|
|
|
| Selection of lane-changing distance for vehicles in urban expressway interchange weaving section |
Yi ZHAO1( ),Chun AN2,Minghao LI1,Jianxiao MA1,Shuo HUAI1 ),Chun AN2,Minghao LI1,Jianxiao MA1,Shuo HUAI1 |
1. College of Automobile and Traffic Engineering, Nanjing Forestry University, Nanjing 210037, China
2. School of Traffic and Transportation, Lanzhou Jiaotong University, Lanzhou 730070, China |
|
|
|
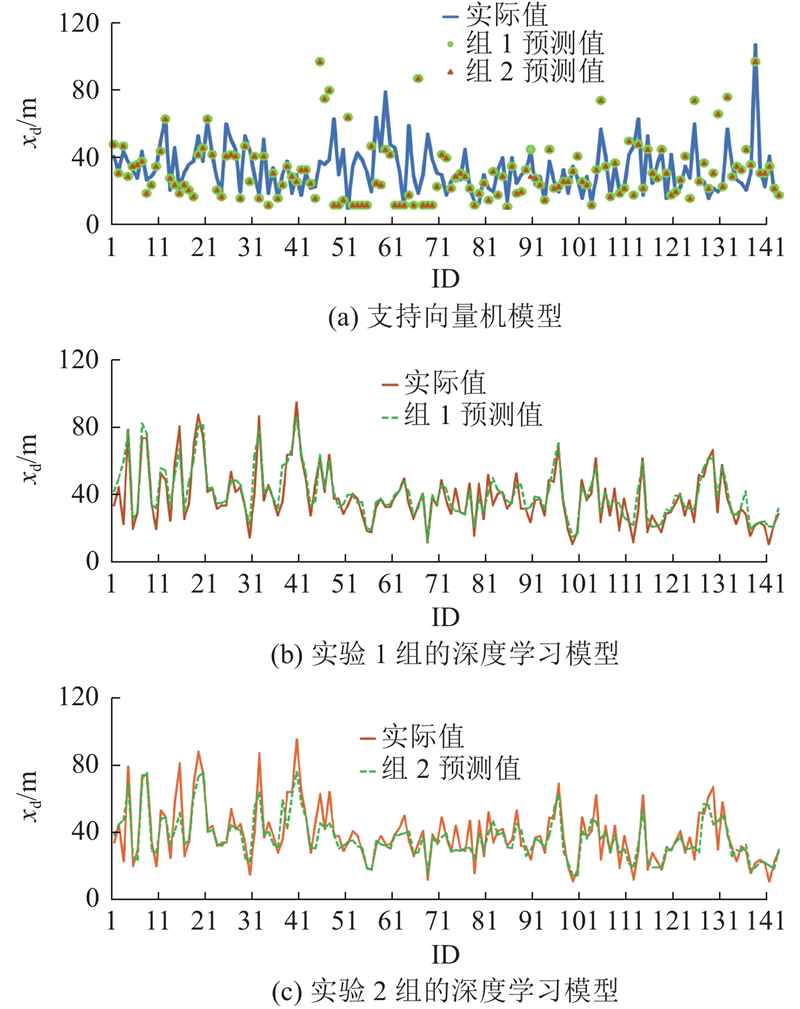
Abstract The selection behavior of the lane-changing distance in the lane-changing process was examined by taking the lane-changing behavior in the urban expressway interchange weaving section as an object. Utilizing measured vehicle trajectory data, causal inference theory was applied to identify key factors influencing the choice of lane-changing distance. The factors included the velocity and lane-changing duration of the target vehicle before and after lane-changing, as well as the distance between the current lane and the vehicles in front and behind the target lane. The support vector model and the deep learning model were employed respectively to establish models for lane-changing distance selection behavior to test the validity of the influencing factor analysis. Results show that the screened factors contribute to enhancing the prediction speed of the behavioral choice model and improving the prediction accuracy of the deep learning model. While the support vector model offers faster predictions, it falls behind in prediction accuracy compared to the deep learning model. Conducting characteristic analysis on typical lane-changing behaviors provided a foundational basis for formulating management strategies in the urban expressway interchange weaving section, effectively supplementing existing research on lane-changing behavioral characteristics and offering a nuanced portrayal of the lane-changing process.
|
|
Received: 10 November 2023
Published: 18 January 2025
|
|
|
| Fund: 国家自然科学基金资助项目(62303228);教育部人文社会科学研究项目(23YJC630253). |
城市快速路互通交织区车辆的换道持续距离选择
以城市快速路互通交织区换道行为为对象,研究换道过程中换道持续距离的选择行为. 以实测车行轨迹数据为基础,利用因果推断理论识别影响换道持续距离选择的主要因素:目标车辆换道前后的速度和换道持续时间、当前车道和目标车道前后车的间距. 分别利用支持向量机模型和深度学习模型进行换道持续距离选择行为建模,检验换道持续距离选择行为影响因素分析的有效性. 结果表明,经筛选后的影响因素提高了行为选择模型的预测速度以及深度学习模型的预测精度;支持向量模型虽然预测速度更快,但预测精度不如深度学习模型. 对典型换道行为进行特征分析,为城市快速路互通交织区管理方案的制定奠定了理论基础,是对换道过程行为特征研究的有效补充,精确刻画了换道行为过程.
关键词:
城市快速路互通交织区,
换道持续距离,
因果推断,
支持向量机,
深度学习
|
|
| [1] |
GAO K, LI X, HU L, et al Instantaneous lane-changing type aware lane change prediction based on LSTM in mixed traffic scenario[J]. Journal of Circuits, Systems and Computers, 2022, 31 (10): 2250180
doi: 10.1142/S0218126622501808
|
|
|
| [2] |
OUYANG P, WU J, XU C, et al Traffic safety analysis of inter-tunnel weaving section with conflict prediction models[J]. Journal of Transportation Safety and Security, 2020, 14 (4): 1- 25
|
|
|
| [3] |
吴中, 梁明琰, 杨海飞 基于换道时间分布的交通流随机微分方程[J]. 浙江大学学报: 工学版, 2023, 57 (8): 1629- 1635
WU Zhong, LIANG Mingtan, YANG Haifei Stochastic differential equation of traffic flow model based on distribution of lane-changing duration[J]. Journal of Zhejiang University: Engineering Science, 2023, 57 (8): 1629- 1635
|
|
|
| [4] |
SUN J, ZUO K, JIANG S, et al Modeling and predicting stochastic merging behaviors at freeway on-ramp bottlenecks[J]. Journal of Advanced Transportation, 2018, 2018 (1): 1- 15
|
|
|
| [5] |
XING L, HE J, LI Y, et al Comparison of different models for evaluating vehicle collision risks at upstream diverging area of toll plaza[J]. Accident Analysis and Prevention, 2020, 135: 105343
doi: 10.1016/j.aap.2019.105343
|
|
|
| [6] |
ZHAO Y, WANG Z, WU Y, et al Trajectory-based characteristic analysis and decision modeling of the lane-changing process in intertunnel weaving sections[J]. PloS One, 2022, 17 (4): e0266489
doi: 10.1371/journal.pone.0266489
|
|
|
| [7] |
PARK H, OH C, MOON J, et al Development of a lane change risk index using vehicle trajectory data[J]. Accident Analysis and Prevention, 2018, 110: 1- 8
doi: 10.1016/j.aap.2017.10.015
|
|
|
| [8] |
SHANGGUAN Q Q, FU T, WANG J, et al A proactive lane-changing risk prediction framework considering driving intention recognition and different lane-changing patterns[J]. Accident Analysis and Prevention, 2022, 164: 106500
doi: 10.1016/j.aap.2021.106500
|
|
|
| [9] |
王少杰, 曲大义, 刘浩敏, 等 面向数据驱动的车辆跟驰行为建模[J]. 公路交通科技, 2023, 40 (11): 222- 228
WANG Shaojie, QU Dayi, LIU Haomin, et al Modeling of car-following behavior based on data-driven method[J]. Journal of Highway and Transportation Research and Development, 2023, 40 (11): 222- 228
doi: 10.3969/j.issn.1002-0268.2023.11.026
|
|
|
| [10] |
ZHANG X, SUN J, QI X, et al Simultaneous modeling of car-following and lane-changing behaviors using deep learning[J]. Transportation Research Part C: Emerging Technologies, 2019, 104: 287- 304
doi: 10.1016/j.trc.2019.05.021
|
|
|
| [11] |
曲昭伟, 潘昭天, 陈永恒, 等 基于最优速度模型的改进安全距离跟驰模型[J]. 吉林大学学报: 工学版, 2019, 49 (4): 1092- 1099
QU Zhaowei, PAN Zhaotian, CHEN Yongheng, et al Car-following model with improving safety distance based on optimal velocity model[J]. Journal of Jilin University: Engineering and Technology Edition, 2019, 49 (4): 1092- 1099
|
|
|
| [12] |
李根, 翟伟, 邬岚 基于梯度提升决策树的汇合交互作用研究[J]. 浙江大学学报: 工学版, 2022, 56 (4): 649- 655
LI Gen, ZHAI Wei, WU Lan Study of merging interactions based on gradient boosting decision tree[J]. Journal of Zhejiang University: Engineering Science, 2022, 56 (4): 649- 655
|
|
|
| [13] |
郭俊超, 邵金菊, 袁俊凯, 等 基于虚拟车道线的智能车辆换道轨迹规划方法[J]. 汽车技术, 2023, (11): 19- 26
GUO Junchao, SHAO Jinju, YUAN Junkai, et al Lane change trajectory planning method of intelligent vehicle based on virtual lane[J]. Automobile Technology, 2023, (11): 19- 26
|
|
|
| [14] |
PENG Y, LIU S, YU D Z An improved car-following model with consideration of multiple preceding and following vehicles in a driver’s view[J]. Physica A: Statistical Mechanics and its Applications, 2020, 538: 122967
doi: 10.1016/j.physa.2019.122967
|
|
|
| [15] |
ZHOU X, KUANG D, ZHAO W, et al Lane-changing decision method based Nash Q-learning with considering the interaction of surrounding vehicles[J]. IET Intelligent Transport Systems, 2020, 14 (14): 2064- 2072
doi: 10.1049/iet-its.2020.0427
|
|
|
| [16] |
ALI Y, HAQUE M M, ZHENG Z An extreme value theory approach to estimate crash risk during mandatory lane-changing in a connected environment[J]. Analytic Methods in Accident Research, 2022, 33: 100193
doi: 10.1016/j.amar.2021.100193
|
|
|
| [17] |
ZHENG O. Developing a traffic safety diagnostics system for unmanned aerial vehicles using deep learning algorithms [D]. Orlando: University of Central Florida, 2019: 1–24.
|
|
|
| [18] |
马忠贵, 徐晓晗, 刘雪儿 因果推断三种分析框架及其应用综述[J]. 工程科学学报, 2022, 44 (7): 1231- 1243
MA Zhonggui, XU Xiaohan, LIU Xue’er Three analytical frameworks of causal inference and their applications[J]. Chinese Journal of Engineering, 2022, 44 (7): 1231- 1243
doi: 10.3321/j.issn.1001-053X.2022.7.bjkjdxxb202207013
|
|
|
| [19] |
刘礼, 吴飞, 李廉 因果关系学习的思维取向和概念分析[J]. 中国大学教学, 2021, (10): 35- 42
LIU Li, WU Fei, LI Lian Thinking orientation and conceptual analysis of causal relationship learning[J]. China University Teaching, 2021, (10): 35- 42
doi: 10.3969/j.issn.1005-0450.2021.10.007
|
|
|
| [20] |
ZHOU Z, ZHAO Y, LI M, et al A causal inference–based speed control framework for discretionary lane-changing processes[J]. Journal of Transportation Engineering, Part A: Systems, 2023, 149 (8): 1
|
|
|
| [21] |
梁礼明, 陈明理, 邓广宏, 等 分形理论下支持向量机核函数选择[J]. 科学技术与工程, 2019, 19 (13): 131- 138
LIANG Liming, CHEN Mingli, DENG Guanghong, et al Research on selection of kernel function of SVM under fractal theory[J]. Science Technology and Engineering, 2019, 19 (13): 131- 138
doi: 10.3969/j.issn.1671-1815.2019.13.021
|
|
|
| [22] |
葛泉波, 张建朝, 杨秦敏, 等 带有微分项改进的自适应梯度下降优化算法[J]. 控制理论与应用, 2022, 39 (4): 623- 632
GE Quanbo, ZHANG Jianchao, YANG Qinmin, et al Adaptive gradient descent optimization algorithm with improved differential terms[J]. Control Theory and Applications, 2022, 39 (4): 623- 632
doi: 10.7641/CTA.2021.10061
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|