|
|
|
| Optimization of 3D multi-UAVs low altitude penetration based on bald eagle search algorithm |
Xialu WEN1,2( ),He HUANG1,2,*(),Huifeng WANG2,Lan YANG1,Tao GAO3 ),He HUANG1,2,*(),Huifeng WANG2,Lan YANG1,Tao GAO3 |
1. Xi’an Key Laboratory of Intelligent Expressway Information Fusion and Control, Chang’an University, Xi’an 710064, China
2. School of Electronics and Control Engineering, Chang’an University, Xi’an 710064, China
3. School of Data Science and Artificial Intelligence, Chang’an University, Xi’an 710064, China |
|
|
|
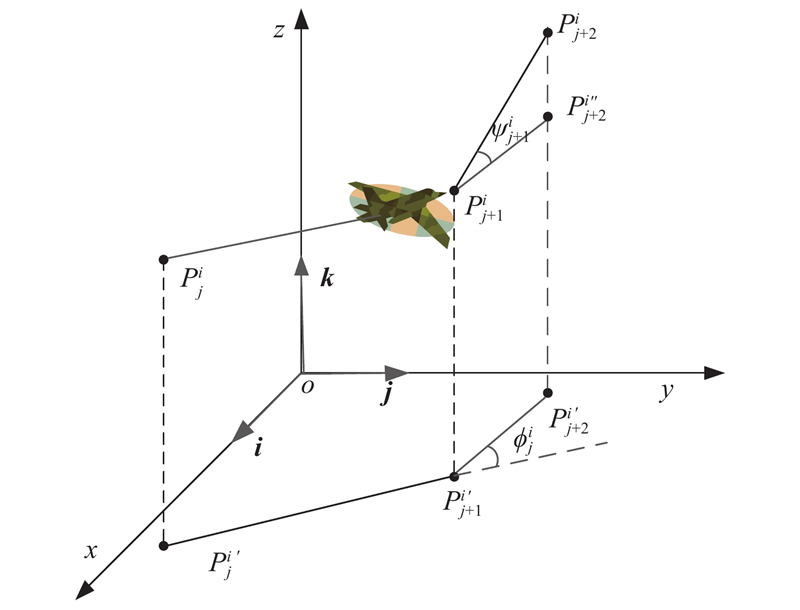
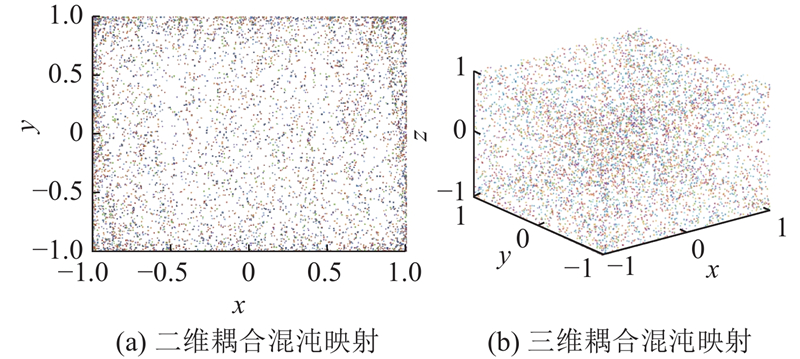
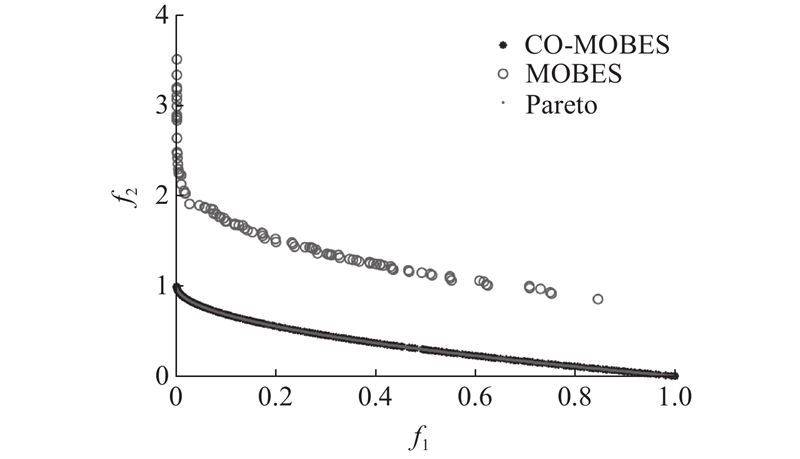
Abstract In response to the complex three-dimensional space environment and the high computational complexity of low altitude penetration path planning for multi-UAVs, the existing multi-objective bald eagle search algorithm has the shortcomings of easily approaching the center point and low accuracy. A 3D multi-UAVs low altitude penetration method based on the improved multi-objective bald eagle search algorithm (IMBES) was proposed. Models for the 3D environment, threat sources, UAV physical constraints, multi-UAVs cooperative constraints, and path smoothness were constructed to define a multi-objective cost function. A coupling chaotic mapping initialization was designed to enhance the quality of the initial population. An adaptive Gauss walk strategy based on the “scout eagle” was devised to balance development and search capabilities. Fast non-dominated sorting was introduced to further enhance algorithm efficiency. By leveraging the correspondence between the bald eagle position and UAV speed, turning angle, and climbing angle, the IMBES efficiently explored the UAV configuration space to identify the optimal Pareto front. Experimental results showed that the success rate of the IMBES was 70.5%. Compared with existing path planning methods, the proposed method demonstrates strong optimization capabilities and low energy consumption, making it suitable for collaborative low-altitude penetration by multiple UAVs.
|
|
Received: 18 October 2023
Published: 27 September 2024
|
|
|
| Fund: 国家自然科学基金资助项目(52172324,52172379);中央高校基本科研业务费专项资金重点科研平台建设计划水平提升项目(300102324501);西安市智慧高速公路信息融合与控制重点实验室(长安大学)开放基金资助项目(300102323502). |
|
Corresponding Authors:
He HUANG
E-mail: 2022132053@chd.edu.cn;huanghe@chd.edu.cn
|
基于秃鹰搜索算法优化的三维多无人机低空突防
三维空间环境复杂,多无人机的低空突防航迹规划计算量大,现有多目标秃鹰搜索算法存在求解易趋于中心点及精度低的缺陷,为此提出基于改进多目标秃鹰搜索算法(IMBES)的三维多无人机低空突防方法. 构建三维环境模型、威胁源模型、无人机物理约束模型、多无人机协同约束模型以及路径平滑度约束模型,确定多目标代价函数. 设计耦合混沌映射初始化,有效提高初始化种群质量;设计基于“侦察鹰”的自适应高斯游走策略,平衡开发与搜索能力;引入快速非支配排序,进一步提高算法效率. 利用秃鹰位置与无人机速度、转弯角度、爬升角度的对应关系,采用IMBES高效搜索无人机构型空间,找到最优的帕累托前沿. 实验结果表明,IMBES的成功率为70.5%. 与现有路径规划方法相比,所提方法的优化能力强、能耗低,适用于多无人机协同低空突防.
关键词:
多无人机,
低空突防,
自主避障,
多目标算法,
秃鹰搜索算法
|
|
| [1] |
ZHANG Z, WU J, DAI J, et al A novel real-time penetration path planning algorithm for stealth UAV in 3D complex dynamic environment[J]. IEEE Access, 2020, 8: 122757- 122771
doi: 10.1109/ACCESS.2020.3007496
|
|
|
| [2] |
王建峰, 贾高伟, 郭正, 等. 多无人机协同任务规划方法研究综述[EB/OL]. (2023−04−19)[2024−07−29]. https://kns.cnki.net/kcms/detail/11.2422.TN.20230419.1331.010.html.
|
|
|
| [3] |
PUENTE-CASTRO A, RIVERO D, PAZOS A, et al A review of artificial intelligence applied to path planning in UAV swarms[J]. Neural Computing and Applications, 2022, 34: 153- 170
doi: 10.1007/s00521-021-06569-4
|
|
|
| [4] |
YU X, LI C, YEN G G A knee-guided differential evolution algorithm for unmanned aerial vehicle path planning in disaster management[J]. Applied Soft Computing, 2021, 98: 106857
doi: 10.1016/j.asoc.2020.106857
|
|
|
| [5] |
HUO L, ZHU J, WU G, et al A novel simulated annealing based strategy for balanced UAV task assignment and path planning[J]. Sensors, 2020, 20 (17): 4769
doi: 10.3390/s20174769
|
|
|
| [6] |
YANG L, GUO J, LIU Y Three-dimensional UAV cooperative path planning based on the MP-CGWO algorithm[J]. International Journal of Innovative Computing, Information and Control, 2020, 16 (3): 991- 1006
|
|
|
| [7] |
PAN J, LIU N, CHU S A hybrid differential evolution algorithm and its application in unmanned combat aerial vehicle path planning[J]. IEEE Access, 2020, 8: 17691- 17712
doi: 10.1109/ACCESS.2020.2968119
|
|
|
| [8] |
黄鹤, 李潇磊, 杨澜, 等 引入改进蝠鲼觅食优化算法的水下无人航行器三维路径规划[J]. 西安交通大学学报, 2022, 56 (7): 9- 18
HUANG He, LI Xiaolei, YANG Lan, et al Three dimensional path planning of unmanned underwater vehicle based on improved manta ray foraging optimization algorithm[J]. Journal of Xi’an Jiaotong University, 2022, 56 (7): 9- 18
doi: 10.7652/xjtuxb202207002
|
|
|
| [9] |
EUN Y, BANG H Cooperative task assignment/path planning of multiple unmanned aerial vehicles using genetic algorithm[J]. Journal of Aircraft, 2009, 46 (1): 338- 343
doi: 10.2514/1.38510
|
|
|
| [10] |
杜云, 彭瑜, 邵士凯, 等 基于改进粒子群优化的多无人机协同航迹规划[J]. 科学技术与工程, 2020, 20 (32): 13258- 13264
DU Yun, PENY Yu, SHAO Shikai, et al Cooperative path planning of multi-unmanned aerial vehicle based on improved particle swarm optimization[J]. Science Technology and Engineering, 2020, 20 (32): 13258- 13264
doi: 10.3969/j.issn.1671-1815.2020.32.025
|
|
|
| [11] |
闫少强, 杨萍, 刘卫东, 等. 基于GPSSA算法的复杂地形多无人机航迹规划[EB/OL]. (2023–04–12)[2024–07–29]. https://doi.org/10.13700/j.bh.1001-5965.2022.0984.
|
|
|
| [12] |
袁梦顺, 陈谋, 吴庆宪 基于NSGA-III算法的多无人机协同航迹规划[J]. 吉林大学学报: 信息科学版, 2021, 39 (3): 295- 302
YUAN Mengshun, CHEN Mou, WU Qingxian Cooperative path planning for multiple UAVs based on NSGA-III algorithm[J]. Journal of Jilin University: Information Science Edition, 2021, 39 (3): 295- 302
|
|
|
| [13] |
ALSATTAR H A, ZAIDAN A A, ZAIDAN B B Novel meta-heuristic bald eagle search optimisation algorithm[J]. Artificial Intelligence Review, 2020, 53: 2237- 2264
doi: 10.1007/s10462-019-09732-5
|
|
|
| [14] |
YANG C, TSAI M, KANG S, et al UAV path planning method for digital terrain model reconstruction: a debris fan example[J]. Automation in Construction, 2018, 93: 214- 230
doi: 10.1016/j.autcon.2018.05.024
|
|
|
| [15] |
RADMANESH M, KUMAR M, GUENTERT P H, et al Overview of path-planning and obstacle avoidance algorithms for UAVs: a comparative study[J]. Unmanned Systems, 2018, 6 (2): 95- 118
doi: 10.1142/S2301385018400022
|
|
|
| [16] |
WAHAB S H A, CHEKIMA A, SAAD N, et al. Path planning of UAV based on fluid computing via accelerated method [J]. International Journal of Engineering Trends and Technology , 2020, 76–80.
|
|
|
| [17] |
黄鹤, 李文龙, 吴琨, 等 基于ALCE-SSA优化的三维无人机低空突防[J]. 南京大学学报: 自然科学, 2022, 58 (3): 448- 459
HUANG He, LI Wenlong, WU Kun, et al 3D UAV low altitude penetration optimization based on ALCE-SSA[J]. Journal of Nanjing University: Natural Science, 2022, 58 (3): 448- 459
|
|
|
| [18] |
PHUNG M D, HA Q P Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization[J]. Applied Soft Computing, 2021, 107: 107376
doi: 10.1016/j.asoc.2021.107376
|
|
|
| [19] |
周德云, 王鹏飞, 李枭扬, 等 基于多目标优化算法的多无人机协同航迹规划[J]. 系统工程与电子技术, 2017, 39 (4): 782- 787
ZHOU Deyun, WANG Pengfei, LI Xiaoyang, et al Cooperative path planning of multi-UAV based on multi-objective optimization algorithm[J]. Systems Engineering and Electronics, 2017, 39 (4): 782- 787
doi: 10.3969/j.issn.1001-506X.2017.04.13
|
|
|
| [20] |
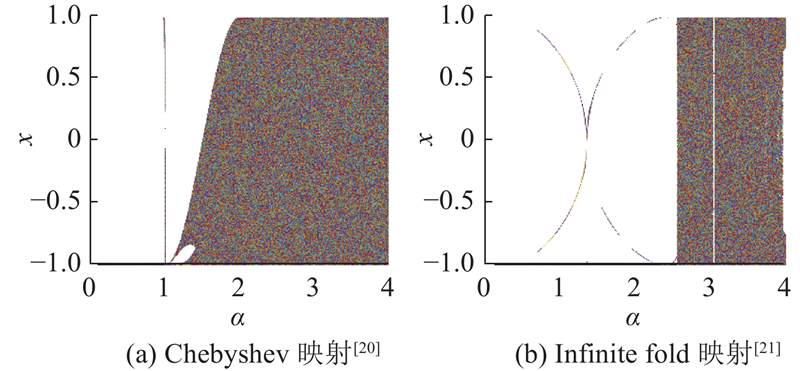
SHAKIBA A A novel randomized one-dimensional chaotic Chebyshev mapping for chosen plaintext attack secure image encryption with a novel chaotic breadth first traversal[J]. Multimedia Tools and Applications, 2019, 78 (24): 34773- 34799
doi: 10.1007/s11042-019-08071-5
|
|
|
| [21] |
邱跃洪, 何晨, 诸鸿文 一种有限区间内无限折叠的混沌映射[J]. 高技术通讯, 2002, (9): 12- 15
QIU Yuehong, HE Chen, ZHU Hongwen A one-dimensional chaotic map with infinite collapses[J]. Chinese High Technology Letters, 2002, (9): 12- 15
doi: 10.3321/j.issn:1002-0470.2002.09.003
|
|
|
| [22] |
XUE J, SHEN B A novel swarm intelligence optimization approach: sparrow search algorithm[J]. Systems Science and Control Engineering, 2020, 8 (1): 22- 34
doi: 10.1080/21642583.2019.1708830
|
|
|
| [23] |
TROJOVSKÝ P, DEHGHANI M Pelican optimization algorithm: a novel nature-inspired algorithm for engineering applications[J]. Sensors, 2022, 22 (3): 855
doi: 10.3390/s22030855
|
|
|
| [24] |
NEGI G, KUMAR A, PANT S, et al GWO: a review and applications[J]. International Journal of System Assurance Engineering and Management, 2021, 12: 1- 8
|
|
|
| [25] |
XUE J, SHN B Dung beetle optimizer: a new meta-heuristic algorithm for global optimization[J]. The Journal of Supercomputing, 2023, 79: 7305- 7336
doi: 10.1007/s11227-022-04959-6
|
|
|
| [26] |
LIU T, YUAN Q, DING X, et al Multi-objective optimization for greenhouse light environment using Gaussian mixture model and an improved NSGA-II algorithm[J]. Computers and Electronics in Agriculture, 2023, 205: 107612
|
|
|
| [27] |
戴晓晖, 李敏强, 寇纪淞 遗传算法的性能分析研究[J]. 软件学报, 2001, 12 (5): 742- 750
DAI Xiaohui, LI Minqiang, KOU Jisong Study on the performance analysis of genetic algorithm[J]. Journal of Software, 2001, 12 (5): 742- 750
|
|
|
| [28] |
Geoscience Australia. Digital elevation model (DEM) of Australia derived from LiDAR 5 metre grid [DB/OL]. [2024–07–29]. https://doi.org/10.26186/89644.
|
|
|
| [29] |
MA M, WU J, SHI Y, et al Research on multi-aircrafts cooperative arraying to jam based on multi-objective moth-flame optimization algorithm[J]. IEEE Access, 2022, 10: 80539- 80554
doi: 10.1109/ACCESS.2022.3193094
|
|
|
| [30] |
YI J, XING L, WANG G, et al. Behavior of crossover operators in NSGA-III for large-scale optimization problems [J]. Information Sciences , 2020, 509: 470–487.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|