|
|
|
| Real-time positioning and control of soft robot based on three-dimensional vision |
Hong ZHANG1,2( ),Xuecheng ZHANG1,Guoqiang WANG1,Panlong GU2,Nan JIANG1 ),Xuecheng ZHANG1,Guoqiang WANG1,Panlong GU2,Nan JIANG1 |
1. Center for Soft Machines and Smart Devices, Huanjiang Laboratory, Zhuji 311800, China
2. School of Aeronautics and Astronautics, Zhejiang University, Hangzhou 310058, China |
|
|
|
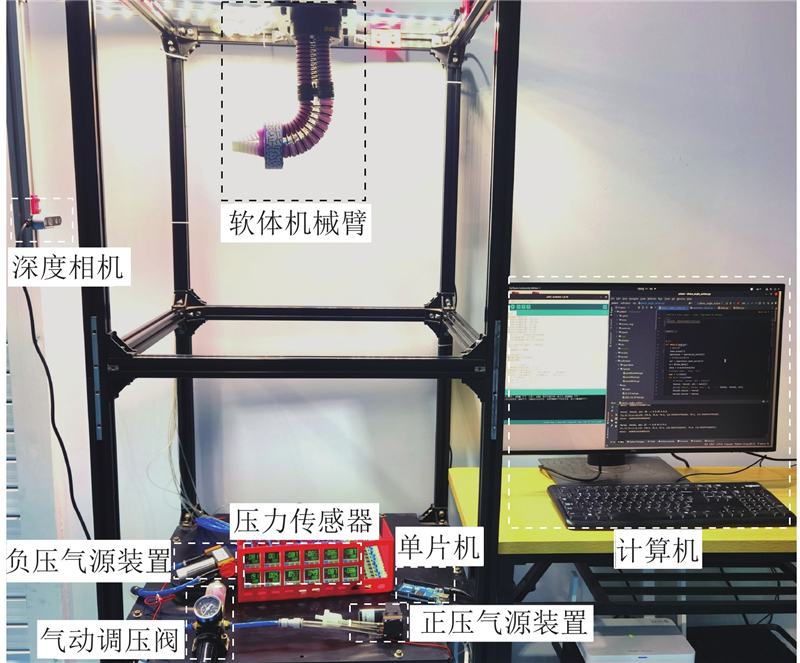
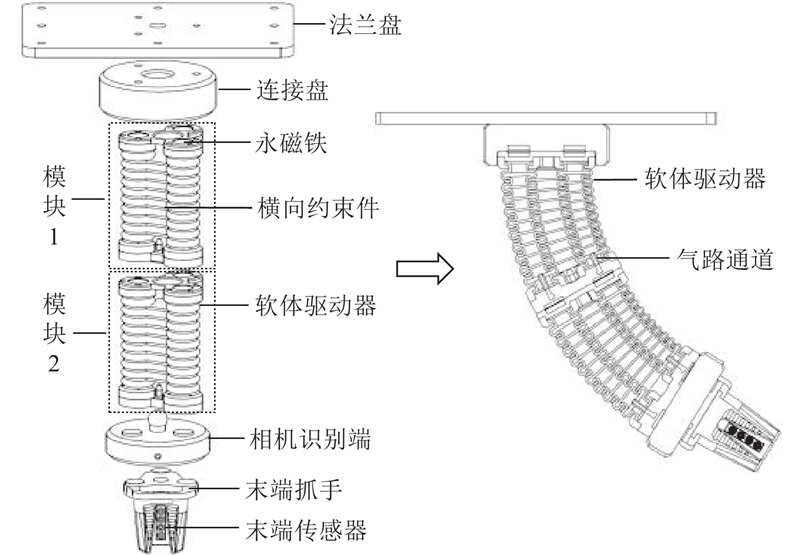
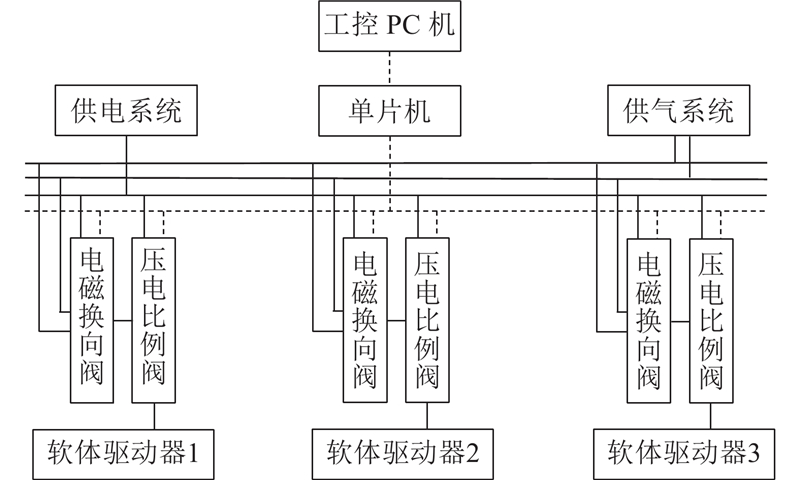
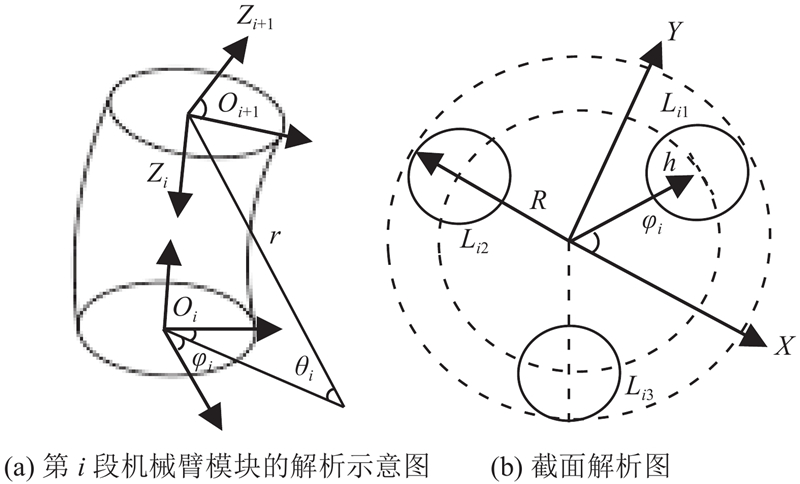
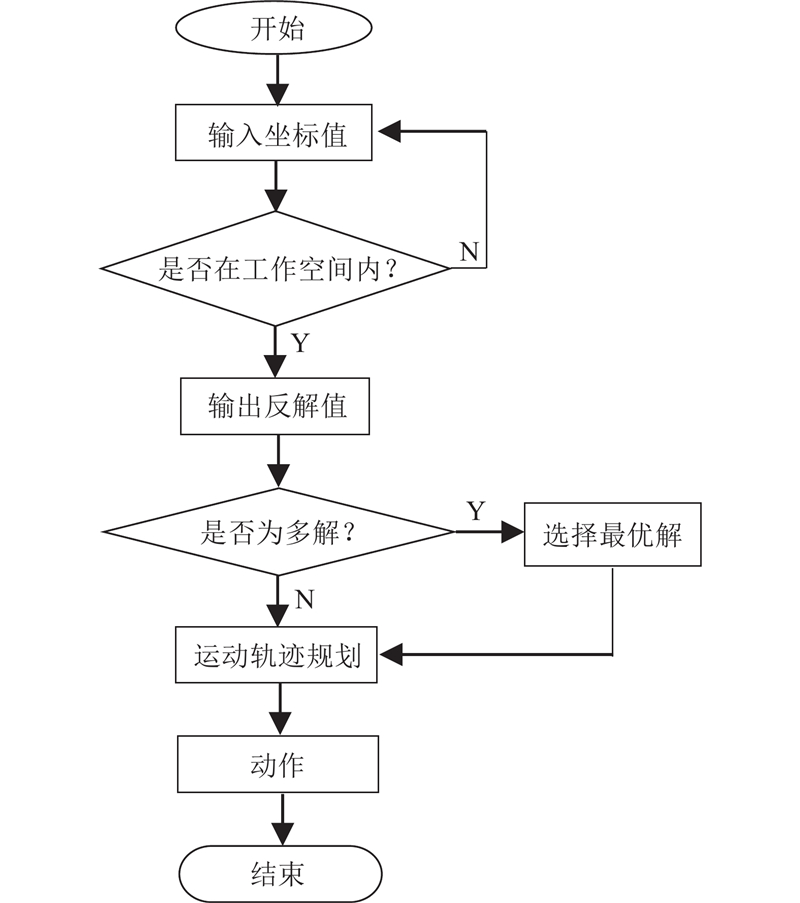
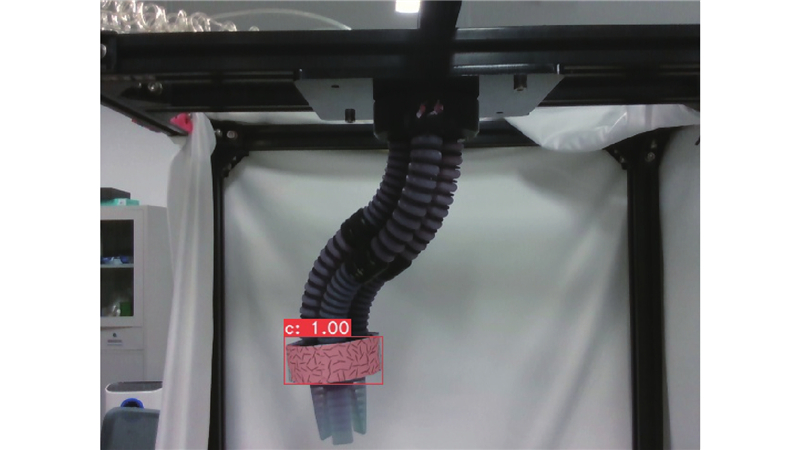
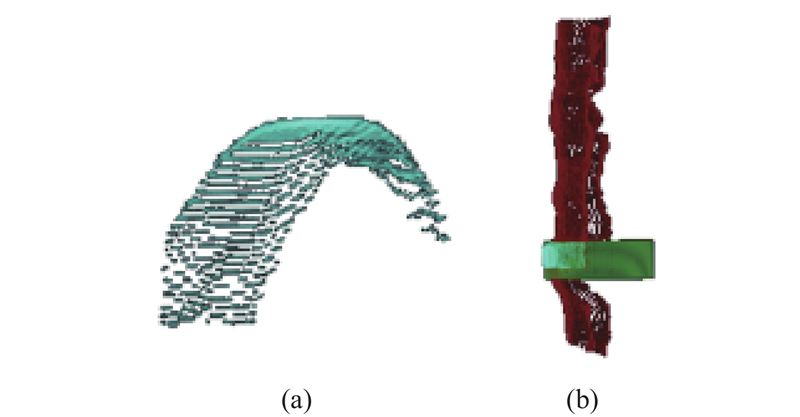
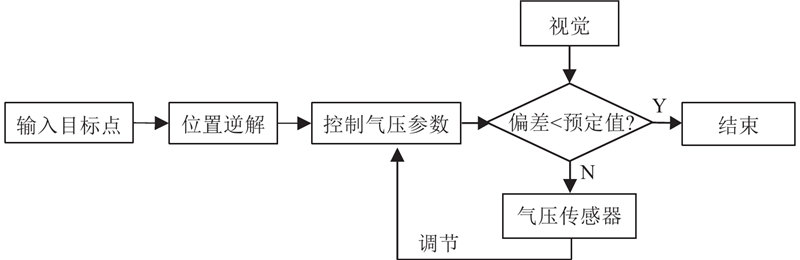
Abstract A platform for modular pneumatic soft robotic arm was designed, and a forward position model from the driving space, virtual joint space to the workspace was derived aiming at the problems of difficult modeling, poor control stability and low accuracy of soft robotic. The workspace data set was generated according to the actual structural parameter constraints. The position inverse solution was effectively completed by constructing the three-dimensional spatial index structure of KD tree. Then the solution speed was greatly improved. The proposed inverse solution selection principle was used to select the optimal solution from multiple solutions, which enhanced the control stability and accuracy of the pneumatic soft robotic arm. A real-time 3D visual positioning algorithm for the end of robotic arm combining deep learning and RANSAC algorithm was developed in order to improve the control accuracy of the end of the robot arm. Then closed-loop control of the end position and orientation of robotic arm was achieved, and about four times more precision improvement was achieved compared with open-loop control.
|
|
Received: 13 June 2024
Published: 28 July 2025
|
|
|
| Fund: 浣江实验室专项资助项目(128102-E52201/031);浙江省自然科学基金资助项目(LGG21F030003, LGG20E050011). |
基于三维视觉的软体机器人实时定位与控制
针对软体机器人建模困难、控制稳定性差和精度低等问题,设计模块化气动软体机械臂平台,推导得到从驱动空间、虚拟关节空间到工作空间的位置正解模型. 根据实际结构参数的约束生成工作空间数据集,通过构建KD树的三维空间索引结构,有效地完成了位置逆解求解,极大地提高了求解速度. 采用提出的逆解筛选原则,在多个解中选取最优解,增强了气动软体机械臂的控制稳定性及精度. 为了提升机械臂末端的控制精度,开发结合深度学习与RANSAC算法的机械臂末端三维视觉实时定位算法,实现了机械臂末端位姿的闭环控制,与开环控制相比,实现了约4倍的精度提升.
关键词:
软体机械臂,
KD树,
三维视觉,
深度学习,
运动学
|
|
| [1] |
LUAN H, WANG M, ZHANG Q, et al Variable stiffness fibers enabled universal and programmable re-foldability strategy for modular soft robotics[J]. Advanced Science, 2024, 11 (10): 2307350
doi: 10.1002/advs.202307350
|
|
|
| [2] |
郝天泽, 肖华平, 刘书海, 等 集成化智能软体机器人研究进展[J]. 浙江大学学报: 工学版, 2021, 55 (2): 229- 243
HAO Tianze, XIAO Huaping, LIU Shuhai, et al Research status of integrated intelligent soft robots[J]. Journal of Zhejiang University: Engineering Science, 2021, 55 (2): 229- 243
|
|
|
| [3] |
ARACHCHIGE D, PERERA D, MALLIKARACHCHI S, et al Soft steps: exploring quadrupedal locomotion with modular soft robots[J]. IEEE Access, 2023, 11: 63136- 63148
doi: 10.1109/ACCESS.2023.3289156
|
|
|
| [4] |
HUANG J D, ZHOU J S, WANG Z Y, et al Modular origami soft robot with the perception of interaction force and body configuration[J]. Advanced Intelligent Systems, 2022, 4 (9): 2200081
doi: 10.1002/aisy.202200081
|
|
|
| [5] |
THURUTHEL T G, ANSARI Y, FALOTICO E, et al Control strategies for soft robotic manipulators: a survey[J]. Soft Robotics, 2018, 5 (2): 149- 163
doi: 10.1089/soro.2017.0007
|
|
|
| [6] |
QU J T, XU Y N, LI Z K, et al Recent advances on underwater soft robots[J]. Advanced Intelligent Systems, 2024, 6 (2): 2300299
doi: 10.1002/aisy.202300299
|
|
|
| [7] |
WANG S, SUN Z Hydrogel and machine learning for soft robots' sensing and signal processing: a review[J]. Journal of Bionic Engineering, 2023, 20 (3): 845- 857
doi: 10.1007/s42235-022-00320-y
|
|
|
| [8] |
YIMING B, HAN Y, HAN Z, et al A mechanically robust and versatile liquid-free ionic conductive elastomer[J]. Advanced Materials, 2021, 33 (11): 2006111
doi: 10.1002/adma.202006111
|
|
|
| [9] |
SHAO X, CAI Y, YIN S, et al Mechanics of interfacial delamination in deep-sea soft robots under hydrostatic pressure[J]. Journal of Applied Mechanics, 2023, 90 (2): 021009
doi: 10.1115/1.4056214
|
|
|
| [10] |
TANG W, ZHANG Y, XU H, et al Self-protection soft fluidic robots with rapid large-area self-healing capabilities[J]. Nature Communications, 2023, 14 (1): 6430
doi: 10.1038/s41467-023-42214-5
|
|
|
| [11] |
LI G, CHEN X, ZHOU F, et al Self-powered soft robot in the Mariana Trench[J]. Nature, 2021, 591 (7848): 66- 71
doi: 10.1038/s41586-020-03153-z
|
|
|
| [12] |
XU F, WANG H Soft Robotics: morphology and morphology-inspired motion strategy[J]. IEEE-CAA Journal of Automatica Sinica, 2021, 8 (9): 1500- 1522
doi: 10.1109/JAS.2021.1004105
|
|
|
| [13] |
VINOCOUR P E T, KOKUBU S, MATSUNAGA F, et al Development of a dual function joint modular soft actuator and its evaluation using a novel dummy finger joint-soft actuator complex model[J]. IEEE Robotics and Automation Letters, 2024, 9 (5): 4210- 4217
doi: 10.1109/LRA.2024.3376975
|
|
|
| [14] |
SU M, XIE R, QIU Y, et al Design, mobility analysis and gait planning of a leech-like soft crawling robot with stretching and bending deformation[J]. Journal of Bionic Engineering, 2023, 20 (1): 69- 80
doi: 10.1007/s42235-022-00256-3
|
|
|
| [15] |
DAS R, BABU S P M, VISENTIN F, et al An earthworm-like modular soft robot for locomotion in multi-terrain environments[J]. Scientific Reports, 2023, 13 (1): 1571
doi: 10.1038/s41598-023-28873-w
|
|
|
| [16] |
ZHANG K, FAN Y, SHEN S Tunable folding assembly strategy for soft pneumatic actuators[J]. Soft Robotics, 2023, 10 (6): 1099- 1114
doi: 10.1089/soro.2022.0166
|
|
|
| [17] |
LI G, WONG T W, SHIH B, et al Bioinspired soft robots for deep-sea exploration[J]. Nature Communications, 2023, 14 (1): 7097
doi: 10.1038/s41467-023-42882-3
|
|
|
| [18] |
GONG Z, FANG X, CHEN X, et al A soft manipulator for efficient delicate grasping in shallow water: modeling, control, and real-world experiments[J]. International Journal of Robotics Research, 2021, 40 (1): 449- 469
doi: 10.1177/0278364920917203
|
|
|
| [19] |
WAN Z, SUN Y, QIN Y, et al Design, analysis, and real-time simulation of a 3D soft robotic snake[J]. Soft Robotics, 2023, 10 (2): 258- 268
doi: 10.1089/soro.2021.0144
|
|
|
| [20] |
FOKOU M R T, XIA Q, JIN H, et al A soft robotic fish actuated by artificial muscle modules (SoRoFAAM-1)[J]. Journal of Bionic Engineering, 2023, 20 (5): 2030- 2043
doi: 10.1007/s42235-023-00390-6
|
|
|
| [21] |
HABICH T L, HAACK J, BELHADJ M, et al SPONGE: open-source designs of modular articulated soft robots[J]. IEEE Robotics and Automation Letters, 2024, 9 (6): 5346- 5353
doi: 10.1109/LRA.2024.3388855
|
|
|
| [22] |
SHAN Y, ZHAO Y, YU H, et al Design and grasping force modeling for a soft robotic gripper with multi-stem twining[J]. Journal of Bionic Engineering, 2023, 20 (5): 2123- 2134
doi: 10.1007/s42235-023-00371-9
|
|
|
| [23] |
ZHANG J, LI Y, KAN Z, et al A preprogrammable continuum robot inspired by elephant trunk for dexterous manipulation[J]. Soft Robotics, 2023, 10 (3): 636- 646
doi: 10.1089/soro.2022.0048
|
|
|
| [24] |
CHEN G, LIN T, LODEWIJKS G, et al Design of an active flexible spine for wall climbing robot using pneumatic soft actuators[J]. Journal of Bionic Engineering, 2023, 20 (2): 530- 542
doi: 10.1007/s42235-022-00273-2
|
|
|
| [25] |
张志远, 王松涛, 王学谦, 等 螺线型气动软体致动器设计与建模[J]. 机器人, 2020, 42 (1): 10- 20
ZHANG Zhiyuan, WANG Songtao, WANG Xueqian, et al Design and modeling of a spiral pneumatic soft actuator[J]. Robot, 2020, 42 (1): 10- 20
|
|
|
| [26] |
夏泽洋, 陈君, 甘阳洲, 等 一种用于刚软混杂机器人仿真的耦合模型[J]. 机器人, 2021, 43 (1): 29- 35
XIA Zeyang, CHEN Jun, GAN Yangzhou, et al A coupled model for the simulation of rigid-soft hybrid robot[J]. Robot, 2021, 43 (1): 29- 35
|
|
|
| [27] |
王昱欣, 王贺升, 陈卫东 软体机器人手眼视觉/形状混合控制[J]. 机器人, 2018, 40 (5): 619- 625
WANG Yuxin, WANG Hesheng, CHEN Weidong The hybrid eye-in-hand visual/shape control for soft robots[J]. Robot, 2018, 40 (5): 619- 625
|
|
|
| [28] |
MULLER D, SAWODNY O Modeling the soft bellows of the bionic soft arm[J]. Ifac Papersonline, 2022, 55 (20): 229- 234
doi: 10.1016/j.ifacol.2022.09.100
|
|
|
| [29] |
徐璠, 王贺升 软体机械臂水下自适应鲁棒视觉伺服[J]. 自动化学报, 2023, 49 (4): 744- 753
XU Fan, WANG Hesheng Underwater adaptive robust visual servo for soft manipulator[J]. Acta Automatica Sinica, 2023, 49 (4): 744- 753
|
|
|
| [30] |
CHENG D, XU R, ZHANG B, et al Fast density estimation for density-based clustering methods[J]. Neurocomputing, 2023, 532 (1): 170- 182
|
|
|
| [31] |
徐志博, 刘永生, 户盼茹 结合离群因子和K-means++聚类改进的点云去噪算法[J]. 信息技术与信息化, 2023, (3): 21- 24
XU Zhibo, LIU Yongsheng, HU Panru Improved denoising algorithm for point cloud based on outlier factor and K-means++ clustering[J]. Information Technology and Informatization, 2023, (3): 21- 24
|
|
|
| [32] |
唐佳林, 林寿南, 周壮, 等 基于特征变换结合KD树改进ICP的快速点云配准方法[J]. 计算机科学, 2023, 50 (Suppl.2): 248- 252
TANG Jialin, LIN Shounan, ZHOU Zhuang, et al Fast point cloud registration method for improving ICP based on feature transformation combined with KD tree[J]. Computer Science, 2023, 50 (Suppl.2): 248- 252
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|