|
|
|
| Time-optimal trajectory planning of manipulator based on multi-group competition squirrel search algorithm |
Ye-he ZHAO1,2( ),Da-xin LIU1,2,Zhen-yu LIU1,2,*(),Jian-rong TAN1,2 ),Da-xin LIU1,2,Zhen-yu LIU1,2,*(),Jian-rong TAN1,2 |
1. State Key Laboratory of CAD & CG, Zhejiang University, Hangzhou 310027, China
2. Engineering Research Center for Design Engineering and Digital Twin of Zhejiang Province, Hangzhou 310027, China |
|
|
|
Abstract Aiming at the problems of low optimization efficiency, poor global and stability of optimization results in the application of traditional intelligent optimization algorithms to time-optimal trajectory planning of manipulator in the joint space, a new time-optimal trajectory planning method for manipulator was proposed. The position constraints were considered when the time-optimal trajectory planning model in the joint space of the manipulator was established. According to the input joint point sequence, an S-shaped curve was used to estimate the time interval, and all the individuals in the algorithm were generated to perform multi-group competition iterations. After that, the time-optimal solution of trajectory planning of manipulator in the joint space was obtained. Results of simulation comparison experiments with different algorithms show that the proposed method has higher optimization efficiency and better global optimization than the traditional optimization algorithms. Also, the proposed method has good stability. The variance of its multiple optimization results can be 3 orders of magnitude lower than that of the single population algorithm.
|
|
Received: 19 January 2022
Published: 03 January 2023
|
|
|
| Fund: 国家重点研发计划资助项目(2019YFB1312600);浙江省重点研发计划资助项目(2021C01008) |
|
Corresponding Authors:
Zhen-yu LIU
E-mail: zhaoyehe@zju.edu.cn;liuzy@zju.edu.cn
|
基于多种群竞争松鼠搜索算法的机械臂时间最优轨迹规划
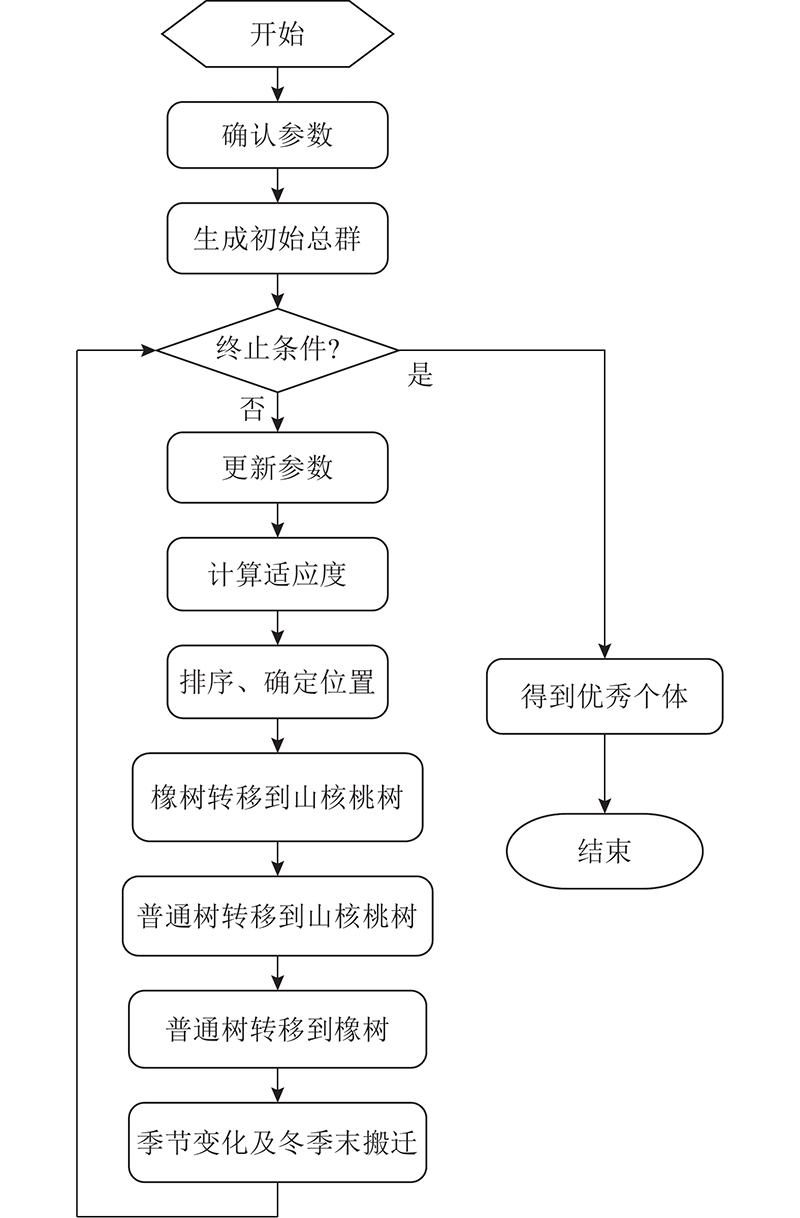
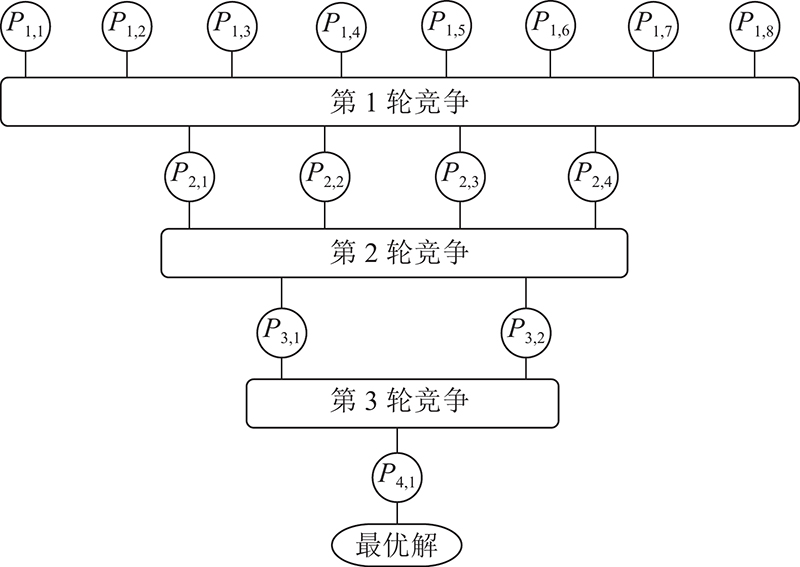
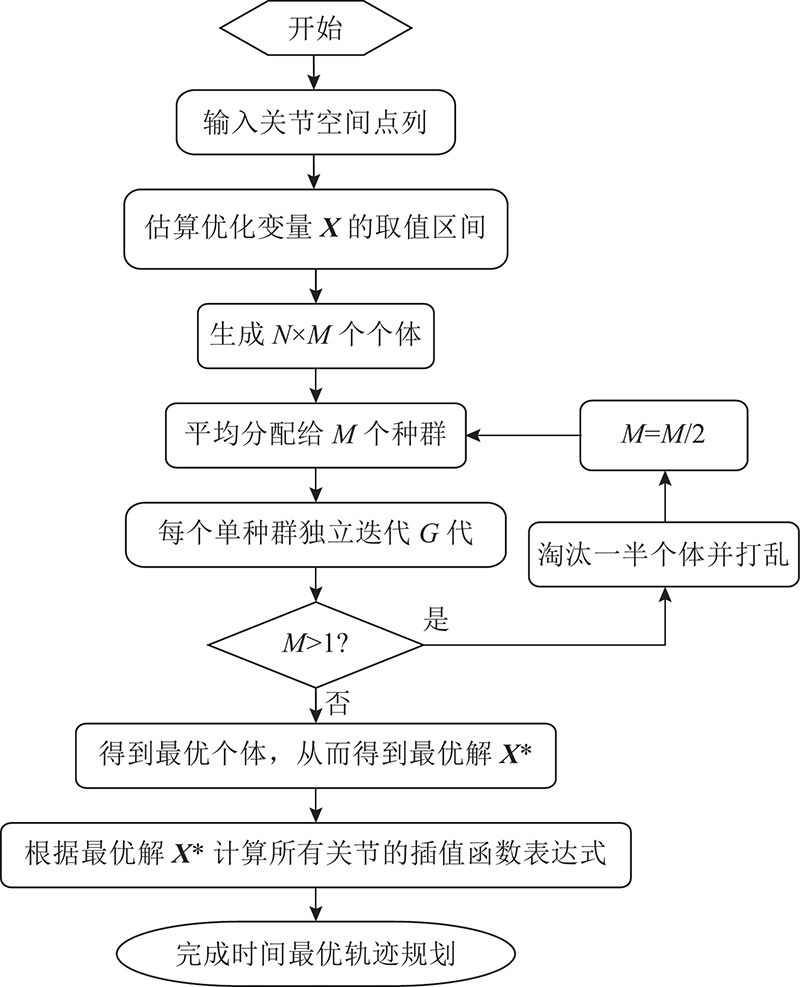
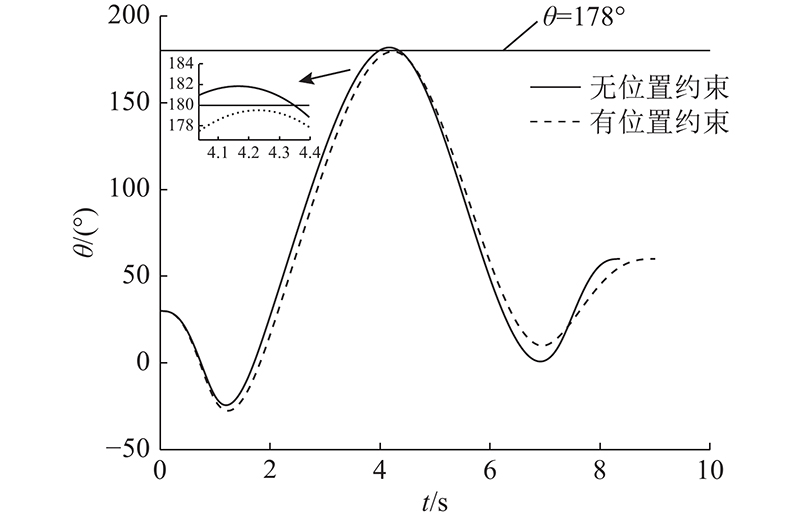
针对传统智能优化算法在机械臂关节空间进行时间最优轨迹规划应用中存在的寻优效率低、优化结果全局性和稳定性差的问题,提出新的机械臂时间最优轨迹规划方法. 在建立机械臂关节空间内的时间最优轨迹规划模型时考虑位置约束,根据输入的关节点列,使用S形曲线估算时间的取值区间,对生成算法的所有个体进行多种群竞争迭代,得出机械臂关节空间轨迹规划的时间最优解. 与不同算法的仿真对比试验结果表明,所提方法较传统的优化算法具有更高的寻优效率和更好的优化全局性;所提方法的稳定性好,其多次优化结果的方差相较单种群算法低3个数量级.
关键词:
关节空间,
轨迹规划,
松鼠搜索算法,
多项式插值,
机械臂
|
|
| [1] |
约翰 J. 克雷格. 机器人学导论(原书第4版)[M]. 贠超, 王伟, 译. 北京: 机械工业出版社, 2018: 144-161.
|
|
|
| [2] |
居鹤华, 付荣 基于GA的时间最优机械臂轨迹规划算法[J]. 控制工程, 2012, 19 (3): 472- 477
JU He-hua, FU Rong Time-optimal trajectory planning algorithm based on GA for manipulator[J]. Control Engineering of China, 2012, 19 (3): 472- 477
doi: 10.3969/j.issn.1671-7848.2012.03.026
|
|
|
| [3] |
LIU C, CAO G H, QU Y Y, et al An improved PSO algorithm for time-optimal trajectory planning of Delta robot in intelligent packaging[J]. The International Journal of Advanced Manufacturing Technology, 2020, 107: 1091- 1099
doi: 10.1007/s00170-019-04421-7
|
|
|
| [4] |
HUANG P F, XU Y S. PSO-based time-optimal trajectory planning for space robot with dynamic constraints [C]// 2006 IEEE International Conference on Robotics and Biomimetics. Kunming: IEEE, 2006: 1402-1407.
|
|
|
| [5] |
GASPARETTO A, ZANOTTO V Optimal trajectory planning for industrial robots[J]. Advances in Engineering Software, 2010, 41 (4): 548- 556
doi: 10.1016/j.advengsoft.2009.11.001
|
|
|
| [6] |
朱世强, 刘松国, 王宣银, 等 机械手时间最优脉动连续轨迹规划算法[J]. 机械工程学报, 2010, 46 (3): 47- 52
ZHU Shi-qiang, LIU Song-guo, WANG Xuan-yin, et al Time-optimal and jerk-continuous trajectory planning algorithm for manipulators[J]. Journal of Mechanical Engineering, 2010, 46 (3): 47- 52
doi: 10.3901/JME.2010.03.047
|
|
|
| [7] |
殷凤健, 梁庆华, 程旭, 等 基于时间最优的机械臂关节空间轨迹规划算法[J]. 机械设计与研究, 2017, 33 (5): 12- 15
YIN Feng-jian, LIANG Qing-hua, CHENG Xu, et al Research on mechanical arm joint space trajectory planning algorithm based on optimal time[J]. Machine Design and Research, 2017, 33 (5): 12- 15
doi: 10.13952/j.cnki.jofmdr.2017.0183
|
|
|
| [8] |
汪婷, 罗欣 一种六轴机械臂时间最优轨迹规划方法[J]. 工业控制计算机, 2021, 34 (4): 66- 69
WANG Ting, LUO Xin A time-optimal trajectory planning method for manipulators[J]. Industrial Control Computer, 2021, 34 (4): 66- 69
doi: 10.3969/j.issn.1001-182X.2021.04.027
|
|
|
| [9] |
ZHAO J, ZHU X J, SONG T J Serial manipulator time-jerk optimal trajectory planning based on hybrid IWOA-PSO algorithm[J]. IEEE Access, 2022, 10: 6592- 6604
doi: 10.1109/ACCESS.2022.3141448
|
|
|
| [10] |
ZHANG L H, WANG Y, ZHAO X Y, et al Time-optimal trajectory planning of serial manipulator based on adaptive cuckoo search algorithm[J]. Journal of Mechanical Science and Technology, 2021, 35: 3171- 3181
doi: 10.1007/s12206-021-0638-5
|
|
|
| [11] |
XIDIAS E K Time-optimal trajectory planning for hyper-redundant manipulators in 3D workspaces[J]. Robotics and Computer-Integrated Manufacturing, 2018, 50: 286- 298
doi: 10.1016/j.rcim.2017.10.005
|
|
|
| [12] |
YU X L, DONG M S, YIN W M Time-optimal trajectory planning of manipulator with simultaneously searching the optimal path[J]. Computer Communications, 2022, 181: 446- 453
doi: 10.1016/j.comcom.2021.10.005
|
|
|
| [13] |
ZHANG T, ZHANG M H, ZOU Y B Time-optimal and smooth trajectory planning for robot manipulators[J]. International Journal of Control, Automation and Systems, 2021, 19: 521- 531
doi: 10.1007/s12555-019-0703-3
|
|
|
| [14] |
MA J W, GAO S, YAN H T, et al A new approach to time-optimal trajectory planning with torque and jerk limits for robot[J]. Robotics and Autonomous Systems, 2021, 140: 103744
doi: 10.1016/j.robot.2021.103744
|
|
|
| [15] |
PALLESCHI A, HAMAD M, ABDOLSHAH S, et al Fast and safe trajectory planning: solving the Cobot performance/safety trade-off in human-robot shared environments[J]. IEEE Robotics and Automation Letters, 2021, 6 (3): 5445- 5452
doi: 10.1109/LRA.2021.3076968
|
|
|
| [16] |
GAO M Y, DING P, YANG Y X. Time-optimal trajectory planning of industrial robots based on particle swarm optimization [C]// 2015 Fifth International Conference on Instrumentation and Measurement, Computer, Communication and Control (IMCCC). Qinhuangdao: IEEE, 2015: 1934-1939.
|
|
|
| [17] |
石川, 赵彤, 叶佩青, 等 数控系统S曲线加减速规划研究[J]. 中国机械工程, 2007, (12): 1421- 1425
SHI Chuan, ZHAO Tong, YE Pei-qing, et al Study on S-shape curve acceleration and deceleration control on NC system[J]. China Mechanical Engineering, 2007, (12): 1421- 1425
doi: 10.3321/j.issn:1004-132X.2007.12.009
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|