| 计算机技术、控制工程 |
|

|
|
|
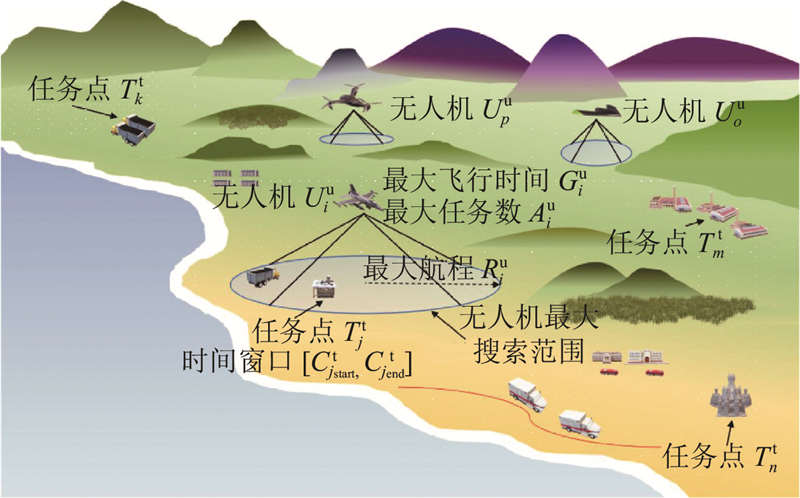
| 战场环境下遗传黏菌算法的多机协同任务分配 |
薛雅丽1( ),李寒雁1,欧阳权1,*(),崔闪2,洪君2 ),李寒雁1,欧阳权1,*(),崔闪2,洪君2 |
1. 南京航空航天大学 自动化学院,江苏 南京 211106
2. 上海机电工程研究所,上海 201109 |
|
| Multi-UAVs collaborative task allocation based on genetic slime mould algorithm in battlefield environment |
| Yali XUE1(),Hanyan LI1,Quan OUYANG1,*(),Shan CUI2,Jun HONG2 |
1. School of Automation, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
2. Shanghai Electro-Mechanical Engineering Institute, Shanghai 201109, China |
引用本文:
薛雅丽,李寒雁,欧阳权,崔闪,洪君. 战场环境下遗传黏菌算法的多机协同任务分配[J]. 浙江大学学报(工学版), 2024, 58(8): 1748-1756.
Yali XUE,Hanyan LI,Quan OUYANG,Shan CUI,Jun HONG. Multi-UAVs collaborative task allocation based on genetic slime mould algorithm in battlefield environment. Journal of ZheJiang University (Engineering Science), 2024, 58(8): 1748-1756.
链接本文:
https://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2024.08.021
或
https://www.zjujournals.com/eng/CN/Y2024/V58/I8/1748
|
| 1 |
ZHU X. Analysis of military application of UAV swarm technology [C]// 3rd International Conference on Unmanned Systems . Harbin: IEEE, 2020: 1200-1204.
|
| 2 |
GANCHIMEG B, GEETHA S, JEONGHWAN J Analysis of technological trends and technological portfolio of unmanned aerial vehicle[J]. Journal of Open Innovation: Technology, Market, and Complexity, 2020, 6 (3): 48
doi: 10.3390/joitmc6030048
|
| 3 |
ZHOU Y, RAO B, WANG W UAV swarm intelligence: recent advances and future trends[J]. IEEE Access, 2020, 8: 183856- 183878
doi: 10.1109/ACCESS.2020.3028865
|
| 4 |
TANG J, DUAN H, LAO S Swarm intelligence algorithms for multiple unmanned aerial vehicles collaboration: a comprehensive review[J]. Artificial Intelligence Review, 2023, 56 (5): 4295- 4327
doi: 10.1007/s10462-022-10281-7
|
| 5 |
齐小刚, 李博, 范英盛, 等 多约束下多无人机的任务规划研究综述[J]. 智能系统学报, 2020, 15 (2): 204- 217
QI Xiaogang, LI Bo, FAN Yingsheng, et al A survey of mission planning on UAVs systems based on multiple constraints[J]. CAAI Transactions on Intelligent Systems, 2020, 15 (2): 204- 217
|
| 6 |
KIM J, OH H, YU B, et al. [J]. International Journal of Aeronautical and Space Sciences , 2020, 22(2): 456-467.
|
| 7 |
LU Y, MA Y, WANG J, et al Task assignment of UAV swarm based on wolf pack algorithm[J]. Applied Sciences, 2020, 10 (23): 8335
doi: 10.3390/app10238335
|
| 8 |
POZNA C, PRECUP R E, HORVÁTH E, et al Hybrid particle filter–particle swarm optimization algorithm and application to fuzzy controlled servo systems[J]. IEEE Transactions on Fuzzy Systems, 2022, 30 (10): 4286- 4297
doi: 10.1109/TFUZZ.2022.3146986
|
| 9 |
HUO L, ZHU J, WU G, et al A novel simulated annealing based strategy for balanced UAV task assignment and path planning[J]. Sensors (Basel), 2020, 20 (17): 4769
doi: 10.3390/s20174769
|
| 10 |
DENG W, ZHANG X, ZHOU Y, et al An enhanced fast non-dominated solution sorting genetic algorithm for multi-objective problems[J]. Information Sciences, 2022, 585: 441- 453
doi: 10.1016/j.ins.2021.11.052
|
| 11 |
GONG X, RONG Z, WANG J, et al A hybrid algorithm based on state-adaptive slime mould model and fractional-order ant system for the travelling salesman problem[J]. Complex and Intelligent Systems, 2023, 9 (4): 3951- 3970
doi: 10.1007/s40747-022-00932-1
|
| 12 |
CHEN X, LIU Y, YIN L, et al Cooperative task assignment and track planning for multi-UAV attack mobile targets[J]. Journal of Intelligent and Robotic Systems, 2020, 100 (3): 1383- 1400
|
| 13 |
QIN B, ZHANG D, TANG S, et al Distributed grouping cooperative dynamic task assignment method of UAV swarm[J]. Applied Sciences, 2022, 12 (6): 2865
doi: 10.3390/app12062865
|
| 14 |
LUO R, ZHENG H, GUO J Solving the multi-functional heterogeneous UAV cooperative mission planning problem using multi-swarm fruit fly optimization algorithm[J]. Sensors, 2020, 20 (18): 5026
doi: 10.3390/s20185026
|
| 15 |
魏兆恬, 赵晓林, 李俊涛, 等 考虑时间窗约束的多无人机任务分配[J]. 电光与控制, 2022, 29 (8): 17- 22
WEI Zhaotian, ZHAO Xiaolin, LI Juntao, et al Multi-UAV task allocation under time window constraints[J]. Electronics Optics and Control, 2022, 29 (8): 17- 22
|
| 16 |
AN Y, CHEN X, GAO K, et al A hybrid multi-objective evolutionary algorithm for solving an adaptive flexible job-shop rescheduling problem with real-time order acceptance and condition-based preventive maintenance[J]. Expert Systems with Applications, 2023, 212: 118711
doi: 10.1016/j.eswa.2022.118711
|
| 17 |
JIANG S, ZOU J, YANG S, et al Evolutionary dynamic multi-objective optimisation: a survey[J]. ACM Computing Surveys, 2022, 55 (4): 1- 47
|
| 18 |
HU C, QU G, ZHANG Y Pigeon-inspired fuzzy multi-objective task allocation of unmanned aerial vehicles for multi-target tracking[J]. Applied Soft Computing, 2022, 126: 109310
doi: 10.1016/j.asoc.2022.109310
|
| 19 |
CHEN L, LIU W L, ZHONG J An efficient multi-objective ant colony optimization for task allocation of heterogeneous unmanned aerial vehicles[J]. Journal of Computational Science, 2022, 58: 101545
doi: 10.1016/j.jocs.2021.101545
|
| 20 |
PENG H, MEI C, ZHANG S, et al Multi-strategy dynamic multi-objective evolutionary algorithm with hybrid environmental change responses[J]. Swarm and Evolutionary Computation, 2023, 82: 101356
doi: 10.1016/j.swevo.2023.101356
|
| 21 |
ZAREB M, NOUIBAT W, BESTAOUI Y, et al Evolutionary autopilot design approach for UAV quadrotor by using GA[J]. Iranian Journal of Science and Technology, Transactions of Electrical Engineering, 2020, 44 (1): 347- 375
doi: 10.1007/s40998-019-00214-6
|
| 22 |
LI S, CHEN H, WANG M, et al Slime mould algorithm: a new method for stochastic optimization[J]. Future Generation Computer Systems, 2020, 111: 300- 323
doi: 10.1016/j.future.2020.03.055
|
| 23 |
陈杰, 薛雅丽, 叶金泽 基于改进狼群算法的多机协同目标分配研究[J]. 吉林大学学报: 信息科学版, 2022, 40 (1): 20- 29
CHEN Jie, XUE Yali, YE Jinze Research on multi-aircraft cooperative target assignment based on improved wolves algorithm[J]. Journal of Jilin University: Information Science Edition, 2022, 40 (1): 20- 29
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|