well as the ScanNetv2 and S3DIS datasets for semantic segmentation, with mean IoU scores of 86.7%, 74.9% and 69.8%, respectively. Experiments proved the effectiveness of the model.
|
|
Received: 03 July 2024
Published: 25 April 2025
|
|
|
| Fund: 国家重点研发计划资助项目(2019YFF0301800); 国家自然科学基金资助项目(61379106); 山东省自然科学基金资助项目(ZR2013FM036, ZR2015FM011). |
面向点云理解的双邻域图卷积方法
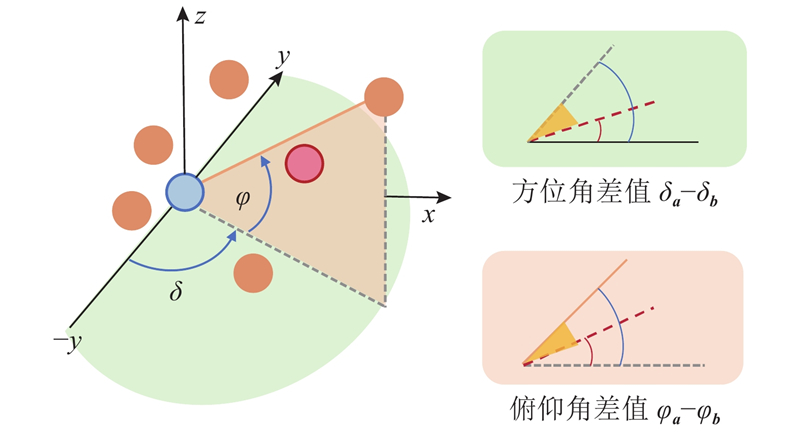
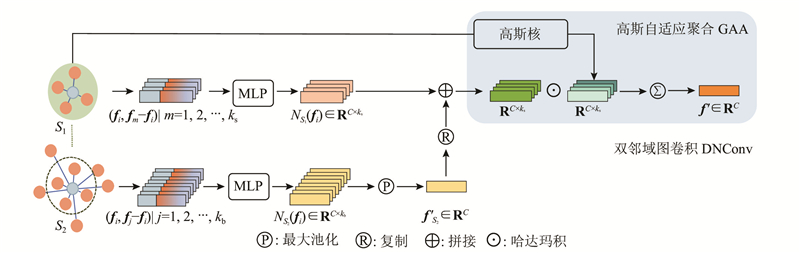
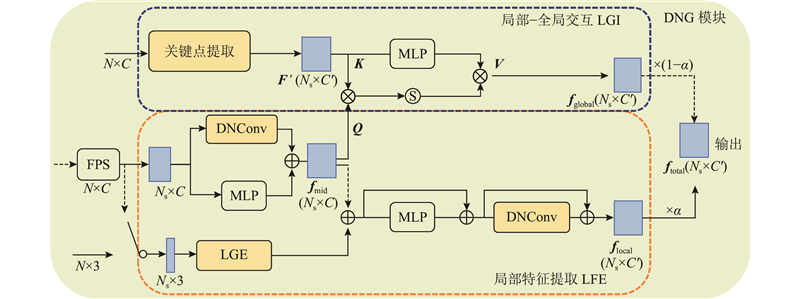
针对现有方法对局部点云结构建模时空间跨度有限以及传统特征聚合方法造成一定信息损失的问题,提出双邻域图卷积网络(DNGCN). 在原始点云中增加角度先验,以增强对点云局部几何结构的理解,捕捉局部细节. 对原始邻域进行扩展,在局域内设计双邻域图卷积,通过集成高斯自适应聚合,在提取较大感受野范围内显著特征的同时,充分保留原始邻域信息. 通过局部-全局信息交互来增大局部点的空间跨度,捕获远距离依赖关系. 本文方法在分类数据集ModelNet40和ScanObjectNN上分别取得了94.1%、89.6%的总体精度,与其他先进算法相比有显著提升,较DGCNN分别提升了1.2%、11.5%. 在部件分割数据集ShapeNetPart和语义分割数据集ScanNetv2、S3DIS上均获得优秀的性能,平均交并比分别为86.7%、74.9%和69.8%. 通过大量的实验,证明了该模型的有效性.
关键词:
点云特征,
图卷积网络,
几何增强,
局部全局交互,
注意力机制
|
|
| [1] |
JABOVEDOFF M, OPPIKOFER T, ABELLÁN A, et al Use of LIDAR in landslide investigations: a review[J]. Natural Hazards, 2012, 61 (1): 5- 28
doi: 10.1007/s11069-010-9634-2
|
|
|
| [2] |
RUSU R B, MARTON Z C, BLODOW N, et al Towards 3D point cloud based object maps for household environments[J]. Robotics and Autonomous Systems, 2008, 56 (11): 927- 941
doi: 10.1016/j.robot.2008.08.005
|
|
|
| [3] |
QI C R, LIU W, WU C, et al. Frustum pointnets for 3d object detection from rgb-d data [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Salt Lake City: IEEE, 2018: 918-927.
|
|
|
| [4] |
FAN H, SU H, GUIBAS L J. A point set generation network for 3d object reconstruction from a single image [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Honolulu: IEEE, 2017: 605-613.
|
|
|
| [5] |
SU H, MAJI S, KALOGERAKIS E, et al. Multi-view convolutional neural networks for 3d shape recognition [C]// Proceedings of the IEEE International Conference on Computer Vision . Santiago: IEEE, 2015: 945-953.
|
|
|
| [6] |
LI Y, PIRK S, SU H, et al Fpnn: field probing neural networks for 3d data[J]. Advances in Neural Information Processing Systems, 2016, 29: 307- 315
|
|
|
| [7] |
QI C R, SU H, MO K, et al. Pointnet: deep learning on point sets for 3d classification and segmentation [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Honolulu: IEEE, 2017: 652-660.
|
|
|
| [8] |
QI C R, YI L, SU H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space [C] // Proceedings of the 30th International Conference on Neural Information Processing Systems. Cambridge: MIT Press, 2017: 5099-5108.
|
|
|
| [9] |
LIU Y C, FAN B, XIANG S M, et al. Relation-shape convolutional neural network for point cloud analysis [C] // Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Long Beach: IEEE, 2019: 8895–8904.
|
|
|
| [10] |
HU Q Y, YANG B, XIE L H, et al. Randla-net: efficient semantic segmentation of large-scale point clouds [C] // Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Seattle: IEEE, 2020: 11108–11117.
|
|
|
| [11] |
YAN X, ZHENG C, LI Z, et al. Pointasnl: robust point clouds processing using nonlocal neural networks with adaptive sampling [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Seattle: IEEE, 2020: 5589-5598.
|
|
|
| [12] |
ZHAO H, JIANG L, FU C W, et al. Pointweb: enhancing local neighborhood features for point cloud processing [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Long Beach: IEEE, 2019: 5565-5573.
|
|
|
| [13] |
WANG Y, SUN Y, LIU Z, et al Dynamic graph CNN for learning on point clouds[J]. ACM Transactions on Graphics, 2019, 38 (5): 1- 12
|
|
|
| [14] |
SIMONOVSKY M, KOMODAKIS N. Dynamic edge-conditioned filters in convolutional neural networks on graphs [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Honolulu: IEEE, 2017: 3693-3702.
|
|
|
| [15] |
LIU Z, ZHOU S, SUO C, et al. Lpd-net: 3d point cloud learning for large-scale place recognition and environment analysis [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . Seoul: IEEE, 2019: 2831-2840.
|
|
|
| [16] |
LAI X, LIU J, JIANG L, et al. Stratified transformer for 3d point cloud segmentation [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . New Orleans: IEEE, 2022: 8500-8509.
|
|
|
| [17] |
WU W, QI Z, FUXIN L. Pointconv: deep convolutional networks on 3d point clouds [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Long Beach: IEEE, 2019: 9621-9630.
|
|
|
| [18] |
THOMAS H, QI C R, DESCHAUD J E, et al. Kpconv: flexible and deformable convolution for point clouds [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision. Seoul: IEEE, 2019: 6411-6420.
|
|
|
| [19] |
XU M, DING R, ZHAO H, et al. Paconv: position adaptive convolution with dynamic kernel assembling on point clouds [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Nashville: IEEE, 2021: 3173-3182.
|
|
|
| [20] |
QIU S, ANWAR S, BARNES N Geometric back-projection network for point cloud classification[J]. IEEE Transactions on Multimedia, 2021, 24: 1943- 1955
|
|
|
| [21] |
RAN H, LIU J, WANG C. Surface representation for point clouds [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. New Orleans: IEEE, 2022: 18942-18952.
|
|
|
| [22] |
ZHANG R, WANG L, WANG Y, et al. Starting from non-parametric networks for 3D point cloud analysis [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver: IEEE, 2023: 5344-5353.
|
|
|
| [23] |
CHEN B, XIA Y, ZANG Y, et al. Decoupled local aggregation for point cloud learning [EB/OL]. (2023-08-31). https://doi.org/10.48550/arXiv.2308.16532.
|
|
|
| [24] |
DEFFERRARD M, BRESSON X, VANDERGHEYNST P Convolutional neural networks on graphs with fast localized spectral filtering[J]. Advances in Neural Information Processing Systems, 2016, 29: 3844- 3852
|
|
|
| [25] |
LI G, MULLER M, THABET A, et al. Deepgcns: can gcns go as deep as cnns? [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision. Seoul: IEEE 2019: 9267-9276.
|
|
|
| [26] |
LIN Z H, HUANG S Y, WANG Y C F. Convolution in the cloud: learning deformable kernels in 3d graph convolution networks for point cloud analysis [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Seattle: IEEE, 2020: 1800-1809.
|
|
|
| [27] |
XU M, ZHOU Z, QIAO Y. Geometry sharing network for 3d point cloud classification and segmentation [C]// Proceedings of the AAAI Conference on Artificial Intelligence . Palo Alto: AAAI Press, 2020, 34(7): 12500-12507.
|
|
|
| [28] |
ZHOU H, FENG Y, FANG M, et al. Adaptive graph convolution for point cloud analysis [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . Montreal: IEEE, 2021: 4965-4974.
|
|
|
| [29] |
VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need [C]// Proceedings of the 31st International Conference on Neural Information Processing Systems . Long Beach: Curran Associates Inc., 2017: 6000-6010.
|
|
|
| [30] |
GUO M H, CAI J X, LIU Z N, et al Pct: Point cloud transformer[J]. Computational Visual Media, 2021, 7 (2): 187- 199
doi: 10.1007/s41095-021-0229-5
|
|
|
| [31] |
ZHAO H, JIANG L, JIA J, et al. Point transformer [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision. Montreal: IEEE, 2021: 16259-16268.
|
|
|
| [32] |
PARK J, LEE S, KIM S, et al. Self-positioning point-based transformer for point cloud understanding [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Vancouver: IEEE, 2023: 21814-21823.
|
|
|
| [33] |
RAN H, ZHUO W, LIU J, et al. Learning inner-group relations on point clouds [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . Montreal: IEEE, 2021: 15477-15487.
|
|
|
| [34] |
WU X Y, JIANG L, WANG P S, et al. Point Transformer V3: simpler, faster, stronger [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Seattle: IEEE, 2024: 4840-4851.
|
|
|
| [35] |
WU Z, SONG S, KHOSLA A, et al. 3d shapenets: a deep representation for volumetric shapes [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Los Alamitos: IEEE, 2015: 1912-1920.
|
|
|
| [36] |
UY M A, PHAM Q H, HUA B S, et al. Revisiting point cloud classification: a new benchmark dataset and classification model on real-world data [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision. Seoul: IEEE, 2019: 1588-1597.
|
|
|
| [37] |
YI L, KIM V G, CEYLAN D, et al A scalable active framework for region annotation in 3d shape collections[J]. ACM Transactions on Graphics, 2016, 35 (6): 1- 12
|
|
|
| [38] |
DAI A, CHANG A X, SAVVA M, et al. ScanNet: richly-annotated 3D reconstructions of indoor scenes [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 2432-2443.
|
|
|
| [39] |
ARMENI I, SENER O, ZAMIR A R, et al. 3d semantic parsing of large-scale indoor spaces [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 1534-1543.
|
|
|
| [40] |
CHOE J, PARK C, RAMEAU F, et al. Pointmixer: Mlp-mixer for point cloud understanding [C]// European Conference on Computer Vision. Cham: Springer, 2022: 620-640.
|
|
|
| [41] |
MUZAHID A A M, WAN W, SOHEL F, et al CurveNet: curvature-based multitask learning deep networks for 3D object recognition[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 8 (6): 1177- 1187
|
|
|
| [42] |
QIAN G, LI Y, PENG H, et al. Pointnext: revisiting pointnet++ with improved training and scaling strategies [J]. Advances in Neural Information Processing Systems , 2022: 23192-23204.
|
|
|
| [43] |
MONTANARO A, VALSESIA D, MAGLI E Rethinking the compositionality of point clouds through regularization in the hyperbolic space[J]. Advances in Neural Information Processing Systems, 2022, 35: 33741- 33753
|
|
|
| [44] |
LIU Y, TIAN B, LV Y, et al Point cloud classification using content-based transformer via clustering in feature space[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 11: 231- 239
|
|
|
| [45] |
WOO S, LEE D, HWANG S, et al MKConv: multidimensional feature representation for point cloud analysis[J]. Pattern Recognition, 2023, 143: 109800
doi: 10.1016/j.patcog.2023.109800
|
|
|
| [46] |
MA X, QIN C, YOU H X, et al. Rethinking network design and local geometry in point cloud: a simple residual MLP framework [EB/OL]. (2022-02-15). https://doi.org/10.48550/arXiv.2202.07123.
|
|
|
| [47] |
ZEID K A, SCHULT J, HERMANS A, et al. Point2Vec for self-supervised representation learning on point clouds [C]// DAGM German Conference on Pattern Recognition . Cham: Springer, 2023: 131-146.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|