|
|
|
| Vision-based localization and navigation for UAV inspection in photovoltaic farms |
Zhi-peng XI( ),Zhuo LOU,Xiao-xia LI,Yan SUN,Qiang YANG*(),Wen-jun YAN ),Zhuo LOU,Xiao-xia LI,Yan SUN,Qiang YANG*(),Wen-jun YAN |
| College of Electrical Engineering, Zhejiang University, Hangzhou 310027, China |
|
|
|
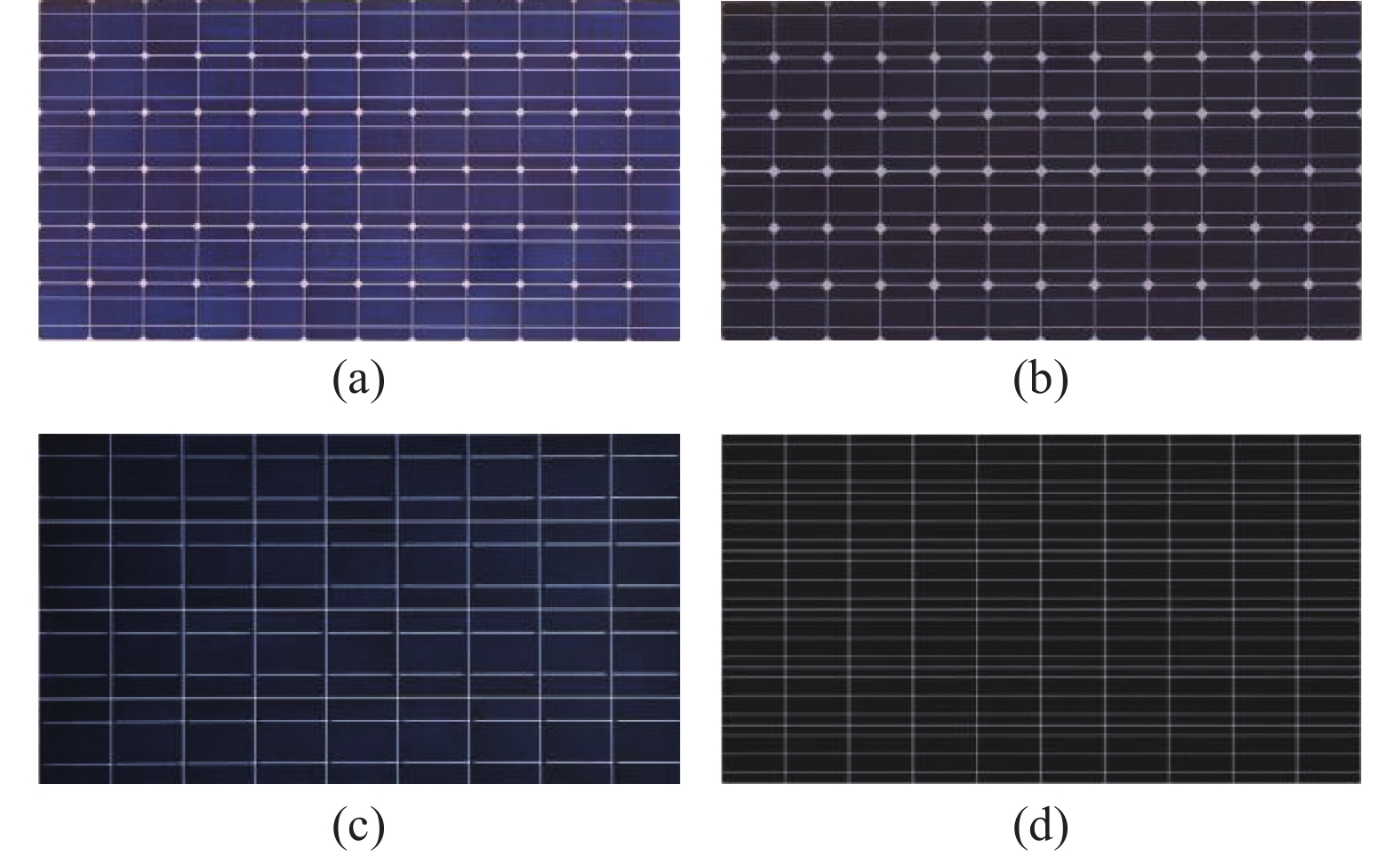
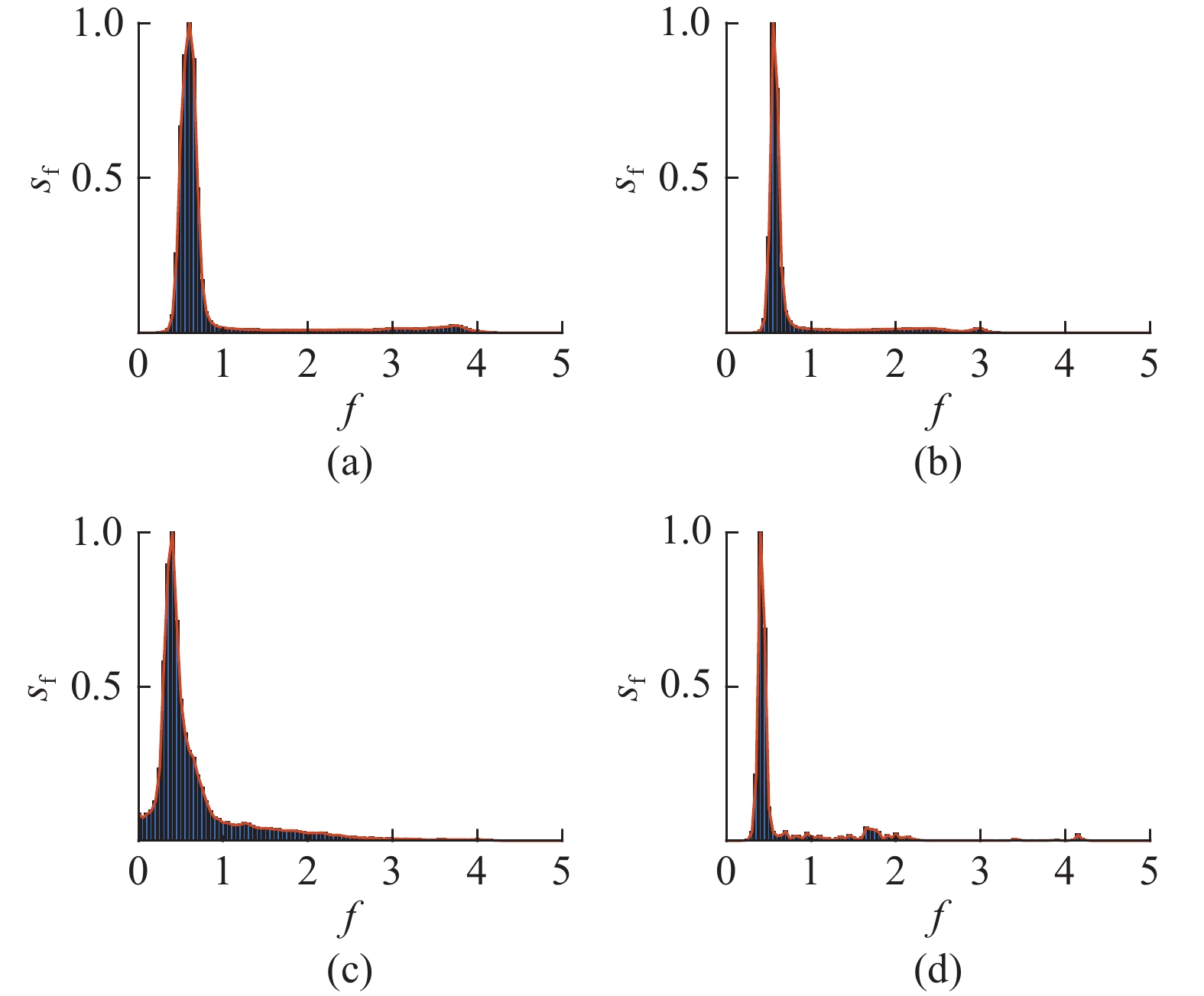
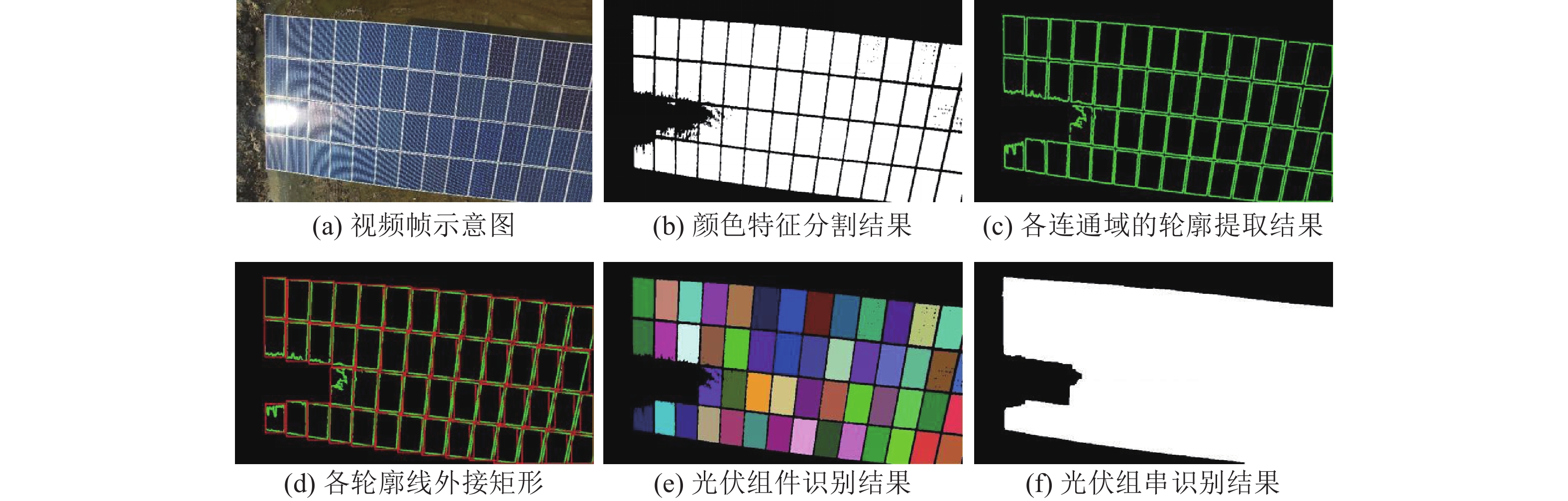
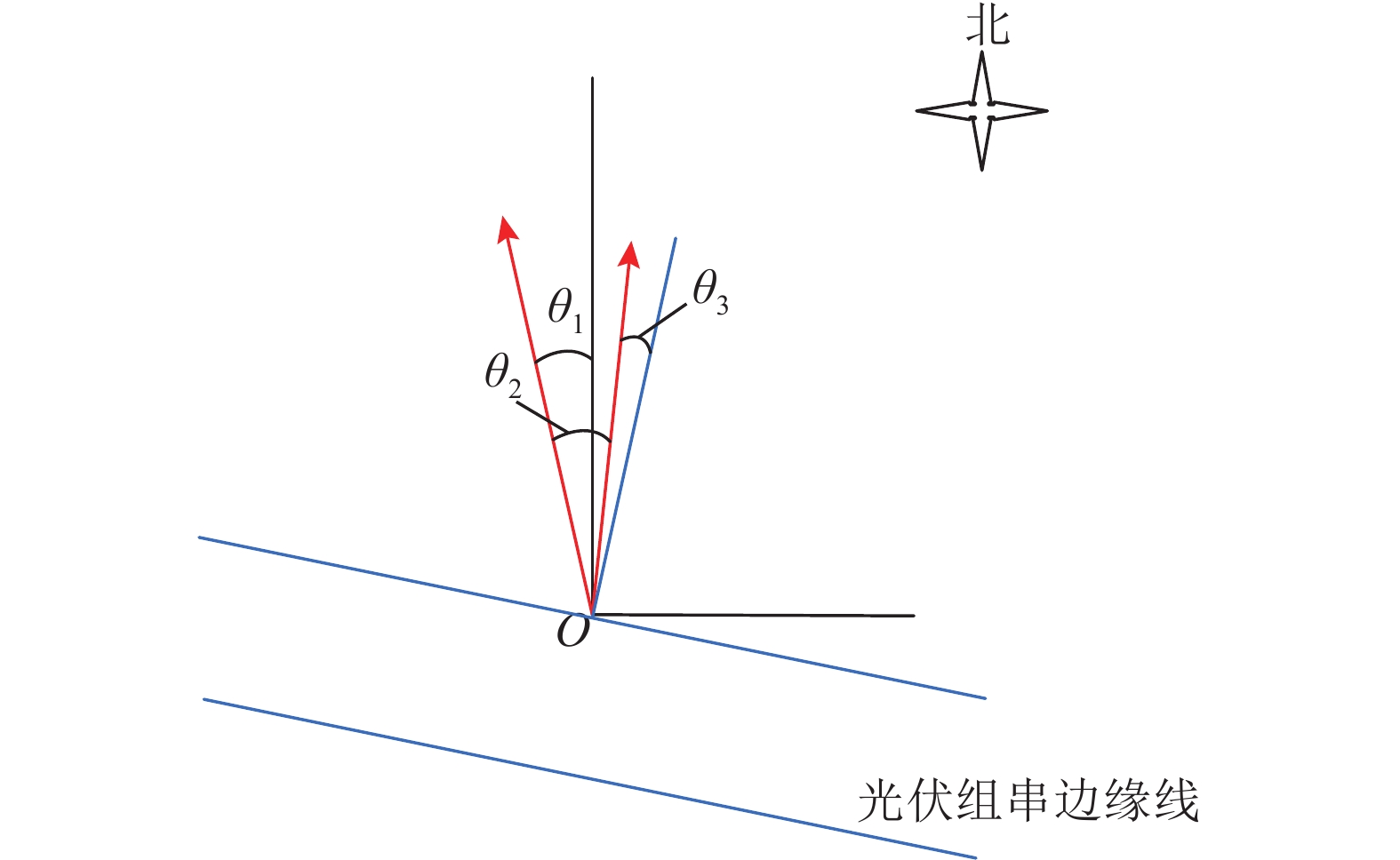
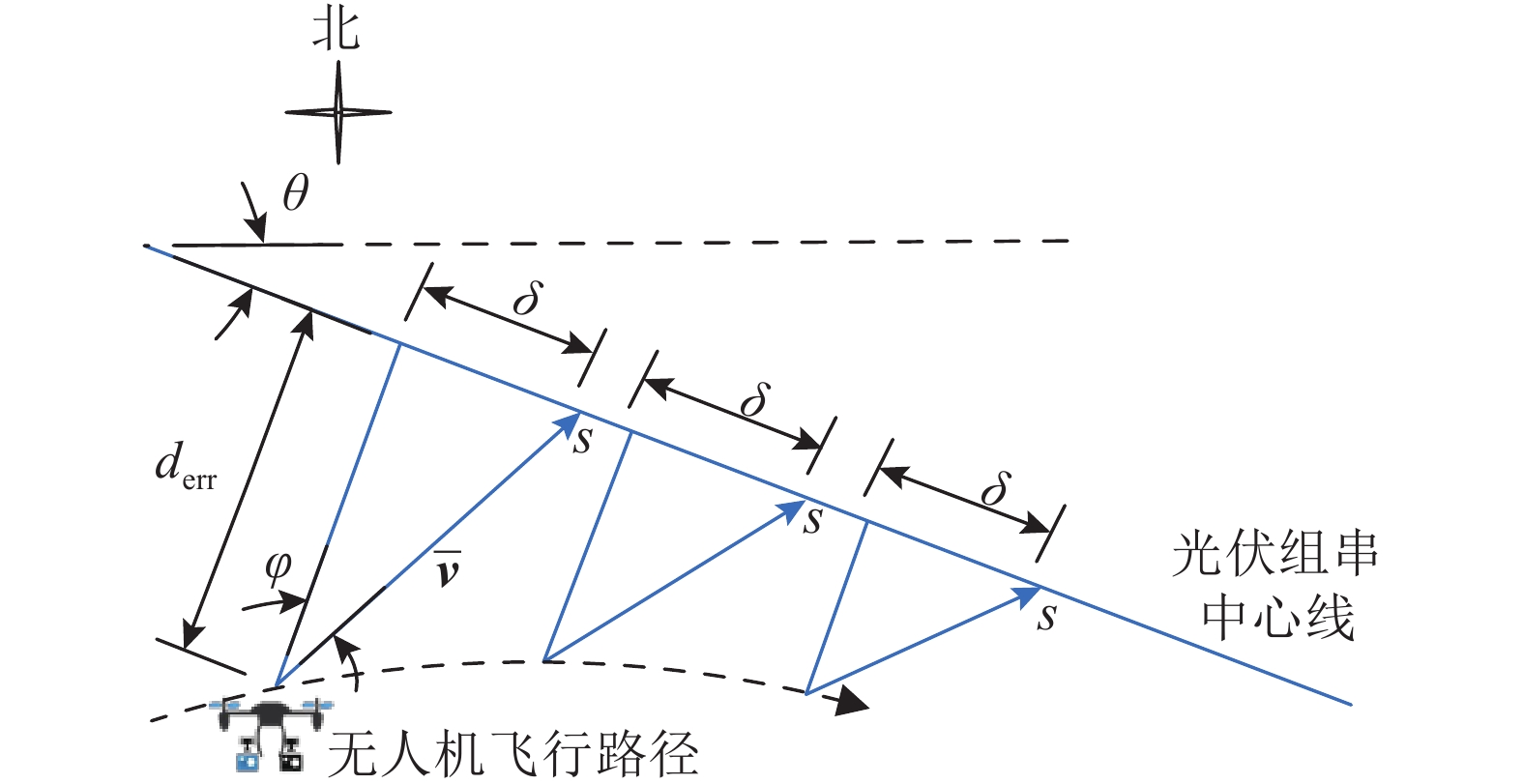
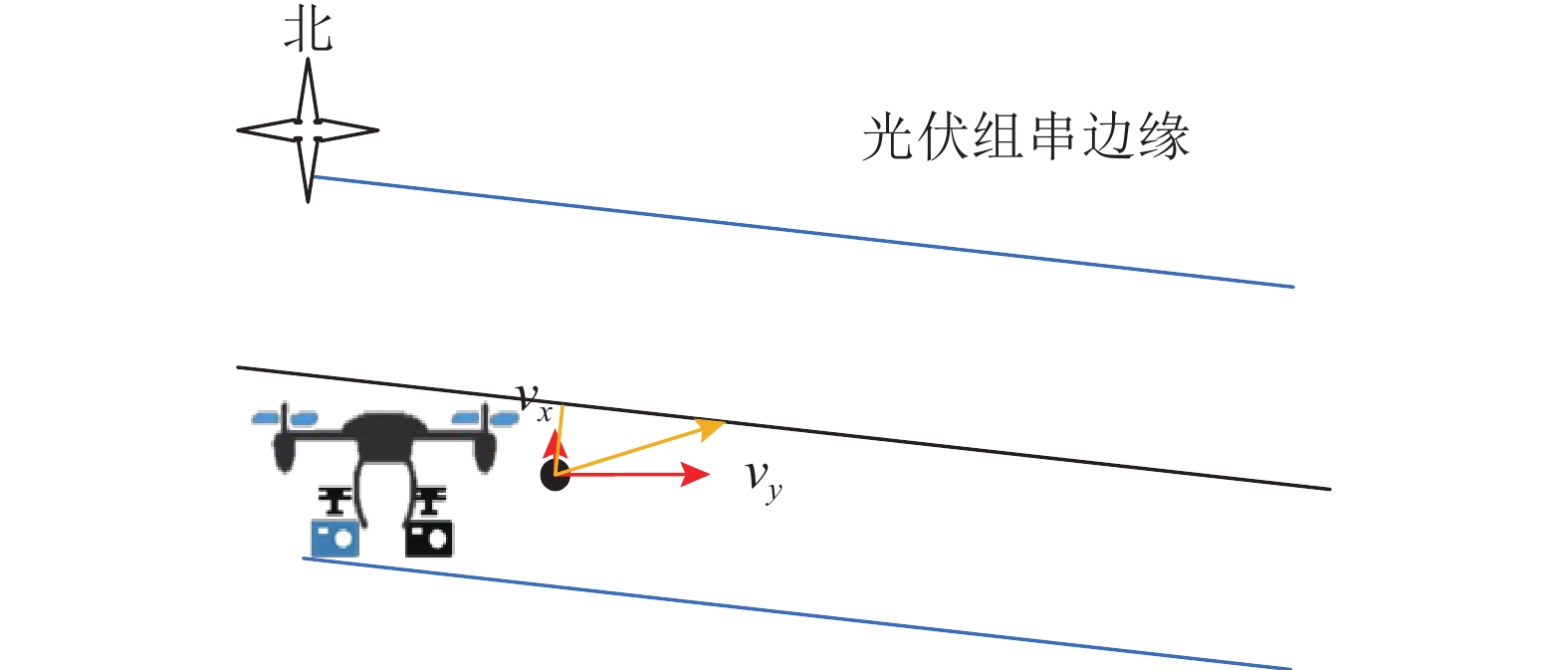
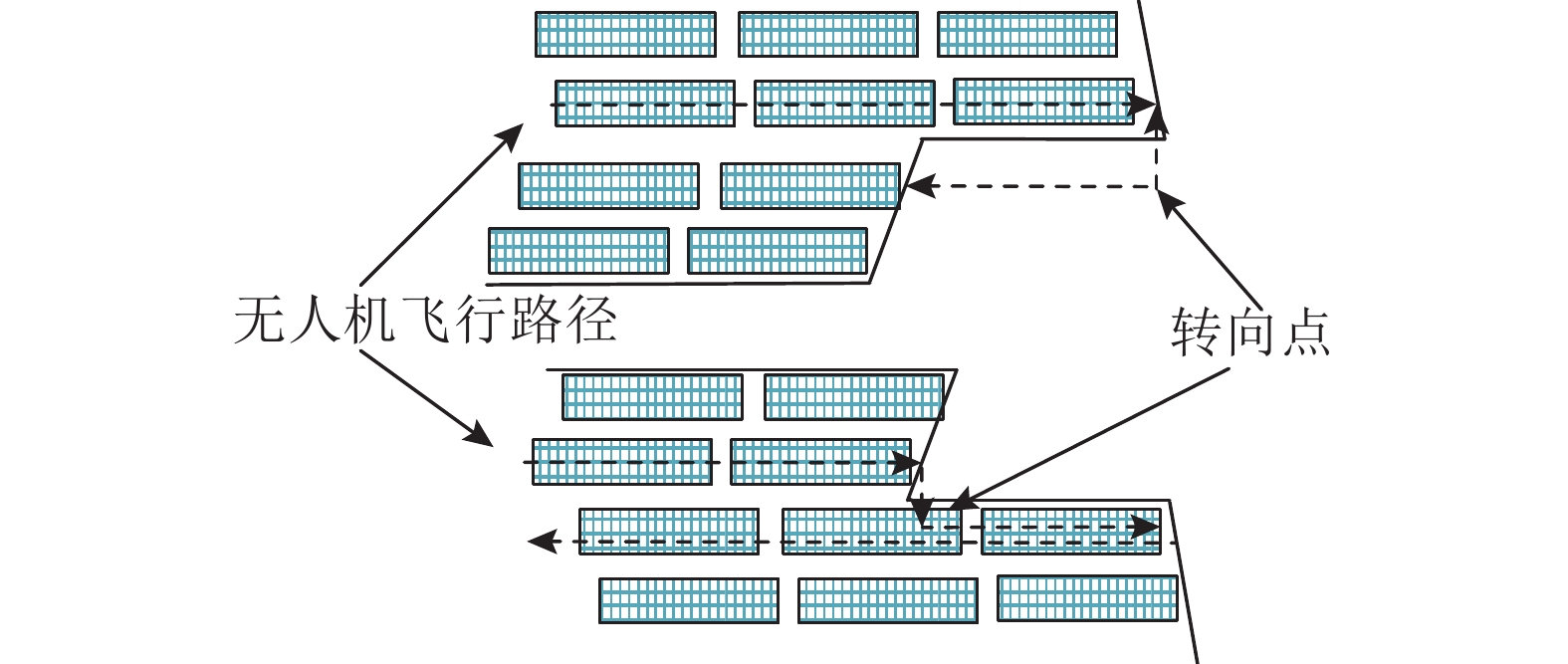
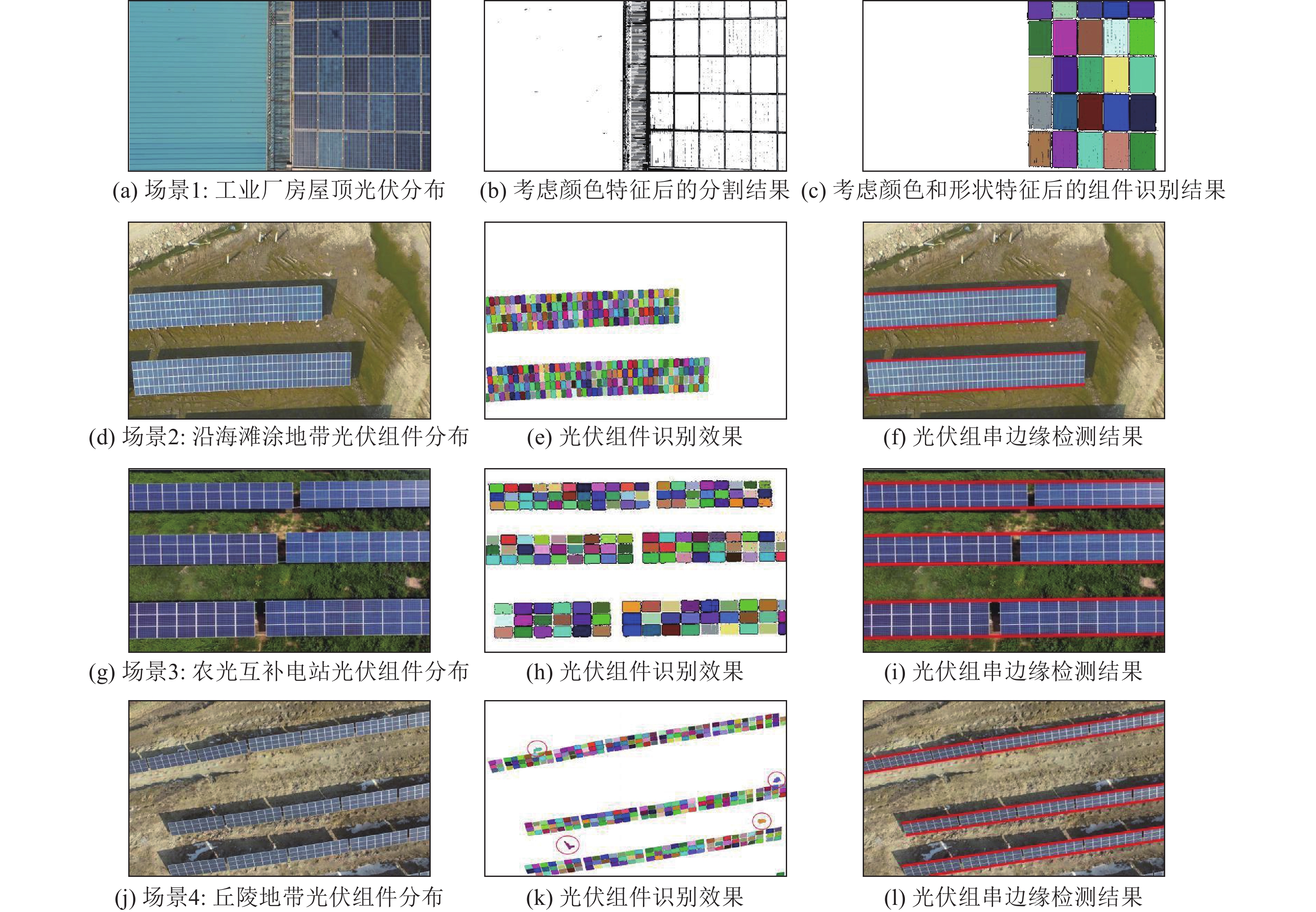
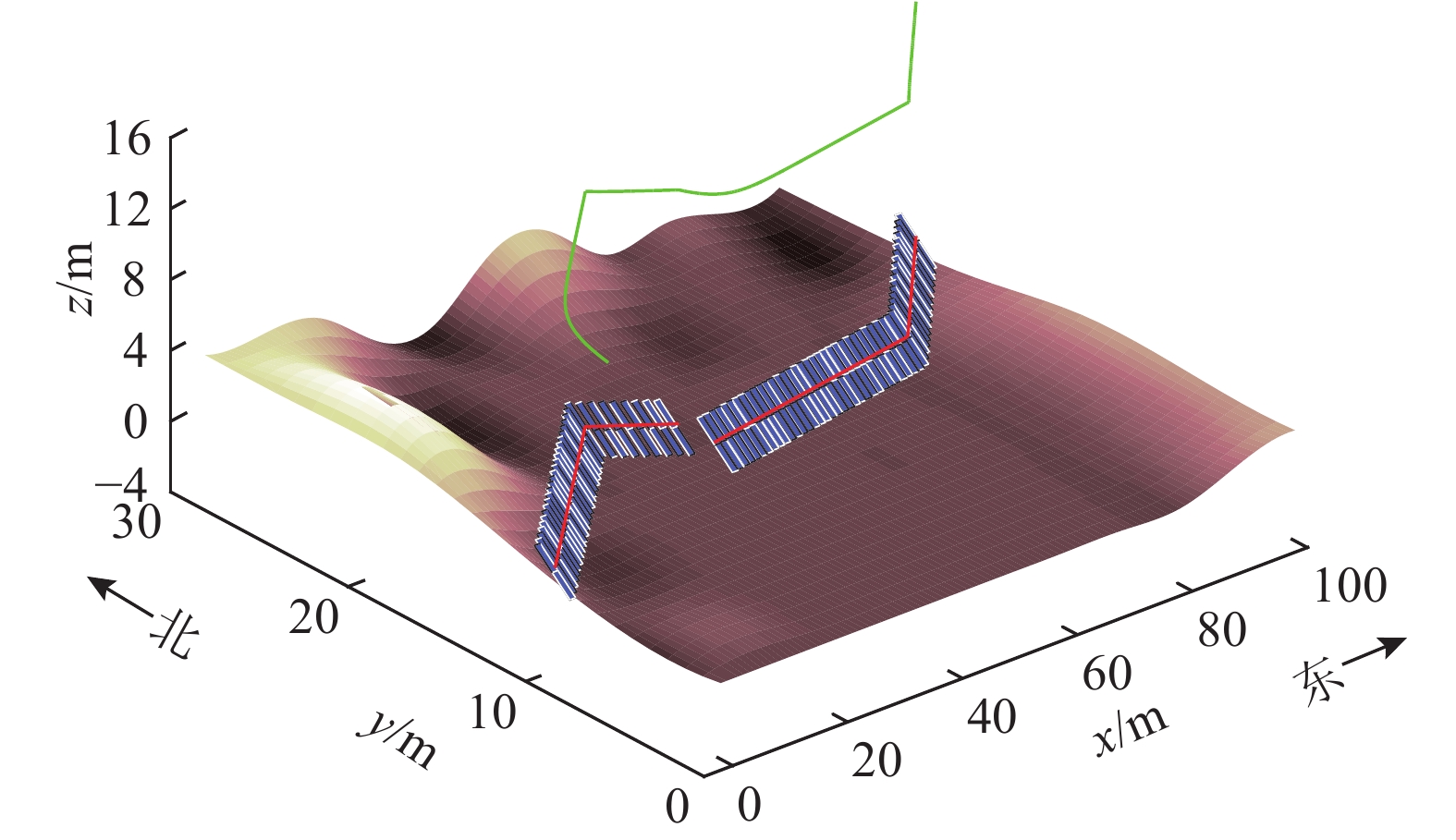
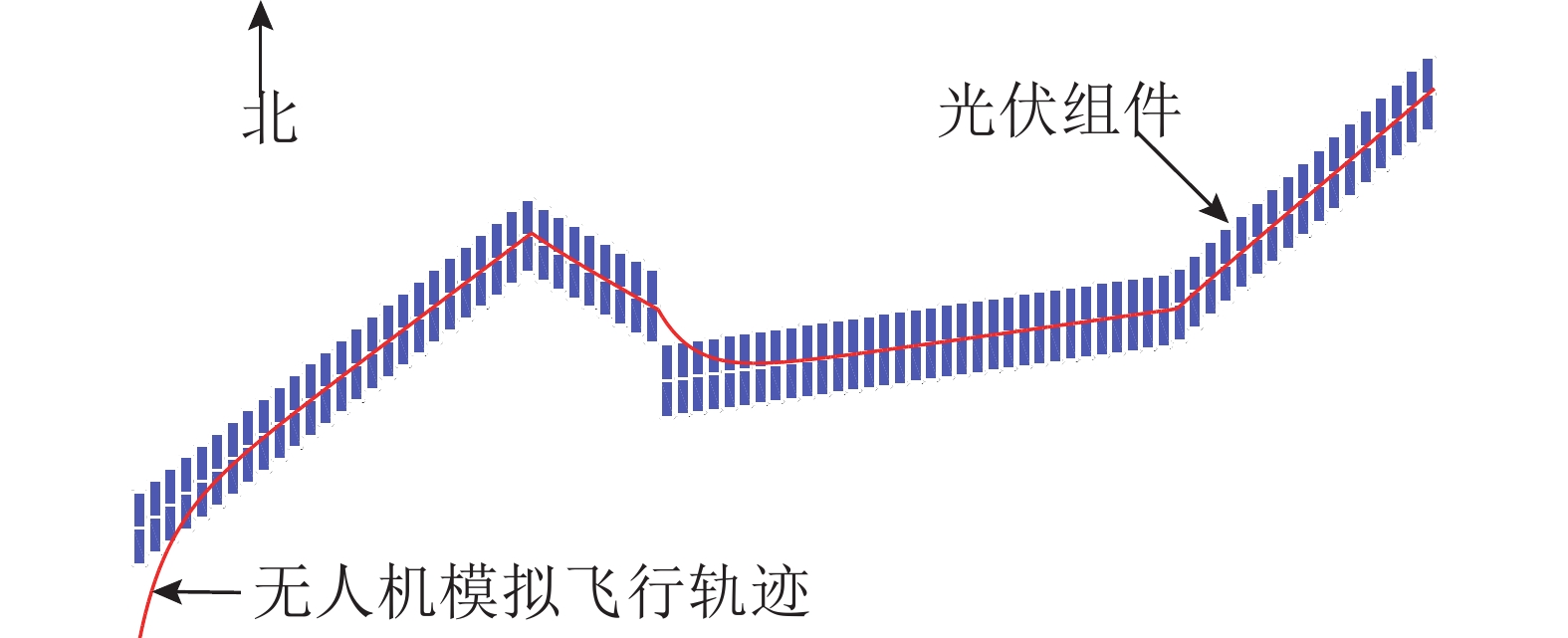
Abstract In order to achieve autonomous flight for unmanned aerial vehicles (UAVs) in PV farms and complete infrared and visible-light image acquisition, an edge detecting method for photovoltaic (PV) strings was proposed and the line of sight guidance based path following control algorithm was carried out according to the distribution characteristics of PV strings. Color variance widely existes among different PV modules in the same PV farm, based on which a custom color segmentation technique was put forward. This technique could be combined with shape features to realize accurate identification for PV modules. Theoretical flight paths could be gained through contour and edge information of PV strings after which the line of sight guidance method was applied to accurate trajectory tracking control for theoretical path to guarantee the effectiveness and integrity of image data acquisition. Results showed that the proposed recognition algorithm for PV strings was excellent in adaptability and instantaneity and could be used to calculate the theoretical flight direction of UAV and the offsets between the UAV and PV strings, and the ideal trajectory tracking for PV strings can be realized through the navigation control algorithm. The identification approach for PV strings and the line of sight guidance method can work well in localization and navigation respectively, and combination of the two procedures can meet the requirements of UAV flight control.
|
|
Received: 26 June 2018
Published: 17 May 2019
|
|
|
|
Corresponding Authors:
Qiang YANG
E-mail: xizhipeng@zju.edu.cn;qyang@zju.edu.cn
|
集中式光伏电站巡检无人机视觉定位与导航
为了使无人机在集中式光伏电站实现自主飞行,完成光伏组件红外及可见光图像采集任务,针对集中式光伏厂区光伏组串分布特点,提出光伏组串边缘检测方法,并通过视线导引法实现无人机路径跟随控制. 同一厂区的不同光伏组件之间存在颜色差异,针对其颜色特征提出自定义分割方法,结合形状特征可有效识别光伏组件;提取光伏组串轮廓和边缘信息可获取无人机理论飞行路径,通过视线导引法实现无人机对理论飞行路径的精准跟随以确保图像数据采集的有效性和完整性. 实验结果表明,提出的光伏组串识别算法具有较好的适应性和实时性,能够用于无人机理论飞行方向与无人机和光伏组串间偏移量的计算,利用导航控制算法能够实现理想的光伏组串循迹. 光伏组串识别算法和视线导引法能分别有效实现定位和导航,2个程序的结合能够满足无人机飞行控制要求.
关键词:
光伏巡检,
四旋翼无人机(UAV),
视觉定位,
路径跟随,
自主飞行
|
|
| [1] |
国家能源局. 国家能源局新闻发布会介绍2017年度相关能源情况等[EB/OL]. (2018-01-24)[2018-06-20]. http://www.nea.gov.cn/2018-01/24/c_136921015.htm.
|
|
|
| [2] |
YANG T W, YIN H, RUAN Q Q, et al. Overhead power line detection from UAV video images [C]// Mechatronics and Machine Vision in Practice. Auckland: IEEE, 2013: 74-79.
|
|
|
| [3] |
SARAPURA J A, ROBERTI F, CARELLI R, et al. Passivity based visual servoing of a UAV for tracking crop lines [C]// XVII Workshop on Information Processing and Control. Mar del Plata: IEEE, 2017: 1-6.
|
|
|
| [4] |
BRAND?O A S, MARTINS F N, SONEGUETTI H B. A vision-based line following strategy for an autonomous UAV [C]// International Conference on Informatics in Control, Automation and Robotics. Colmar: IEEE, 2015: 314-319.
|
|
|
| [5] |
HUANG H, ZHOU H, QIN H D, et al. Underwater vehicle visual servo and target grasp control [C]// IEEE International Conference on Robotics and Biomimetics. Qingdao: IEEE, 2017: 1619-1624.
|
|
|
| [6] |
HWANG C L, HUANG H H. Experimental validation of a car-like automated guided vehicle with trajectory tracking, obstacle avoidance, and target approach [C]// Conference of the IEEE Industrial Electronics Society. Beijing: IEEE, 2017: 2858-2863.
|
|
|
| [7] |
MARTINEZ C, SAMPEDRO C, CHAUHAN A, et al. Towards autonomous detection and tracking of electric towers for aerial power line inspection [C]// International Conference on Unmanned Aircraft Systems. Orlando: IEEE, 2014: 284-295.
|
|
|
| [8] |
LIU Y S, WANG Q X, HU H S, et al A novel real-time moving target tracking and path planning system for a quadrotor UAV in unknown unstructured outdoor scenes[J]. IEEE Transactions on Systems Man and Cybernetics Systems, 2018, 1- 11
|
|
|
| [9] |
LEIRA F S, JOHANSEN T A, FOSSEN T I. A UAV ice tracking framework for autonomous sea ice management [C]// International Conference on Unmanned Aircraft Systems. Miami: IEEE, 2017: 581-590.
|
|
|
| [10] |
YAN F L, LI B Q, SHI W X, et al Hybrid visual servo trajectory tracking of wheeled mobile robots[J]. IEEE Access, 2018, 6: 24291- 24298
doi: 10.1109/ACCESS.2018.2829839
|
|
|
| [11] |
XIAO S L, LI Y M Visual servo feedback control of a novel large working range micro manipulation system for microassembly[J]. Journal of Microelectromechanical Systems, 2014, 23 (1): 181- 190
doi: 10.1109/JMEMS.2013.2268849
|
|
|
| [12] |
ZHANG D, WU F J, LI X X, et al. Aerial image analysis based on improved adaptive clustering for photovoltaic module inspection [C]// International Smart Cities Conference. Wuxi: IEEE, 2017: 1-6.
|
|
|
| [13] |
WU F J, ZHANG D, LI X X, et al. Aerial image recognition and matching for inspection of large-scale photovoltaic farms [C]// Smart Cities Conference. Wuxi: IEEE, 2017: 1-6.
|
|
|
| [14] |
初广丽, 张伟, 王延杰, 等 基于机器视觉的水果采摘机器人目标识别方法[J]. 中国农机化学报, 2018, (2): 83- 88
CHU Guang-li, ZHANG Wei, WANG Yan-jie, et al A method of fruit picking robot target identification based on machine vision[J]. Journal of Chinese Agricultural Mechanization, 2018, (2): 83- 88
|
|
|
| [15] |
LI X H, ZHAO Y, ZHANG J, et al. A hybrid pso algorithm based flight path optimization for multiple agricultural UAVs [C]// International Conference on TOOLS with Artificial Intelligence. San Jose: IEEE, 2017: 691-697.
|
|
|
| [16] |
高海涛. UUV循迹跟踪与环境最优控位方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2014.
GAO Hai-Tao. Research on UUV path following and weather optimal dynamic position [D]. Harbin: Harbin Engineering University, 2014.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|