|
|
|
| Review on deep learning-based key algorithm for train running environment perception |
Zhichao CHEN1,2,3( ),Jie YANG1,2,3,4,*(),Fan LI1,2,Zhicheng FENG1,2 ),Jie YANG1,2,3,4,*(),Fan LI1,2,Zhicheng FENG1,2 |
1. School of Electrical Engineering and Automation, Jiangxi University of Science and Technology, Ganzhou 341000, China
2. Jiangxi Province Key Laboratory of Maglev Rail Transit Equipment, Jiangxi University of Science and Technology, Ganzhou 341000, China
3. School of Electrical Engineering, Shanghai Dianji University, Shanghai 201306, China
4. Guorui Scientific Innovation Rare Earth Functional Materials Company Limited, Ganzhou 341000, China |
|
|
|
Abstract The theoretical and related foundations of deep learning were elaborated in perceptual tasks, and the model architectures and performance of deep learning in vision and point cloud processing were combed. The key image recognition-based algorithms for track region extraction, contact network foreign object detection and low-light image enhancement were summarized, and the difficulties of existing algorithms were listed. For the demand for 3D perception of trains, the point cloud segmentation, monocular 3D detection and multimodal fusion detection algorithms for railroad scenes were clarified, and the model performance of datasets widely used in literature was analyzed. The problems and the trends for train running environment perception were outlined.
|
|
Received: 08 March 2024
Published: 18 January 2025
|
|
|
| Fund: 国家自然科学基金资助项目(62063009);国家重点研发计划资助项目(2023YFB4302100);江西省重大科技研发专项资助项目(20232ACE01011). |
|
Corresponding Authors:
Jie YANG
E-mail: chenzhichao_ai@163.com;yangjie@jxust.edu.cn
|
基于深度学习的列车运行环境感知关键算法研究综述
阐述深度学习在感知任务中的理论和相关基础,梳理深度学习在视觉、点云处理方面的模型架构及性能. 系统总结基于图像识别的轨道区域提取、接触网异物检测和低照度图像增强等关键算法,归纳现有算法的难点. 针对列车对3D感知的需求,进一步梳理面向铁路场景的点云分割、单目3D检测和多模态融合检测算法,对常见于文献的数据集进行模型性能的对比分析. 总结列车运行环境感知现阶段存在的问题和未来的发展趋势.
关键词:
列车运行环境感知,
深度学习,
图像处理,
三维感知,
多模态融合
|
|
| [1] |
王志忠 铁路施工安全管理的桎梏及应对[J]. 中国安全科学学报, 2021, 31 (Suppl.1): 56- 61
WANG Zhizhong Shackles of railway construction safety management and their countermeasures[J]. China Safety Science Journal, 2021, 31 (Suppl.1): 56- 61
|
|
|
| [2] |
YANG B, FANG L Automated extraction of 3-D railway tracks from mobile laser scanning point clouds[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2014, 7 (12): 4750- 4761
doi: 10.1109/JSTARS.2014.2312378
|
|
|
| [3] |
ZHU L, HYYPPA J The use of airborne and mobile laser scanning for modeling railway environments in 3D[J]. Remote Sensing, 2014, 6 (4): 3075- 3100
doi: 10.3390/rs6043075
|
|
|
| [4] |
LECUN Y, BENGIO Y, HINTON G Deep learning[J]. Nature, 2015, 521 (7553): 436- 444
doi: 10.1038/nature14539
|
|
|
| [5] |
王泉东, 杨岳, 罗意平, 等 铁路侵限异物检测方法综述[J]. 铁道科学与工程学报, 2019, 16 (12): 3152- 3159
WANG Quandong, YANG Yue, LUO Yiping, et al Review on railway intrusion detection methods[J]. Journal of Railway Science and Engineering, 2019, 16 (12): 3152- 3159
|
|
|
| [6] |
RISTIĆ-DURRANT D, FRANKE M, MICHELS K A review of vision-based on-board obstacle detection and distance estimation in railways[J]. Sensors, 2021, 21 (10): 3452
doi: 10.3390/s21103452
|
|
|
| [7] |
LONG J, SHELHAMER E, DARRELL T. Fully convolutional networks for semantic segmentation [C]// IEEE Conference on Computer Vision and Pattern Recognition . Boston: IEEE, 2015: 3431–3440.
|
|
|
| [8] |
RONNEBERGER O, FISCHER P, BROX T. U-Net: convolutional networks for biomedical image segmentation [C]// Medical Image Computing and Computer-Assisted Intervention . Munich: Springer, 2015: 234–241.
|
|
|
| [9] |
CHEN L C, ZHU Y, PAPANDREOU G, et al. Encoder-decoder with atrous separable convolution for semantic image segmentation [C]// European Conference on Computer Vision . Munich: Springer, 2018: 833–851.
|
|
|
| [10] |
YU C, GAO C, WANG J, et al BiSeNet V2: bilateral network with guided aggregation for real-time semantic segmentation[J]. International Journal of Computer Vision, 2021, 129: 3051- 3068
doi: 10.1007/s11263-021-01515-2
|
|
|
| [11] |
LIN T Y, GOYAL P, GIRSHICK R, et al. Focal Loss for dense object detection [C]// 2017 IEEE International Conference on Computer Vision . Venice: IEEE, 2017: 2999–3007.
|
|
|
| [12] |
BOCHKOVSKIY A, WANG C Y, LIAO H Y M. YOLOv4: optimal speed and accuracy of object detection [EB/OL]. (2020–04–23)[2024−03−05]. https://arxiv.org/pdf/2004.10934.
|
|
|
| [13] |
LIU S, QI L, QIN H, et al. Path aggregation network for instance segmentation [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Salt Lake City: IEEE, 2018: 8759–8768.
|
|
|
| [14] |
TAN M, PANG R, LE Q V. EfficientDet: scalable and efficient object detection [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Seattle: IEEE, 2020: 10781–10790.
|
|
|
| [15] |
LORE K G, AKINTAYO A, SARKAR S LLNet: a deep autoencoder approach to natural low-light image enhancement[J]. Pattern Recognition, 2017, 61: 650- 662
doi: 10.1016/j.patcog.2016.06.008
|
|
|
| [16] |
LV F, LU F, WU J, et al. MBLLEN: low-light image/video enhancement using CNNs [C]// British Machine Vision Conference . Newcastle: [s.n.], 2018: 1–13.
|
|
|
| [17] |
WEI C, WANG W, YANG W, et al. Deep Retinex decomposition for low-light enhancement [EB/OL]. (2018−08−14)[2024−03−05]. https://arxiv.org/pdf/1808.04560.
|
|
|
| [18] |
ZHANG Y, ZHANG J, GUO X. Kindling the darkness: a practical low-light image enhancer [C]// Proceedings of the 27th ACM International Conference on Multimedia . [S.l.]: ACM, 2019: 1632–1640.
|
|
|
| [19] |
JIANG Y, GONG X, LIU D, et al EnlightenGAN: deep light enhancement without paired supervision[J]. IEEE Transactions on Image Processing, 2021, 30: 2340- 2349
doi: 10.1109/TIP.2021.3051462
|
|
|
| [20] |
ZHANG L, ZHANG L, LIU X, et al. Zero-shot restoration of back-lit images using deep internal learning [C]// Proceedings of the 27th ACM International Conference on Multimedia . [S.l.]: ACM, 2019: 1623–1631.
|
|
|
| [21] |
ZHU A, ZHANG L, SHEN Y, et al. Zero-shot restoration of underexposed images via robust Retinex decomposition [C]// 2020 IEEE International Conference on Multimedia and Expo . London: IEEE, 2020: 1–6.
|
|
|
| [22] |
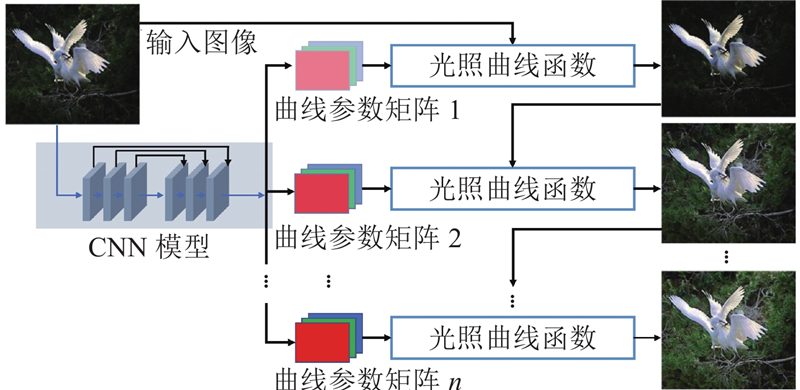
GUO C, LI C, GUO J, et al. Zero-reference deep curve estimation for low-light image enhancement [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Seattle: IEEE, 2020: 1780–1789.
|
|
|
| [23] |
QI C R, SU H, MO K, et al. PointNet: deep learning on point sets for 3D classification and segmentation [C]// IEEE Conference on Computer Vision and Pattern Recognition . Honolulu: IEEE, 2017: 652–660.
|
|
|
| [24] |
WU B, WAN A, YUE X, et al. SqueezeSeg: convolutional neural nets with recurrent CRF for real-time road-object segmentation from 3D LiDAR point cloud [C]// IEEE International Conference on Robotics and Automation . Brisbane: IEEE, 2018: 1887–1893.
|
|
|
| [25] |
ZHANG Y, ZHOU Z, DAVID P, et al. PolarNet: an improved grid representation for online LiDAR point clouds semantic segmentation [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Seattle: IEEE, 2020: 9601–9610.
|
|
|
| [26] |
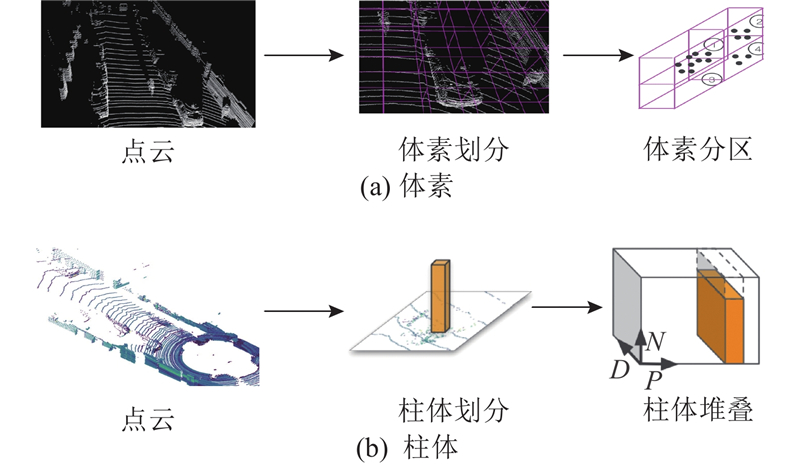
ZHOU Y, TUZEL O. VoxelNet: end-to-end learning for point cloud based 3D object detection [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Salt Lake City: IEEE, 2018: 4490–4499.
|
|
|
| [27] |
YAN Y, MAO Y, LI B SECOND: sparsely embedded convolutional detection[J]. Sensors, 2018, 18 (10): 3337
doi: 10.3390/s18103337
|
|
|
| [28] |
LANG A H, VORA S, CAESAR H, et al. PointPillars: fast encoders for object detection from point clouds [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Long Beach: IEEE, 2019: 12697–12705.
|
|
|
| [29] |
SHI S, WANG X, LI H. PointRCNN: 3D object proposal generation and detection from point cloud [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Long Beach: IEEE, 2019: 770–779.
|
|
|
| [30] |
SHI S, WANG Z, WANG X, et al. Part-A2 net: 3D part-aware and aggregation neural network for object detection from point cloud [EB/OL]. (2020−03−16)[2024−03−05]. https://arxiv.org/pdf/1907.03670v1.
|
|
|
| [31] |
ZHANG Y, ZHANG Q, ZHU Z, et al GLENet: boosting 3D object detectors with generative label uncertainty estimation[J]. International Journal of Computer Vision, 2023, 131: 3332- 3352
doi: 10.1007/s11263-023-01869-9
|
|
|
| [32] |
SHI S, GUO C, JIANG L, et al. PV-RCNN: point-voxel feature set abstraction for 3D object detection [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Seattle: IEEE, 2020: 10529–10538.
|
|
|
| [33] |
PAN X, XIA Z, SONG S, et al. 3D object detection with pointformer [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Nashville: IEEE, 2021: 7463–7472.
|
|
|
| [34] |
SHENG H, CAI S, LIU Y, et al. Improving 3D object detection with channel-wise Transformer [C]// IEEE/CVF International Conference on Computer Vision . Montreal: IEEE, 2021: 2743–2752.
|
|
|
| [35] |
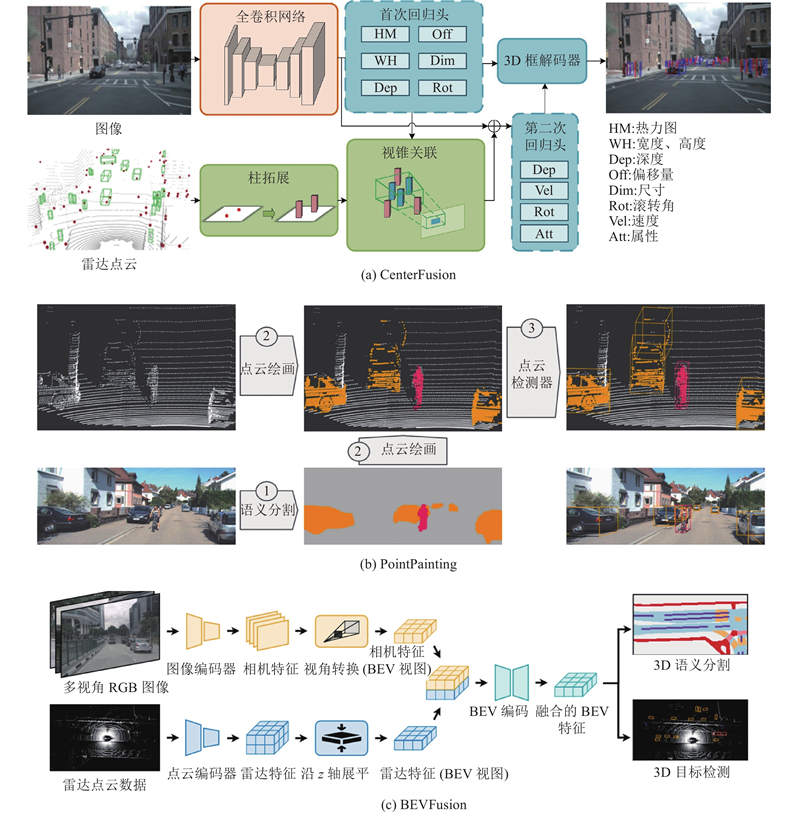
NABATI R, QI H. CenterFusion: center-based radar and camera fusion for 3D object detection [C]// IEEE Winter Conference on Applications of Computer Vision . Waikoloa: IEEE, 2021: 1527–1536.
|
|
|
| [36] |
VORA S, LANG A H, HELOU B, et al. PointPainting: sequential fusion for 3D object detection [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Seattle: IEEE, 2020: 4604–4612.
|
|
|
| [37] |
LIU Z, TANG H, AMINI A, et al. BEVFusion: multi-task multi-sensor fusion with unified bird’s-eye view representation [C]// IEEE International Conference on Robotics and Automation . London: IEEE, 2023: 2774–2781.
|
|
|
| [38] |
CAESAR H, BANKITI V, LANG A H, et al. NuScenes: a multimodal dataset for autonomous driving [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . Seattle: IEEE, 2020: 11621–11631.
|
|
|
| [39] |
刘朝辉, 杨杰, 陈智超 基于深度学习的轨道表面异物识别方法[J]. 中国铁道科学, 2023, 44 (3): 23- 33
LIU Zhaohui, YANG Jie, CHEN Zhichao Foreign object recognition method for track surface based on deep learning[J]. China Railway Science, 2023, 44 (3): 23- 33
doi: 10.3969/j.issn.1001-4632.2023.03.03
|
|
|
| [40] |
何文玉, 杨杰, 张天露 基于深度学习的轨道异物入侵检测算法[J]. 计算机工程与设计, 2020, 41 (12): 3376- 3383
HE Wenyu, YANG Jie, ZHANG Tianlu Orbital foreign object intrusion detection algorithm based on deep learning[J]. Computer Engineering and Design, 2020, 41 (12): 3376- 3383
|
|
|
| [41] |
HE D, ZOU Z, CHEN Y, et al Obstacle detection of rail transit based on deep learning[J]. Measurement, 2021, 176: 109241
doi: 10.1016/j.measurement.2021.109241
|
|
|
| [42] |
BAI X, HU Z, ZHU X, et al. TransFusion: robust LiDAR-camera fusion for 3D object detection with transformers [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition . New Orleans: IEEE, 2022: 1090–1099.
|
|
|
| [43] |
CHEN X, ZHANG T, WANG Y, et al. FUTR3D: a unified sensor fusion framework for 3D detection [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops . Vancouver: IEEE, 2023: 172–181.
|
|
|
| [44] |
TONG L, WANG Z, JIA L, et al Fully decoupled residual ConvNet for real-time railway scene parsing of UAV aerial images[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (9): 14806- 14819
doi: 10.1109/TITS.2021.3134318
|
|
|
| [45] |
KIM B, KIM I, KIM N, et al SeMA-UNet: a semi-supervised learning with multimodal approach of UNet for effective segmentation of key components in railway images[J]. Journal of Electrical Engineering and Technology, 2024, 19: 3317- 3330
doi: 10.1007/s42835-024-01867-y
|
|
|
| [46] |
WU Y, MENG F, QIN Y, et al UAV imagery based potential safety hazard evaluation for high-speed railroad using real-time instance segmentation[J]. Advanced Engineering Informatics, 2023, 55: 101819
doi: 10.1016/j.aei.2022.101819
|
|
|
| [47] |
WU Y, CHEN P, QIN Y, et al Automatic railroad track components inspection using hybrid deep learning framework[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 5011415
|
|
|
| [48] |
CHEN Z, YANG J, ZHOU F RailSegVITNet: a lightweight VIT-based real-time track surface segmentation network for improving railroad safety[J]. Journal of King Saud University-Computer and Information Sciences, 2024, 36 (1): 101929
doi: 10.1016/j.jksuci.2024.101929
|
|
|
| [49] |
CHEN Z, YANG J, CHEN L, et al Efficient railway track region segmentation algorithm based on lightweight neural network and cross-fusion decoder[J]. Automation in Construction, 2023, 155: 105069
doi: 10.1016/j.autcon.2023.105069
|
|
|
| [50] |
BRUCKER M, CRAMARIUC A, VON EINEM C, et al. Local and global information in obstacle detection on railway tracks [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems . Detroit: IEEE, 2023: 9049–9056.
|
|
|
| [51] |
FENG Z, YANG J, CHEN Z, et al LRseg: an efficient railway region extraction method based on lightweight encoder and self-correcting decoder[J]. Expert Systems with Applications, 2024, 238: 122386
doi: 10.1016/j.eswa.2023.122386
|
|
|
| [52] |
于新善, 孟祥印, 金腾飞, 等 基于改进Canny算法的物体边缘检测算法[J]. 激光与光电子学进展, 2023, 60 (22): 2212002
YU Xinshan, MENG Xiangyin, JIN Tengfei, et al Object edge detection algorithm based on improved Canny algorithm[J]. Laser and Optoelectronics Progress, 2023, 60 (22): 2212002
doi: 10.3788/LOP223400
|
|
|
| [53] |
LIU W, WANG L Quantum image edge detection based on eight-direction Sobel operator for NEQR[J]. Quantum Information Processing, 2022, 21: 190
doi: 10.1007/s11128-022-03527-4
|
|
|
| [54] |
耿庆华, 刘伟铭, 刘瑞康 基于空间尺度标准化的动车组底部异常检测[J]. 铁道学报, 2022, 44 (5): 67- 75
GENG Qinghua, LIU Weiming, LIU Ruikang Anomaly detection of bottom of EMU based on space-scale standardization[J]. Journal of the China Railway Society, 2022, 44 (5): 67- 75
doi: 10.3969/j.issn.1001-8360.2022.05.009
|
|
|
| [55] |
王世勇, 乾国康, 李迪, 等 面向边缘特征的实时模板匹配方法[J]. 华南理工大学学报: 自然科学版, 2023, 51 (9): 1- 10
WANG Shiyong, QIAN Guokang, LI Di, et al Real-time template matching method for edge features[J]. Journal of South China University of Technology: Natural Science Edition, 2023, 51 (9): 1- 10
|
|
|
| [56] |
CHEN C, YANG B, SONG S, et al Automatic clearance anomaly detection for transmission line corridors utilizing UAV-borne LiDAR data[J]. Remote Sensing, 2018, 10 (4): 613
doi: 10.3390/rs10040613
|
|
|
| [57] |
LI H, DONG Y, LIU Y, et al Design and implementation of UAVs for bird’s nest inspection on transmission lines based on deep learning[J]. Drones, 2022, 6 (9): 252
doi: 10.3390/drones6090252
|
|
|
| [58] |
TANG C, DONG H, HUANG Y, et al Foreign object detection for transmission lines based on Swin Transformer V2 and YOLOX[J]. The Visual Computer, 2024, 40: 3003- 3021
doi: 10.1007/s00371-023-03004-8
|
|
|
| [59] |
YU Y, QIU Z, LIAO H, et al A method based on multi-network feature fusion and random forest for foreign objects detection on transmission lines[J]. Applied Sciences, 2022, 12 (10): 4982
doi: 10.3390/app12104982
|
|
|
| [60] |
CHEN Z, YANG J, FENG Z, et al RailFOD23: a dataset for foreign object detection on railroad transmission lines[J]. Scientific Data, 2024, 11: 72
doi: 10.1038/s41597-024-02918-9
|
|
|
| [61] |
QIU Z, ZHU X, LIAO C, et al A lightweight YOLOv4-EDAM model for accurate and real-time detection of foreign objects suspended on power lines[J]. IEEE Transactions on Power Delivery, 2022, 38 (2): 1329- 1340
|
|
|
| [62] |
LI S, LIU Y, LI M, et al DF-YOLO: highly accurate transmission line foreign object detection algorithm[J]. IEEE Access, 2023, 11: 108398- 108406
doi: 10.1109/ACCESS.2023.3321385
|
|
|
| [63] |
ZHANG W, LIU X, YUAN J, et al RCNN-based foreign object detection for securing power transmission lines (RCNN4SPTL)[J]. Procedia Computer Science, 2019, 147: 331- 337
doi: 10.1016/j.procs.2019.01.232
|
|
|
| [64] |
LI G, YANG Y, QU X, et al A deep learning based image enhancement approach for autonomous driving at night[J]. Knowledge-Based Systems, 2021, 213: 106617
doi: 10.1016/j.knosys.2020.106617
|
|
|
| [65] |
刘文强. 基于深度学习的接触网支持装置状态检测方法研究[D]. 成都: 西南交通大学, 2021.
LIU Wenqiang. Study on deep learning-based state detection method study for catenary support devices [D]. Chengdu: Southwest Jiaotong University, 2021.
|
|
|
| [66] |
CHEN Z, YANG J, YANG C BrightsightNet: a lightweight progressive low-light image enhancement network and its application in “Rainbow” maglev train[J]. Journal of King Saud University-Computer and Information Sciences, 2023, 35 (10): 101814
doi: 10.1016/j.jksuci.2023.101814
|
|
|
| [67] |
LIN S, XU C, CHEN L, et al LiDAR point cloud recognition of overhead catenary system with deep learning[J]. Sensors, 2020, 20 (8): 2212
doi: 10.3390/s20082212
|
|
|
| [68] |
YU X, HE W, QIAN X, et al Real-time rail recognition based on 3D point clouds[J]. Measurement Science and Technology, 2022, 33 (10): 105207
doi: 10.1088/1361-6501/ac750c
|
|
|
| [69] |
DIBARI P, NITTI M, MAGLIETTA R, et al. Semantic segmentation of multimodal point clouds from the railway context [C]// Multimodal Sensing and Artificial Intelligence: Technologies and Applications II . Washington: SPIE, 2021, 11785: 158–166.
|
|
|
| [70] |
GRANDIO J, RIVEIRO B, SOILÁN M, et al Point cloud semantic segmentation of complex railway environments using deep learning[J]. Automation in Construction, 2022, 141: 104425
doi: 10.1016/j.autcon.2022.104425
|
|
|
| [71] |
SOILÁN M, NÓVOA A, SÁNCHEZ-RODRÍGUEZ A, et al Semantic segmentation of point clouds with PointNet and KPConv architectures applied to railway tunnels[J]. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2020, 2: 281- 288
|
|
|
| [72] |
WANG Z, YU G, CHEN P, et al FarNet: an attention-aggregation network for long-range rail track point cloud segmentation[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (8): 13118- 13126
doi: 10.1109/TITS.2021.3119900
|
|
|
| [73] |
LIU P, YU G, WANG Z, et al Uncertainty-aware point-cloud semantic segmentation for unstructured roads[J]. IEEE Sensors Journal, 2023, 23 (13): 15071- 15080
doi: 10.1109/JSEN.2023.3266802
|
|
|
| [74] |
MAURI A, KHEMMAR R, DECOUX B, et al Real-time 3D multi-object detection and localization based on deep learning for road and railway smart mobility[J]. Journal of Imaging, 2021, 7 (8): 145
doi: 10.3390/jimaging7080145
|
|
|
| [75] |
MAURI A, KHEMMAR R, DECOUX B, et al Lightweight convolutional neural network for real-time 3D object detection in road and railway environments[J]. Journal of Real-Time Image Processing, 2022, 19: 499- 516
doi: 10.1007/s11554-022-01202-6
|
|
|
| [76] |
TAGIEW R, KLASEK P, TILLY R, et al. OSDaR23: open sensor data for rail 2023 [C]// International Conference on Robotics and Automation Engineering . Singapore: IEEE, 2023: 270–276.
|
|
|
| [77] |
KOPUZ E. Multi-modal 3D object detection in long range and low-resolution conditions of sensors [D]. Munich: Technical University of Munich, 2023.
|
|
|
| [78] |
WU Y, QIN Y, QIAN Y, et al Automatic detection of arbitrarily oriented fastener defect in high-speed railway[J]. Automation in Construction, 2021, 131: 103913
doi: 10.1016/j.autcon.2021.103913
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|