|
|
|
| 3D path planning of plant protection UAVs in hilly mountainous orchards |
Shaomeng YU1,2( ),Ming YAN1,Pengfei WANG1,2,*(),Jianxi ZHU3,Xin YANG1 ),Ming YAN1,Pengfei WANG1,2,*(),Jianxi ZHU3,Xin YANG1 |
1. College of Mechanical and Electrical Engineering, Hebei Agricultural University, Baoding 071001, China
2. Technology Innovation Center of Intelligent Agricultural Equipment, Baoding 071001, China
3. Zhejiang Agricultural Machinery Research Institute, Jinhua 321000, China |
|
|
|
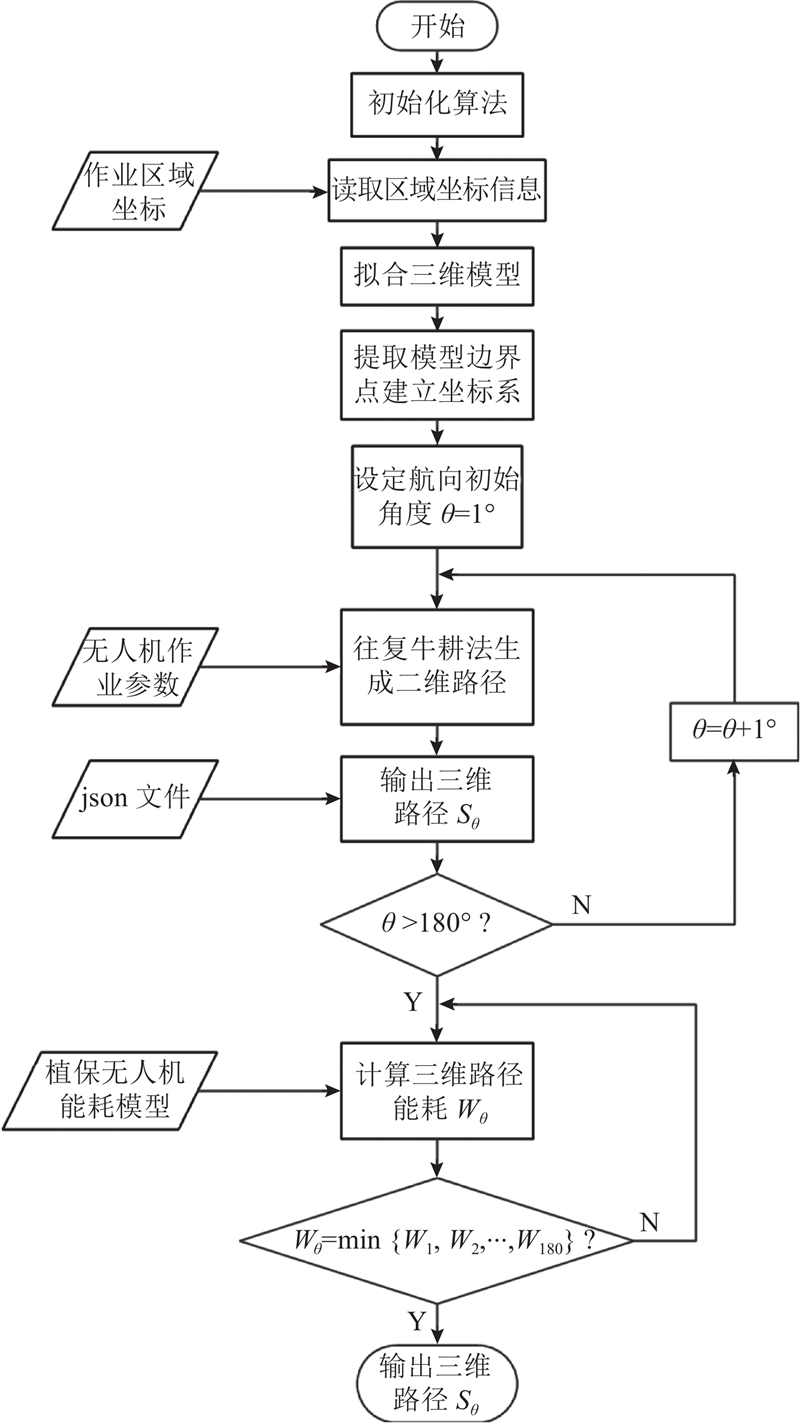
Abstract A full-coverage 3D path planning method for mountainous orchard plant protection UAVs was proposed to address the challenges of manual control and the lack of 3D path planning for plant protection drones operating in hilly orchards. 3D coordinates of the operation area obtained from a real scene 3D model of the area were utilized. Comprehensive 3D path planning for plant protection UAVs was carried out based on the reciprocating cattle farming method and the real scene 3D model of the hilly orchard. An energy consumption model for the UAV was constructed, considering its movement status and load changes. The operating heading angle (ranging from 1° to 180°) was optimized to determine the path with minimal energy consumption. Results of field experiments showed that the path with the minimal energy consumption (heading angle of 91°) reduced the total energy consumption by 20.88% and the time required to complete the plant protection operation by 16.31%, compared to the path with the maximum energy consumption (heading angle of 147°). The fluctuation in canopy droplet deposition at each sampling point within the operation area was minimal. This method not only optimizes the energy consumption and improves the operational efficiency, but also ensures full coverage of plant protection within the working area.
|
|
Received: 01 January 2024
Published: 10 March 2025
|
|
|
| Fund: 国家现代农业产业技术体系资助项目(CARS-27);金华市科技计划资助项目(2021-2-016). |
|
Corresponding Authors:
Pengfei WANG
E-mail: ysmaabb@163.com;wpf5769@126.com
|
丘陵山地果园植保无人机三维路径规划
丘陵地区果园植保无人机作业时人工操控难度大,自动作业缺少三维路径规划,为此提出山地果园植保无人机全覆盖三维作业路径规划方法. 利用实景三维模型获取作业区域三维坐标,基于往复牛耕法和丘陵果园实景三维模型,进行植保无人机全覆盖三维路径规划. 考虑植保无人机运动状况及自身载重变化,构建植保无人机能量消耗模型,进而对作业航向角(1°~180°)进行寻优,获得最小能耗的作业路径. 田间试验表明,最小能耗的作业路径(航向角为91°)相比于最大能耗的作业路径(航向角为147°)降低了完成植保作业所需总能耗(能耗降低率为20.88%),缩短了完成植保作业所需时间(时间降低率为16.31%),且作业区域内各采样点的冠层雾滴沉积量波动较小,在优化能耗、提高作业效率的同时实现了对作业区域的全覆盖植保作业.
关键词:
植保无人机,
路径规划,
山地果园,
作业航向角,
能耗
|
|
| [1] |
郑永军, 江世界, 陈炳太, 等 丘陵山区果园机械化技术与装备研究进展[J]. 农业机械学报, 2020, 51 (11): 1- 20
ZHENG Yongjun, JIANG Shijie, CHEN Bingtai, et al Research progress of orchard mechanization technology and equipment in hilly and mountainous areas[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51 (11): 1- 20
doi: 10.6041/j.issn.1000-1298.2020.11.001
|
|
|
| [2] |
郑永军, 陈炳太, 吕昊暾, 等 中国果园植保机械化技术与装备研究进展[J]. 农业工程学报, 2020, 36 (20): 110- 124
ZHENG Yongjun, CHEN Bingtai, LV Haotun, et al Research progress of orchard plant protection mechanization technology and equipment in orchards in China[J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36 (20): 110- 124
doi: 10.11975/j.issn.1002-6819.2020.20.014
|
|
|
| [3] |
王士林, 范道全, 李雪, 等 果园喷雾机具对施药人员体表污染的影响[J]. 生态与农村环境学报, 2020, 36 (12): 1612- 1618
WANG Shilin, FAN Daoquan, LI Xue, et al Effect of orchard sprayers on dermal exposure of operators[J]. Journal of Ecology and Rural Environment, 2020, 36 (12): 1612- 1618
|
|
|
| [4] |
温靖, 郭黎, 朱逸铭. 中国农业的未来有多美——专访国家精准农业航空施药技术国际联合研究中心首席科学家兰玉彬院士[EB/OL]. [2024-12-01]. https://www.cnki.com.cn/Article/CJFDTotal-NSGJ202136001.htm
|
|
|
| [5] |
YU S, ZHU J, ZHOU J, et al Key technology progress of plant-protection UAVs applied to mountain orchards: a review[J]. Agronomy, 2022, 12 (11): 2828
doi: 10.3390/agronomy12112828
|
|
|
| [6] |
曹光乔, 李亦白, 南风, 等 植保无人机飞控系统与航线规划研究进展分析[J]. 农业机械学报, 2020, 51 (8): 1- 16
CAO Guangqiao, LI Yibai, NAN Feng, et al Development and analysis of plant protection UAV flight control system and route planning research[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51 (8): 1- 16
doi: 10.6041/j.issn.1000-1298.2020.08.001
|
|
|
| [7] |
王宇, 陈海涛, 李海川 基于引力搜索算法的植保无人机三维路径规划方法[J]. 农业机械学报, 2018, 49 (2): 28- 33
WANG Yu, CHEN Haitao, LI Haichuan 3D path planning approach based on gravitational search algorithm for sprayer UAV[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49 (2): 28- 33
doi: 10.6041/j.issn.1000-1298.2018.02.004
|
|
|
| [8] |
王宇, 王文浩, 徐凡, 等 基于改进蚁群算法的植保无人机路径规划方法[J]. 农业机械学报, 2020, 51 (11): 103- 112
WANG Yu, WANG Wenhao, XU Fan, et al Path planning approach based on improved ant colony optimization for sprayer UAV[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51 (11): 103- 112
doi: 10.6041/j.issn.1000-1298.2020.11.011
|
|
|
| [9] |
刘璐, 沈小伟, 葛超, 等 基于改进蚁群算法的植保无人机路径规划[J]. 计算机仿真, 2024, 41 (1): 39- 43
LIU Lu, SHEN Xiaowei, GE Chao, et al Path planning of plant protection UAV based on improved ant colony algorithm[J]. Computer Simulation, 2024, 41 (1): 39- 43
doi: 10.3969/j.issn.1006-9348.2024.01.009
|
|
|
| [10] |
严炜, 龙长江, 李善军 基于差分量子退火算法的农用无人机路径规划方法[J]. 华中农业大学学报, 2020, 39 (1): 180- 186
YAN Wei, LONG Changjiang, LI Shanjun path planning method for agricultural UAV based on DEQA algorithm[J]. Journal of Huazhong Agricultural University, 2020, 39 (1): 180- 186
|
|
|
| [11] |
张旭东, 于丽娅, 李少波, 等 元启发式算法在植保无人机路径规划中的研究进展[J]. 农机化研究, 2025, 47 (3): 1- 9
ZHANG Xudong, YU Liya, LI Shaobo, et al Research progress of metaheuristic algorithm in algorithms in path planning of plant protection UAV[J]. Journal of Agricultural Mechanization Research, 2025, 47 (3): 1- 9
|
|
|
| [12] |
DONG R, WANG S, WANG G, et al Hybrid optimization algorithm based on wolf pack search and local search for solving traveling salesman problem[J]. Journal of Shanghai Jiaotong University: Science, 2019, 24 (1): 41- 47
doi: 10.1007/s12204-019-2039-9
|
|
|
| [13] |
徐博, 陈立平, 徐旻, 等 多作业区域植保无人机航线规划算法[J]. 农业机械学报, 2017, 48 (2): 75- 81
XU Bo, CHEN Liping, XU Min, et al Path planning algorithm for plant protection UAVs in multiple operation areas[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48 (2): 75- 81
doi: 10.6041/j.issn.1000-1298.2017.02.010
|
|
|
| [14] |
陶德臣, 祖家奎, 高尚文 基于全覆盖路径的植保无人直升机航线规划方法与实现技术[J]. 电子测量技术, 2020, 43 (7): 50- 55
TAO Dechen, ZU Jiakui, GAO Shangwen Planning method and implementation technology of plant protection unmanned helicopter route based on full coverage path[J]. Electronic Measurement Technology, 2020, 43 (7): 50- 55
|
|
|
| [15] |
陶德臣. 植保无人直升机航线规划方法与实现技术研究[D]. 南京: 南京航空航天大学, 2021.
TAO Dechen. Research on route planning method and implementation technology of plant protection unmanned helicopter. [D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2021.
|
|
|
| [16] |
杨润书, 马燕燕, 殷海舟. 低空无人机航摄系统地面分辨率与航高的关系研究[J]. 地矿测绘, 2013, 29(3): 1-2.
Yang Runshu, Ma Yanyan, Yin Haizhou. Relationship between ground resolution and flying height about the low altitude unmanned aerial vehicle aerophotographic system [J]. Surveying and Mapping of Geology and Mineral Resources . 2013, 29(3): 1–2.
|
|
|
| [17] |
王宇, 王文浩, 徐凡, 等. 基于改进蚁群算法的植保无人机路径规划方法[J]. 农业机械学报, 2020, 51(11): 103–112.
WANG Yu, WANG Wenhao, XU Fan, et al. Path planning approach based on improved ant colony optimization for sprayer UAV [J]. Transactions of the Chinese Society for Agricultural Machinery , 2020, 51(11): 103−112.
|
|
|
| [18] |
徐博, 陈立平, 谭彧, 等 基于无人机航向的不规则区域作业航线规划算法与验证[J]. 农业工程学报, 2015, 31 (23): 173- 178
XU Bo, CHEN Liping, TAN Yu, et al Route planning algorithm and verification based on UAV operation path angle in irregular area[J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31 (23): 173- 178
doi: 10.11975/j.issn.1002-6819.2015.23.023
|
|
|
| [19] |
周莉萍. 无人机机载喷雾系统喷雾特性及影响因素的研究[D]. 杭州: 浙江大学, 2017.
ZHOU Liping. Research on spray characteristics and influencing factors of UAV airborne spray system [D]. Hangzhou: Zhejiang University, 2017.
|
|
|
| [20] |
边永亮, 李建平, 王鹏飞, 等 单旋翼无人机流场分布特征及作业性能试验研究[J]. 河北农业大学学报, 2020, 43 (3): 115- 120
BIAN Yongliang, LI Jianping, WANG Pengfei, et al Experimental study on distribution characteristics and operating performance of airflow field in single rotor UAV[J]. Journal of hebei agricultural university, 2020, 43 (3): 115- 120
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|