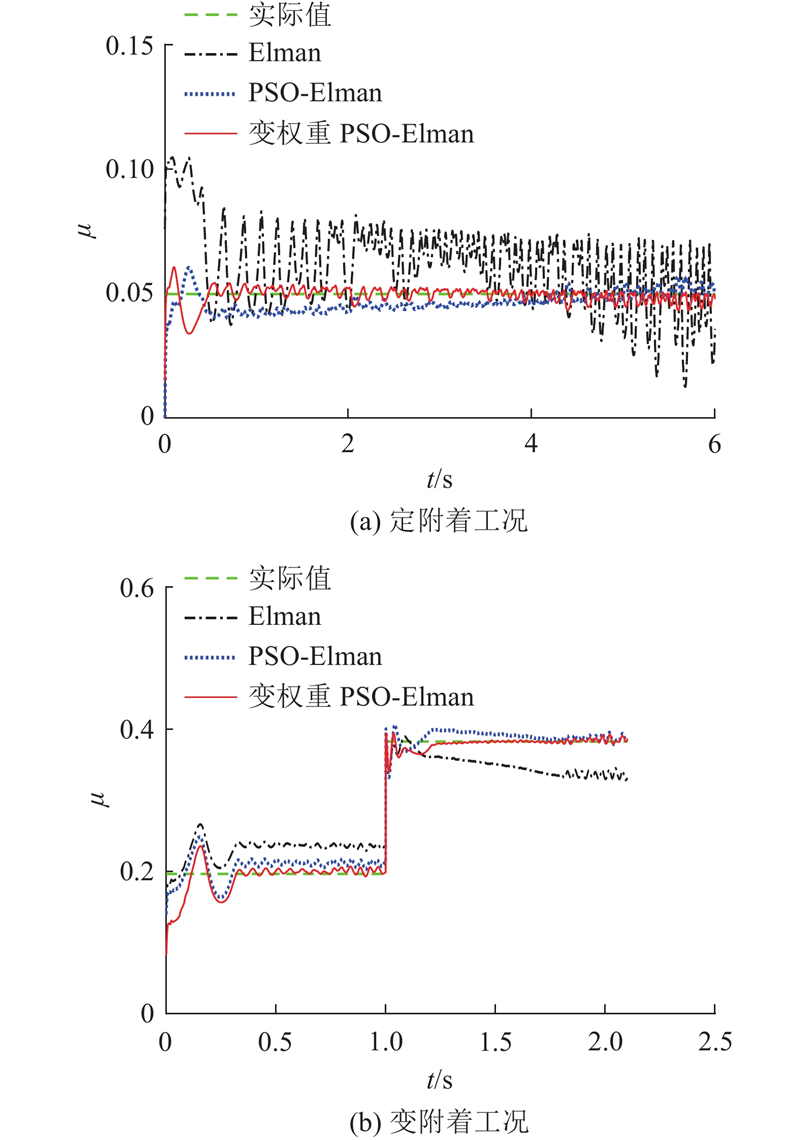
The variable weight particle swarm optimization (PSO)-Elman neural network was proposed for road adhesion coefficient estimation, in order to address the issue that the unstable weight update of traditional neural network leads to the poor accuracy in the estimation of road adhesion coefficient. The neural network model was constructed on the basis of a seven degrees-of-freedom vehicle dynamic model. The particle swarm algorithm was applied in the Elman neural network model to reduce the training absolute error. The linear decreasing weight strategy was used to change the weight of the particle swarm algorithm, which was useful for balancing the particle’s global and local search ability. Thus, the optimization of network weight arrays were realized. Then, the correlation curve of optimal slip ratio and rood adhesion coefficient was fitted by the Fourier approximation method. Theoretical analysis and simulation verification proved that this method can improve the estimation accuracy of road adhesion coefficient. Simulation results showed that, under both fixed and unfixed adhesion coefficient roads, the root-mean-square error of the road adhesion coefficient obtained by the proposed variable weight PSO-Elman neural network estimation method was reduced by 35.62% and 19.20% on average compared with that of the traditional Elman neural network. Furthermore, the anti-lock control effect was also effectively improved.
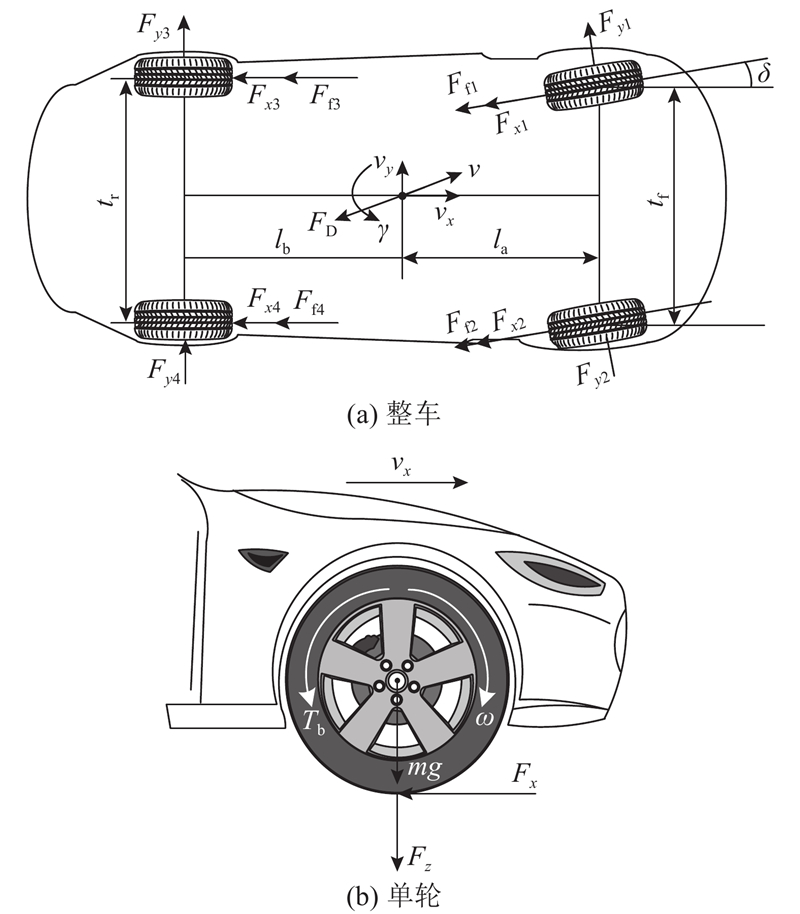
Fig.1Modeling of vehicle longitudinal dynamics and single wheel
参数
数值
参数
数值
m/kg
1 825
tf/m
1.535
hg/m
0.48
tr/m
1.531
Iz/(kg·m2)
1 600
$ {R_{{\text{ω }}}} $/m
0.29
la/m
1.26
lb/m
1.38
CD
0.3
A/m2
2
Cσ/N
68 900
Cα/(N·rad?1)
62 900
Tab.1Vehicle motion state parameters
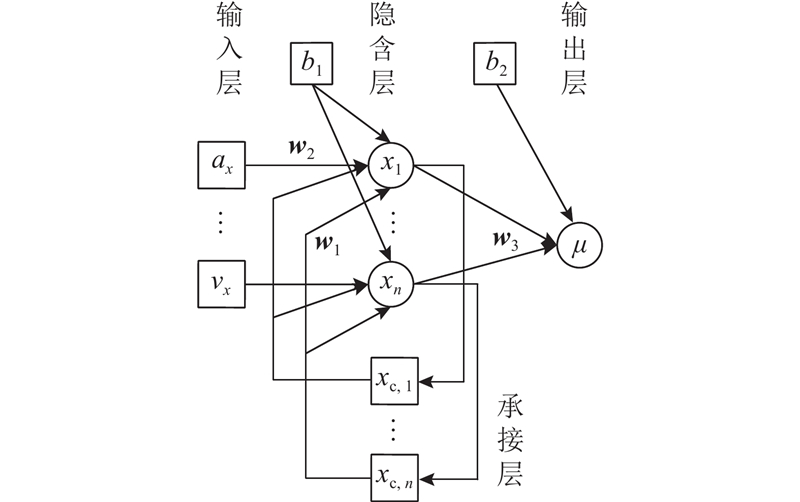
Fig.2Topology architecture of Elman neural network
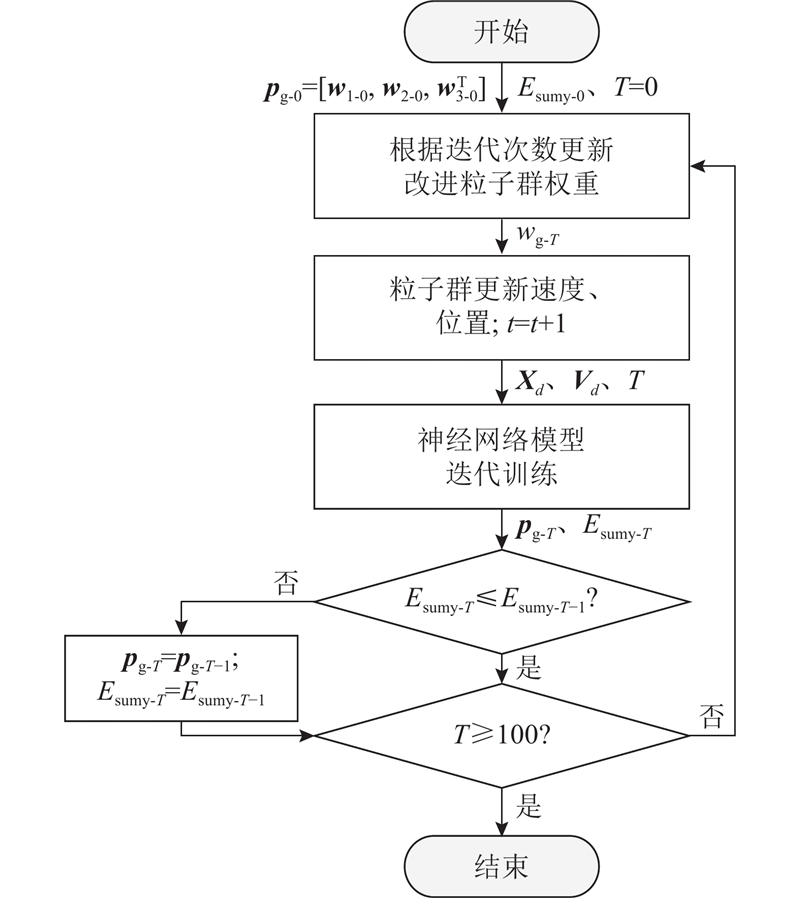
Fig.3Optimization flow chart of variable weight PSO weight arrays
Fig.4Estimation unit of ideal slip rate
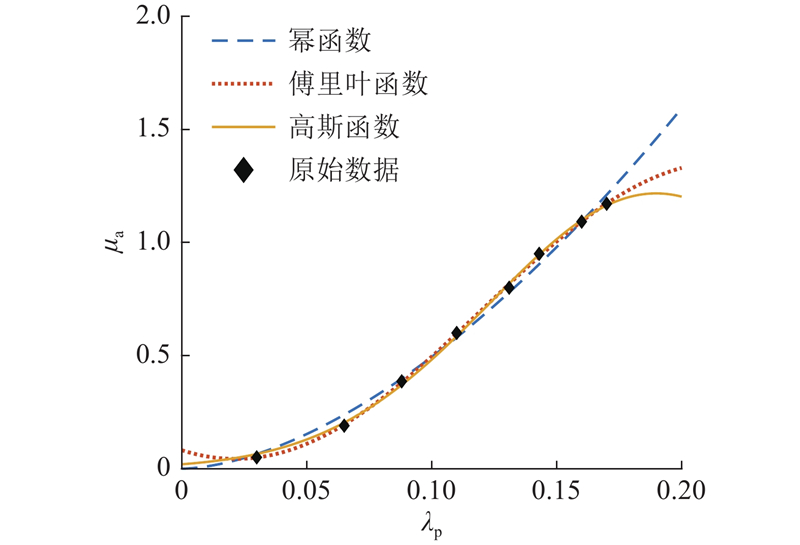
路面
c1
c2
c3
λp
μa
覆冰
0.05
306.39
0.01
0.02
0.05
覆雪
0.20
94.10
0.05
0.06
0.19
潮湿鹅卵石
0.40
33.72
0.10
0.14
0.39
重潮湿沥青
0.63
33.77
0.20
0.11
0.60
典型潮湿沥青
0.85
33.80
0.35
0.13
0.80
轻潮湿沥青
1.03
29.49
0.44
0.14
0.95
干水泥
1.20
25.17
0.54
0.16
1.09
干沥青
1.28
23.99
0.52
0.17
1.17
Tab.2Parameter values of typical road
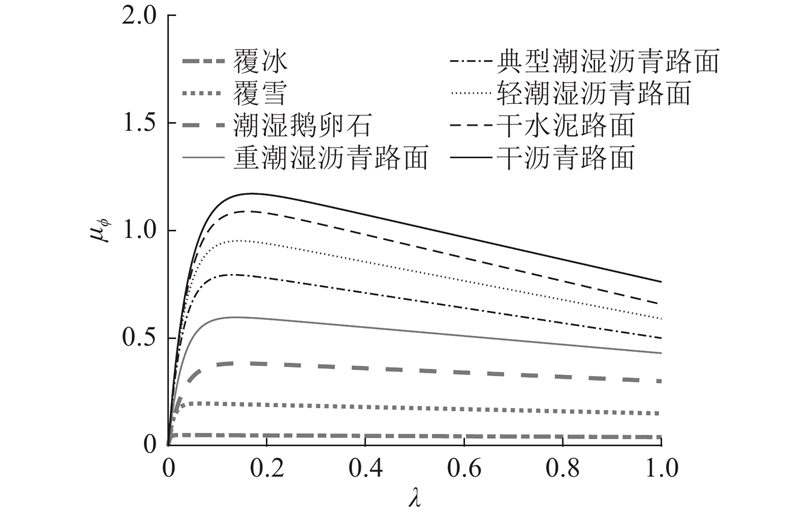
Fig.5Friction coefficient curve of typical tire-road
Fig.6Fitted curve of road adhesion coefficient and slip rate
n
$ {E_{{\text{rmse\_}}\mu }} $
n
$ {E_{{\text{rmse\_}}\mu }} $
4
0.0109
9
0.0112
5
0.0087
10
0.0100
6
0.0118
11
0.5401
7
0.0090
12
0.0249
8
0.0086
13
0.0090
Tab.3Trial calculation results of number of neurons in hidden layer or undertaking layer
工况
λp
μa
1
0.0497
0.0239
2
0.1963
0.0630
3
0.3825
0.1454
4
0.7940
0.1304
Tab.4Representative road parameters
Fig.7Curve of value of road adhesion coefficient over time under four types of road conditions
工况
Ermse-μ
p/%
工况
Ermse-μ
p/%
传统
变权重
传统
变权重
1
0.038 302
0.023 791
?37.89
3
0.131 380
0.091 050
?30.70
2
0.071 764
0.037 732
?47.42
4
0.356 060
0.261 800
?26.47
Tab.5Estimated root mean square error statistics of road adhesion coefficient
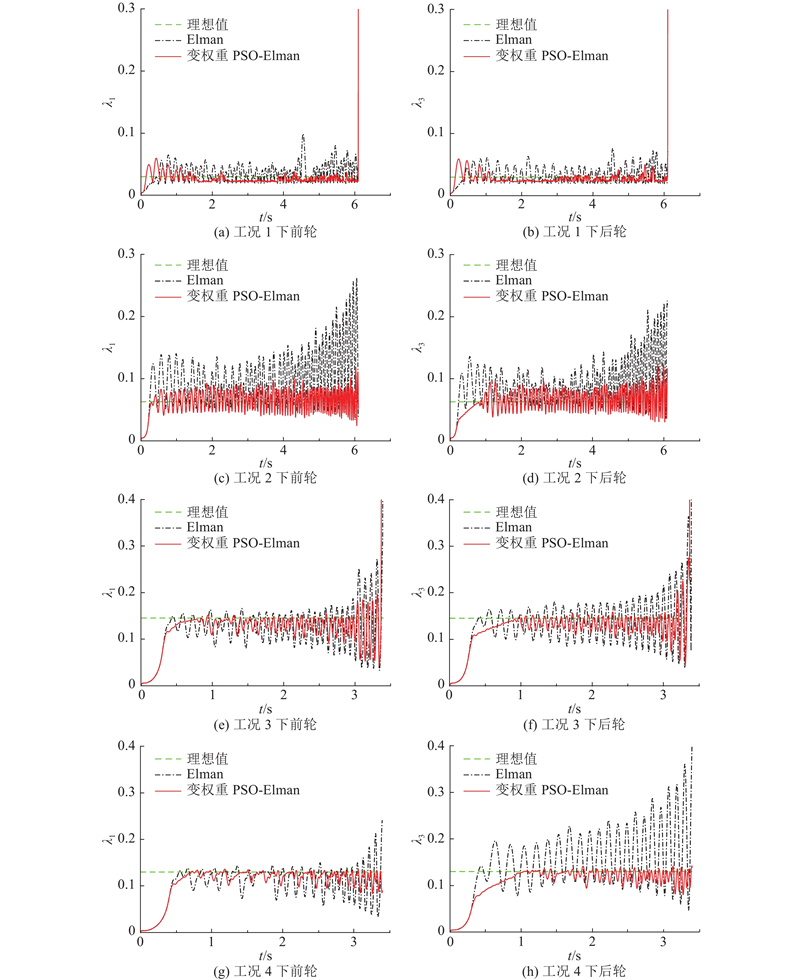
Fig.8Curve of wheel slip rate changing over time under four types of road conditions
工况
前轮
后轮
Emse_λ
q/%
Emse_λ
q/%
传统
变权重
传统
变权重
1
0.227 8
0.212 6
?6.66
0.227 7
0.212 6
?6.64
2
0.103 1
0.095 5
?7.41
0.103 2
0.095 7
?7.32
3
0.067 3
0.064 2
?4.83
0.069 0
0.064 7
?6.63
4
0.002 8
0.002 7
?3.50
0.004 0
0.003 2
?20.74
Tab.6Mean square error statistics of wheel slip rate
Fig.9Curve of value of road adhesion coefficient over time under condition 5
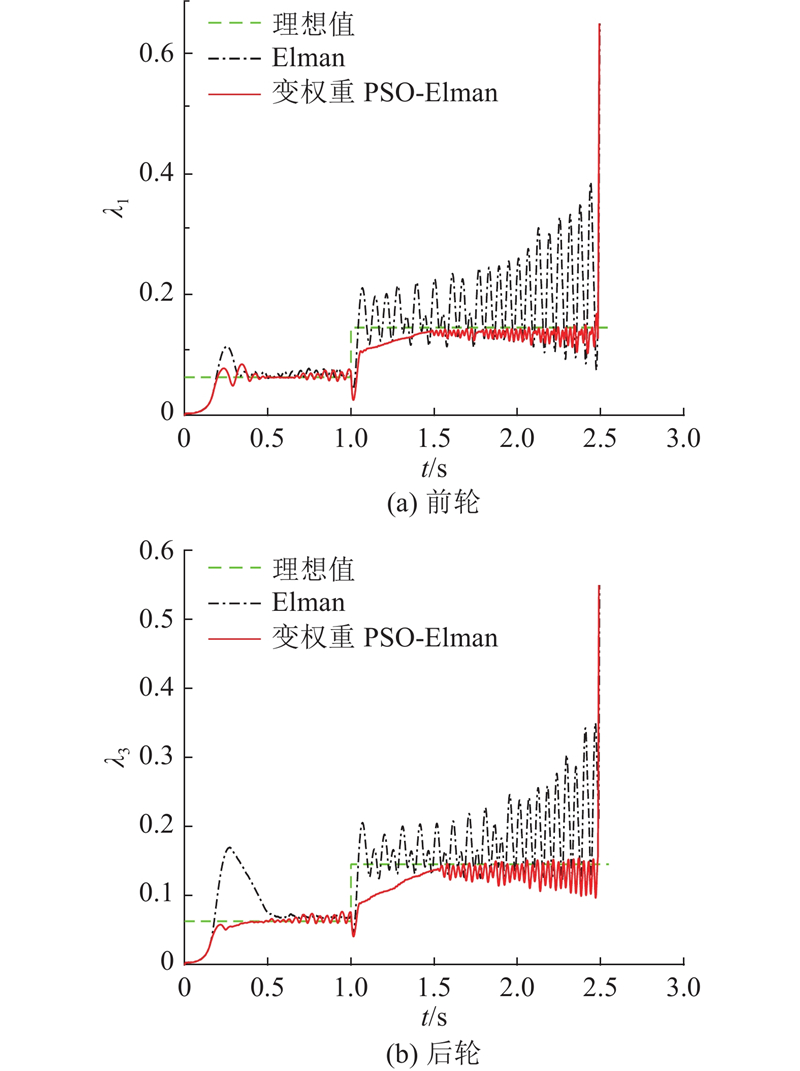
Fig.10Curve of wheel slip rate changing over time under condition 5
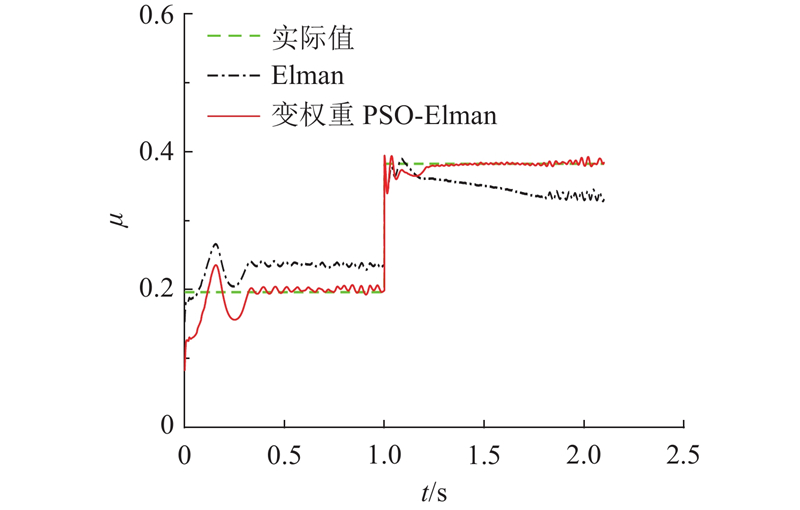
Fig.11Curve of predicted value of road adhesion coefficient over time under fixed-adhesion and changing-adhesion coefficient conditions
估计方法
Ermse_μ
p1/%
p2/%
p3/%
传统Elman
PSO-Elman
变权重PSO-Elman
定附着路面
0.016 080
0.010 914
0.007 576
?32.13
?52.89
?30.59
变附着路面
0.030 281
0.019 156
0.017 237
?36.70
?43.08
?10.02
Tab.7Root-mean-square error statistics of road adhesion coefficient in fixed and changing adhesion conditions
[1]
《中国公路学报》编辑部 中国汽车工程学术研究综述·2017[J]. 中国公路学报, 2017, 30 (6): 1- 197 Editorial Department of China Journal of Highway and Transport Review on China’s automotive engineering research progress: 2017[J]. China Journal of Highway and Transport, 2017, 30 (6): 1- 197
doi: 10.19721/j.cnki.1001-7372.2017.06.001
[2]
NGUYEN T, LECHNER B, WONG Y D Response-based methods to measure road surface irregularity: a state-of-the-art review[J]. European Transport Research Review, 2019, 11 (1): 1- 18
doi: 10.1186/s12544-018-0328-2
[3]
LEE H, TAHERI S Intelligent tires: a review of tire characterization literature[J]. IEEE Intelligent Transportation Systems Magazine, 2017, 9 (2): 114- 135
doi: 10.1109/MITS.2017.2666584
[4]
ZHANG D, ZOU Q, LIN H, et al Automatic pavement defect detection using 3D laser profiling technology[J]. Automation in Construction, 2018, 96: 350- 365
doi: 10.1016/j.autcon.2018.09.019
[5]
GARCIA-POZUELO D, OLATUNBOSUN O, YUNTA J, et al A novel strain-based method to estimate tire conditions using fuzzy logic for intelligent tires[J]. Sensors, 2017, 17 (2): 350
doi: 10.3390/s17020350
[6]
REINA G, LEANZA A, MESSINA A Terrain estimation via vehicle vibration measurement and cubature Kalman filtering[J]. Journal of Vibration and Control, 2020, 26 (11/12): 885- 898
[7]
WANG Y, HU J Y, WANG F A, et al Tire road friction coefficient estimation: review and research perspectives[J]. Chinese Journal of Mechanical Engineering, 2022, 35 (1): 1- 11
doi: 10.1186/s10033-021-00666-0
[8]
RATH J J, VELUVOLU K C, DEFOORT M Simultaneous estimation of road profile and tire road friction for automotive vehicle[J]. IEEE Transactions on Vehicular Technology, 2014, 64 (10): 4461- 4471
[9]
李韶华, 王桂洋, 杨泽坤, 等 基于DRBF-EKF算法的车辆质心侧偏角与路面附着系数动态联合估计[J]. 力学学报, 2022, 54 (7): 1853- 1865 LI Shaohua, WANG Guiyang, YANG Zekun, et al Dynamic joint estimation of vehicle sideslip angle and road adhesion coefficient based on DRBF-EKF algorithm[J]. Chinese Journal of Theoretical and Applied Mechanics, 2022, 54 (7): 1853- 1865
[10]
QI G X, FAN X B, LI H A comparative study of the recursive least squares and fuzzy logic estimation methods for the measurement of road adhesion coefficient[J]. Australian Journal of Mechanical Engineering, 2023, 21 (4): 1230- 1246
doi: 10.1080/14484846.2021.1967839
[11]
PARK J, MIN K, KIM H, et al Road surface classification using a deep ensemble network with sensor feature selection[J]. Sensors, 2018, 18 (12): 4342
doi: 10.3390/s18124342
[12]
SUN Z Y, HAO X L, LI W, et al Asphalt pavement friction coefficient prediction method based on genetic-algorithm-improved neural network (GAI-NN) model[J]. Canadian Journal of Civil Engineering, 2022, 49 (1): 109- 120
doi: 10.1139/cjce-2020-0051
[13]
林棻, 王少博, 赵又群, 等 基于改进 Keras 模型的路面附着系数估计[J]. 机械工程学报, 2021, 57 (12): 74- 86 LIN Fen, WANG Shaobo, ZHAO Youqun, et al Road friction coefficient estimation based on improved Keras model[J]. Journal of Mechanical Engineering, 2021, 57 (12): 74- 86
doi: 10.3901/JME.2021.12.074
[14]
ŠABANOVIč E, ŽURAULIS V, PRENTKOVSKIS O, et al Identification of road-surface type using deep neural networks for friction coefficient estimation[J]. Sensors, 2020, 20 (3): 612
doi: 10.3390/s20030612
[15]
伍文广, 张凡皓, 徐孟龙 基于 Elman 神经网络的路面附着系数识别[J]. 重庆大学学报, 2023, 46 (3): 118- 128 WU Wenguang, ZHANG Fanhao, XU Menglong Identification of road friction coefficient based on Elman neural network[J]. Journal of Chongqing University, 2023, 46 (3): 118- 128
[16]
MALHOTRA R, SINGH P. Recent advances in deep learning models: a systematic literature review [J]. Multimedia Tools and Applications , 2023: 1-84.
[17]
金智林, 严正华 基于二次预测型横向载荷转移率的汽车侧翻预警研究[J]. 中国机械工程, 2019, 30 (15): 1790- 1795 JIN Zhilin, YAN Zhenghua Research on vehicle rollover warning based on secondary predictive lateral load transfer ratio[J]. China Mechanical Engineering, 2019, 30 (15): 1790- 1795
[18]
PEEIE M H B, OGINO H, OSHINOYA Y Skid control of a small electric vehicle with two in-wheel motors: simulation model of ABS and regenerative brake control[J]. International Journal of Crashworthiness, 2016, 21 (5): 396- 406
doi: 10.1080/13588265.2016.1147731
[19]
YOU S, GIL J, KIM W Fixed-time slip control with extended-state observer using only wheel speed for anti-lock braking systems of electric vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23 (7): 6368- 6378
[20]
宋涛. 轮毂驱动电动车的路面附着系数估计方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2017. SONG Tao. Road friction coefficient estimation of in-wheel-motor electric vehicle [D]. Harbin: Harbin Institute of Technology, 2017.
[21]
AB AZIZ M F, MOSTAFA S A, FOOZY C F M, et al Integrating Elman recurrent neural network with particle swarm optimization algorithms for an improved hybrid training of multidisciplinary datasets[J]. Expert Systems with Applications, 2021, 183: 115441
doi: 10.1016/j.eswa.2021.115441
[22]
JARI A, AVOKH A PSO-based sink placement and load-balanced anycast routing in multi-sink WSNs considering compressive sensing theory[J]. Engineering Applications of Artificial Intelligence, 2021, 100: 104164
doi: 10.1016/j.engappai.2021.104164
YANG Y, TANG Q S, BOLIN L, et al Dynamic coordinated control for regenerative braking system and anti-lock braking system for electrified vehicles under emergency braking conditions[J]. IEEE Access, 2020, 8: 172664- 172677
doi: 10.1109/ACCESS.2020.3024918
[25]
戚尔鹏, 叶鹰 漂移幂函数的数值拟合与理论分析[J]. 情报学报, 2016, 35 (12): 1285- 1295 QI Erpeng, YE Ying Data fitting and theoretical analysis of the shifted power function[J]. Journal of the China Society for Scientific and Technical Information, 2016, 35 (12): 1285- 1295
[26]
GUO H A simple algorithm for fitting a Gaussian function [DSP tips and tricks][J]. IEEE Signal Processing Magazine, 2011, 28 (5): 134- 137
doi: 10.1109/MSP.2011.941846
[27]
SUN T J, GAO Z H, GAO F, et al Intelligent vehicle automatic stop-and-go task based on humanized learning control model[J]. Advances in Civil Engineering, 2021, 2021: 1- 11
[28]
PANCHAL G, GANATRA A, KOSTA Y P, et al Behaviour analysis of multilayer perceptrons with multiple hidden neurons and hidden layers[J]. International Journal of Computer Theory and Engineering, 2011, 3 (2): 332- 337