A real-time unmanned aerial vehicle (UAV) object tracking algorithm based on the response and filter deviation-aware regularization was proposed, aiming at the problem that targets were easily subject to the huge variation of appearance and various change of viewpoint interference in the UAV sequences. According to the consistency of response and correlation filter difference between video frames, the variation of correlation response and filter difference were modeled. Furthermore, an objective function with constraint scheme was constructed, which can learn variation of object appearance and filter. Meanwhile, an auxiliary variable based on the response and filter deviation-aware regularization was introduced to build an optimization function and alternating direction method of multipliers (ADMM) was used to optimize the solution of the correlation filter and auxiliary variable. To validate the effectiveness of the proposed algorithm, comparison experiments with other 9 algorithms were performed on three UAV tracking benchmarks, including DTB70、UAV123@10 fps and UAVDT, in terms of precision and success rate. Experimental results show that the proposed algorithm has good robustness for occlusion, deformation and view variation and can effectively track the target with an average speed of 39.0 frames of second.
Hai-jun WANG,Sheng-yan ZHANG,Yu-jie DU. UAV object tracking algorithm based on response and filter deviation-aware regularization. Journal of ZheJiang University (Engineering Science), 2022, 56(9): 1824-1832.
Tab.1Comparison in terms of precision and success rates for ten tracking algorithms on three UAV datasets
算法
P
ARV
BC
DEF
FCM
IPR
MB
OCC
OPR
OV
SV
SOA
RDAR
0.600
0.589
0.656
0.705
0.613
0.675
0.582
0.434
0.628
0.661
0.700
BACF
0.392
0.545
0.448
0.636
0.547
0.639
0.515
0.266
0.650
0.533
0.624
MCCT_H
0.495
0.484
0.550
0.621
0.552
0.502
0.571
0.383
0.573
0.643
0.606
ECO-HC
0.506
0.567
0.584
0.680
0.568
0.640
0.641
0.430
0.557
0.530
0.667
SRDCFdecon
0.343
0.449
0.283
0.574
0.430
0.500
0.456
0.193
0.570
0.473
0.564
Tab.2Comparison in terms of precision of five tracking algorithms for different attributes on DTB70 dataset
算法
P
ARC
BC
CM
FM
FOC
IV
LR
OV
POC
SV
SOB
VC
RDAR
0.587
0.469
0.635
0.531
0.464
0.568
0.568
0.547
0.613
0.630
0.678
0.591
BACF
0.478
0.425
0.532
0.407
0.336
0.430
0.431
0.421
0.467
0.525
0.605
0.491
MCCT_H
0.493
0.469
0.544
0.361
0.421
0.477
0.455
0.493
0.542
0.547
0.627
0.484
ECO-HC
0.558
0.511
0.609
0.487
0.454
0.507
0.527
0.522
0.556
0.587
0.637
0.548
SRDCFdecon
0.476
0.427
0.536
0.403
0.427
0.423
0.436
0.483
0.514
0.535
0.621
0.478
Tab.3Comparison in terms of precision of five tracking algorithms for different attributes on UAV123@10 pfs dataset
算法
P
BC
CM
IV
LO
LTT
OB
OM
SV
SO
RDAR
0.632
0.687
0.761
0.549
0.877
0.720
0.641
0.647
0.808
BACF
0.599
0.614
0.739
0.488
0.886
0.699
0.604
0.604
0.770
MCCT_H
0.571
0.622
0.703
0.482
0.925
0.667
0.561
0.594
0.796
ECO-HC
0.607
0.647
0.723
0.504
0.924
0.669
0.596
0.607
0.767
SRDCFdecon
0.533
0.588
0.690
0.433
0.812
0.650
0.560
0.565
0.716
Tab.4Comparison in terms of precision of five tracking algorithms for different attributes on UAVDT dataset
算法
Rs
ARV
BC
DEF
FCM
IPR
MB
OCC
OPR
OV
SV
SOA
RDAR
0.396
0.379
0.434
0.483
0.420
0.458
0.413
0.318
0.407
0.465
0.467
BACF
0.273
0.337
0.302
0.436
0.371
0.412
0.348
0.203
0.419
0.392
0.411
MCCT_H
0.334
0.296
0.354
0.410
0.376
0.334
0.377
0.243
0.349
0.439
0.399
ECO-HC
0.376
0.349
0.404
0.469
0.410
0.434
0.431
0.319
0.416
0.430
0.446
SRDCFdecon
0.250
0.285
0.196
0.398
0.311
0.331
0.308
0.150
0.384
0.351
0.369
Tab.5Comparison in terms of success rate of five tracking algorithms for different attributes on DTB70 dataset
算法
Rs
ARC
BC
CM
FM
FOC
IV
LR
OV
POC
SV
SOB
VC
RDAR
0.412
0.302
0.464
0.355
0.257
0.391
0.342
0.404
0.427
0.453
0.478
0.422
BACF
0.334
0.275
0.397
0.275
0.173
0.310
0.248
0.321
0.327
0.374
0.424
0.353
MCCT_H
0.357
0.305
0.407
0.260
0.236
0.342
0.257
0.365
0.376
0.396
0.451
0.361
ECO-HC
0.392
0.339
0.449
0.332
0.247
0.362
0.299
0.387
0.391
0.424
0.464
0.400
SRDCFdecon
0.344
0.293
0.399
0.276
0.231
0.314
0.247
0.356
0.361
0.390
0.440
0.360
Tab.6Comparison in terms of success rate of five tracking algorithms for different attributes on UAV123@10 pfs dataset
Fig.1Comparison of representative tracking results by different algorithms on DTB70、UAV123@10 fps、UAVDT
算法
Rs
BC
CM
IV
LO
LTT
OB
OM
SV
SO
RDAR
0.399
0.435
0.465
0.386
0.577
0.442
0.397
0.435
0.464
BACF
0.367
0.387
0.460
0.340
0.582
0.443
0.371
0.408
0.428
MCCT_H
0.343
0.367
0.415
0.348
0.565
0.390
0.343
0.384
0.389
ECO-HC
0.364
0.379
0.434
0.348
0.573
0.391
0.358
0.390
0.375
SRDCFdecon
0.339
0.374
0.430
0.322
0.515
0.395
0.351
0.389
0.410
Tab.7Comparison in terms of success rate of five tracking algorithms for different attributes on UAVDT dataset
算法
v/(帧·s?1)
算法
v/(帧·s?1)
RDAR
39.0
SAMF_CA
9.1
ECO-HC
62.2
SAMF
10.0
MCCT_H
59.0
SRDCF
10.7
BACF
46.5
SRDCFdecon
6.0
fDSST
132.0
Staple
62.5
Tab.8Comparison of tracking speed for different tracking algorithms on DTB70 dataset
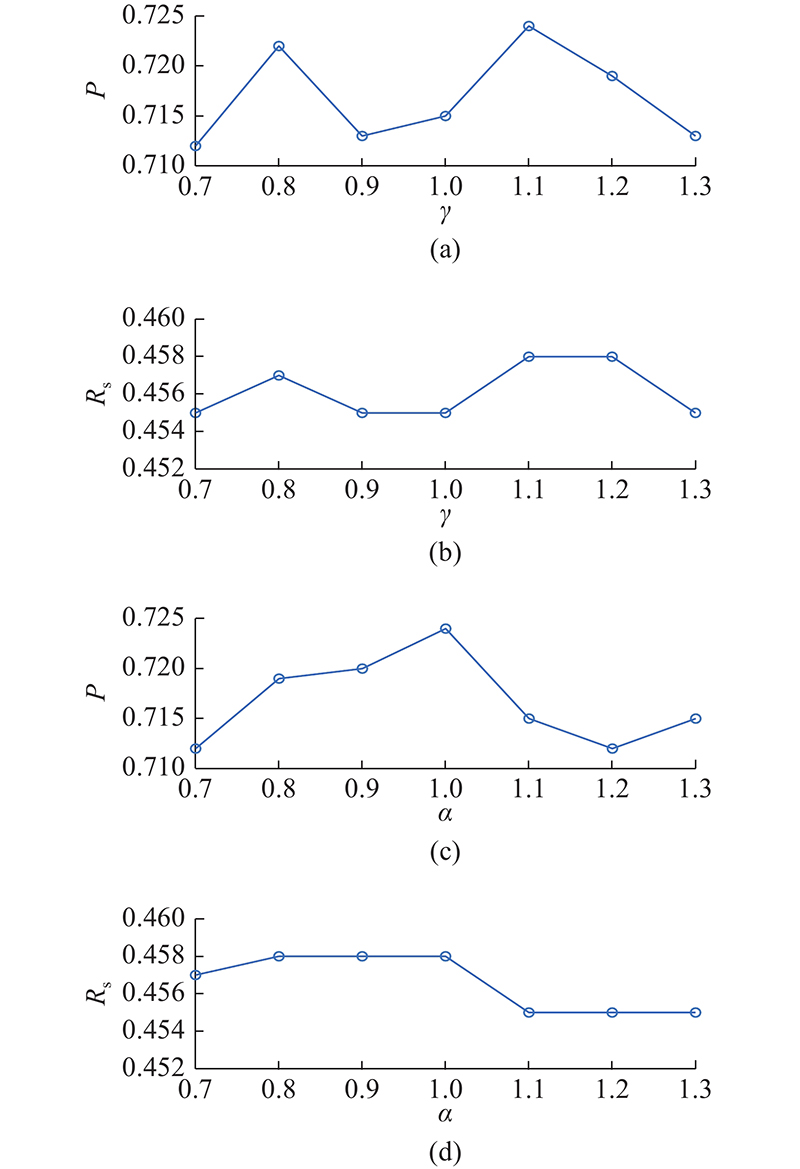
Fig.2Comparison of tracking performance on UAVDT with different parameters
模块
P
Rs
DTB70
UAV123@10 fps
UAVDT
DTB70
UAV123@10 fps
UAVDT
BACF
0.590
0.572
0.686
0.402
0.413
0.433
BACF+RD
0.648
0.663
0.713
0.451
0.484
0.457
BACF+FD
0.667
0.649
0.671
0.458
0.470
0.453
RDAR(BACF+RD+CF)
0.671
0.672
0.724
0.462
0.488
0.458
Tab.9Comparison of tracking performance with different modules on three UAV datasets
[1]
刘芳, 杨安喆, 吴志威 基于自适应Siamese网络的无人机目标跟踪算法[J]. 航空学报, 2020, 41 (1): 323423 LIU Fang, YANG An-zhe, WU Zhi-wei Adaptive Siamese network based UAV target tracking algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (1): 323423
[2]
孙锐, 方林凤, 梁启丽, 等 孪生网络框架下融合显著性和干扰在线学习的航拍目标跟踪算法[J]. 电子与信息学报, 2021, 43 (5): 1414- 1423 SUN Rui, FANG Lin-feng, LIANG Qi-li, et al Siamese network combined learning saliency and online leaning interference for aerial object tracking algorithm[J]. Journal of Electronics and Information Technology, 2021, 43 (5): 1414- 1423
doi: 10.11999/JEIT200140
[3]
赵燕伟, 张健, 周仙明, 等 基于视觉−磁引导的无人机动态跟踪与精准着陆[J]. 浙江大学学报:工学版, 2021, 55 (1): 96- 108 ZHAO Yan-wei, ZHANG Jian, ZHOU Xian-ming, et al Dynamic tracking and precise landing of UAV based on visual magnetic guidance[J]. Journal of Zhejiang University: Engineering Science, 2021, 55 (1): 96- 108
[4]
刘芳, 王洪娟, 黄光伟, 等 基于自适应深度网络的无人机目标跟踪算法[J]. 航空学报, 2019, 40 (3): 322332 LIU Fang, WANG Hong-juan, HUANG Guang-wei, et al UAV target tracking algorithm based on adaptive depth network[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40 (3): 322332
[5]
FU C H, HE Y J, LIN F L, et al Robust multi-kernelized correlators for UAV tracking with adaptive context analysis and dynamic weighted filters[J]. Neural Computing and Applications, 2020, 32: 12591- 12607
doi: 10.1007/s00521-020-04716-x
[6]
LI Y M, FU C H, HUANG Z Y, et al Intermittent contextual learning for keyfilter-aware UAV object tracking using deep convolutional feature[J]. IEEE Transactions on Multimedia, 2021, 23: 810- 822
doi: 10.1109/TMM.2020.2990064
[7]
HE Y J, FU C H, LIN F L, et al. Towards robust visual tracking for unmanned aerial vehicle with tri-attentional correlation filters [C]// 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Las Vegas: IEEE, 2020: 1575-1582.
[8]
BOLME D S, BEVERIDGE J R, DRAPER B A, et al. Visual object tracking using adaptive correlation filters [C]// 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Francisco: IEEE, 2010: 2544-2550.
[9]
HENRIQUES J F, CASEIRO R, MARTINS P, et al High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37 (3): 583- 596
doi: 10.1109/TPAMI.2014.2345390
[10]
GALOOGAHI H K, FAGG A, LUCEY S. Learning background-aware correlation filters for visual tracking [C]// 2017 IEEE International Conference on Computer Vision (ICCV). Venice: IEEE, 2017: 1144-1152.
[11]
LI F, TIAN C, ZUO W M, et al. Learning spatial-temporal regularized correlation filters for visual tracking [C]// 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition (ICCV). Salt Lake City: IEEE, 2018: 4904-4913.
[12]
DAI K, WANG D, LU H C, et al. Visual tracking via adaptive spatially-regularized correlation filters [C]// 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Long Beach: IEEE, 2019: 4665-4674.
[13]
MA C, HUANG J B, YANG X K, et al Robust visual tracking via hierarchical convolutional features[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2019, 41 (11): 2709- 2723
doi: 10.1109/TPAMI.2018.2865311
[14]
FU C H, YE J J, XU J T, et al Disruptor-aware interval-based response inconsistency for correlation filters in real-time aerial tracking[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 59 (8): 6301- 6313
doi: 10.1109/TGRS.2020.3030265
[15]
DANELLJAN M, BHAT G, KHAN F S, et al. ECO: efficient convolution operators for tracking [C]// 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Honolulu: IEEE, 2017: 6931-6939.
[16]
WANG N, ZHOU W G, TIAN Q, et al. Multi-cue correlation filters for robust visual tracking [C]// 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City: IEEE, 2018: 4844-4853.
[17]
DANELLJAN M, HÄGER G, KHAN F S, et al. Discriminative scale space tracking [J] IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(8): 1561-1575.
[18]
LI Y, ZHU J. A scale adaptive kernel correlation filter tracker with feature integration [C]// Computer Vision: ECCV 2014 Workshops. [S. l.]: Springer, 2015: 254-265.
[19]
MUELLER M, SMITH N, GHANEM B. Context-aware correlation filter tracking [C]// 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Honolulu: IEEE, 2017: 1387-1395.
[20]
DANELLJAN M, HÄGER G, KHAN F S, et al. Learning spatially regularized correlation filters for visual tracking [C]// 2015 IEEE International Conference on Computer Vision (ICCV). Santiago: IEEE, 2015: 4310-4318.
[21]
DANELLJAN M, HÄGER G, KHAN F S, et al. Adaptive decontamination of the training set: a unified formulation for discriminative visual tracking [C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas: IEEE, 2016: 1430-1438.