|
|
|
| Indoor positioning method of UAV based on improved MSCKF algorithm |
Si-peng WANG( ),Chang-ping DU*(),Guang-hua SONG,Yao ZHENG ),Chang-ping DU*(),Guang-hua SONG,Yao ZHENG |
| School of Aeronautics and Astronautics, Zhejiang University, Hangzhou 310027, China |
|
|
|
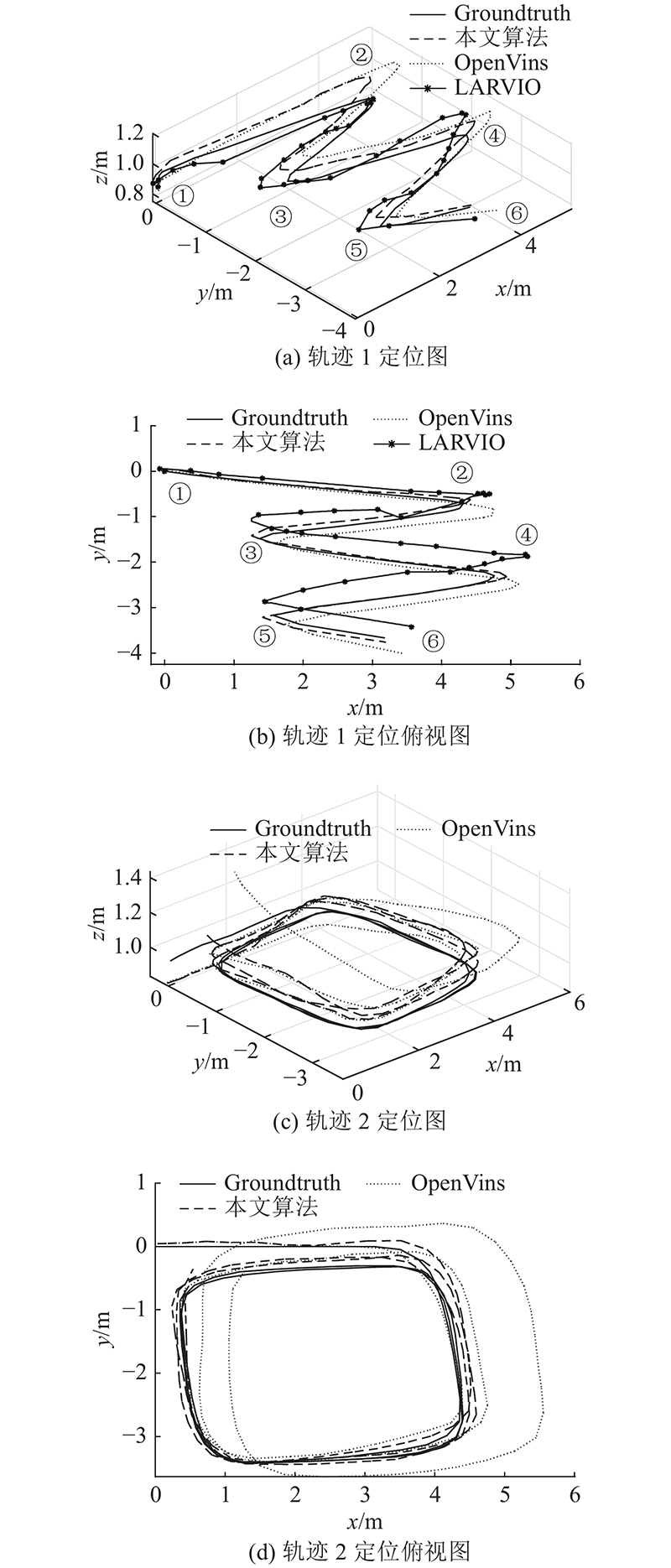
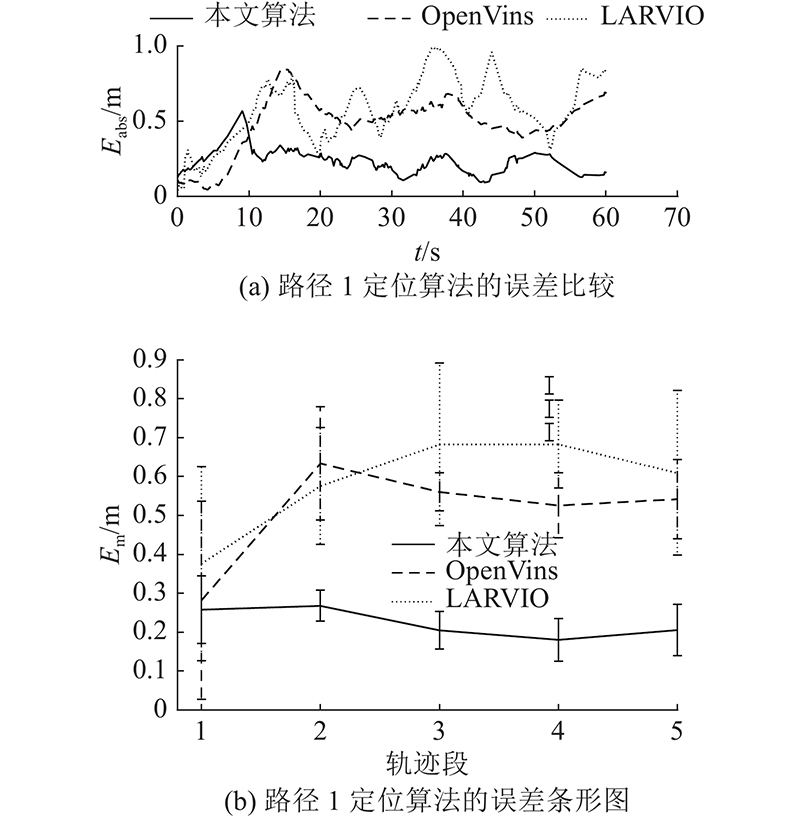
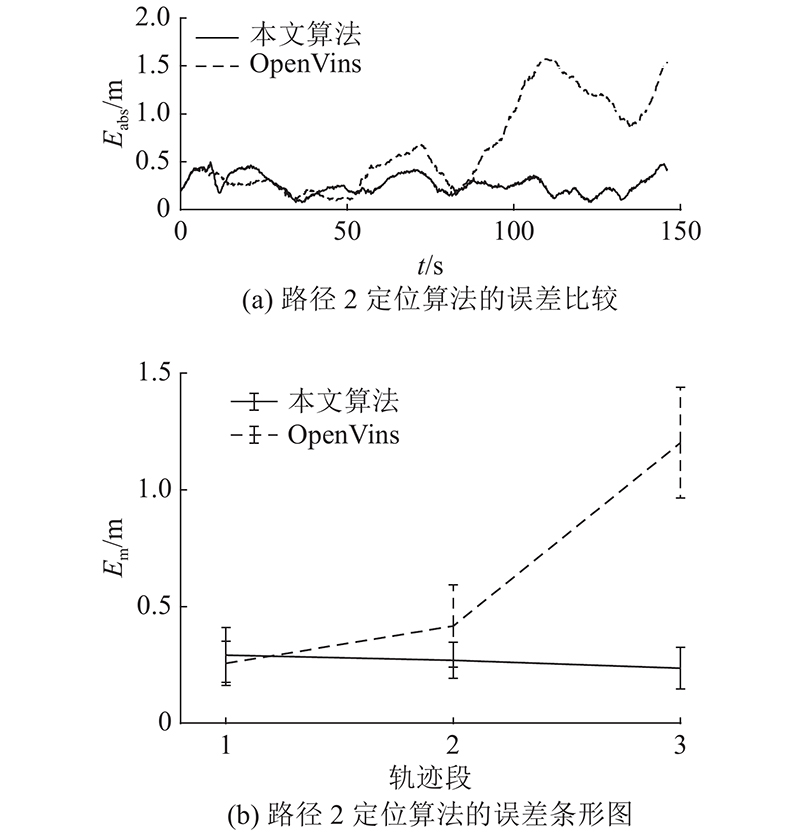
Abstract An indoor positioning method of unmanned aerial vehicle (UAV) based on improved multi-state constraint Kalman filter (MSCKF) was proposed aiming at the problem that the indoor positioning of UAV is prone to drift. A high robustness and low delay detection method was proposed under the framework of MSCKF. The pose of UAV was calculated with the help of the known positions of the mark points in world coordinate system. Then inertial measurement unit (IMU) data and monocular vision data fusion and UAV pose correction were realized. The proposed positioning method was tested. The simulation results show that the positioning error of the proposed method was within 0.266 m, and the positioning accuracy was improved by more than 54.6% compared to OpenVins and LARVIO.
|
|
Received: 20 May 2021
Published: 24 April 2022
|
|
|
| Fund: 装备预研教育部联合基金资助项目(6141A02011803) |
|
Corresponding Authors:
Chang-ping DU
E-mail: wangsipeng@zju.edu.cn;duchangping@zju.edu.cn
|
基于改进MSCKF的无人机室内定位方法
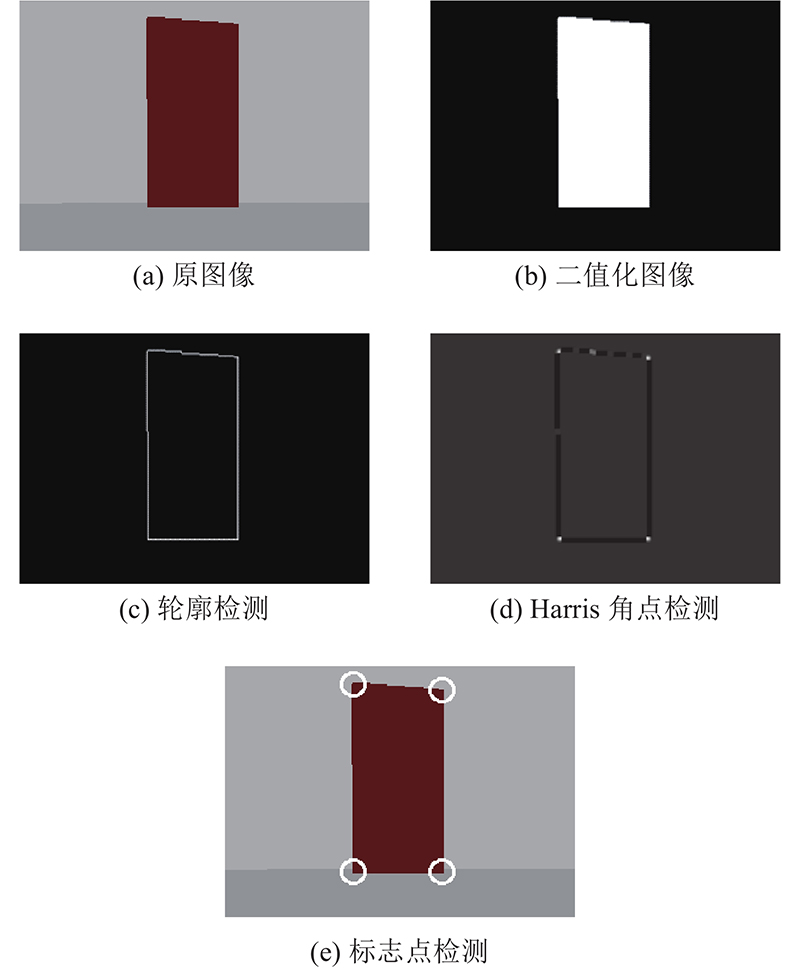
针对无人机室内定位容易出现漂移的问题,提出基于改进多状态约束卡尔曼滤波器(MSCKF)的无人机(UAV)室内定位方法. 该方法在MSCKF的框架下,提出高鲁棒性、低时延的标志点检测方法. 利用在世界坐标系下坐标已知的标志点计算得到无人机位姿,实现惯性测量单元(IMU)信息与单目视觉信息融合以及无人机位姿修正. 对提出的定位方法进行测试. 测试结果表明,该方法的定位误差小于0.266 m,与OpenVins和LARVIO开源算法相比,定位精度提高了54.6%以上.
关键词:
无人机(UAV),
室内定位,
卡尔曼滤波器,
标志点检测,
位姿修正
|
|
| [1] |
USENKO V, ENGEL J, STÜCKLER J, et al. Direct visual-inertial odometry with stereo cameras [C]// 2016 IEEE International Conference on Robotics and Automation. Stockholm: IEEE, 2016: 1885-1892.
|
|
|
| [2] |
MUR-ARTAL R, TARDóS J D Visual-inertial monocular SLAM with map reuse[J]. IEEE Robotics and Automation Letters, 2017, 2 (2): 796- 803
doi: 10.1109/LRA.2017.2653359
|
|
|
| [3] |
MUR-ARTAL R, MONTIEL J M M, TARDOS J D ORB-SLAM: a versatile and accurate monocular SLAM system[J]. IEEE Transactions on Robotics, 2015, 31 (5): 1147- 1163
doi: 10.1109/TRO.2015.2463671
|
|
|
| [4] |
MUR-ARTAL R, TARDóS J D Orb-slam2: an open-source slam system for monocular, stereo, and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33 (5): 1255- 1262
doi: 10.1109/TRO.2017.2705103
|
|
|
| [5] |
CASTELLANOS J A, NEIRA J, JD T Limits to the consistency of EKF-based SLAM[J]. IFAC Proceedings Volumes, 2004, 37 (8): 716- 721
doi: 10.1016/S1474-6670(17)32063-3
|
|
|
| [6] |
MOURIKIS A I, ROUMELIOTIS S I. A multi-state constraint Kalman filter for vision-aided inertial navigation [C]// Proceedings of 2007 IEEE International Conference on Robotics and Automation. Roma: IEEE, 2007: 3565-3572.
|
|
|
| [7] |
SUN K, MOHTA K, PFROMMER B, et al Robust stereo visual inertial odometry for fast autonomous flight[J]. IEEE Robotics and Automation Letters, 2018, 3 (2): 965- 972
doi: 10.1109/LRA.2018.2793349
|
|
|
| [8] |
GENEVA P, ECKENHOFF K, LEE W, et al. Openvins: a research platform for visual-inertial estimation [C]// 2020 IEEE International Conference on Robotics and Automation. Paris: IEEE, 2020: 4666-4672.
|
|
|
| [9] |
QIU X, ZHANG H, FU W Lightweight hybrid visual-inertial odometry with closed-form zero velocity update[J]. Chinese Journal of Aeronautics, 2020, 33 (12): 3344- 3359
doi: 10.1016/j.cja.2020.03.008
|
|
|
| [10] |
HUAI Z, HUANG G. Robocentric visual-inertial odometry [C]// 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid: IEEE, 2018: 6319-6326.
|
|
|
| [11] |
MA F, SHI J, YANG Y, et al ACK-MSCKF: tightly-coupled Ackermann multi-state constraint Kalman filter for autonomous vehicle localization[J]. Sensors, 2019, 19 (21): 4816
doi: 10.3390/s19214816
|
|
|
| [12] |
ZHENG F, TSAI G, ZHANG Z, et al. Trifo-VIO: robust and efficient stereo visual inertial odometry using points and lines [C]// 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid: IEEE, 2018: 3686-3693.
|
|
|
| [13] |
BAVLE H, MANTHE S, DE L P P, et al. Stereo visual odometry and semantics based localization of aerial robots in indoor environments [C]// 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid: IEEE, 2018: 1018-1023.
|
|
|
| [14] |
LEVINSON J, MONTEMERLO M, THRUN S. Map-based precision vehicle localization in urban environments [C]// Robotics: Science and Systems. Atlanta: [s. n.], 2007: 1.
|
|
|
| [15] |
LEVINSON J, THRUN S. Robust vehicle localization in urban environments using probabilistic maps [C]// 2010 IEEE International Conference on Robotics and Automation. Anchorage: IEEE, 2010: 4372-4378.
|
|
|
| [16] |
QIN T, LI P, SHEN S Vins-mono: a robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34 (4): 1004- 1020
doi: 10.1109/TRO.2018.2853729
|
|
|
| [17] |
QIN T, SHEN S. Online temporal calibration for monocular visual-inertial systems [C]// 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid: IEEE, 2018: 3662-3669.
|
|
|
| [18] |
徐晓苏, 代维, 杨博, 等 室内环境下基于图优化的视觉惯性SLAM方法[J]. 中国惯性技术学报, 2017, 25 (3): 313- 319
XU Xiao-su, DAI Wei, YANG Bo, et al Visual-aid inertial SLAM method based on graph optimization in indoor[J]. Journal of Chinese Inertial Technology, 2017, 25 (3): 313- 319
|
|
|
| [19] |
HARRIS C G, STEPHENS M. A combined corner and edge detector [C]// Alvey Vision Conference. Manchester: [s. n.], 1988: 10-5244.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|