Multi-task environment perception algorithm for autonomous driving based on axial attention
Shenchong LI1(),Xinhua ZENG2,*(),Chuanqu LIN1
1. School of Information Engineering, Huzhou University, Huzhou 313000, China 2. Academy for Engineering and Technology, Fudan University, Shanghai 200433, China
A new algorithm was proposed based on a shared backbone network to meet the autonomous driving requirements and to improve the synergy effect among multiple models. An axial attention mechanism was added to the backbone network, and connections between global key points were established while maintaining lightweight feature extraction to enhance the location representation of the model. The adaptive weight allocation method, along with the implementation of a three-dimensional attention mechanism, was devised to mitigate the information conflict that emerges from the diverse scale features present in the multi-scale information extraction phase. The loss function was optimized based on the challenging sample region, and the capacity of the proposed algorithm to capture intricate details in the difficult sample region was strengthened. Experimental results in the BDD100K dataset showed that compared with YOLOP, the proposed algorithm improved the mean average accuracy in the traffic target detection task (at IoU=50%) by 3.3 percentage points, the mIoU in road drivable area segmentation task by 1.0 percentage points, the accuracy of lane line detection by 6.7 percentage points, and the reasoning speed was 223.7 frames per second. The proposed algorithm demonstrates excellent performance in traffic target detection, drivable area segmentation, and lane line detection, and achieves a good balance between detection accuracy and reasoning speed at the same time.
Shenchong LI,Xinhua ZENG,Chuanqu LIN. Multi-task environment perception algorithm for autonomous driving based on axial attention. Journal of ZheJiang University (Engineering Science), 2025, 59(4): 769-777.
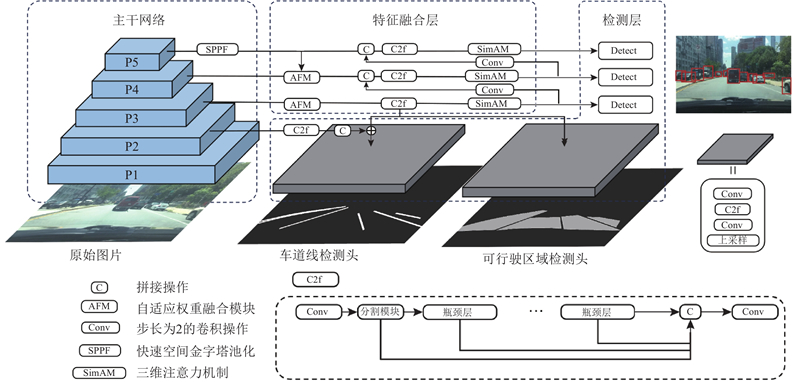
Fig.1Framework of multi-task environment perception algorithm for autonomous driving based on axial attention
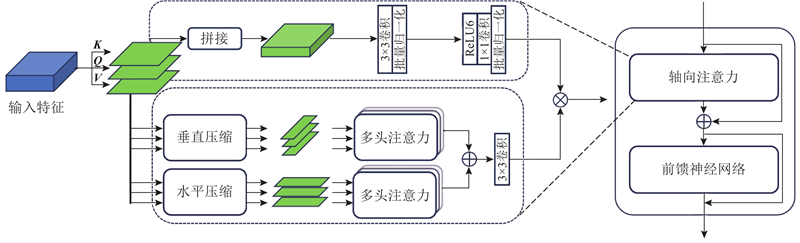
Fig.2Framework of Sea-Attention module
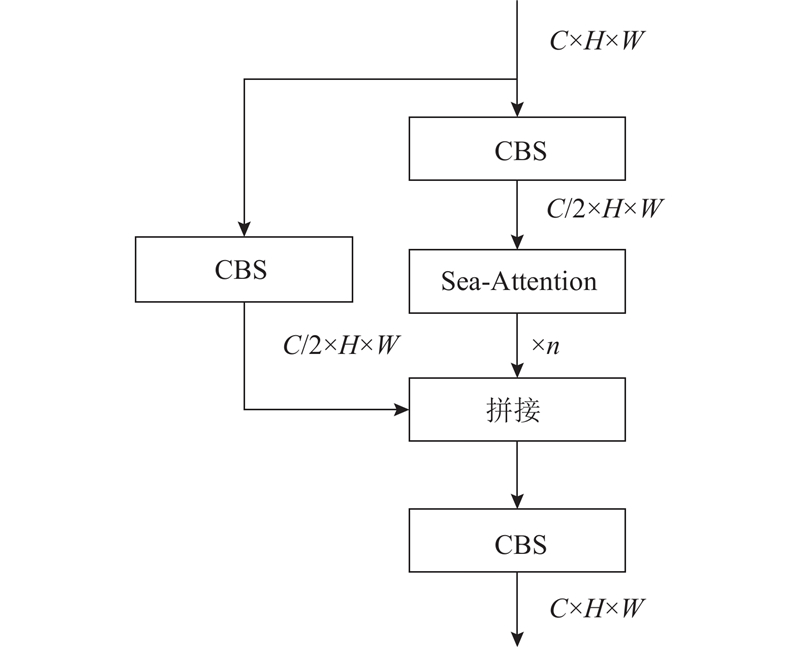
Fig.3Structure of improved cross stage partial module
Fig.4Structure of adaptive-weight fusion module
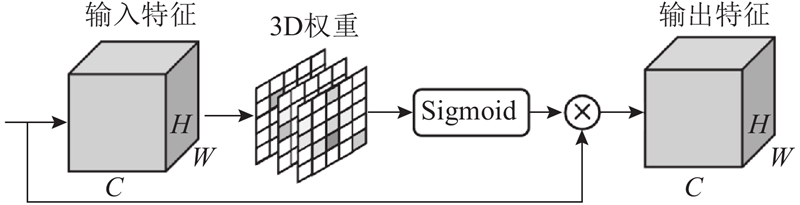
Fig.5Modular structure of SimAM 3D attention mechanism
Fig.6Structure of decoupled detection head
Fig.7Examples of different scenarios and weather images in BDD100K dataset
算法
R/%
mAP50/%
FPS(帧·s?1)
YOLOv5s*
86.8
77.2
458.5
YOLOv8s*
82.2
75.1
420.4
HybridNets
92.8
77.3
69.6
YOLOP
89.2
76.5
214.5
T-YOLOP
89.1
79.8
223.7
Tab.1Traffic target detection results of different algorithms in BDD100K dataset
算法
mIoU/%
FPS(帧·s?1)
DeeplabV3(ResNet18)*
88.23
191.0
BiseNet(ResNet18)*
89.67
349.3
STDC(STDC1446)*
91.06
274.5
HybridNets
90.5
69.6
YOLOP
91.5
214.5
T-YOLOP
92.5
223.7
Tab.2Drivable area segmentation results of different algorithms in BDD100K dataset
算法
Acc/%
IoU/%
ENet*
34.12
14.6
SCNN*
35.79
15.8
ENet-SAD*
36.56
16.0
STDC*
65.05
23.8
HybridNets
85.4
31.6
YOLOP
70.5
26.2
T-YOLOP
77.2
26.8
Tab.3Lane line detection results of different algorithms in BDD100K dataset
Fig.8Comparison of different algorithms for traffic environment perception in daytime road scenes
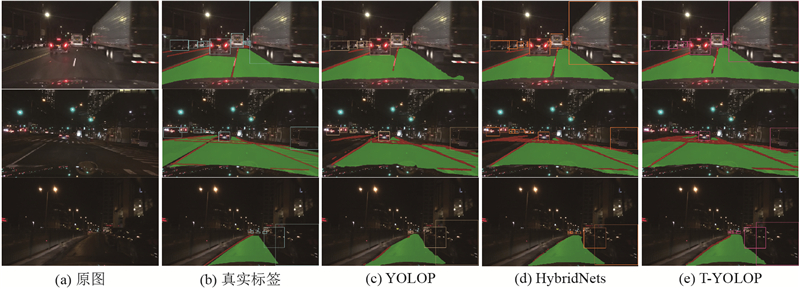
Fig.9Comparison of different algorithms for traffic environment perception in night road scenes
模型编号
AFM
Loss
Sea-Attention
Head
SimAM
R/%
mAP50/%
mIoU/%
Acc/%
IoU/%
FPS/(帧·s?1)
1
—
—
—
—
—
89.6
76.2
91.1
69.8
24.1
283.4
2
√
—
—
—
—
89.7
76.4
91.2
71.6
24.3
260.9
3
√
√
—
—
—
90.1
77.0
91.9
73.7
25.5
260.9
4
—
√
√
—
—
90.1
77.4
92.0
74.4
26.4
239.9
5
√
√
√
—
—
90.4
78.5
92.3
75.9
26.5
200.1
6
√
—
√
√
—
86.6
78.1
91.9
73.8
26.0
228.7
7
√
√
√
√
—
88.8
80.1
92.5
77.3
26.8
228.7
8
√
√
√
√
√
89.1
79.8
92.5
77.2
26.8
223.7
Tab.4Experimental results of modular ablation for proposed algorithm
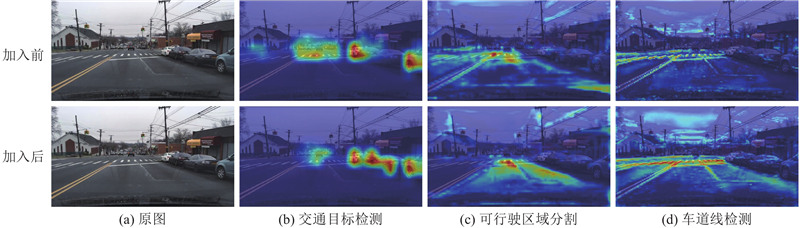
Fig.10Visualizations before and after adding Sea-Attention module
[1]
LIANG X, NIU M, HAN J, et al. Visual exemplar driven task-prompting for unified perception in autonomous driving [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Vancouver: IEEE, 2023: 9611–9621.
[2]
LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot MultiBox detector [C]// Computer Vision – ECCV 2016 . [S. l.]: Springer, 2016: 21–37.
[3]
REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Las Vegas: IEEE, 2016: 779–788.
[4]
REDMON J, FARHADI A. YOLOv3: an incremental improvement [EB/OL]. (2018–04–08)[2024–03–08]. https://www.arxiv.org/pdf/1804.02767.
[5]
BOCHKOVSKIY A, WANG C Y, LIAO H M, et al. YOLOv4: optimal speed and accuracy of object detection [EB/OL]. (2020–4–23)[2024–01–22]. https://arxiv.org/pdf/2004.10934.
[6]
蒋超, 张豪, 章恩泽, 等 基于改进YOLOv5s的行人车辆目标检测算法[J]. 扬州大学学报: 自然科学版, 2022, 25 (6): 45- 49 JIANG Chao, ZHANG Hao, ZHANG Enze, et al Pedestrian and vehicle target detection algorithm based on the improved YOLOv5s[J]. Journal of Yangzhou University: Natural Science Edition, 2022, 25 (6): 45- 49
[7]
韩俊, 袁小平, 王准, 等 基于YOLOv5s的无人机密集小目标检测算法[J]. 浙江大学学报: 工学版, 2023, 57 (6): 1224- 1233 HAN Jun, YUAN Xiaoping, WANG Zhun, et al UAV dense small target detection algorithm based on YOLOv5s[J]. Journal of Zhejiang University: Engineering Science, 2023, 57 (6): 1224- 1233
[8]
GIRSHICK R. Fast R-CNN [C]// Proceedings of the IEEE International Conference on Computer Vision . Santiago: IEEE, 2015: 1440–1448.
[9]
REN S, HE K, GIRSHICK R, et al Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39 (6): 1137- 1149
doi: 10.1109/TPAMI.2016.2577031
[10]
CHEN L C, PAPANDREOU G, KOKKINOS I, et al DeepLab: semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected CRFs[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40 (4): 834- 848
[11]
LIN G, MILAN A, SHEN C, et al. RefineNet: multi-path refinement networks for high-resolution semantic segmentation [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Honolulu: IEEE, 2017: 5168–5177.
[12]
ZHAO H, SHI J, QI X, et al. Pyramid scene parsing network [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Honolulu. IEEE, 2017: 6230–6239.
[13]
YU C, WANG J, PENG C, et al. BiSeNet: bilateral segmentation network for real-time semantic segmentation [C]// Computer Vision – ECCV 2018 . [S.l.]: Springe, 2018: 334–349.
[14]
FAN M, LAI S, HUANG J, et al. Rethinking BiSeNet for real-time semantic segmentation [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Nashville: IEEE, 2021: 9711–9720.
[15]
WANG Z, REN W, QIU Q. LaneNet: real-time lane detection networks for autonomous driving [EB/OL]. (2018–07–04)[2024–03–08]. https://arxiv.org/pdf/1807.01726.
[16]
TEICHMANN M, WEBER M, ZOELLNER M, et al. MultiNet: real-time joint semantic reasoning for autonomous driving [EB/OL]. (2016–12–22)[2024–03–08]. https://arxiv.org/pdf/1612.07695.
[17]
QIAN Y, DOLAN J M, YANG M DLT-Net: joint detection of drivable areas, lane lines, and traffic objects[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21 (11): 4670- 4679
[18]
WU D, LIAO M W, ZHANG W T, et al YOLOP: you only look once for panoptic driving perception[J]. Machine Intelligence Research, 2022, 19 (6): 550- 562
[19]
VU D, NGO B, PHAN H. HybridNets: end-to-end perception network [EB/OL]. (2022–03–17)[2024–03–08]. https://arxiv.org/pdf/2203.09035.
[20]
DOSOVITSKIY A, BEYER L, KOLESNIKOV A, et al. An image is worth 16x16 words: transformers for image recognition at scale [EB/OL]. (2021–06–03)[2024–03–08]. https://arxiv.org/pdf/2010.11929.
[21]
CARION N, MASSA F, SYNNAEVE G, et al. End-to-end object detection with transformers [C]// Computer Vision – ECCV 2020 . [S.l.]: Springer, 2020: 213–229.
[22]
LIU Z, LIN Y, CAO Y, et al. Swin Transformer: hierarchical vision transformer using shifted windows [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . Montreal: IEEE, 2021: 9992–10002.
[23]
WAN Q, HUANG Z, LU J, et al. SeaFormer++: squeeze-enhanced axial transformer for mobile semantic segmentation [EB/OL]. (2023–06–09)[2024–03–08]. https://arxiv.org/pdf/2301.13156.
[24]
LIU S, QI L, QIN H, et al. Path aggregation network for instance segmentation [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Salt Lake City: IEEE, 2018: 8759–8768.
[25]
WOO S, PARK J, LEE J Y, et al. CBAM: convolutional block attention module [C]// Computer Vision – ECCV 2018 . [S.l.]: Springer, 2018: 3–19.
[26]
YANG L, ZHANG R Y, LI L, et al. SimAM: a simple, parameter-free attention module for convolutional neural networks [C]// Proceeding of the 38th International Conference on Machine Learning . Vienna: ACM, 2021: 11863-11874.
[27]
DUAN K, BAI S, XIE L, et al. CenterNet: keypoint triplets for object detection [C]// Proceedings of the IEEE/CVF International Conference on Computer Vision . Seoul: IEEE, 2019: 6569–6578.
[28]
ZHANG Y, ZHANG W, YU J, et al Complete and accurate holly fruits counting using YOLOX object detection[J]. Computers and Electronics in Agriculture, 2022, 198: 107062
[29]
LI X, WANG W, WU L, et al Generalized focal loss: Learning qualified and distributed bounding boxes for dense object detection[J]. Advances in Neural Information Processing Systems, 2020, 33: 21002- 21012