|
|
|
| Improved slime mould bee colony algorithm for multi-UAVs cooperative path planning |
Hui XIONG1,2( ),Banglu GE1,2,Jinzhen LIU1,2,Jiaxing WANG3 ),Banglu GE1,2,Jinzhen LIU1,2,Jiaxing WANG3 |
1. School of Control Science and Engineering, Tiangong University, Tianjin 300387, China
2. Tianjin Key Laboratory of Intelligent Control of Electrical Equipment, Tiangong University, Tianjin 300387, China
3. Shenyang Aircraft Design and Research Institute, Aviation Industry Corporation of China, Shenyang 110000, China |
|
|
|
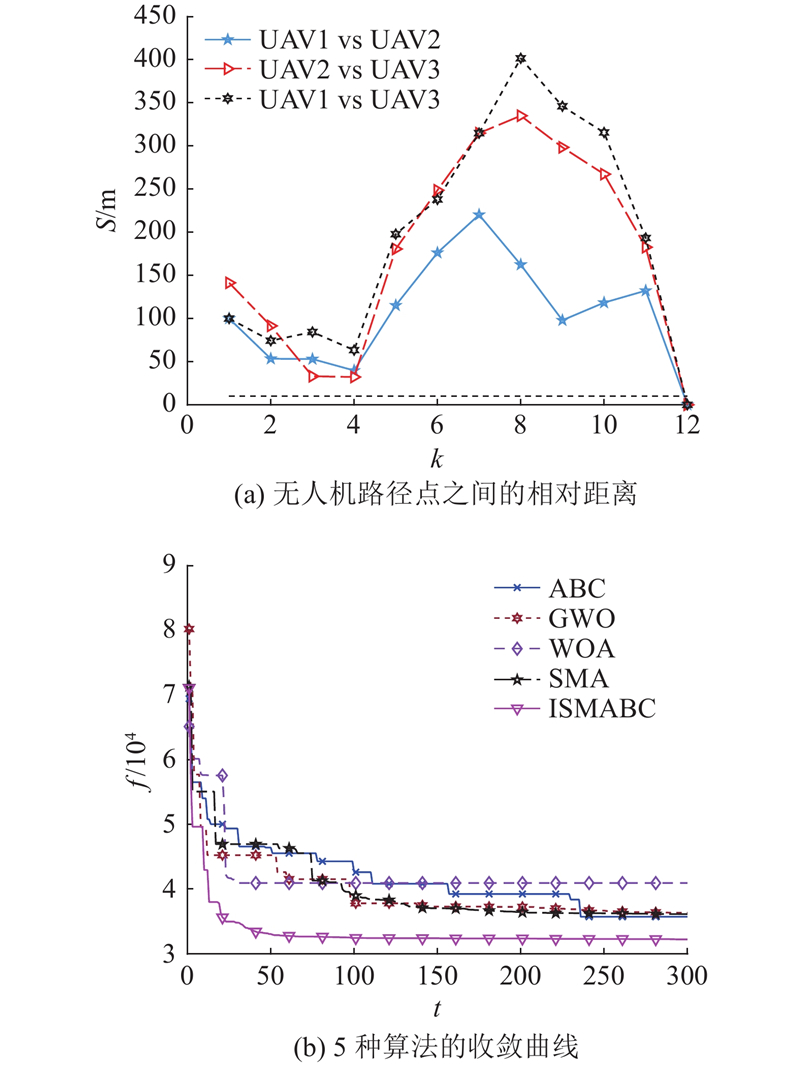
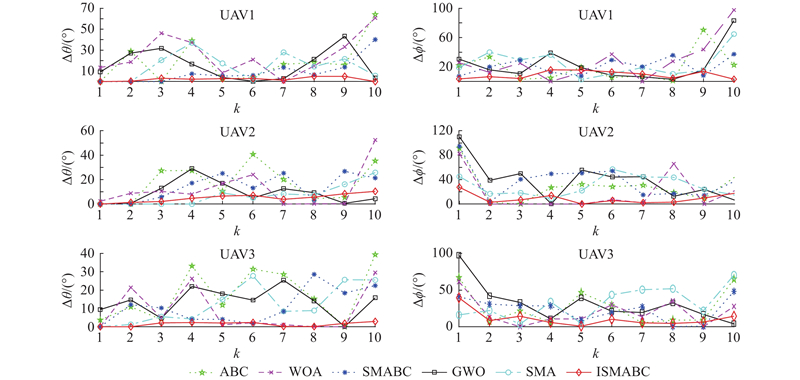
Abstract An improved slime mold algorithm with artificial bee colony (ISMABC) was proposed aiming at the problem of cooperative path planning for multiple unmanned aerial vehicles (UAVs). A path planning cost model was established, and the path planning problem in a three-dimensional environment was transformed into an optimization problem by introducing a fitness function and constraint conditions, which was solved by the proposed algorithm to obtain the optimal path. The slime mold algorithm was improved by employing the good point set strategy and a nonlinear convergence factor. Then the population diversity was increased, and the convergence speed of the algorithm was accelerated. An elite opposition-based learning strategy was applied to the global best individual in order to enhance population quality. A global best position guidance was introduced based on the exploration capability of the artificial bee colony in order to improve the exploitation capability of the slime mold algorithm. Comparative analysis of optimization on 14 test functions and some functions from the CEC2017 test suite showed that the optimization ability and convergence speed of the ISMABC algorithm were significantly enhanced. The algorithm was applied to solve the problem of cooperative path planning for multiple UAVs in order to verify the feasibility of the ISMABC algorithm. Comparative analysis shows that the ISMABC algorithm can be used to plan paths with minimal cost that satisfies the constraints for each UAV.
|
|
Received: 11 March 2024
Published: 28 July 2025
|
|
|
| Fund: 国家自然科学基金资助项目(62071329). |
用于多无人机协同路径规划的改进黏菌蜂群算法
针对多无人机(UAV)协同路径规划的问题,提出改进黏菌人工蜂群算法(ISMABC). 建立路径规划代价模型,通过引入适应度函数和约束条件,将三维环境中的路径规划问题转化为优化问题,利用所提算法求解模型,获得最优路径. 采用佳点集策略和非线性收敛因子,对黏菌算法进行改进,在增加种群多样性的同时,提高算法的收敛速度. 对全局最优个体采用精英反向学习策略,提高种群质量. 在人工蜂群探索能力的基础上,引入全局最优位置引导,提高黏菌算法的开发能力. 通过对14个测试函数和CEC2017测试函数集中部分函数的寻优对比分析可知,ISMABC算法的寻优能力和收敛速度都有了较大的提升. 为了验证ISMABC算法的可行性,采用所提算法求解多无人机协同路径规划问题. 通过对比分析可知,利用ISMABC算法能够为每架UAV规划出满足约束且代价最小的路径.
关键词:
多无人机,
路径规划,
黏菌算法,
人工蜂群算法,
佳点集,
非线性收敛因子
|
|
| [1] |
LIANG Y, QI D, YAN J Z Adaptive leader–follower formation control for swarms of unmanned aerial vehicles with motion constraints and unknown disturbances[J]. Chinese Journal of Aeronautics, 2020, 33 (11): 2972- 2988
doi: 10.1016/j.cja.2020.03.020
|
|
|
| [2] |
HASSANALIAN M, ABDELKEFI A Classifications, applications, and design challenges of drones: a review[J]. Progress in Aerospace Sciences, 2017, 91: 99- 131
doi: 10.1016/j.paerosci.2017.04.003
|
|
|
| [3] |
DEWANGAN R K, SHUKLA A, GODFREY W W Three-dimensional path planning using grey wolf optimizer for UAVs[J]. Applied Intelligence, 2019, 49: 2201- 2217
doi: 10.1007/s10489-018-1384-y
|
|
|
| [4] |
DE P, DUNNE E J, GHOSH J B, et al The discrete time-cost tradeoff problem revisited[J]. European Journal of Operational Research, 1995, 81 (2): 225- 238
doi: 10.1016/0377-2217(94)00187-H
|
|
|
| [5] |
ZHANG X, LU X, JIA S, et al A novel phase angle-encoded fruit fly optimization algorithm with mutation adaptation mechanism applied to UAV path planning[J]. Applied Soft Computing, 2018, 70: 371- 388
doi: 10.1016/j.asoc.2018.05.030
|
|
|
| [6] |
QU C, GAI W, ZHANG J, et al A novel hybrid grey wolf optimizer algorithm for unmanned aerial vehicle (UAV) path planning[J]. Knowledge-Based Systems, 2020, 194: 105530
doi: 10.1016/j.knosys.2020.105530
|
|
|
| [7] |
DUAN H, YU Y, ZHANG X, et al Three-dimension path planning for UCAV using hybrid meta-heuristic ACO-DE algorithm[J]. Simulation Modelling Practice and Theory, 2010, 18 (8): 1104- 1115
doi: 10.1016/j.simpat.2009.10.006
|
|
|
| [8] |
HOUSSEIN E H, MAHDY M A, BLONDIN M J, et al Hybrid slime mould algorithm with adaptive guided differential evolution algorithm for combinatorial and global optimization problems[J]. Expert Systems with Applications, 2021, 174: 114689
doi: 10.1016/j.eswa.2021.114689
|
|
|
| [9] |
LI S, CHEN H, WANG M, et al Slime mould algorithm: a new method for stochastic optimization[J]. Future Generation Computer Systems, 2020, 111: 300- 323
doi: 10.1016/j.future.2020.03.055
|
|
|
| [10] |
GAO W, LIU S A modified artificial bee colony algorithm[J]. Computers and Operations Research, 2012, 39 (3): 687- 697
doi: 10.1016/j.cor.2011.06.007
|
|
|
| [11] |
YILDIZ B S, PHOLDEE N, BUREERAT S, et al Enhanced grasshopper optimization algorithm using elite opposition-based learning for solving real-world engineering problems[J]. Engineering with Computers, 2022, 38 (5): 4207- 4219
doi: 10.1007/s00366-021-01368-w
|
|
|
| [12] |
HEIDARI A A, MIRJALILI S, FARIS H, et al Harris hawks optimization: algorithm and applications[J]. Future Generation Computer Systems, 2019, 97: 849- 872
doi: 10.1016/j.future.2019.02.028
|
|
|
| [13] |
MIRJALILI S, MIRJALILI S M, LEWIS A Grey wolf optimizer[J]. Advances in Engineering Software, 2014, 69: 46- 61
doi: 10.1016/j.advengsoft.2013.12.007
|
|
|
| [14] |
MIRJALILI S, LEWIS A The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95: 51- 67
doi: 10.1016/j.advengsoft.2016.01.008
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|