|
|
|
| Perception of distance and speed of front vehicle based on vehicle image features |
Huizhi XU( ),Xiuqing WANG ),Xiuqing WANG |
| College of Civil Engineering and Transportation, Northeast Forestry University, Harbin 150000, China |
|
|
|
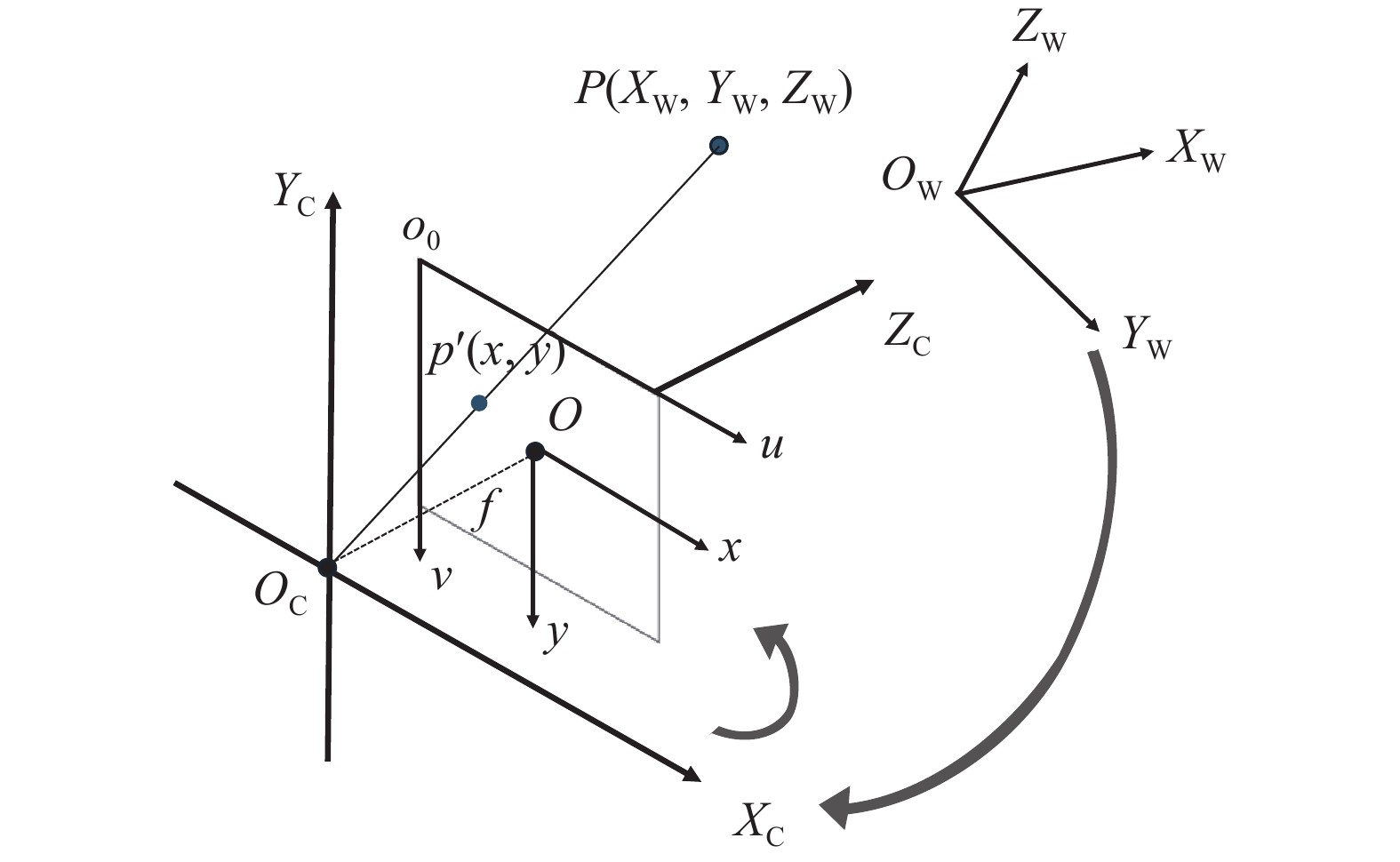
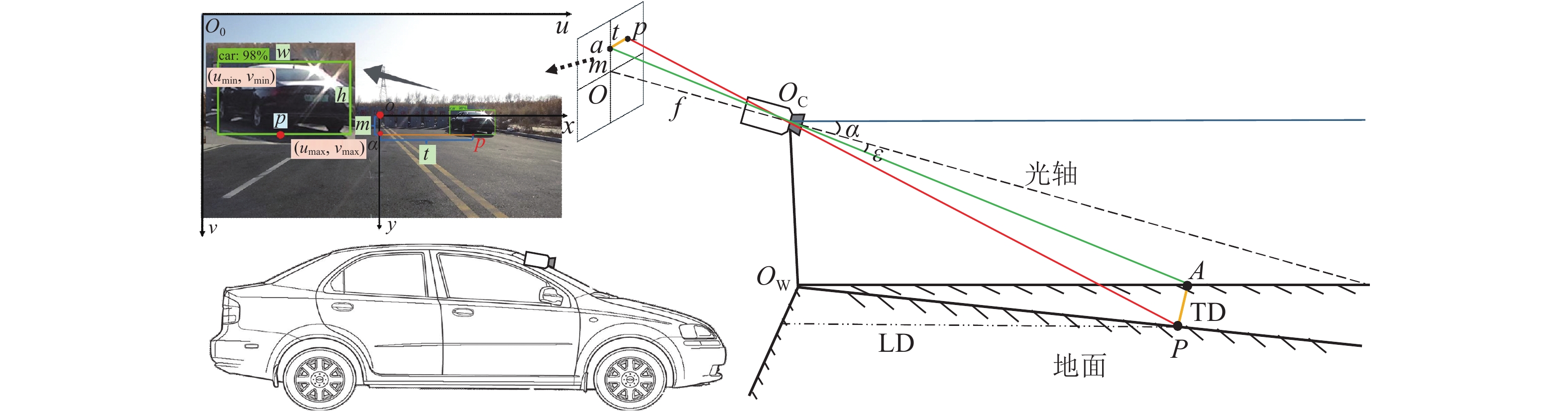
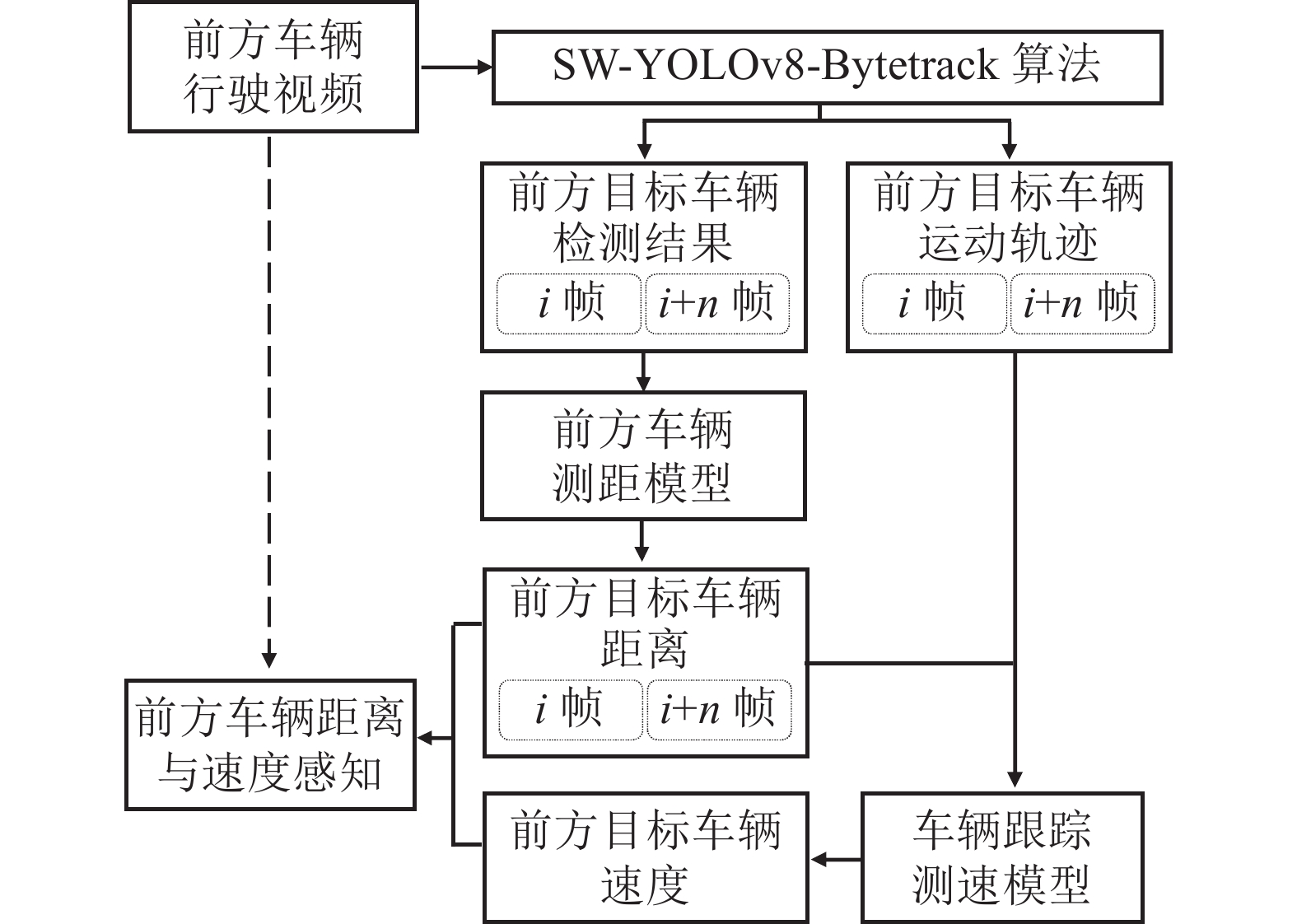
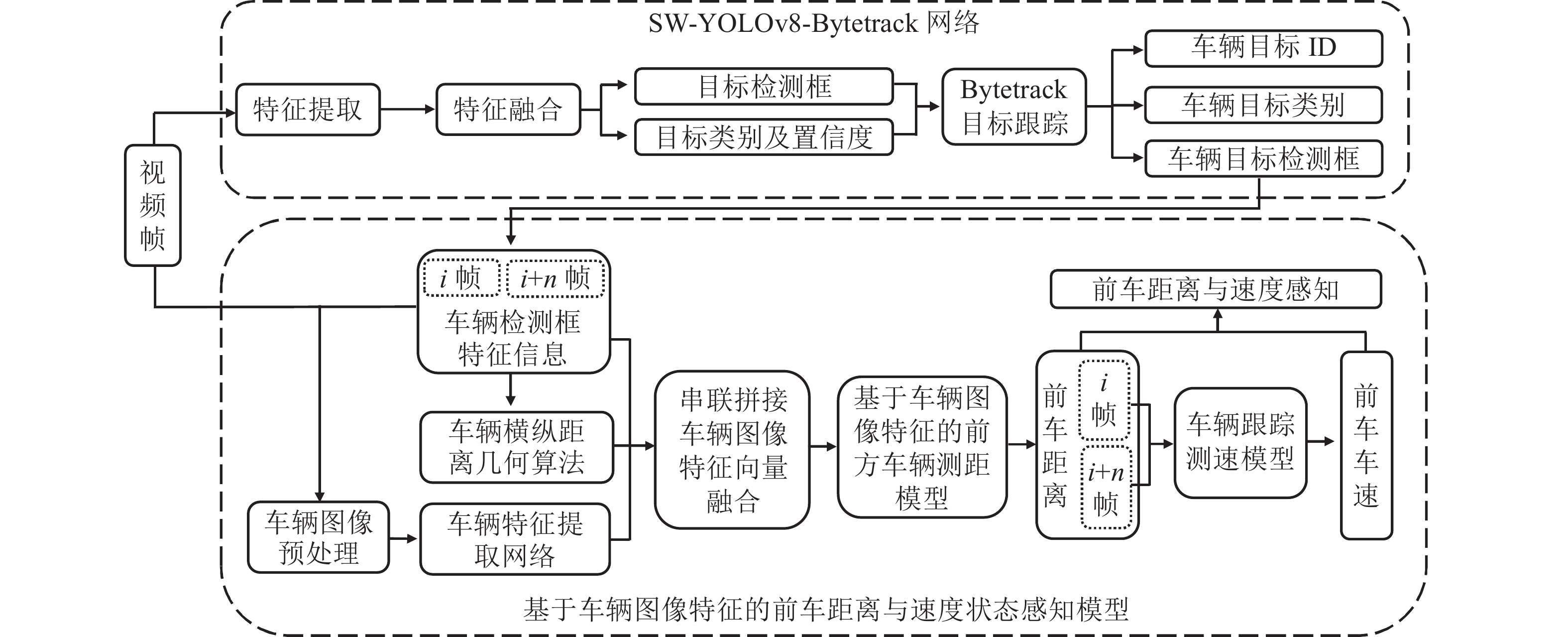
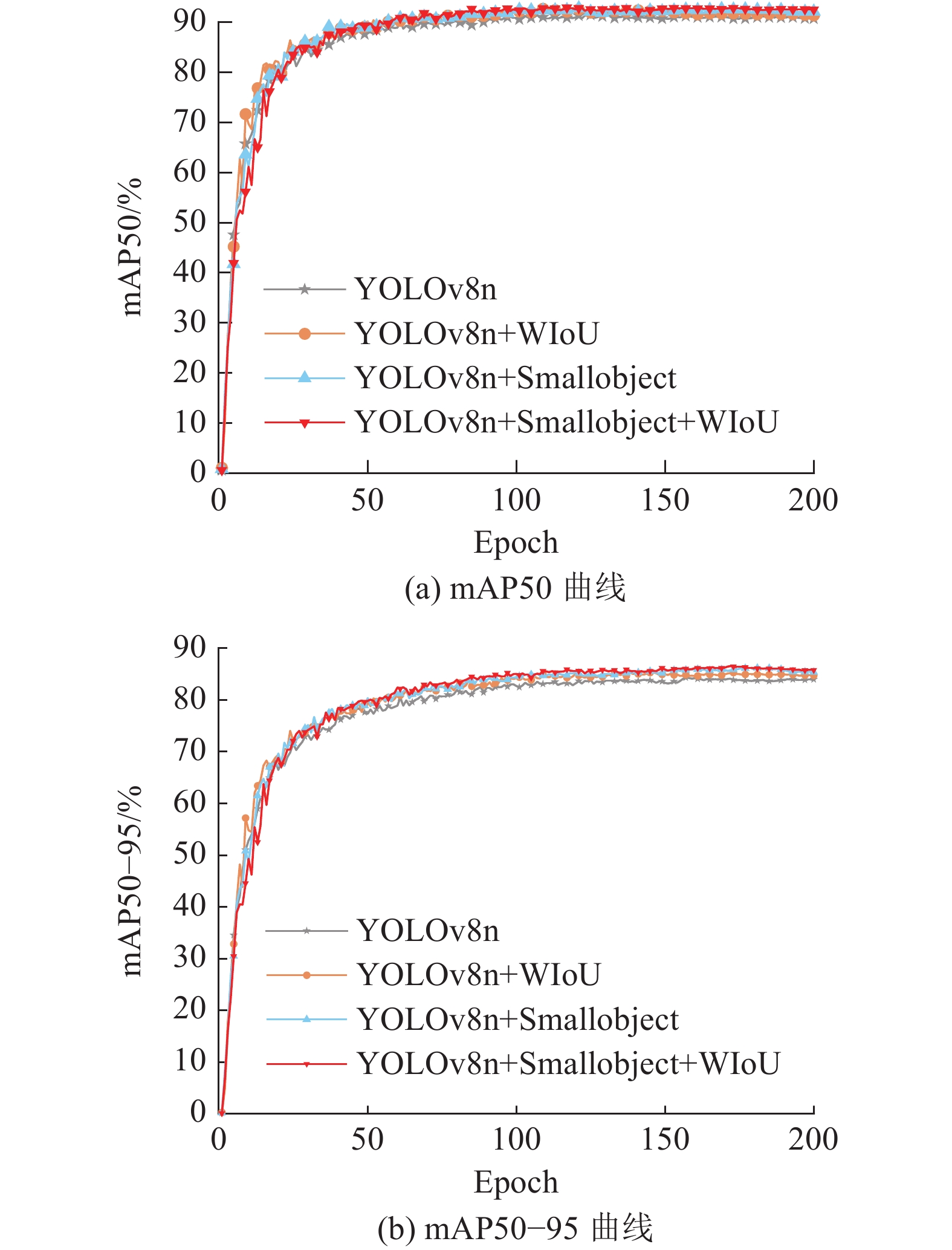
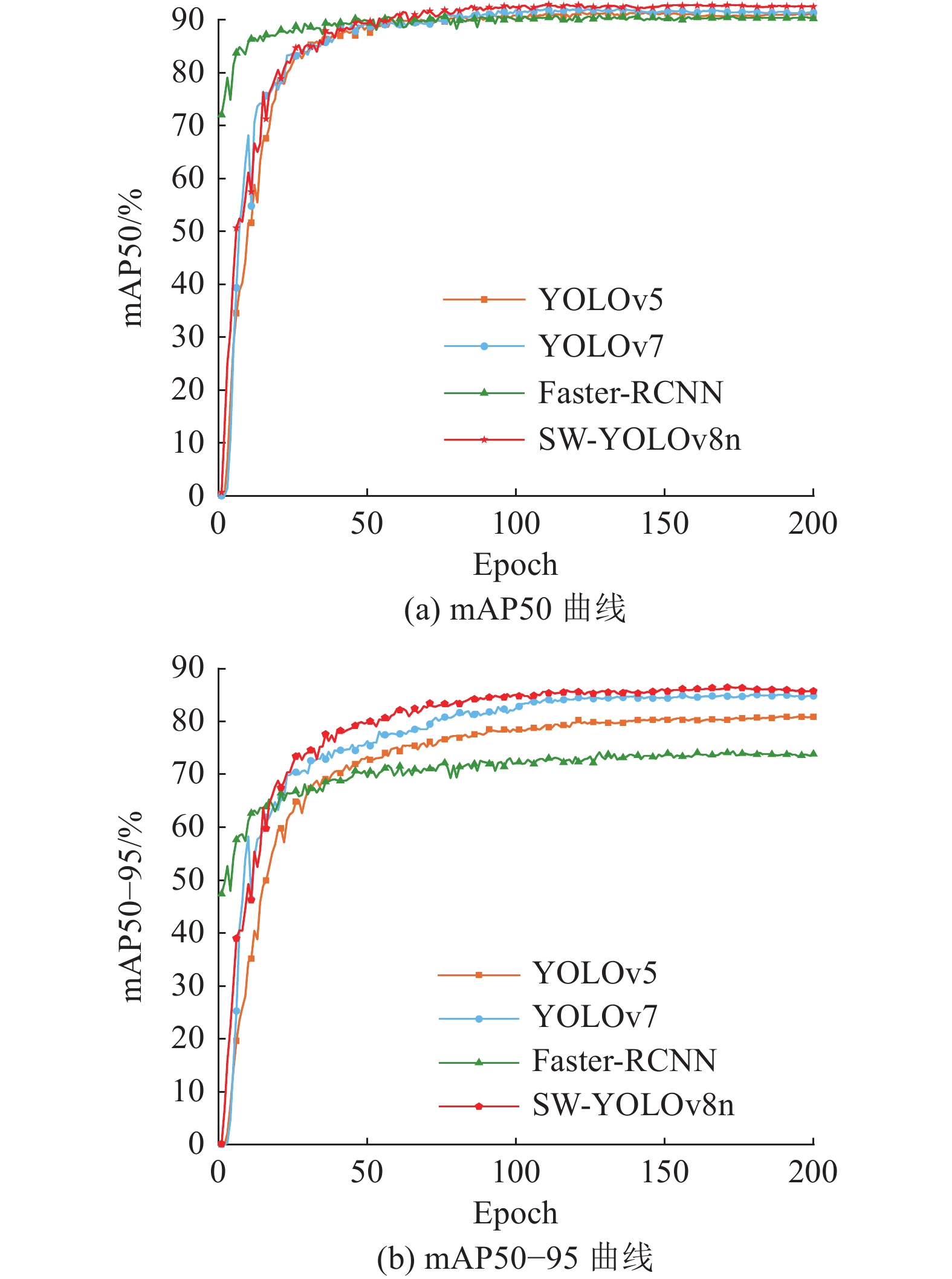
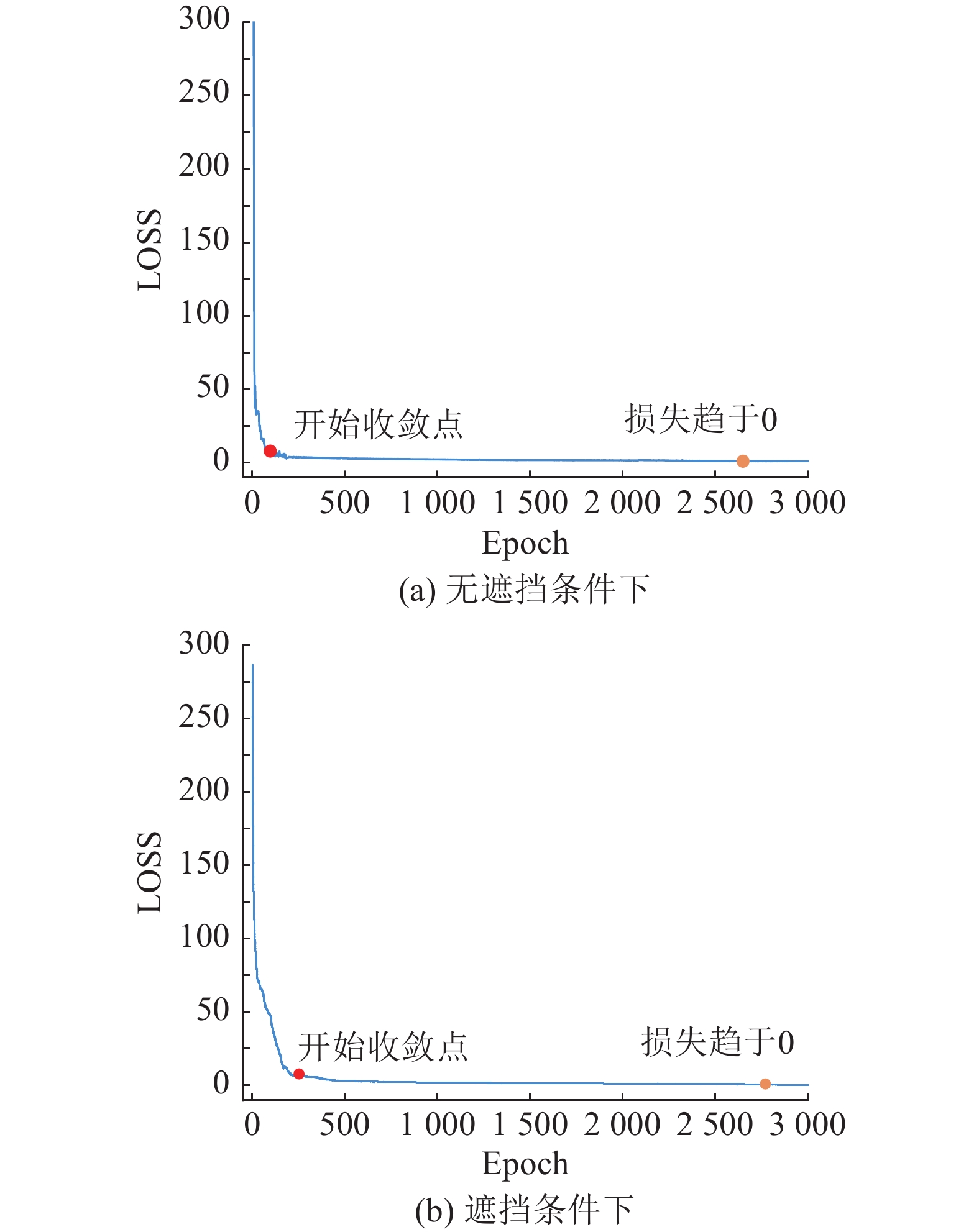
Abstract A multimodal perception method for distance and speed of front vehicle integrating vehicle image features was proposed for front vehicle detection and operational state perception in driving scenarios. The position features of vehicles in images were detected by an improved SW-YOLOv8n model, and the relative lateral and longitudinal distances to the front vehicle were calculated using geometric algorithms. A feature extraction network was designed to extract vehicle features, where image feature vectors were fused through serial concatenation, and a neural network for vehicle distance measurement was established. The multi-feature fusion module was integrated with the distance measurement neural network to construct an end-to-end front vehicle distance perception model and a vehicle tracking-based speed estimation model, which synchronously output precise distance estimations and stable speed tracking results. Experimental results demonstrated that on the test dataset, the SW-YOLOv8n model achieved improvements of 1.6 percentage points in mAP50 and 2.3 percentage points in mAP50?95 compared to the baseline YOLOv8n, while maintaining a detection speed of 260.11 frames per second. Within a lateral range of 9.5 m and a longitudinal range of 50 m, under unobstructed conditions, the preceding vehicle distance perception model exhibited an average relative error of 1.87% between predicted and actual distances, while under occluded conditions, the average relative error was 2.02%. The speed measurement results of the tracking-based model exhibited significant stability, confirming the method’s effectiveness for front vehicle distance and speed perception tasks.
|
|
Received: 30 April 2024
Published: 30 May 2025
|
|
|
| Fund: 国家自然科学基金资助项目(62371170). |
基于车辆图像特征的前车距离与速度感知
针对驾驶场景中的前车检测与运行状态感知任务,提出融合车辆图像特征的前车距离与速度的多模态感知方法. 通过改进的SW-YOLOv8n模型检测图像中车辆的位置特征,结合几何算法计算相对前车的横纵距离特征. 设计特征提取网络提取车辆特征,通过串联拼接融合车辆图像特征向量,并建立车辆测距神经网络. 通过集成多特征融合模块与车辆测距神经网络,构建前车距离感知模型与车辆跟踪测速模型,同步输出精确的距离估计和速度跟踪结果. 实验结果表明,在实验数据集上,SW-YOLOv8n相比于YOLOv8n模型,mAP50、mAP50?95分别提高1.6、2.3个百分点,SW-YOLOv8n 模型的检测速度为260.11 帧/s;在横向9.5 m与纵向50 m的范围内,在前车未被遮挡的条件下,前车距离感知模型的预测距离与实际距离的平均相对误差为1.87%,遮挡条件下的平均相对误差为2.02%;车辆跟踪测速模型的速度测定结果具有稳定性,适用于前车距离与速度感知任务.
关键词:
深度学习,
目标检测,
车辆测速,
车辆测距,
状态感知
|
|
| [1] |
WANG Z, ZHAN J, DUAN C, et al A review of vehicle detection techniques for intelligent vehicles[J]. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34 (8): 3811- 3831
doi: 10.1109/TNNLS.2021.3128968
|
|
|
| [2] |
JIN M, SUN C, HU Y An intelligent traffic detection approach for vehicles on highway using pattern recognition and deep learning[J]. Soft Computing, 2023, 27 (8): 5041- 5052
doi: 10.1007/s00500-022-07375-3
|
|
|
| [3] |
WANG F, WANG H, QIN Z, et al UAV target detection algorithm based on improved YOLOv8[J]. IEEE Access, 2023, 11: 116534- 116544
doi: 10.1109/ACCESS.2023.3325677
|
|
|
| [4] |
ZHANG L J, FANG J J, LIU Y X, et al CR-YOLOv8: multiscale object detection in traffic sign images[J]. IEEE Access, 2023, 12: 219- 228
|
|
|
| [5] |
MA S, LU H, LIU J, et al LAYN: lightweight multi-scale attention YOLOv8 network for small object detection[J]. IEEE Access, 2024, 12: 29294- 29307
doi: 10.1109/ACCESS.2024.3368848
|
|
|
| [6] |
张长弓, 杨海涛, 王晋宇, 等 基于深度学习的视觉单目标跟踪综述[J]. 计算机应用研究, 2021, 38 (10): 2888- 2895
ZHANG Changgong, YANG Haitao, WANG Jinyu, et al Survey on visual single object tracking based on deep learning[J]. Application Research of Computers, 2021, 38 (10): 2888- 2895
|
|
|
| [7] |
BERTINETTO L, VALMADRE J, HENRIQUES J F, et al. Fully-convolutional Siamese networks for object tracking [C]// Computer Vision-ECCV 2016 Workshops. Amsterdam: Springer International Publishing, 2016: 850–865.
|
|
|
| [8] |
聂源, 赖惠成, 高古学 改进YOLOv7+Bytetrack的小目标检测与追踪[J]. 计算机工程与应用, 2024, 60 (12): 189- 202
NIE Yuan, LAI Huicheng, GAO Guxue Improved small target detection and tracking with YOLOv7+Bytetrack[J]. Computer Engineering and Applications, 2024, 60 (12): 189- 202
doi: 10.3778/j.issn.1002-8331.2311-0372
|
|
|
| [9] |
ZHENG Z, LI J, QIN L YOLO-BYTE: an efficient multi-object tracking algorithm for automatic monitoring of dairy cows[J]. Computers and Electronics in Agriculture, 2023, 209: 107857
doi: 10.1016/j.compag.2023.107857
|
|
|
| [10] |
PANDHARIPANDE A, CHENG C H, DAUWELS J, et al Sensing and machine learning for automotive perception: a review[J]. IEEE Sensors Journal, 2023, 23 (11): 11097- 11115
doi: 10.1109/JSEN.2023.3262134
|
|
|
| [11] |
《中国公路学报》编辑部 中国汽车工程学术研究综述·2023[J]. 中国公路学报, 2023, 36 (11): 1- 192
Editorial Department of China Journal of Highway and Transport Review on China’s automotive engineering research progress: 2023[J]. China Journal of Highway and Transport, 2023, 36 (11): 1- 192
|
|
|
| [12] |
DIRGANTARA F M, ROHMAN A S, YULIANTI L. Object distance measurement system using monocular camera on vehicle [C]// 6th International Conference on Electrical Engineering, Computer Science and Informatics. Bandung: IEEE, 2019: 122–127.
|
|
|
| [13] |
SONG Z, LU J, ZHANG T, et al. End-to-end learning for inter-vehicle distance and relative velocity estimation in ADAS with a monocular camera [C]// IEEE International Conference on Robotics and Automation. Paris: IEEE, 2020: 11081–11087.
|
|
|
| [14] |
LIU J, ZHANG R Vehicle detection and ranging using two different focal length cameras[J]. Journal of Sensors, 2020, 2020 (1): 4372847
|
|
|
| [15] |
LIU Q, CHEN B, WANG F, et al. Vehicle distance estimation based on monocular vision and CNN [C]// International Conference on Computer Information Science and Artificial Intelligence. Kunming: IEEE, 2021: 638–641.
|
|
|
| [16] |
GAO W, CHEN Y, LIU Y, et al Distance measurement method for obstacles in front of vehicles based on monocular vision[J]. Journal of Physics: Conference Series, 2021, 1815 (1): 012019
doi: 10.1088/1742-6596/1815/1/012019
|
|
|
| [17] |
CZAJEWSKI W, IWANOWSKI M. Vision-based vehicle speed measurement method [C]// Computer Vision and Graphics. Berlin, Heidelberg: Springer, 2010: 308–315.
|
|
|
| [18] |
ARENADO M I, ORIA J M P, TORRE-FERRERO C, et al Monovision-based vehicle detection, distance and relative speed measurement in urban traffic[J]. IET Intelligent Transport Systems, 2014, 8 (8): 655- 664
doi: 10.1049/iet-its.2013.0098
|
|
|
| [19] |
YANG L, LI M, SONG X, et al Vehicle speed measurement based on binocular stereovision system[J]. IEEE Access, 2019, 7: 106628- 106641
doi: 10.1109/ACCESS.2019.2932120
|
|
|
| [20] |
YANG L, LUO J, SONG X, et al Robust vehicle speed measurement based on feature information fusion for vehicle multi-characteristic detection[J]. Entropy, 2021, 23 (7): 910
doi: 10.3390/e23070910
|
|
|
| [21] |
TONG Z, CHEN Y, XU Z, et al. Wise-IoU: bounding box regression loss with dynamic focusing mechanism [EB/OL]. [2023-12-16]. https://doi.org/10.48550/arXiv.2301.10051.
|
|
|
| [22] |
ZHANG Y, SUN P, JIANG Y, et al. ByteTrack: multi-object tracking by associating every detection box [C]// European Conference on Computer Vision. Cham: Springer, 2022: 1–21.
|
|
|
| [23] |
ZHANG Z A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22 (11): 1330- 1334
doi: 10.1109/34.888718
|
|
|
| [24] |
徐慧智, 蒋时森, 王秀青, 等 基于深度学习的车载图像车辆目标检测和测距[J]. 吉林大学学报: 工学版, 2025, 55 (1): 185- 197
XU Huizhi, JIANG Shisen, WANG Xiuqing, et al Vehicle target detection and ranging in vehicle image based on deep learning[J]. Journal of Jilin University: Engineering and Technology Edition, 2025, 55 (1): 185- 197
|
|
|
| [25] |
WANG C Y, BOCHKOVSKIY A, LIAO H M. YOLOv7: trainable bag-of-freebies sets new state-of-the-art for real-time object detectors [C]// IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver: IEEE, 2023: 7464–7475.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|