|
|
|
| Vehicle collision severity minimization strategy in unavoidable collision scenario |
Shencun YE1( ),Bing ZHOU1,*(),Tian CHAI1,Nianfei GAN1,Shuai HE2 ),Bing ZHOU1,*(),Tian CHAI1,Nianfei GAN1,Shuai HE2 |
1. State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body, Hunan University, Changsha 410082, China
2. Schaeffler Intelligent Driving Technology (Changsha) Limited Company, Changsha 410036, China |
|
|
|
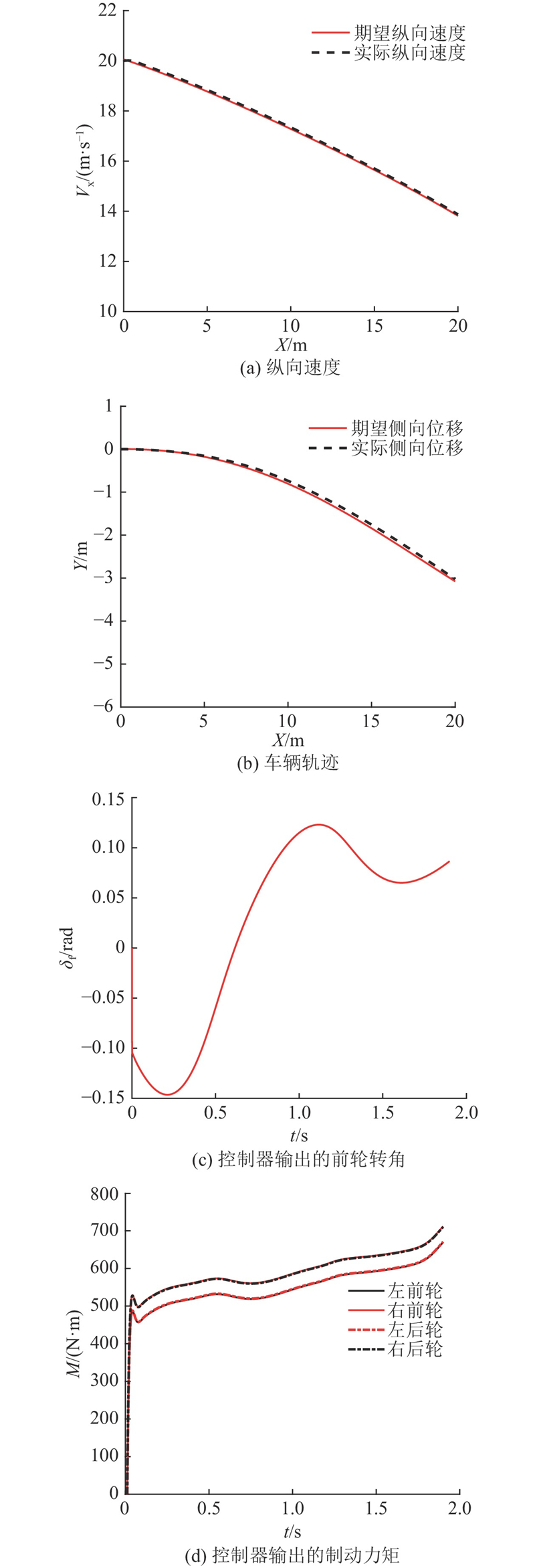
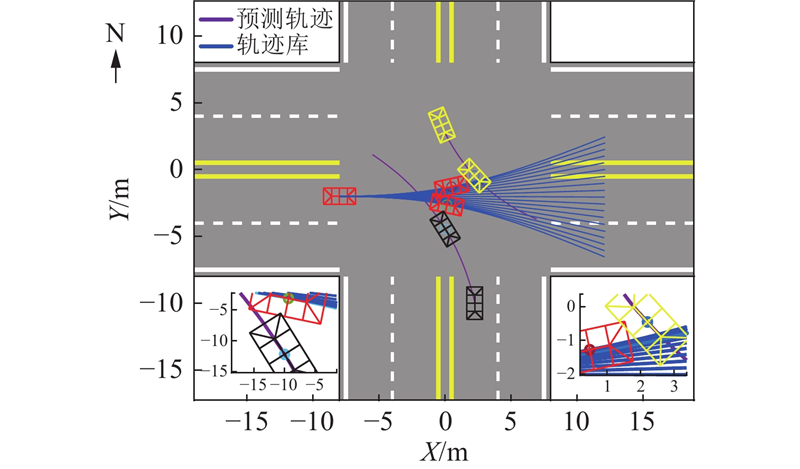
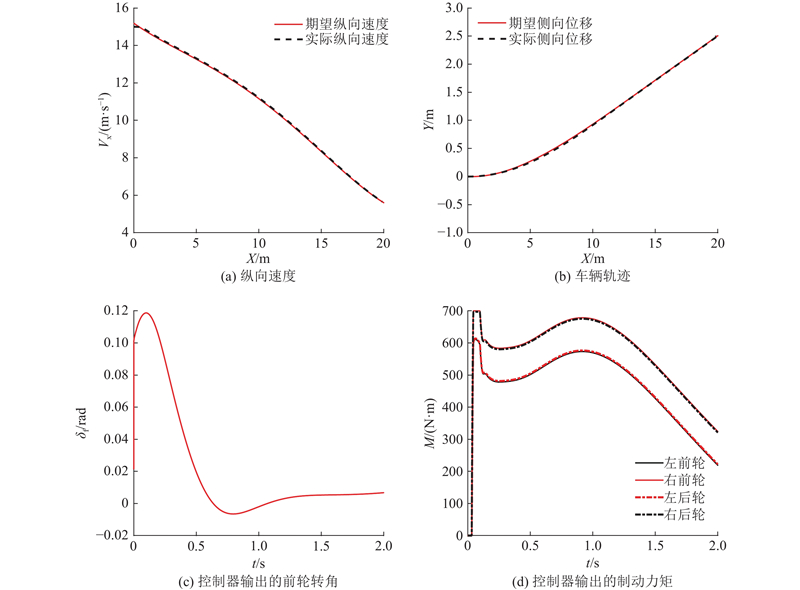
Abstract A collision severity minimization strategy based on hierarchical structure of decision layer and motion control layer was proposed aiming at how to effectively reduce vehicle collision severity and ensure high real-time response in unavoidable collision scenarios. The post-collision instability risk was estimated by using the four-degree-of-freedom collision model and the vehicle state before the collision by considering that the offline trajectory library was generated by solving the optimal control problem under the constraints of vehicle dynamics. The collision severity assessment model was used to evaluate the collision risk and post-collision instability risk of the trajectory library. The optimal trajectory was determined from the trajectory library in a very short time during decision making. A collaborative controller for trajectory tracking and yaw stability was established based on model predictive control in the motion control layer in order to maintain trajectory tracking accuracy and vehicle stability. The effectiveness of the proposed collision severity minimization strategy was verified by simulation in different scenarios. The simulation results show that the proposed collision severity minimization strategy can effectively reduce vehicle collision severity while ensuring vehicle stability under different working conditions.
|
|
Received: 29 December 2023
Published: 11 February 2025
|
|
|
| Fund: 福建省自然科学基金资助项目(2023J01245);湖南大学整车先进设计制造技术全国重点实验室开放基金资助项目(32065008). |
|
Corresponding Authors:
Bing ZHOU
E-mail: ysc980608@163.com;zhou_bingo@163.com
|
不可避撞场景下的车辆碰撞损伤最小化策略
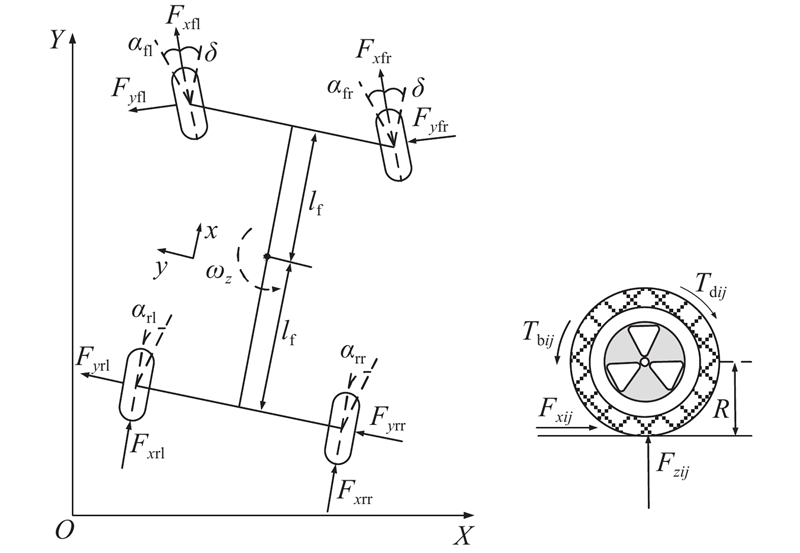
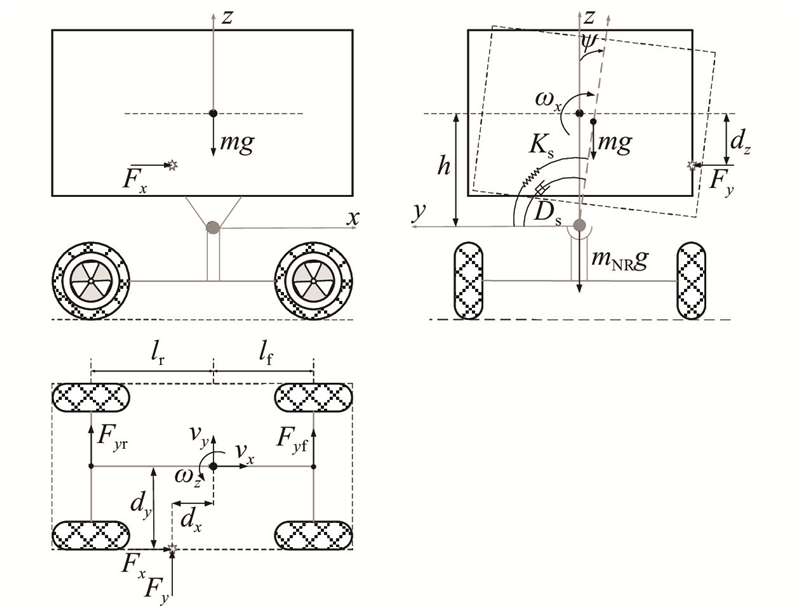
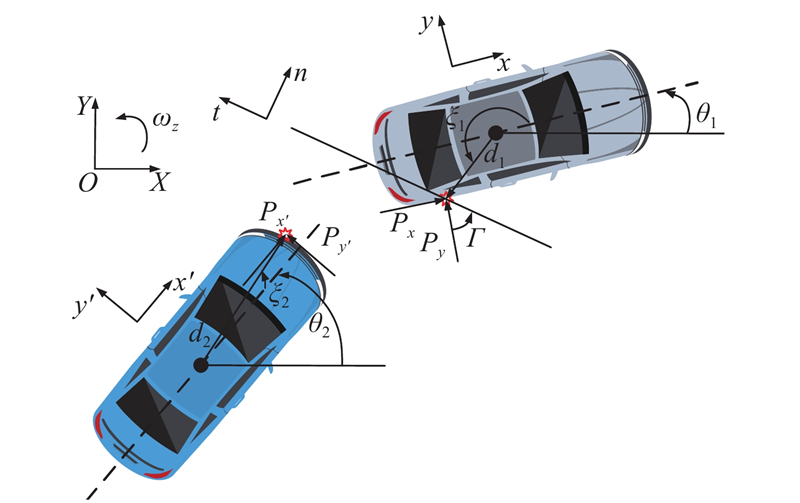
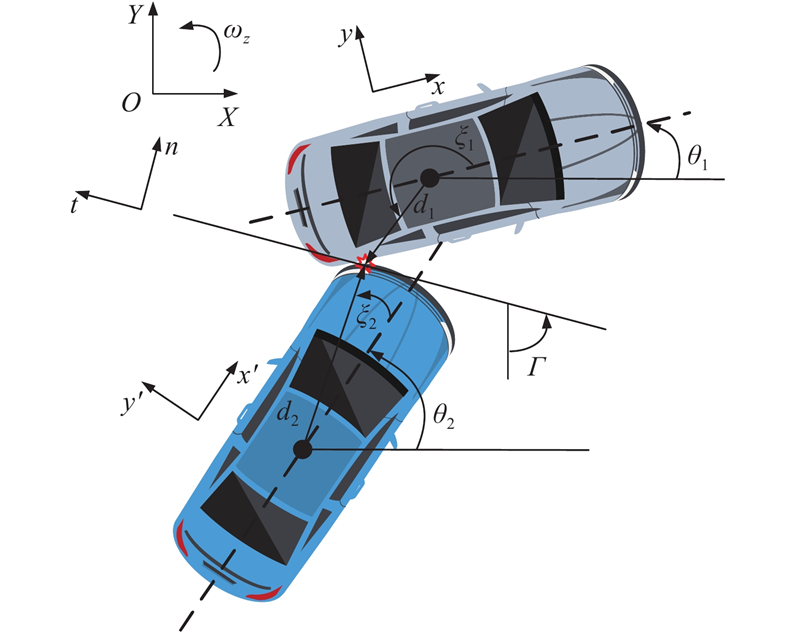
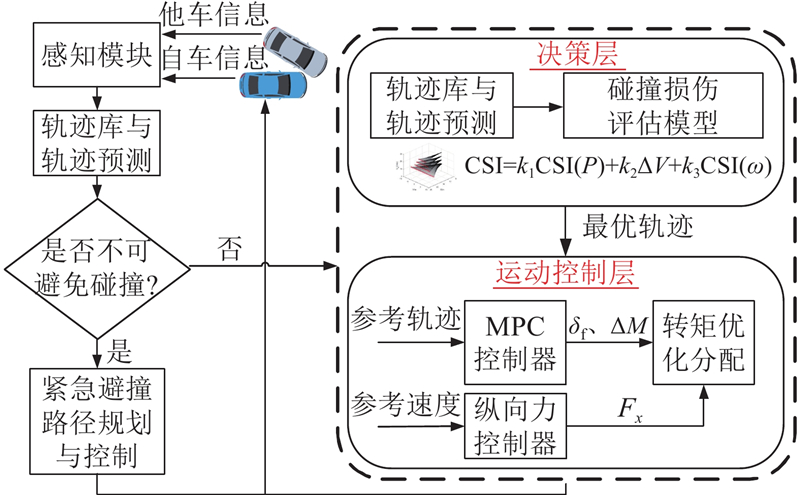
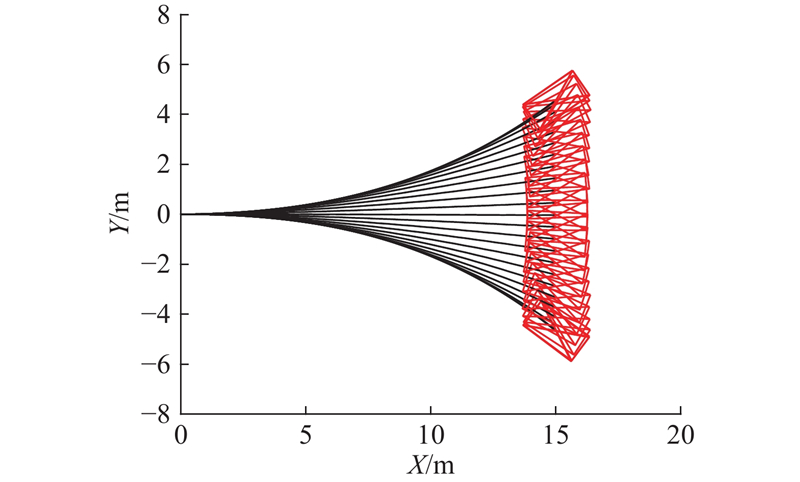
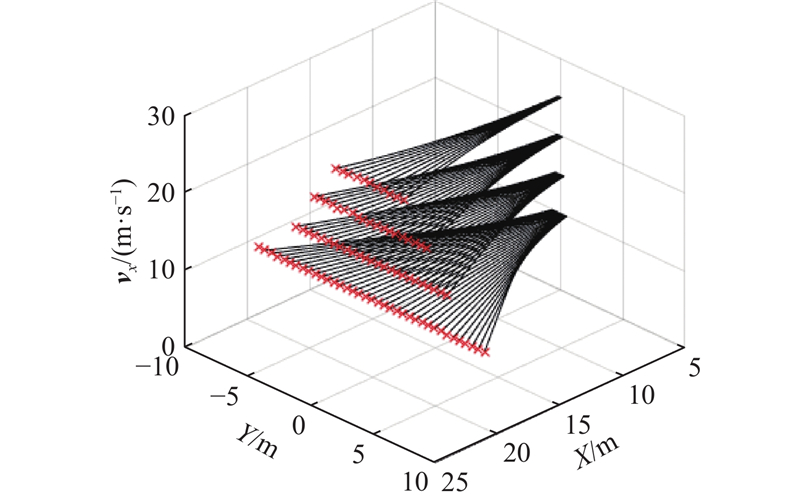
针对不可避撞场景下如何有效地减小车辆碰撞损伤并保证响应的高实时性,提出采用决策层和运动控制层分层结构的碰撞损伤最小化策略. 考虑在车辆动力学约束的情况下通过求解最优控制问题生成离线轨迹库,通过四自由度碰撞模型和碰撞前的车辆状态来估计碰后自车失稳风险,通过碰撞损伤评估模型在线评估轨迹库中轨迹的碰撞时风险和碰后自车失稳风险,在决策时以极短时间从轨迹库中确定出最优轨迹. 在运动控制层,为了保持轨迹跟踪精度和车辆稳定性,基于模型预测控制建立轨迹跟踪与横摆稳定性协同控制器. 在不同场景下进行仿真,验证所提出的碰撞损伤最小化策略的有效性. 仿真结果表明,所提出的碰撞损伤最小化策略能够在保证不同工况下车辆稳定性的同时,有效地减小车辆碰撞损伤.
关键词:
不可避撞,
碰撞损伤,
四自由度碰撞模型,
轨迹跟踪,
横摆稳定性
|
|
| [1] |
肖乐, 周华, 王朝健, 等 交叉口车车碰撞事故车损程度的影响要素[J]. 汽车安全与节能学报, 2023, 14 (1): 23- 30
XIAO Le, ZHOU Hua, WANG Chaojian, et al Influencing factors of vehicle damage degree in vehicle-vehicle collision accident at intersection[J]. Journal of Automotive Safety and Energy, 2023, 14 (1): 23- 30
doi: 10.3969/j.issn.1674-8484.2023.01.003
|
|
|
| [2] |
赵琳娜, 贾兴无, 戴帅, 等 中国城市道路交通安全特点解析[J]. 城市交通, 2018, 16 (3): 9- 20
ZHAO Linna, JIA Xingwu, DAI Shuai, et al Characteristics of urban road traffic safety in China[J]. Urban of Transport, 2018, 16 (3): 9- 20
|
|
|
| [3] |
宋健, 王伟玮, 李亮, 等 汽车安全技术的研究现状和展望[J]. 汽车安全与节能学报, 2010, 1 (2): 98- 106
SONG Jian, WANG Weiwei, LI Liang, et al Research status and prospects of automotive safety technology[J]. Journal of Automotive Safety and Energy, 2010, 1 (2): 98- 106
doi: 10.3969/j.issn.1676-8484.2010.02.002
|
|
|
| [4] |
CUI Q, DING R, WU X, et al A new strategy for rear-end collision avoidance via autonomous steering and differential braking in highway driving[J]. International Journal of Vehicle Mechanics and Mobility, 2020, 58 (6): 955- 986
|
|
|
| [5] |
ZHU S, WEI B, CHEN C, et al Emergency steering collision avoidance control based on distributed driving intelligent vehicles[J]. Concurrency and Computation-Practice and Experience, 2023, 35 (2): e7486
doi: 10.1002/cpe.7486
|
|
|
| [6] |
PAN Q, ZHOU B, WU X, et al A high-speed human-like collision avoidance controller based on a neural network under different road adhesion coefficients[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2023, 238 (7): 1- 15
|
|
|
| [7] |
VANGI D, VIRGA A, GULINO M Combined activation of braking and steering for automated driving systems: adaptive intervention by injury risk-based criteria[J]. Procedia Structural Integrity, 2019, 24: 423- 436
doi: 10.1016/j.prostr.2020.02.039
|
|
|
| [8] |
VANGI D A simplified model for analysis of the post-impact motion of vehicles[J]. Proceedings of the institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2013, 227 (6): 779- 788
doi: 10.1177/0954407012470353
|
|
|
| [9] |
VANGI D, BEGANI F, GULINO M, et al A vehicle model for crash stage simulation[J]. 9th Vienna International Conference on Mathematical Modelling, 2018, 51: 837- 842
|
|
|
| [10] |
PARSEH M, NYBACKA M, ASPLUND F Motion planning for autonomous vehicles with the inclusion of post-impact motions for minimising collision risk[J]. Vehicle System Dynamic, 2023, 61 (6): 1707- 1733
doi: 10.1080/00423114.2022.2088396
|
|
|
| [11] |
WANG H, HUANG Y, KHAJEPOUR A, et al. Local path planning for autonomous vehicles: crash mitigation [C]// IEEE Intelligent Vehicles Symposium . Changshu: IEEE, 2018: 1602-1607.
|
|
|
| [12] |
PARSEH M, ASPLUND F, MIKAEL N, et al. Pre-crash vehicle control and manoeuvre planning: a step towards minimizing collision severity for highly automated vehicles [C]// IEEE International Conference of Vehicular Electronics and Safety . Cairo: IEEE, 2019: 41-47.
|
|
|
| [13] |
LI D, ZHANG J, XIAO B, et al Vehicle crash mitigation strategy in unavoidable collision scenarios: focusing on motion planning by considering a generalized crash severity model[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2022, 44 (12): 15
|
|
|
| [14] |
ZHOU J, PENG H, LU J Collision model for vehicle motion prediction after light impacts[J]. Vehicle System Dynamic, 2008, 46: 3- 15
|
|
|
| [15] |
DE C, RUNARSSON A, GRANUM F, et al. Collision avoidance at intersections: a probabilistic threat-assessment and decision-making system for safety interventions [C]// IEEE 17th International Conference on Intelligent Transportation Systems . Qingdao: IEEE, 2014: 649-654.
|
|
|
| [16] |
PARSEH M, ASPLUND F, SVENSSON L, et al A data-driven method towards minimizing collision severity for highly automated vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2021, 6 (4): 723- 735
doi: 10.1109/TIV.2021.3061907
|
|
|
| [17] |
KONONEN D, FLANNAGAN C, WANG S Identification and validation of a logistic regression model for predicting serious injuries associated with motor vehicle crashes[J]. Accident Analysis and Prevention, 2011, 43 (1): 112- 122
doi: 10.1016/j.aap.2010.07.018
|
|
|
| [18] |
陈龙, 邹凯, 蔡英凤, 等 基于NMPC的智能汽车纵横向综合轨迹跟踪控制[J]. 汽车工程, 2021, 43 (2): 153- 161
CHEN Long, ZOU Kai, CAI Yingfeng, et al Longitudinal and lateral comprehensive trajectory tracking control of intelligent vehicles based on NMPC[J]. Automotive Engineering, 2021, 43 (2): 153- 161
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|