|
|
|
| Multi-objective constraint-based smooth path generation for UAVs global optimization method |
Yuxin LIAO1( ),Wei WANG1,*(),Weiming TENG2,Haiyan HE2,Zhan WANG3,Jin WANG4 ),Wei WANG1,*(),Weiming TENG2,Haiyan HE2,Zhan WANG3,Jin WANG4 |
1. School of Mechanical Engineering, Zhejiang Sci-Tech University, Hangzhou 310018, China
2. Zhejiang Baima Lake Laboratory Limited Company, Hangzhou 310051, China
3. Zhejiang Energy Digital Technology Limited Company, Hangzhou 310012, China
4. State Key Laboratory of Fluid Power and Mechatronic Systems, Zhejiang University, Hangzhou 310027, China |
|
|
|
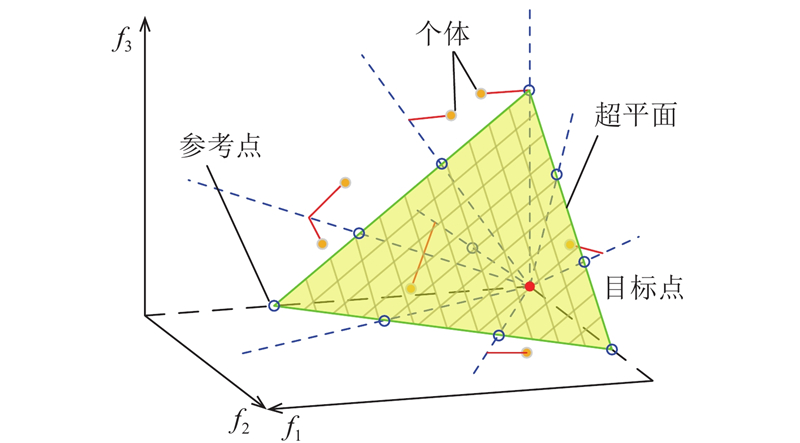
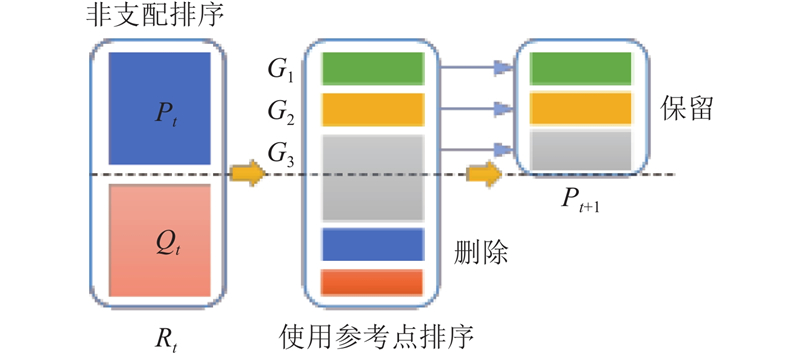
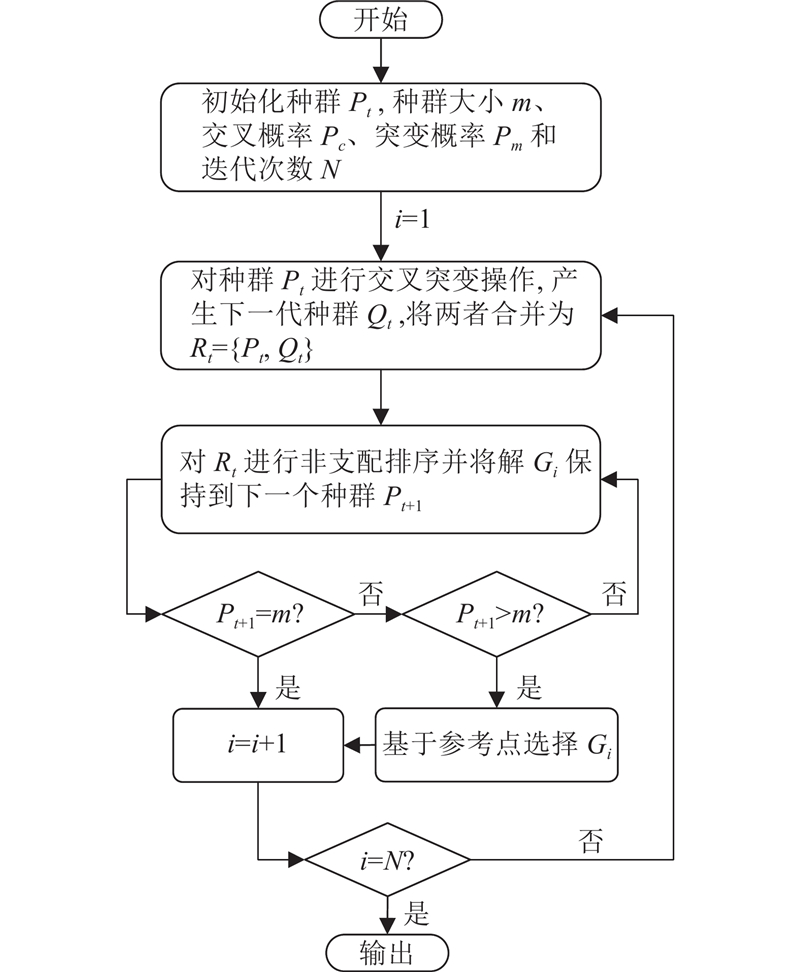
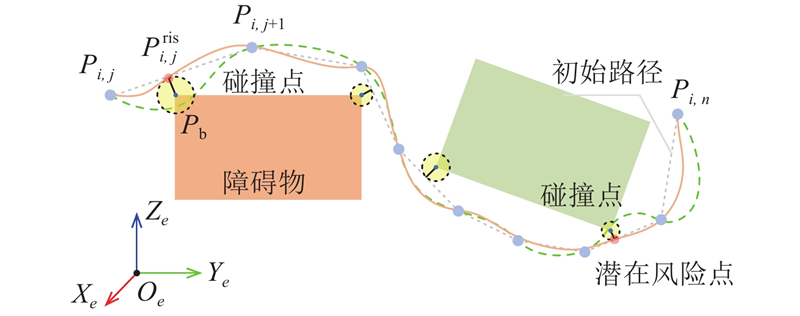
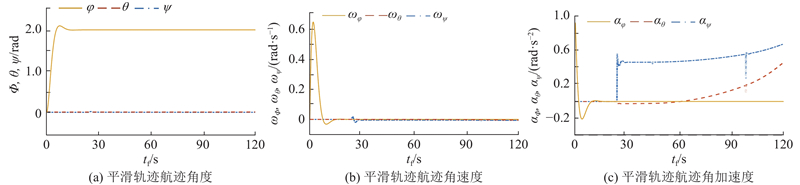
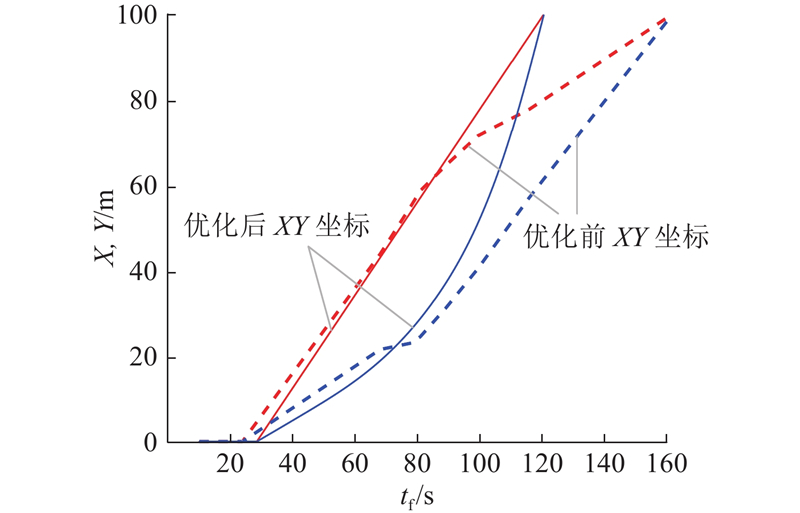
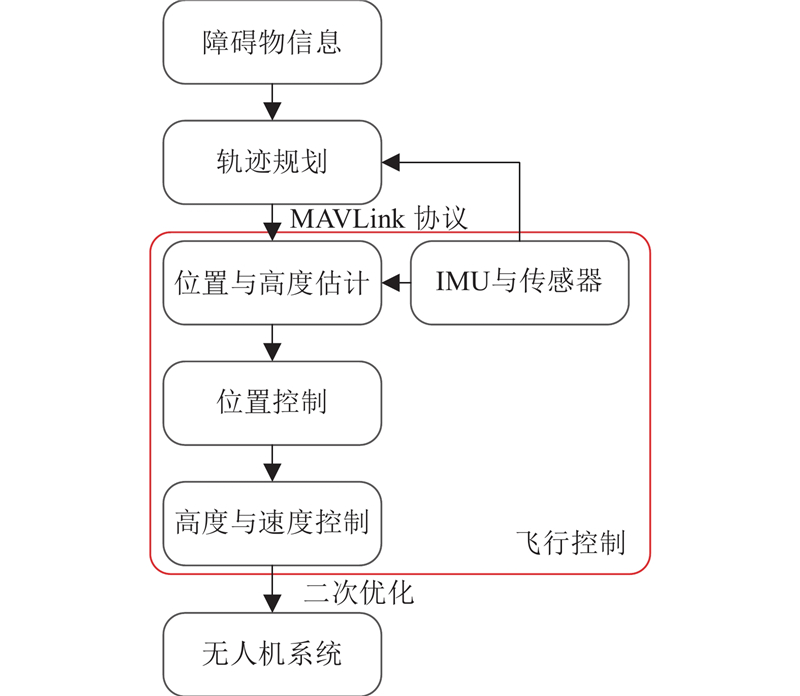
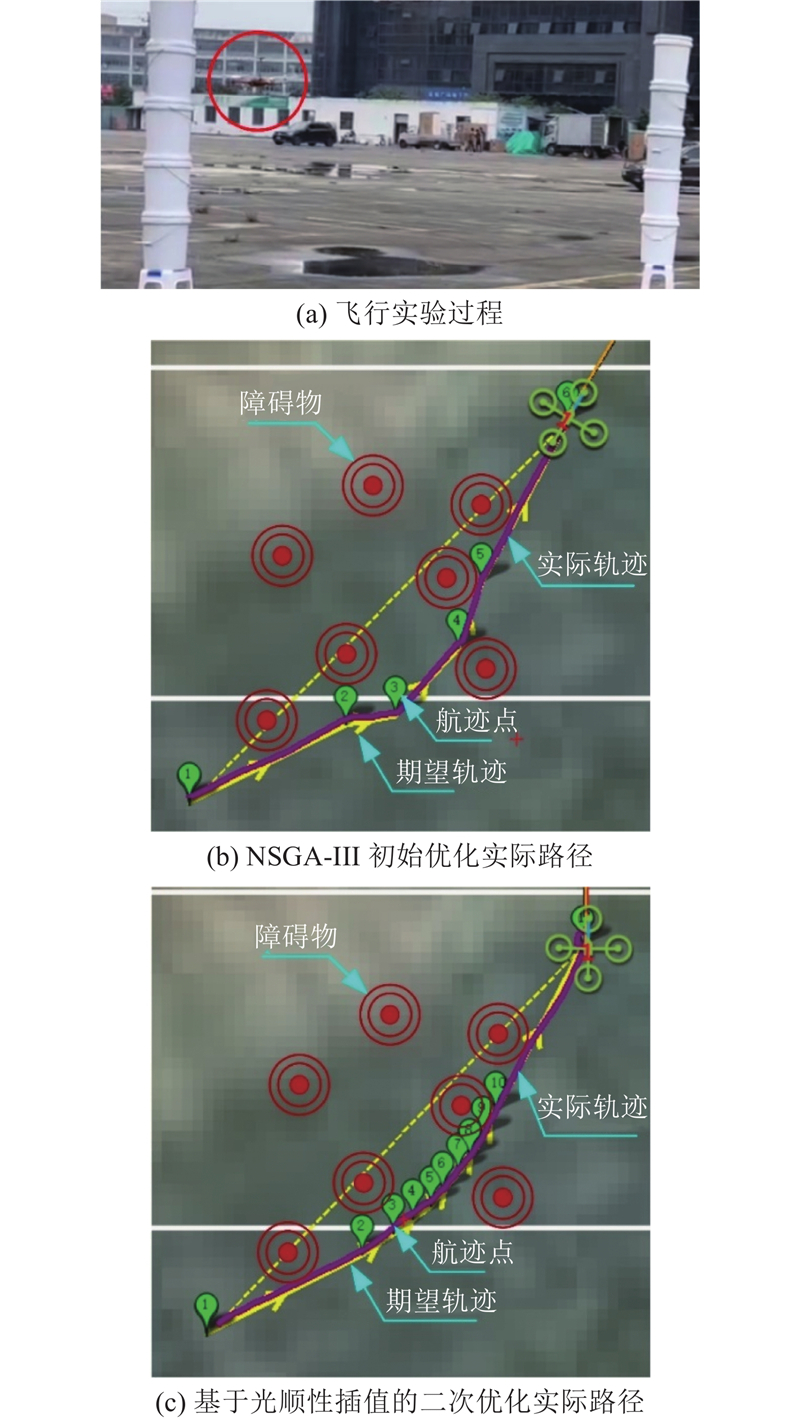
Abstract Path planning in complex environments is fundamental to ensuring safe UAV operations. A global optimization method was proposed that comprehensively considered obstacle avoidance capability, flight efficiency, and stability constraints. The cylindrical envelope method was employed to standardize environmental data and obstacles, and the impact of UAV attitude variations on motion stability and flight efficiency was analyzed. Three optimization objectives—efficiency, obstacle avoidance, and stability—were established, expanding the optimization space from traditional one-dimensional or two-dimensional to three-dimensional. A reference-point-based non-dominated sorting genetic algorithm III (NSGA-III) was introduced to accelerate the search process in high-dimensional space, achieving approximately 49% faster convergence compared to the improved A* algorithm. A potential risk point detection mechanism was designed for obstacle avoidance, and a quintic B-spline was used to perform secondary optimization on the initial optimal path, enhancing the geometric characteristics and smoothness of the UAV trajectory. As a result, flight stability and efficiency were improved by 66.7% and 25%, respectively. The effectiveness of NSGA-III in trajectory planning was validated through simulations and experiments.
|
|
Received: 11 June 2024
Published: 25 July 2025
|
|
|
| Fund: 国家自然科学基金资助项目(52405041);浙江省“尖兵领雁”资助项目(2023C01180);浙江省自然科学基金资助项目(LQ22E050022). |
|
Corresponding Authors:
Wei WANG
E-mail: lyxzstu@163.com;wangw@zstu.edu.cn
|
基于多目标约束的无人机光顺路径生成全局优化方法
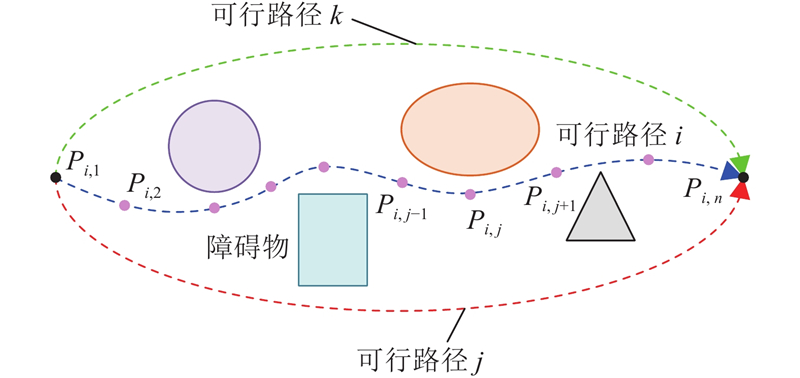
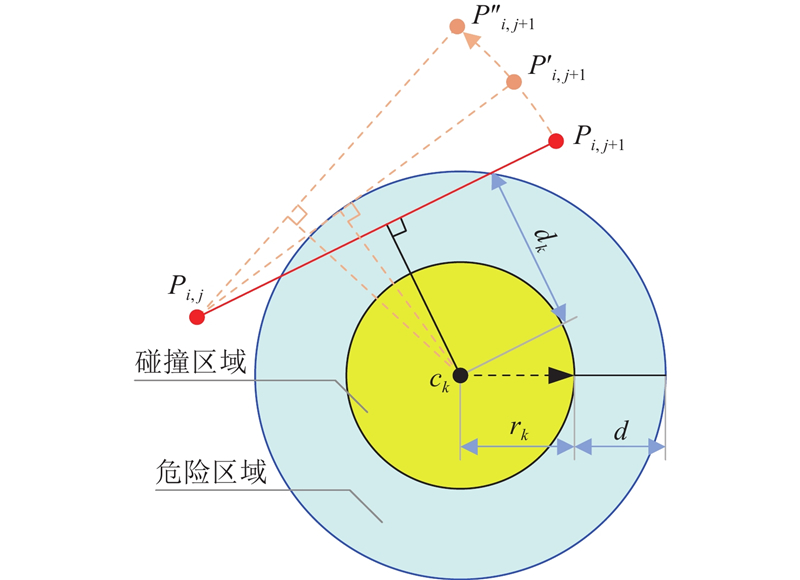
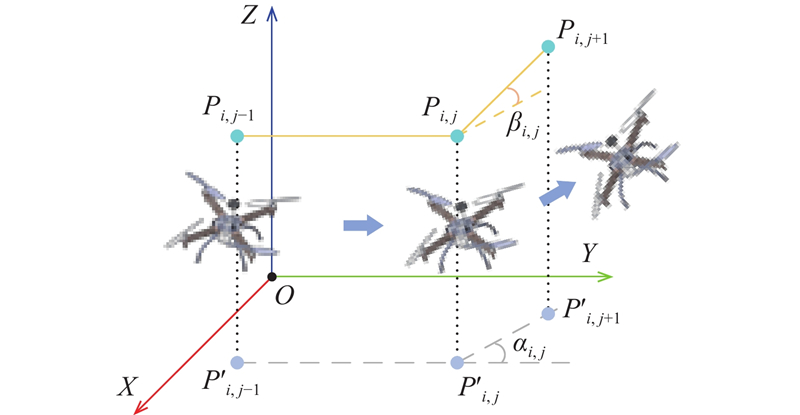
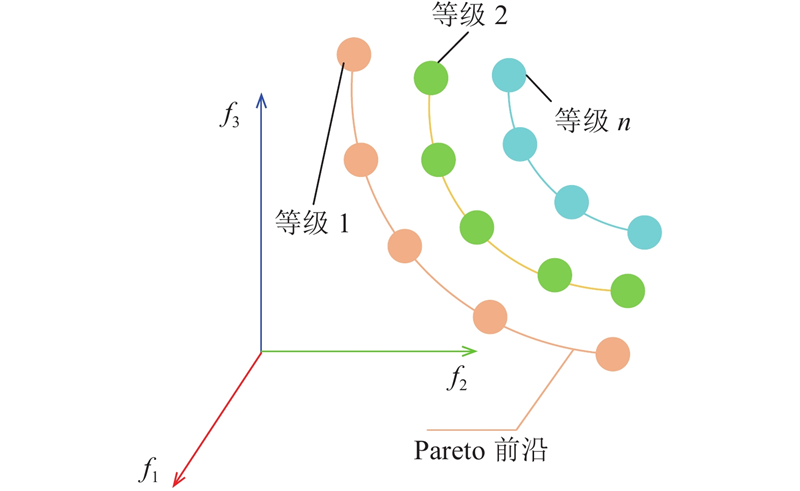
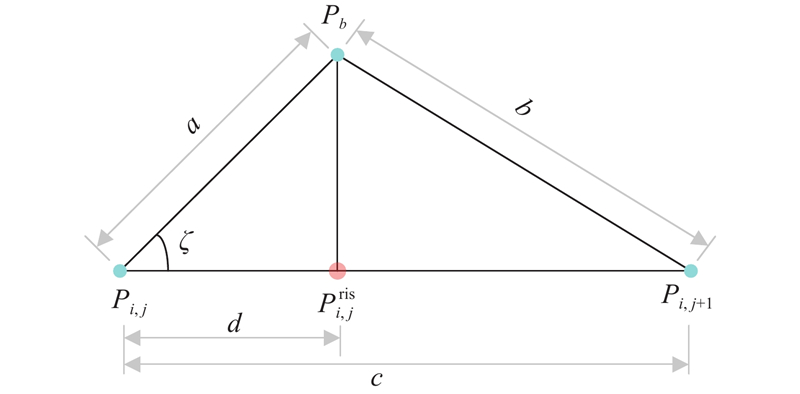
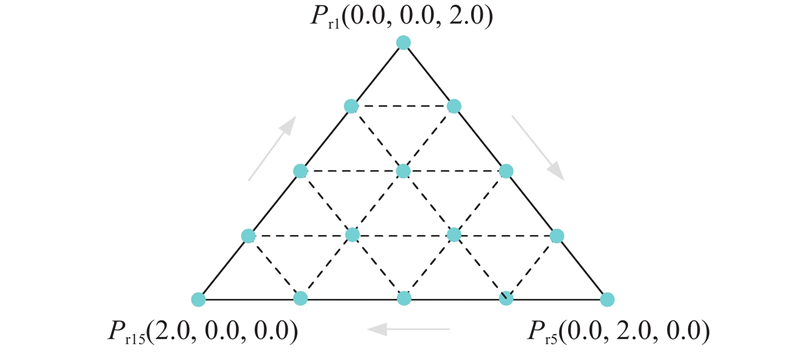
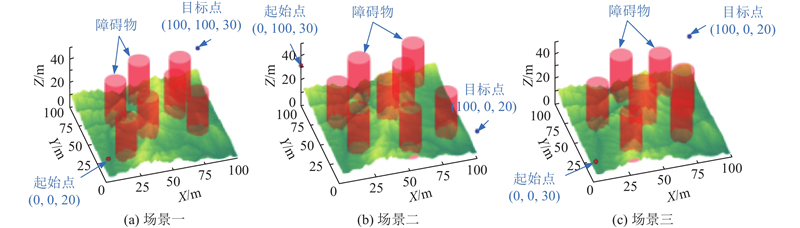
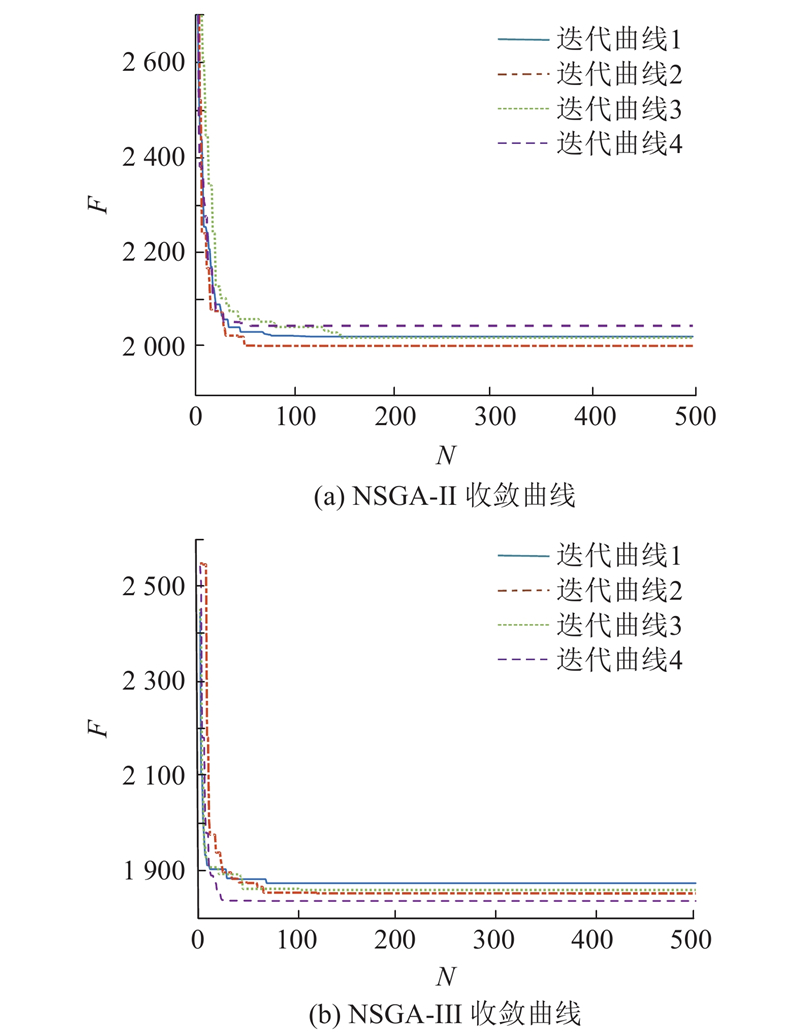
复杂环境中的路径规划是无人机安全作业的基础,为此提出综合考虑避障能力、飞行效率和稳定性约束的全局优化方法. 采用柱面包络法对环境信息及障碍物进行规则化处理,分析无人机姿态变化对运动稳定性和飞行效率的潜在影响. 建立效率、避障和稳定性3个优化目标,将优化空间从传统的一维或二维提升到三维. 引入基于参考点的第三代非支配排序遗传算法 (NSGA-III)加速高维空间中的搜索过程,与改进的A*算法相比,收敛速度提高约49%. 针对障碍物设计潜在风险点判断机制,结合五次B样条对初始最优路径进行二次优化,改善无人机轨迹的几何特性及光顺性,使飞行稳定性及效率分别提高66.7%和25%. 通过仿真和实验验证NSGA-III在轨迹规划方面的有效性.
关键词:
路径规划,
多目标,
样条曲线,
轨迹平滑,
无人机
|
|
| [1] |
李明龙, 杨文婧, 易晓东, 等 面向灾难搜索救援场景的空地协同无人群体任务规划研究[J]. 机械工程学报, 2019, 55 (11): 1- 9
LI Minglong, YANG Wenjing, YI Xiaodong, et al Swarm robot task planning based on air and ground coordination for disaster search and rescue[J]. Journal of Mechanical Engineering, 2019, 55 (11): 1- 9
doi: 10.3901/JME.2019.11.001
|
|
|
| [2] |
SHE R, OUYANG Y Efficiency of UAV-based last-mile delivery under congestion in low-altitude air[J]. Transportation Research Part C: Emerging Technologies, 2021, 122: 102878
doi: 10.1016/j.trc.2020.102878
|
|
|
| [3] |
席志鹏, 楼卓, 李晓霞, 等 集中式光伏电站巡检无人机视觉定位与导航[J]. 浙江大学学报: 工学版, 2019, 53 (5): 880- 888
XI Zhipeng, LOU Zhuo, LI Xiaoxia, et al Vision-based localization and navigation for UAV inspection in photovoltaic farms[J]. Journal of Zhejiang University: Engineering Science, 2019, 53 (5): 880- 888
|
|
|
| [4] |
徐陶, 李雪, 祁雁楠, 等 水平棚架式梨树多旋翼无人机液体授粉试验[J]. 农业机械学报, 2023, 54 (Suppl.2): 136- 141
XU Tao, LI Xue, QI Yannan, et al Experiment on liquid pollination of pear tree with horizontal scaffolding based on multi-rotor UAV[J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54 (Suppl.2): 136- 141
|
|
|
| [5] |
KRISHNAN P S, MANIMALA K Implementation of optimized dynamic trajectory modification algorithm to avoid obstacles for secure navigation of UAV[J]. Applied Soft Computing, 2020, 90: 106168
doi: 10.1016/j.asoc.2020.106168
|
|
|
| [6] |
RAO J, XIANG C, XI J, et al Path planning for dual UAVs cooperative suspension transport based on artificial potential field-A* algorithm[J]. Knowledge-Based Systems, 2023, 277: 110797
doi: 10.1016/j.knosys.2023.110797
|
|
|
| [7] |
杨森, 张翔伦 基于能量优化的无人机机动轨迹生成方法[J]. 航空学报, 2020, 41 (Suppl.2): 724288
YANG Sen, ZHANG Xianglun Energy optimized maneuver trajectory generation for unmanned aerial vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (Suppl.2): 724288
|
|
|
| [8] |
PHUNG M D, QUACH C H, DINH T H, et al Enhanced discrete particle swarm optimization path planning for UAV vision-based surface inspection[J]. Automation in Construction, 2017, 81: 25- 33
doi: 10.1016/j.autcon.2017.04.013
|
|
|
| [9] |
ASLAN M F, DURDU A, SABANCI K Goal distance-based UAV path planning approach, path optimization and learning-based path estimation: GDRRT*, PSO-GDRRT* and BiLSTM-PSO-GDRRT[J]. Applied Soft Computing, 2023, 137: 110156
doi: 10.1016/j.asoc.2023.110156
|
|
|
| [10] |
PENG X, XU D, ZHANG F. UAV online path planning based on dynamic multiobjective evolutionary algorithm [C]// Proceedings of the 30th Chinese Control Conference. Yantai: IEEE, 2011: 5424–5429.
|
|
|
| [11] |
GUERRERO J A, BESTAOUI Y UAV path planning for structure inspection in windy environments[J]. Journal of Intelligent and Robotic Systems, 2013, 69 (1): 297- 311
|
|
|
| [12] |
PHUNG M D, HA Q P Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization[J]. Applied Soft Computing, 2021, 107: 107376
doi: 10.1016/j.asoc.2021.107376
|
|
|
| [13] |
DEB K, JAIN H An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part I: solving problems with box constraints[J]. IEEE Transactions on Evolutionary Computation, 2014, 18 (4): 577- 601
doi: 10.1109/TEVC.2013.2281535
|
|
|
| [14] |
YU X, JIANG N, WANG X, et al A hybrid algorithm based on grey wolf optimizer and differential evolution for UAV path planning[J]. Expert Systems with Applications, 2023, 215: 119327
doi: 10.1016/j.eswa.2022.119327
|
|
|
| [15] |
BASHIR N, BOUDJIT S, DAUPHIN G, et al An obstacle avoidance approach for UAV path planning[J]. Simulation Modelling Practice and Theory, 2023, 129: 102815
doi: 10.1016/j.simpat.2023.102815
|
|
|
| [16] |
LEE G, KIM K, JANG J Real-time path planning of controllable UAV by subgoals using goal-conditioned reinforcement learning[J]. Applied Soft Computing, 2023, 146: 110660
doi: 10.1016/j.asoc.2023.110660
|
|
|
| [17] |
GHAMBARI S, GOLABI M, LEPAGNOT J, et al. An enhanced NSGA-II for multiobjective UAV path planning in urban environments [C]// Proceedings of the IEEE 32nd International Conference on Tools with Artificial Intelligence. Baltimore: IEEE, 2020: 106–111.
|
|
|
| [18] |
TAVANA M, LI Z, MOBIN M, et al Multi-objective control chart design optimization using NSGA-III and MOPSO enhanced with DEA and TOPSIS[J]. Expert Systems with Applications, 2016, 50: 17- 39
doi: 10.1016/j.eswa.2015.11.007
|
|
|
| [19] |
GOEL U, VARSHNEY S, JAIN A, et al Three dimensional path planning for UAVs in dynamic environment using glow-worm swarm optimization[J]. Procedia Computer Science, 2018, 133: 230- 239
doi: 10.1016/j.procs.2018.07.028
|
|
|
| [20] |
ZHANG X, GUO Y, YANG J, et al Many-objective evolutionary algorithm based agricultural mobile robot route planning[J]. Computers and Electronics in Agriculture, 2022, 200: 107274
doi: 10.1016/j.compag.2022.107274
|
|
|
| [21] |
戴佳佳, 龚小溪, 汪俊 面向飞机外表面检测任务的无人机覆盖路径规划方法[J]. 机械工程学报, 2023, 59 (16): 243- 253
DAI Jiajia, GONG Xiaoxi, WANG Jun Coverage path planning method of unmanned aerial vehicle for aircraft surface detection task[J]. Journal of Mechanical Engineering, 2023, 59 (16): 243- 253
doi: 10.3901/JME.2023.16.243
|
|
|
| [22] |
WANG H, WANG J, DING G, et al Completion time minimization with path planning for fixed-wing UAV communications[J]. IEEE Transactions on Wireless Communications, 2019, 18 (7): 3485- 3499
doi: 10.1109/TWC.2019.2914203
|
|
|
| [23] |
鲜斌, 宋宁 基于模型预测控制与改进人工势场法的多无人机路径规划[J]. 控制与决策, 2024, 39 (7): 2133- 2141
XIAN Bin, SONG Ning A multiple UAVs path planning method based on model predictive control and improved artificial potential field[J]. Control and Decision, 2024, 39 (7): 2133- 2141
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|