|
|
|
| Point cloud 3D object detection algorithm based on local information fusion |
Linjie ZHANG1( ),Zhilei CHAI1,2,*(),Ning WANG1 ),Zhilei CHAI1,2,*(),Ning WANG1 |
1. School of Artificial Intelligence and Computer Science, Jiangnan University, Wuxi 214122, China
2. Jiangsu Provincial Engineering Laboratory of Pattern Recognition and Computational Intelligence, Wuxi 214122, China |
|
|
|
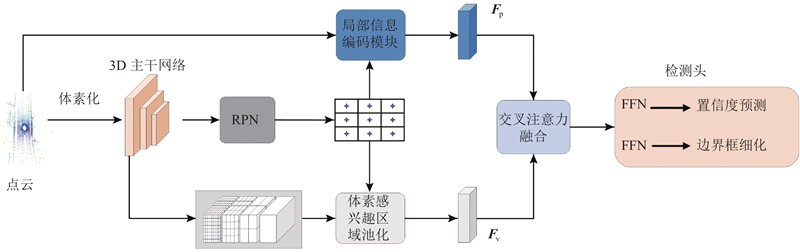
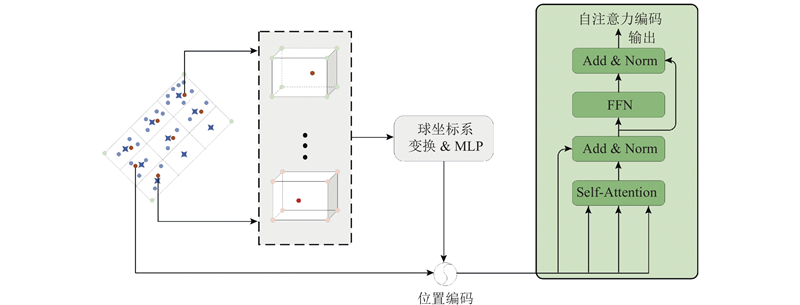
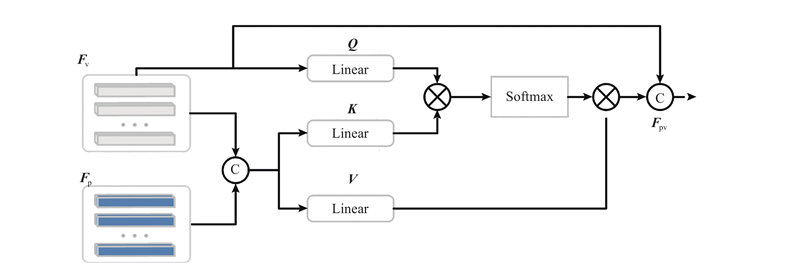
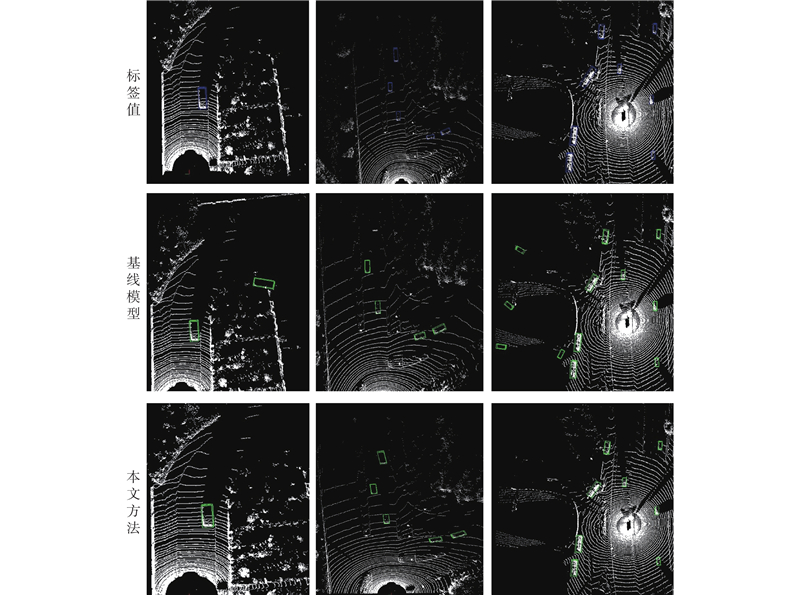
Abstract A three-dimensional object detection algorithm with a local information encoding module and a subsequent cross-fusion module was proposed aiming at the current lack of accurate spatial position information for three-dimensional object detection algorithms based on point clouds. Global features were efficiently encoded using 3D sparse convolution during the feature extraction phase. The local information encoding module leveraged the intrinsic information within the object’s point cloud, constructing fine-grained semantic details. The information was reweighted to enhance the representation of local features through a self-attention mechanism. A cross-fusion module was introduced to facilitate interaction between local and global features, resulting in enhanced object detection features. The proposed method was validated using the KITTI and Waymo datasets. The average precision at IoU 0.7 for easy, moderate and hard tasks achieved 91.60%, 82.53%, and 77.83%, respectively on the KITTI dataset. The average precision at IoU 0.7 reached 74.92% on the Waymo dataset.
|
|
Received: 03 July 2023
Published: 23 October 2024
|
|
|
| Fund: 国家自然科学基金资助项目(61972180);江苏省模式识别与计算智能工程实验室资助项目. |
|
Corresponding Authors:
Zhilei CHAI
E-mail: sanmu_mu@163.com;zlchai@jiangnan.edu.cn
|
基于局部信息融合的点云3D目标检测算法
针对当前基于点云的三维目标检测算法缺乏目标准确的空间位置信息,提出局部信息编码模块和后期交叉融合模块的三维目标检测算法. 在特征提取阶段,模型通过三维稀疏卷积高效地编码全局特征. 局部信息编码模块利用目标内部的原始点云信息,构建目标的细粒度语义信息,通过自注意力机制对这些信息进行重新加权,增强局部特征的表达能力. 提出交叉融合模块,用于局部特征与全局特征的信息交互,产生表达能力更强的目标检测特征. 使用KITTI和Waymo公开数据集,验证所提出的方法. 在KITTI数据集的简单、中等和困难任务上,本文方法的平均准确率AP0.7分别达到了91.60%、82.53%和77.83%,在Waymo数据集上的平均准确率AP0.7达到74.92%.
关键词:
点云,
稀疏卷积,
局部信息,
注意力机制,
交叉融合
|
|
| [1] |
MAO J, SHI S, WANG X, et al 3D object detection for autonomous driving: a comprehensive survey[J]. International Journal of Computer Vision, 2023, 131: 1909- 1963
doi: 10.1007/s11263-023-01790-1
|
|
|
| [2] |
MUHAMMAD K, HUSSAIN T, ULLAH H, et al Vision-based semantic segmentation in scene understanding for autonomous driving: recent achievements, challenges, and outlooks[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (12): 22694- 22715
doi: 10.1109/TITS.2022.3207665
|
|
|
| [3] |
BEHLEY J, GARBADE M, MILIOTO A, et al. Semantickitti: a dataset for semantic scene understanding of lidar sequences [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . Seoul: IEEE, 2019: 9297-9307.
|
|
|
| [4] |
LIU Z, WU S, JIN S, et al Investigating pose representations and motion contexts modeling for 3D motion prediction[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 45 (1): 681- 697
|
|
|
| [5] |
AKSAN E, KAUFMANN M, CAO P, et al. A spatio-temporal transformer for 3d human motion prediction [C]// International Conference on 3D Vision . [S. l. ]: IEEE, 2021: 567-574.
|
|
|
| [6] |
CUI A, CASAS S, SADAT A, et al. Lookout: diverse multi-future prediction and planning for self-driving [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . Montreal: IEEE, 2021: 16107-16116.
|
|
|
| [7] |
DERUYTTERE T, VANDENHENDE S, GRUJICIC D, et al. Talk2car: taking control of your self-driving car [C]//. Processing and the 9th International Joint Conference on Natural Language Processing , Hong Kong: ACL, 2019: 2088-2098.
|
|
|
| [8] |
SHENG H, CAI S, LIU Y, et al. Improving 3d object detection with channel-wise transformer [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . Montreal: IEEE, 2021: 2743-2752.
|
|
|
| [9] |
DENG J, SHI S, LI P, et al. Voxel R-CNN: towards high performance voxel-based 3d object detection [C]// Proceedings of the AAAI Conference on Artificial Intelligence . Vancouver: AAAI, 2021: 1201-1209.
|
|
|
| [10] |
GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? the kitti vision benchmark suite [C]// IEEE Conference on Computer Vision and Pattern Recognition . Providence: IEEE, 2012: 3354-3361.
|
|
|
| [11] |
SUN P, KRETZSCHMAR H, DOTIWALLA X, et al. Scalability in perception for autonomous driving: Waymo open dataset [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Seattle: IEEE, 2020: 2446-2454.
|
|
|
| [12] |
HUO Weile, JING Tao, REN Shuang Review of 3D object detection for autonomous driving[J]. Computer Science, 2023, 50 (7): 107- 118
|
|
|
| [13] |
QI C R, SU H, MO K, et al. Pointnet: deep learning on point sets for 3D classification and segmentation [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Honolulu: IEEE, 2017: 652-660.
|
|
|
| [14] |
SHI S, WANG X, LI H. Pointrcnn: 3d object proposal generation and detection from point cloud [C]// Proceedings of the IEEE/CVF conference on Computer Vision and Pattern Recognition . Long Beach: IEEE, 2019: 770-779.
|
|
|
| [15] |
QI C R, LITANY O, HE K, et al. Deep hough voting for 3d object detection in point clouds [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . Seoul: IEEE, 2019: 9277-9286.
|
|
|
| [16] |
SHI W, RAJKUMAR R. Point-gnn: graph neural network for 3d object detection in a point cloud [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Seattle: IEEE, 2020: 1711-1719.
|
|
|
| [17] |
YANG Z, SUN Y, LIU S, et al. Std: sparse-to-dense 3d object detector for point cloud [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . Seoul: IEEE, 2019: 1951-1960.
|
|
|
| [18] |
YANG Z, SUN Y, LIU S, et al. 3dssd: point-based 3d single stage object detector [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Seattle: IEEE, 2020: 11040-11048.
|
|
|
| [19] |
ZHOU Y, TUZEL O. Voxelnet: end-to-end learning for point cloud based 3d object detection [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Salt Lake City: IEEE, 2018: 4490-4499.
|
|
|
| [20] |
YAN Y, MAO Y, LI B Second: sparsely embedded convolutional detection[J]. Sensors, 2018, 18 (10): 3337- 3353
doi: 10.3390/s18103337
|
|
|
| [21] |
MAO J, XUE Y, NIU M, et al. Voxel transformer for 3d object detection [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . Montreal: IEEE, 2021: 3164-3173.
|
|
|
| [22] |
XU Q, ZHOU Y, WANG W, et al. Spg: unsupervised domain adaptation for 3d object detection via semantic point generation [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . Montreal: IEEE, 2021: 15446-15456.
|
|
|
| [23] |
KOO I, LEE I, KIM S H, et al. PG-RCNN: semantic surface point generation for 3D object detection [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . Vancouver: IEEE, 2023: 18142-18151.
|
|
|
| [24] |
YANG H, WANG W, CHEN M, et al. PVT-SSD: single-stage 3D object detector with point-voxel Transformer [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver: IEEE, 2023: 13476-13487.
|
|
|
| [25] |
MAHMOUD A, HU J S, WASLANDER S L. Dense voxel fusion for 3D object detection [C]// Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision . Waikoloa: IEEE, 2023: 663-672.
|
|
|
| [26] |
VASWANI A, SHAZEER N, PARMAR N, et al Attention is all you need[J]. Advances in Neural Information Processing Systems, 2017, 30 (2): 6000- 6010
|
|
|
| [27] |
HE C, LI R, LI S, et al. Voxel set transformer: a set-to-set approach to 3d object detection from point clouds [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . New Orleans: IEEE, 2022: 8417-8427.
|
|
|
| [28] |
MAO J, NIU M, BAI H, et al. Pyramid R-CNN: towards better performance and adaptability for 3d object detection [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . [S. l. ]: IEEE, 2021: 2723-2732.
|
|
|
| [29] |
PAN X, XIA Z, SONG S, et al. 3d object detection with pointformer [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . [S. l. ]: IEEE, 2021: 7463-7472.
|
|
|
| [30] |
SHI S, GUO C, JIANG L, et al. Pv-rcnn: point-voxel feature set abstraction for 3d object detection [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . [S. l. ]: IEEE, 2020: 10529-10538.
|
|
|
| [31] |
HU J S, KUAI T, WASLANDER S L. Point density-aware voxels for lidar 3d object detection [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . New Orleans: IEEE, 2022: 8469-8478.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|