1. School of Mechanical Engineering, Zhejiang University, Hangzhou 310027, China 2. Hangzhou Jingye Intelligent Technology Limited Company, Hangzhou 310051, China 3. China Nuclear Power Engineering Limited Company, Beijing 100840, China
A new type of design scheme of a gearing chain-based manipulator was proposed, aiming at the existing problems of complex coupling relationship, exposed transmission parts, and low flexibility and low repeat positioning accuracy of the gearing chain-based manipulators. The scheme decoupled the kinematic relationship and simplified the two strongly correlated coupling relationships between the gear sets into one. Based on the simplification of the coupling logic relationship and the optimization of the structure, the design concepts of fully sealed joints and infinite rotation were realized. Then, the control algorithm for the gearing chain-based manipulator was derived through the combination of the kinematics analytical solution formula derivation and the analysis results of gear chain transmission logic coupling of the manipulator. Based on the coupling control algorithm, the motion space was analyzed and the control program of the manipulator was written to realize the flexibility verification and automatic control functions. Besides, test verification was carried out on the test system of the manipulator. Simulation analysis and experimental research result show that the coupling principle, structural design and control algorithm of the new manipulator are feasible and meet the needs of automation applications of manipulators in complex radioactive environments.
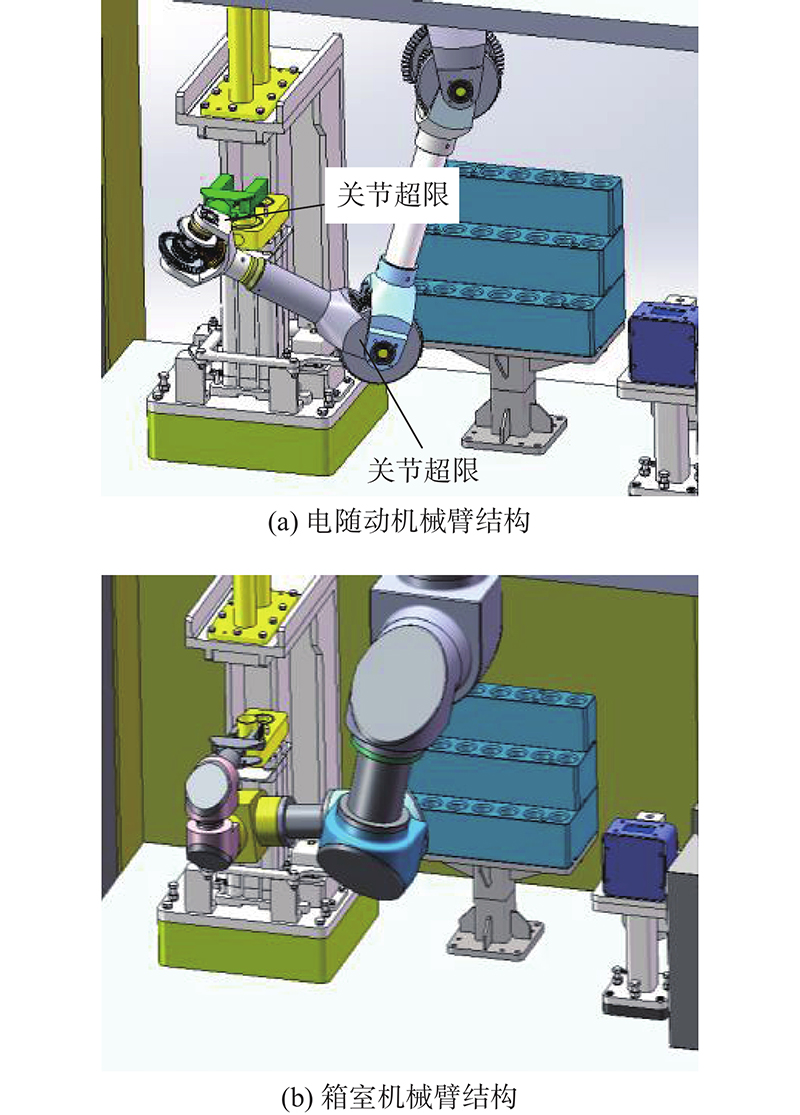
Fig.1Comparison of structure characteristics of two manipulators
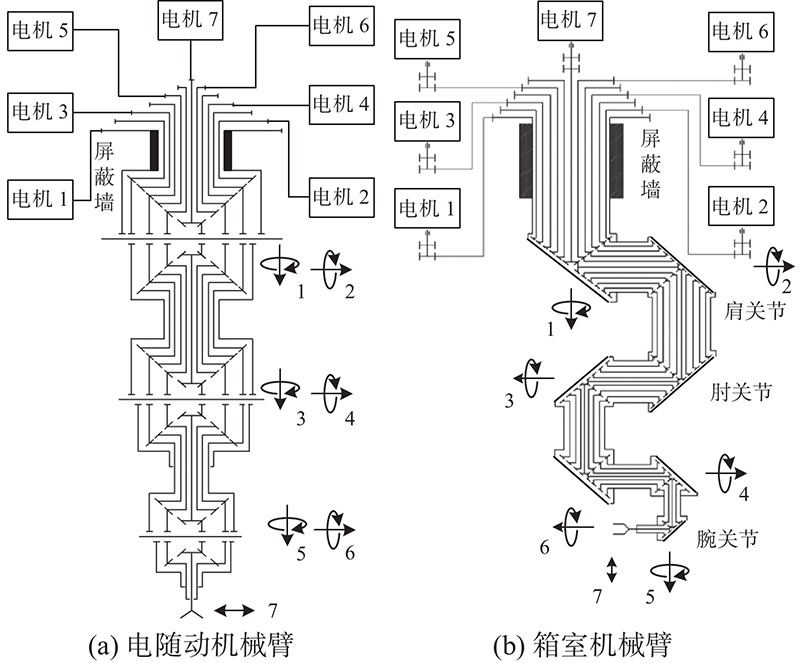
Fig.2Comparison of transmission principle of manipulators
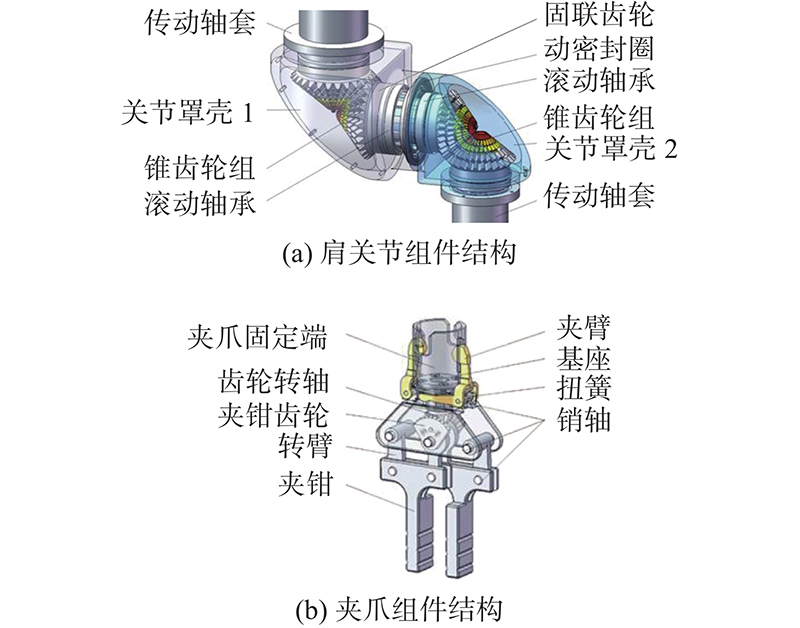
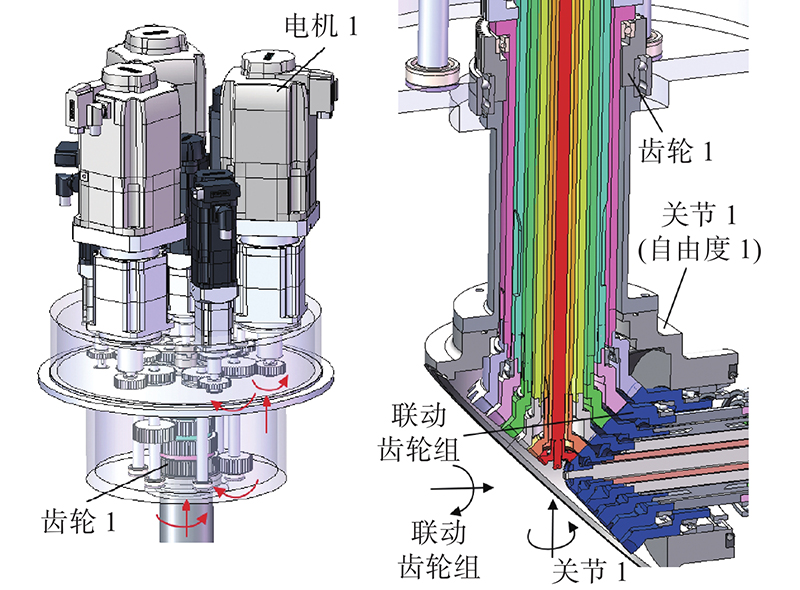
Fig.3External integrated power assembly of manipulator for hot cell
Fig.4Motion transmission structure of manipulator for hot cell
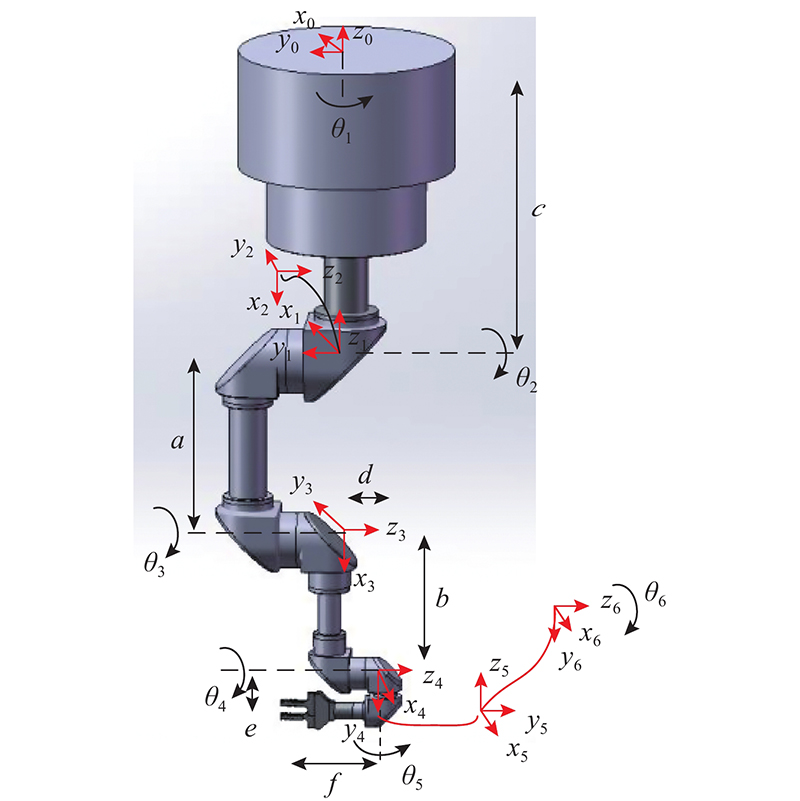
Fig.5Linkage coordinate system of manipulator for hot cell
i
αi?1/(°)
ai?1/mm
di/mm
θi/(°)
1
0
0
?c
θ1
2
90
0
0
θ2?90
3
0
a
0
θ3
4
0
b
d
θ4?90
5
90
0
?e
θ5
6
?90
0
?f
θ6
Tab.1D-H parameter table of manipulator for hot cell
Fig.6Motion coupling compensation principle of manipulator for hot cell
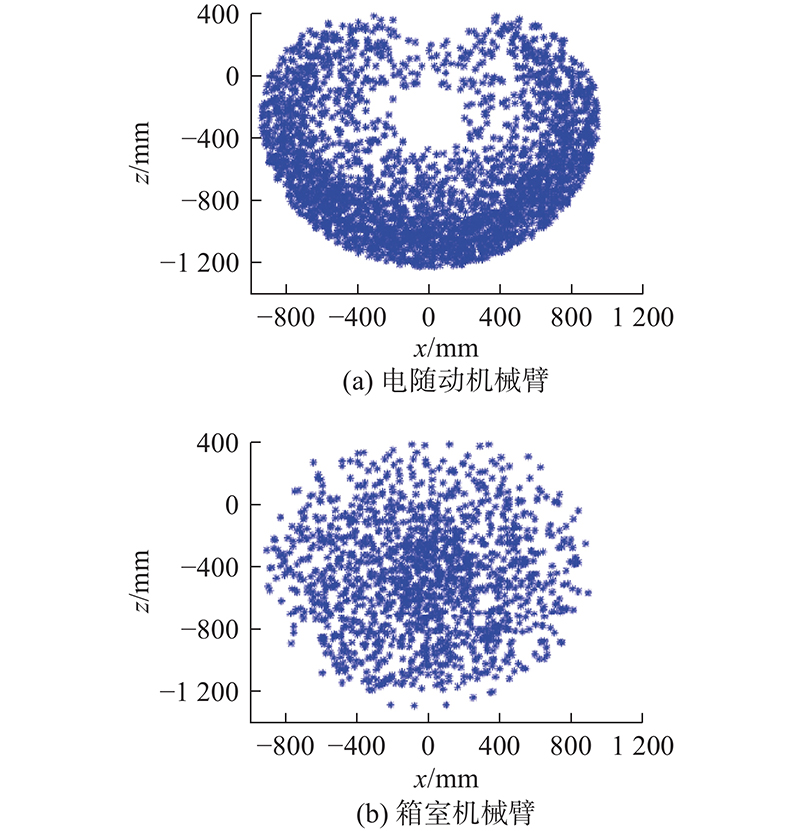
Fig.7Contrastive reachable workspace sections of two manipulators
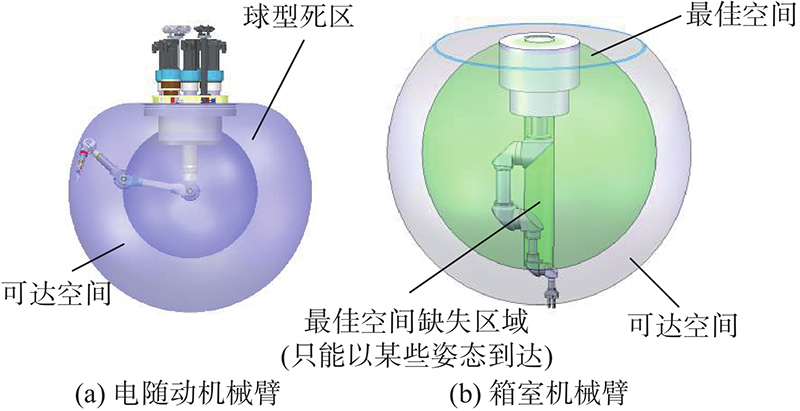
Fig.83D reachable workspace contrast of two manipulators
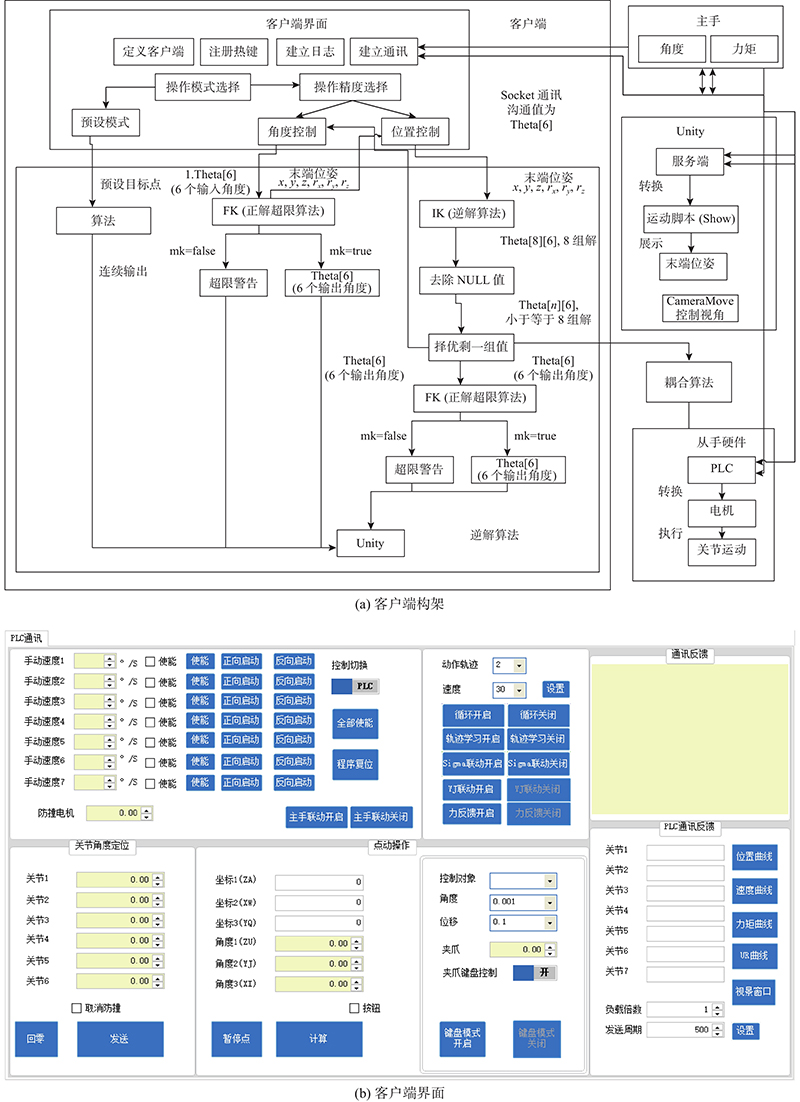
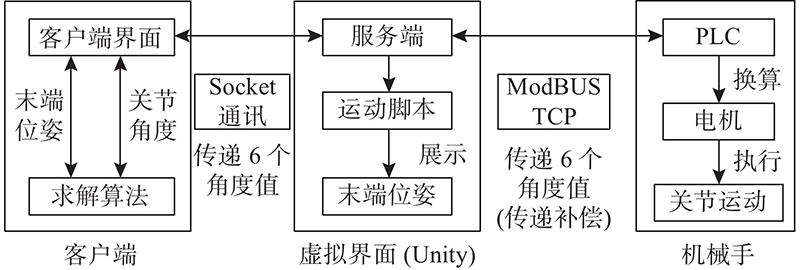
Fig.10Client architecture and interface of manipulator for hot cell
Fig.9Control architecture diagram of manipulator for hot cell
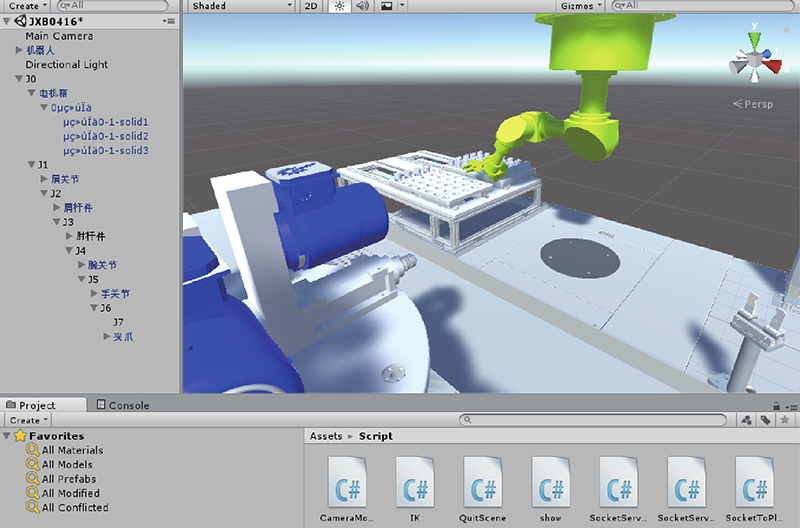
Fig.11Virtual interface of manipulator for hot cell
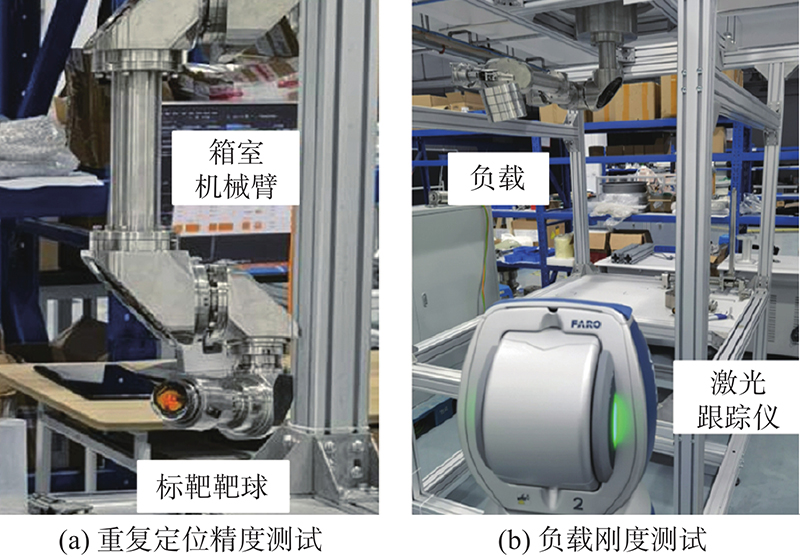
Fig.12Key indicators test of manipulator for hot cell
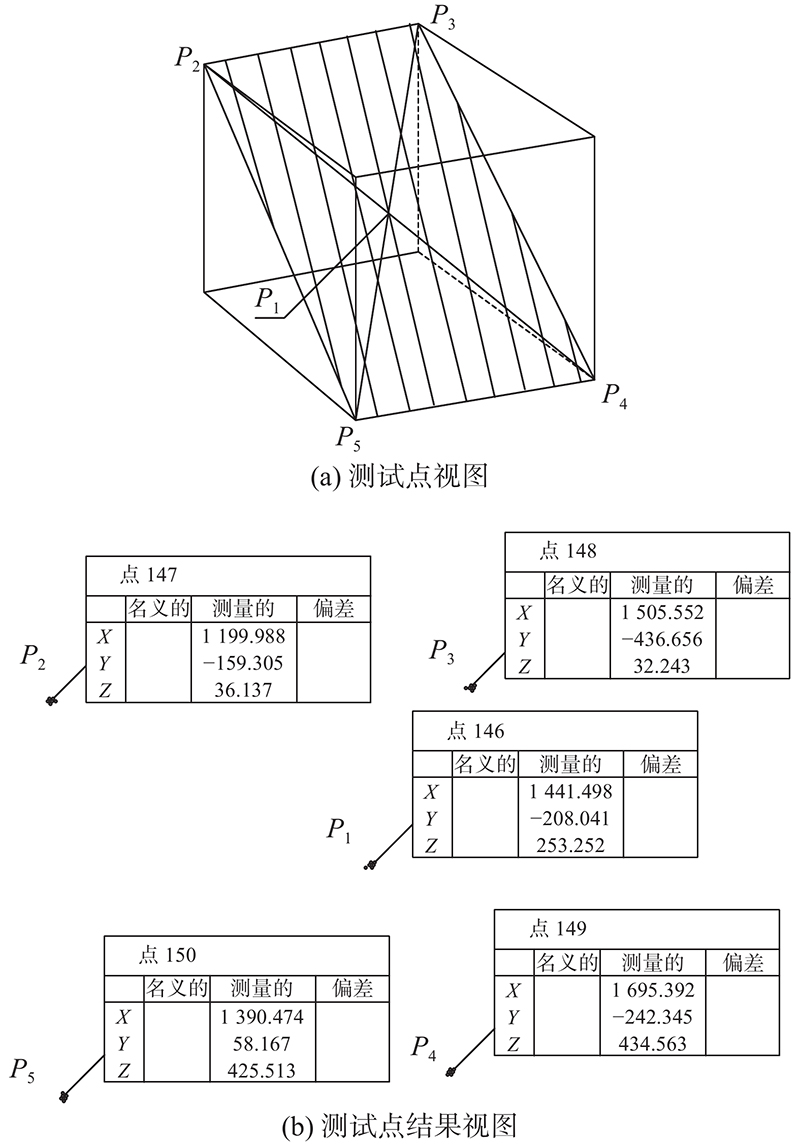
Fig.13Test methods and results of position accuracy
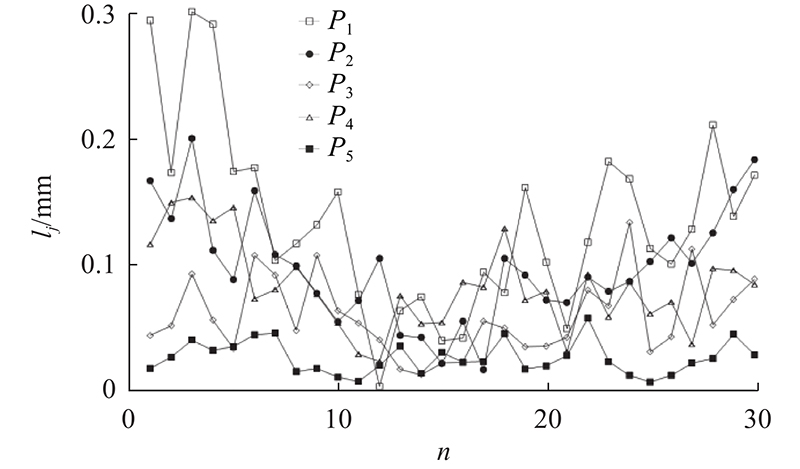
Fig.14Deviation of each test point from mean spatial position
[1]
SCHNEIDER M, FROGGATT A, HAZEMANN J, et al. The world nuclear industry status report 2017 [R]. Paris: Mycle Schneider Consulting, 2017.
[2]
瓮松峰 压水堆核电站乏燃料运输辅助设备设计[J]. 核动力工程, 2012, 33 (6): 147- 150 WENG Song-feng Design of the ancillary equipment for spent fuel transport of PWR nuclear power plant[J]. Nuclear Power Engineering, 2012, 33 (6): 147- 150
doi: 10.3969/j.issn.0258-0926.2012.06.033
[3]
李想, 张宏韬 乏燃料后处理产业的市场前景及发展路径[J]. 南方能源建设, 2017, 4 (3): 35- 38 LI Xiang, ZHANG Hong-tao Market prospect and development path for the industry of spent fuel recycle management[J]. Southern Energy Construction, 2017, 4 (3): 35- 38
[4]
辛露, 陈凯 核工业机器人系统中辐照加固技术研究[J]. 科技视界, 2019, 3: 8- 12 XIN Lu, CHEN Kai Research on radiation reinforcement technology in nuclear industry robot system[J]. Science and Technology Vision, 2019, 3: 8- 12
[5]
高松海. 遥控机器人[M]. 北京: 原子能出版社, 1981: 17-30.
[6]
MEASSON Y, DAVID O, LOUVEAU F, et al Technology and control for hydraulic manipulators[J]. Fusion Engineering and Design, 2003, 69 (1–4): 129- 134
doi: 10.1016/S0920-3796(03)00280-1
[7]
GEFFARD F, GARREC P, PIOLAIN G, et al TAO2000 V2 computer-assisted force feedback telemanipulators used as maintenance and production tools at the AREVA NC-La Hague fuel recycling plant[J]. Journal of Field Robotics, 2012, 29 (1): 161- 174
doi: 10.1002/rob.20426
[8]
LEE J K, LEE H J, PARK B S, et al Bridge-transported bilateral master-slave servo manipulator system for remote manipulation in spent nuclear fuel processing plant[J]. Journal of Field Robotics, 2012, 29 (1): 138- 160
doi: 10.1002/rob.20419
[9]
LEE J K, PARK B S, YU S N, et al Crane system with remote actuation mechanism for use in argon compartment in ACPF hot cell[J]. Nuclear Engineering and Design, 2016, 307: 144- 154
doi: 10.1016/j.nucengdes.2016.07.011
[10]
RAY D D, MISHRA J K, SAKRIKAR R V, et al. An evolution of remote handling technology for the Indian nuclear research and industry scenario [C]// International Conference on Advancements in Automation, Robotics and Sensing. Singapore: Springer, 2016: 11-20.
[11]
李贵生, 唐辉, 符勰, 等 中试厂俄罗斯三关节机械手的调试与应用[J]. 研究危害的线性无阈(LNT)模型及目前对模型的评价, 2011, 2: 50- 56 LI Gui-sheng, TANG Hui, FU Xie, et al Debugging and application of russian three-joint manipulator in the pilot plant[J]. Progress Report on China Nuclear Science and Technology, 2011, 2: 50- 56
[12]
张国伟, 李斌, 陈丽惠, 等. 核工业电随动主从机械手控制系统研制[J]. 仪器仪表学报, 2010, 31(8): 245-249. ZHANG Guo-wei, LI Bin, CHEN Li-hui, et al. Control system of master-slave electric manipulator for nuclear industry[J]. Chinese Journal of Scientific Instrument. 2010, 31(8): 245-249.
[13]
张显鹏, 江常玉 国产主从式机械手电动部分改为遥控的设计[J]. 核动力工程, 2016, 37 (增1): 12- 13 ZHANG Xian-peng, JIANG Chang-yu Design of remote control to replace electric parts of master-slave manipulator[J]. Nuclear Power Engineering, 2016, 37 (增1): 12- 13
[14]
丁渊明, 王宣银 串联机械臂结构优化方法[J]. 浙江大学学报: 工学版, 2010, 44 (12): 2360- 2364 DING Yuan-ming, WANG Xuan-yin Optimization method of serial manipulator structure[J]. Journal of Zhejiang University: Engineering Science, 2010, 44 (12): 2360- 2364