|
|
|
| 融合动态风险图与多变量注意力机制的车辆轨迹预测模型 |
陈文强1( ),冯琳越2,王东丹2,顾玉磊3,*(),赵轩3 ),冯琳越2,王东丹2,顾玉磊3,*(),赵轩3 |
1. 长安大学 未来交通学院,陕西 西安 710064
2. 长安大学 运输工程学院,陕西 西安 710064
3. 长安大学 汽车学院,陕西 西安 710064 |
|
| Vehicle trajectory prediction model integrating dynamic risk map and multivariate attention mechanism |
| Wenqiang CHEN1(),Linyue FENG2,Dongdan WANG2,Yulei GU3,*(),Xuan ZHAO3 |
1. School of Future Transportation, Chang’an University, Xi’an 710064, China
2. School of Transportation Engineering, Chang’an University, Xi’an 710064, China
3. School of AutoMobile, Chang’an University, Xi’an 710064, China |
引用本文:
陈文强,冯琳越,王东丹,顾玉磊,赵轩. 融合动态风险图与多变量注意力机制的车辆轨迹预测模型[J]. 浙江大学学报(工学版), 2026, 60(3): 455-467.
Wenqiang CHEN,Linyue FENG,Dongdan WANG,Yulei GU,Xuan ZHAO. Vehicle trajectory prediction model integrating dynamic risk map and multivariate attention mechanism. Journal of ZheJiang University (Engineering Science), 2026, 60(3): 455-467.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2026.03.001
或
https://www.zjujournals.com/eng/CN/Y2026/V60/I3/455
|
| 1 |
GRIGORESCU S, TRASNEA B, COCIAS T, et al A survey of deep learning techniques for autonomous driving[J]. Journal of Field Robotics, 2020, 37 (3): 362- 386
doi: 10.1002/rob.21918
|
| 2 |
陈文强, 王东丹, 朱文英, 等 基于时空图注意力网络的车辆多模态轨迹预测模型[J]. 浙江大学学报: 工学版, 2025, 59 (3): 443- 450
CHEN Wenqiang, WANG Dongdan, ZHU Wenying, et al Vehicle multimodal trajectory prediction model based on spatiotemporal graph attention network[J]. Journal of Zhejiang University: Engineering Science, 2025, 59 (3): 443- 450
|
| 3 |
LEFÈVRE S, VASQUEZ D, LAUGIER C A survey on motion prediction and risk assessment for intelligent vehicles[J]. ROBOMECH Journal, 2014, 1 (1): 1
|
| 4 |
LEFKOPOULOS V, MENNER M, DOMAHIDI A, et al Interaction-aware motion prediction for autonomous driving: a multiple model Kalman filtering scheme[J]. IEEE Robotics and Automation Letters, 2021, 6 (1): 80- 87
doi: 10.1109/LRA.2020.3032079
|
| 5 |
WANG Y, WANG C, ZHAO W, et al Decision-making and planning method for autonomous vehicles based on motivation and risk assessment[J]. IEEE Transactions on Vehicular Technology, 2021, 70 (1): 107- 120
doi: 10.1109/TVT.2021.3049794
|
| 6 |
LI J, DAI B, LI X, et al A dynamic Bayesian network for vehicle maneuver prediction in highway driving scenarios: framework and verification[J]. Electronics, 2019, 8 (1): 40
doi: 10.3390/electronics8010040
|
| 7 |
STREUBEL T, HOFFMANN K H. Prediction of driver intended path at intersections [C]//Proceedings of the IEEE Intelligent Vehicles Symposium. [S. l. ]: IEEE, 2014: 134−139.
|
| 8 |
TRAN Q, FIRL J. Online maneuver recognition and multimodal trajectory prediction for intersection assistance using non-parametric regression [C]//2014 IEEE Intelligent Vehicles Symposium. Dearborn: IEEE, 2014: 118−123.
|
| 9 |
SCHREIER M, WILLERT V, ADAMY J. Bayesian, maneuver-based, long-term trajectory prediction and criticality assessment for driver assistance systems [C]//Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems. Qingdao: IEEE, 2014: 334–341.
|
| 10 |
REN Y Y, ZHAO L, ZHENG X L, et al A method for predicting diverse lane-changing trajectories of surrounding vehicles based on early detection of lane change[J]. IEEE Access, 2022, 10: 17451- 17472
|
| 11 |
LI J, MA H, ZHAN W, et al. Generic probabilistic interactive situation recognition and prediction: from virtual to real [C]//Proceedings of the 21st International Conference on Intelligent Transportation Systems. Maui: IEEE, 2018: 3218–3224.
|
| 12 |
DEO N, TRIVEDI M M. Convolutional social pooling for vehicle trajectory prediction [C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Salt Lake City: IEEE, 2018: 1549–15498.
|
| 13 |
GUPTA A, JOHNSON J, LI F F, et al. Social GAN: socially acceptable trajectories with generative adversarial networks [C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City: IEEE, 2018: 2255–2264.
|
| 14 |
ZHAO T, XU Y, MONFORT M, et al. Multi-agent tensor fusion for contextual trajectory prediction [C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Long Beach: IEEE, 2020: 12118–12126.
|
| 15 |
LI X, YING X, CHUAH M C. GRIP: graph-based interaction-aware trajectory prediction [C]//Proceedings of the IEEE Intelligent Transportation Systems Conference. Auckland: IEEE, 2019: 3960–3966.
|
| 16 |
ZHANG K, ZHAO L, DONG C, et al AI-TP: attention-based interaction-aware trajectory prediction for autonomous driving[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8 (1): 73- 83
|
| 17 |
MO X, XING Y, LV C. Graph and recurrent neural network-based vehicle trajectory prediction for highway driving [C]//Proceedings of the IEEE International Intelligent Transportation Systems Conference. Indianapolis: IEEE, 2021: 1934−1939.
|
| 18 |
HELBING D, MOLNÁR P Social force model for pedestrian dynamics[J]. Physical Review E, 1995, 51 (5): 4282- 4286
|
| 19 |
ALAHI A, GOEL K, RAMANATHAN V, et al. Social LSTM: human trajectory prediction in crowded spaces [C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 961–971.
|
| 20 |
MESSAOUD K, YAHIAOUI I, VERROUST-BLONDET A, et al Attention based vehicle trajectory prediction[J]. IEEE Transactions on Intelligent Vehicles, 2021, 6 (1): 175- 185
doi: 10.1109/TIV.2020.2991952
|
| 21 |
LIN L, LI W, BI H, et al Vehicle trajectory prediction using LSTMs with spatial–temporal attention mechanisms[J]. IEEE Intelligent Transportation Systems Magazine, 2022, 14 (2): 197- 208
doi: 10.1109/MITS.2021.3049404
|
| 22 |
GUO H, MENG Q, CAO D, et al Vehicle trajectory prediction method coupled with ego vehicle motion trend under dual attention mechanism[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 2507516
|
| 23 |
LI C, LIU Z, YANG N, et al Regional attention network with data-driven modal representation for multimodal trajectory prediction[J]. Expert Systems with Applications, 2023, 232: 120808
|
| 24 |
CHEN X, ZHANG H, ZHAO F, et al Intention-aware vehicle trajectory prediction based on spatial-temporal dynamic attention network for Internet of vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (10): 19471- 19483
doi: 10.1109/TITS.2022.3170551
|
| 25 |
DIEHL F, BRUNNER T, LE M T, et al. Graph neural networks for modelling traffic participant interaction [C]//Proceedings of the IEEE Intelligent Vehicles Symposium. Paris: IEEE, 2019: 695–701.
|
| 26 |
CHEN H. STGCN for modeling vehicle trajectory in highway scenario [C]//Proceedings of the 5th International Conference on Mechanical, Control and Computer Engineering. Harbin: IEEE, 2020: 1115−1118.
|
| 27 |
SHENG Z, XU Y, XUE S, et al Graph-based spatial-temporal convolutional network for vehicle trajectory prediction in autonomous driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (10): 17654- 17665
doi: 10.1109/TITS.2022.3155749
|
| 28 |
LI F J, ZHANG C Y, PHILIP CHEN C L STS-DGNN: vehicle trajectory prediction via dynamic graph neural network with spatial–temporal synchronization[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 2525413
|
| 29 |
VASWANI A, SHAZEER N, PARMAR N, et al Attention is all you need[J]. Advances in Neural Information Processing Systems, 2017, 30: 5998- 6008
|
| 30 |
QUINTANAR A, FERNÁNDEZ-LLORCA D, PARRA I, et al. Predicting vehicles trajectories in urban scenarios with transformer networks and augmented information [C]//Proceedings of the IEEE Intelligent Vehicles Symposium. Nagoya: IEEE, 2021: 1051–1056.
|
| 31 |
GENG M, LI J, XIA Y, et al A physics-informed Transformer model for vehicle trajectory prediction on highways[J]. Transportation Research Part C: Emerging Technologies, 2023, 154: 104272
doi: 10.1016/j.trc.2023.104272
|
| 32 |
GAO K, LI X, CHEN B, et al Dual transformer based prediction for lane change intentions and trajectories in mixed traffic environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24 (6): 6203- 6216
doi: 10.1109/TITS.2023.3248842
|
| 33 |
CHEN X, ZHANG H, ZHAO F, et al Vehicle trajectory prediction based on intention-aware non-autoregressive transformer with multi-attention learning for Internet of vehicles[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 2513912
|
| 34 |
XU D, SHANG X, LIU Y, et al Group vehicle trajectory prediction with global spatio-temporal graph[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8 (2): 1219- 1229
doi: 10.1109/TIV.2022.3200338
|
| 35 |
徐东伟, 程千兵, 顾同成, 等 基于时空交互特征融合的车辆轨迹预测方法研究[J]. 中国公路学报, 2025, 38 (11): 447- 458
XU Dongwei, CHENG Qianbing, GU Tongcheng, et al Research on vehicle trajectory prediction method based on spatio-temporal interaction feature fusion[J]. China Journal of Highway and Transport, 2025, 38 (11): 447- 458
|
| 36 |
CHEN C, CHEN X, GUO C, et al Trajectory prediction for autonomous driving based on structural informer method[J]. IEEE Transactions on Automation Science and Engineering, 2025, 22: 17452- 17463
|
| 37 |
WANG W, CHEN W, QIU Q, et al CrossFormer: a versatile vision transformer hinging on cross-scale attention[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45 (8): 10260- 10276
|
| 38 |
WANG J, WU J, ZHENG X, et al Driving safety field theory modeling and its application in pre-collision warning system[J]. Transportation Research Part C: Emerging Technologies, 2016, 72: 306- 324
doi: 10.1016/j.trc.2016.10.003
|
| 39 |
MA H, AN B, LI L, et al Anisotropy safety potential field model under intelligent and connected vehicle environment and its application in car-following modeling[J]. Journal of Intelligent and Connected Vehicles, 2023, 6 (2): 79- 90
doi: 10.26599/JICV.2023.9210006
|
| 40 |
袁阳阳. 基于近似模型的汽车尾部结构减阻优化 [D]. 重庆: 重庆交通大学, 2018.
YUAN Yangyang. Drag reduction optimization of vehicle rear structure based on approximate model [D]. Chongqing: Chongqing Jiaotong University, 2018.
|
| 41 |
李文中, 王立, 李振兴, 等 不同尺寸车身轻量化评价及重量目标设定[J]. 汽车实用技术, 2020, 45 (19): 122- 124
LI Wenzhong, WANG Li, LI Zhenxing, et al BIW lightweight evaluation and weight target setting method for different size vehicle[J]. Automobile Applied Technology, 2020, 45 (19): 122- 124
doi: 10.16638/j.cnki.1671-7988.2020.19.039
|
| 42 |
WOLF M T, BURDICK J W. Artificial potential functions for highway driving with collision avoidance [C]//Proceedings of the IEEE International Conference on Robotics and Automation. Pasadena: IEEE, 2008: 3731–3736.
|
| 43 |
LI L, GAN J, JI X, et al Dynamic driving risk potential field model under the connected and automated vehicles environment and its application in car-following modeling[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (1): 122- 141
doi: 10.1109/TITS.2020.3008284
|
| 44 |
LV P, WANG W, WANG Y, et al SSAGCN: social soft attention graph convolution network for pedestrian trajectory prediction[J]. IEEE Transactions on Neural Networks and Learning Systems, 2024, 35 (9): 11989- 12003
doi: 10.1109/TNNLS.2023.3250485
|
| 45 |
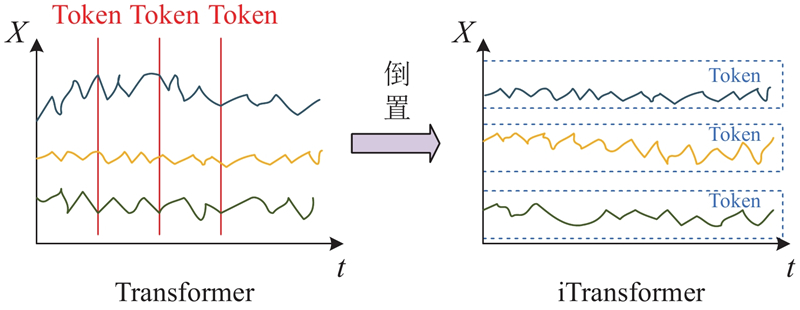
LIU Y, HU T, ZHANG H, et al. iTransformer: inverted transformers are effective for time series forecasting [EB/OL]. [2025−09−10]. https://arxiv.org/abs/2310.06625.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|